Object-retrieving Autonomous Robotic Arm
ŌĆó
0 likesŌĆó535 views

Poster for our presentation on our Autonomous Robotic Arm that detects objects with an overhead camera, uses motion planning and reverse kinematics to retrieve objects, and places the objects in a bin. This project was done as part of the EECS 498 Autonomous Robotics Lab at the University of Michigan.
Convert to study guideBETA
Transform any presentation into a summarized study guide, highlighting the most important points and key insights.
Object-retrieving Autonomous Robotic Arm
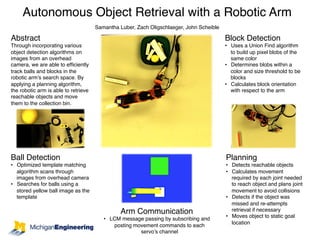
- 1. Autonomous Object Retrieval with a Robotic Arm! ! Samantha Luber, Zach Oligschlaeger, John Scheible! Abstract! Block Detection! Through incorporating various ŌĆóŌĆ» Uses a Union Find algorithm object detection algorithms on to build up pixel blobs of the images from an overhead same color! camera, we are able to ef’¼üciently ŌĆóŌĆ» Determines blobs within a track balls and blocks in the color and size threshold to be robotic armŌĆÖs search space. By blocks! applying a planning algorithm, ŌĆóŌĆ» Calculates block orientation the robotic arm is able to retrieve with respect to the arm! reachable objects and move them to the collection bin. ! Ball Detection! Planning! ŌĆóŌĆ» Optimized template matching ŌĆóŌĆ» Detects reachable objects! algorithm scans through ŌĆóŌĆ» Calculates movement images from overhead camera! required by each joint needed ŌĆóŌĆ» Searches for balls using a to reach object and plans joint stored yellow ball image as the movement to avoid collisions! template! ŌĆóŌĆ» Detects if the object was missed and re-attempts Arm Communication! retrieval if necessary! ŌĆóŌĆ» Moves object to static goal ŌĆóŌĆ» LCM message passing by subscribing and location! posting movement commands to each servoŌĆÖs channel!