
PENGENALAN KEPADA ROBOTIK- ASAS ROBOTIK.ppt
- 2. Takrif Robotik Pengetahuan tentang robot Takrif Robot Peralatan mekatronik yang boleh berkendali secara automatik Kepentingan 1. Menghasilkan pengeluaran yang berkualiti dengan kuantiti yang besar 2. Dapat bekerja dalam suasana bahaya 3. Dapat bekerja tanpa letih dan cuti 4. Memberi kejituan tinggi 5. Lebih cepat dan tepat
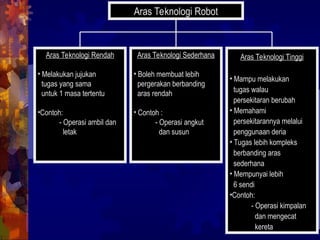
- 3. Aras Teknologi Sederhana ŌĆó Boleh membuat lebih pergerakan berbanding aras rendah ŌĆó Contoh : - Operasi angkut dan susun Aras Teknologi Rendah ŌĆó Melakukan jujukan tugas yang sama untuk 1 masa tertentu ŌĆóContoh: - Operasi ambil dan letak Aras Teknologi Tinggi ŌĆó Mampu melakukan tugas walau persekitaran berubah ŌĆó Memahami persekitarannya melalui penggunaan deria ŌĆó Tugas lebih kompleks berbanding aras sederhana ŌĆó Mempunyai lebih 6 sendi ŌĆóContoh: - Operasi kimpalan dan mengecat kereta Aras Teknologi Robot
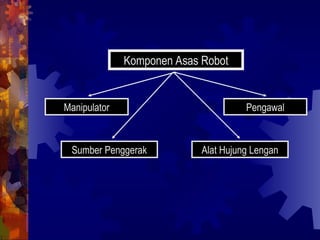
- 4. Komponen Asas Robot Manipulator Sumber Penggerak Pengawal Alat Hujung Lengan
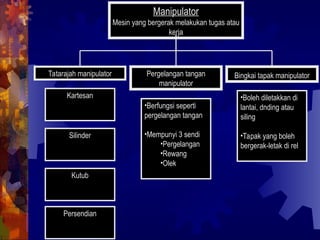
- 5. Pergelangan tangan manipulator Tatarajah manipulator Bingkai tapak manipulator Manipulator Mesin yang bergerak melakukan tugas atau kerja Kartesan Silinder Kutub Persendian ŌĆóBerfungsi seperti pergelangan tangan ŌĆóMempunyi 3 sendi ŌĆóPergelangan ŌĆóRewang ŌĆóOlek ŌĆóBoleh diletakkan di lantai, dnding atau siling ŌĆóTapak yang boleh bergerak-letak di rel
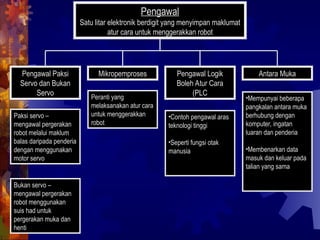
- 6. Pengawal Paksi Servo dan Bukan Servo Mikropemproses Pengawal Logik Boleh Atur Cara (PLC Antara Muka Pengawal Satu litar elektronik berdigit yang menyimpan maklumat atur cara untuk menggerakkan robot Paksi servo ŌĆō mengawal pergerakan robot melalui maklum balas daripada penderia dengan menggunakan motor servo Bukan servo ŌĆō mengawal pergerakan robot menggunakan suis had untuk pergerakan muka dan henti Peranti yang melaksanakan atur cara untuk menggerakkan robot ŌĆóMempunyai beberapa pangkalan antara muka berhubung dengan komputer, ingatan luaran dan penderia ŌĆóMembenarkan data masuk dan keluar pada talian yang sama ŌĆóContoh pengawal aras teknologi tinggi ŌĆóSeperti fungsi otak manusia
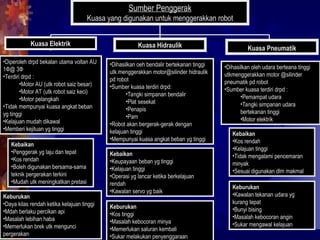
- 7. Kuasa Hidraulik Sumber Penggerak Kuasa yang digunakan untuk menggerakkan robot ŌĆóDiperoleh drpd bekalan utama voltan AU 1ąż@ 3ąż ŌĆóTerdiri drpd : ŌĆóMotor AU (utk robot saiz besar) ŌĆóMotor AT (utk robot saiz keci) ŌĆóMotor pelangkah ŌĆóTidak mempunyai kuasa angkat beban yg tinggi ŌĆóKelajuan mudah dikawal ŌĆóMemberi kejituan yg tinggi Kuasa Pneumatik Kuasa Elektrik ŌĆóDihasilkan oleh udara berteana tinggi utkmenggerakkan motor @silinder pneumatik pd robot ŌĆóSumber kuasa terdiri drpd : ŌĆóPemampat udara ŌĆóTangki simpanan udara bertekanan tinggi ŌĆóMotor elektrik ŌĆóDihasilkan oeh bendalir bertekanan tinggi utk menggerakkan motor@silinder hidraulik pd robot ŌĆóSumber kuasa terdiri drpd: ŌĆóTangki simpanan bendalir ŌĆóPlat sesekat ŌĆóPenapis ŌĆóPam ŌĆóRobot akan bergerak-gerak dengan kelajuan tinggi ŌĆóMempunyai kuasa angkat beban yg tinggi Kebaikan ŌĆóPenggerak yg laju dan tepat ŌĆóKos rendah ŌĆóBoleh digunakan bersama-sama teknik pergerakan terkini ŌĆóMudah utk meningkatkan pretasi Kebaikan ŌĆóKos rendah ŌĆóKelajuan tinggi ŌĆóTidak mengalami pencemaran minyak ŌĆóSesuai digunakan dlm makmal Kebaikan ŌĆóKeupayaan beban yg tinggi ŌĆóKelajuan tinggi ŌĆóOperasi yg lancar ketika berkelajuan rendah ŌĆóKawalan servo yg baik Keburukan ŌĆóKawalan tekanan udara yg kurang tepat ŌĆóBunyi bising ŌĆóMasalah kebocoran angin ŌĆóSukar mengawal kelajuan Keburukan ŌĆóKos tinggi ŌĆóMasalah kebocoran minya ŌĆóMemerlukan saluran kembali ŌĆóSukar melakukan penyenggaraan Keburukan ŌĆóDaya kilas rendah ketika kelajuan tinggi ŌĆóMdah berlaku percikan api ŌĆóMasalah lebihan haba ŌĆóMemerlukan brek utk mengunci pergerakan
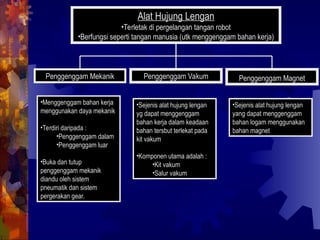
- 8. Penggenggam Vakum Penggenggam Mekanik Penggenggam Magnet ŌĆóMenggenggam bahan kerja menggunakan daya mekanik ŌĆóTerdiri daripada : ŌĆóPenggenggam dalam ŌĆóPenggenggam luar ŌĆóBuka dan tutup penggenggam mekanik diandu oleh sistem pneumatik dan sistem pergerakan gear. Alat Hujung Lengan ŌĆóTerletak di pergelangan tangan robot ŌĆóBerfungsi seperti tangan manusia (utk menggenggam bahan kerja) ŌĆóSejenis alat hujung lengan yg dapat menggenggam bahan kerja dalam keadaan bahan tersbut terlekat pada kit vakum ŌĆóKomponen utama adalah : ŌĆóKit vakum ŌĆóSalur vakum ŌĆóSejenis alat hujung lengan yang dapat menggenggam bahan logam menggunakan bahan magnet
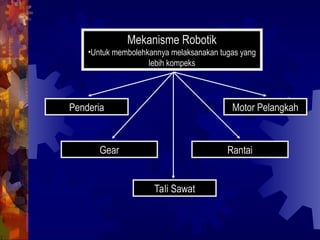
- 9. Mekanisme Robotik ŌĆóUntuk membolehkannya melaksanakan tugas yang lebih kompeks Penderia Gear Motor Pelangkah Rantai Tali Sawat
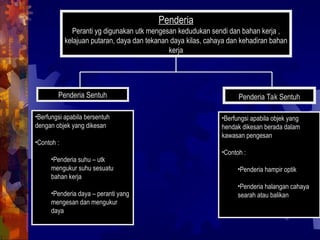
- 10. Penderia Sentuh Penderia Tak Sentuh Penderia Peranti yg digunakan utk mengesan kedudukan sendi dan bahan kerja , kelajuan putaran, daya dan tekanan daya kilas, cahaya dan kehadiran bahan kerja ŌĆóBerfungsi apabila bersentuh dengan objek yang dikesan ŌĆóContoh : ŌĆóPenderia suhu ŌĆō utk mengukur suhu sesuatu bahan kerja ŌĆóPenderia daya ŌĆō peranti yang mengesan dan mengukur daya ŌĆóBerfungsi apabila objek yang hendak dikesan berada dalam kawasan pengesan ŌĆóContoh : ŌĆóPenderia hampir optik ŌĆóPenderia halangan cahaya searah atau balikan
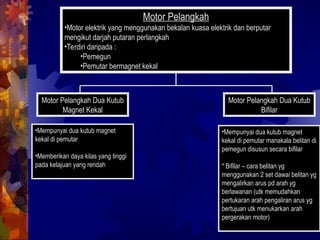
- 11. Motor Pelangkah ŌĆóMotor elektrik yang menggunakan bekalan kuasa elektrik dan berputar mengikut darjah putaran perlangkah ŌĆóTerdiri daripada : ŌĆóPemegun ŌĆóPemutar bermagnet kekal ŌĆóMempunyai dua kutub magnet kekal di pemutar ŌĆóMemberikan daya kilas yang tinggi pada kelajuan yang rendah ŌĆóMempunyai dua kutub magnet kekal di pemutar manakala belitan di pemegun disusun secara bifilar * Bifilar ŌĆō cara belitan yg menggunakan 2 set dawai belitan yg mengalirkan arus pd arah yg berlawanan (utk memudahkan pertukaran arah pengaliran arus yg bertujuan utk menukarkan arah pergerakan motor) Motor Pelangkah Dua Kutub Bifilar Motor Pelangkah Dua Kutub Magnet Kekal
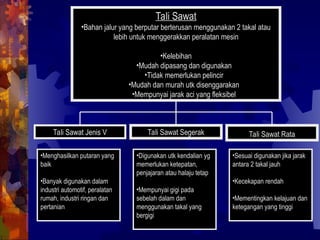
- 12. Tali Sawat Segerak Tali Sawat Jenis V Tali Sawat Rata ŌĆóMenghasilkan putaran yang baik ŌĆóBanyak digunakan dalam industri automotif, peralatan rumah, industri ringan dan pertanian Tali Sawat ŌĆóBahan jalur yang berputar berterusan menggunakan 2 takal atau lebih untuk menggerakkan peralatan mesin ŌĆóKelebihan ŌĆóMudah dipasang dan digunakan ŌĆóTidak memerlukan pelincir ŌĆóMudah dan murah utk disenggarakan ŌĆóMempunyai jarak aci yang fleksibel ŌĆóDigunakan utk kendalian yg memerlukan ketepatan, penjajaran atau halaju tetap ŌĆóMempunyai gigi pada sebelah dalam dan menggunakan takal yang bergigi ŌĆóSesuai digunakan jika jarak antara 2 takal jauh ŌĆóKecekapan rendah ŌĆóMementingkan kelajuan dan ketegangan yang tinggi
- 13. Rangkaian Gear ŌĆóTerdiri daripada beberapa gear yang disambung bersama utk membolehkan pemindahan kuasa dan menukarkan arah putaran Jenis Gear Rangkaian Biasa Gear ŌĆóSatu bulatan yang bergigi disekelilingnya dan sentiasa bekerja berpasangan ŌĆóMempunyai aci pada bahagian tengahnya ŌĆóRobot menggunakan gear utk menukarkan arah pergerakannya ŌĆóBoleh digunakan utk meningkatkan atau mengurangkan kelajuan putaran Rangkaian Planet Gear Taji Gear Heliks Gear Ulir
- 14. TAMAT