















Pengenalan Robotik (RBT3073 Teknologi Elektrik dan Elektronik)
- 1. Robotik -Pengenalan kepada Robot & Robotik Disediakan oleh: Kan HuoyTsyr Lee Siaw Hiong
- 2. ŌĆó Robot ’āśberasal dr bahasa Czech, ŌĆ£Robota" = pekerja ’āśsebuah alat mekanikal yang boleh melakukan tugas fizikal, baik menggunakan pengawasan dan kawalan manusia, ataupun menggunakan program yang telah ditakrifkan terlebih dulu (kecerdasan buatan). ŌĆó Robotik ’āśSatu seni, pengetahuan asas ŌĆ£know-howŌĆØ dlm rekabentuk, aplikasi dan menggunakan robot
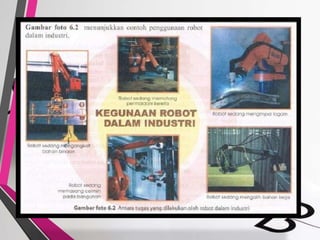
- 3. 1. Mewujudkan tenaga kerja yang berprestasi tinggi dan boleh bekerja 24 jam. 2. Untuk menjalankan kerja-kerja yang memerlukan ketelitian/ kejituan tinggi. 3. Menggantikan manusia dalam kerja-kerja yang bersifat selalu berulang-ulang tanpa rasa letih 4. Untuk dapat bekerja pada tempat yang berbahaya bagi manusia
- 4. 1. operasi pengawasan ’ā╝penggunaan kamera untuk mengesan pesalah jalan raya 2.operasi perubatan ’ā╝melakukan pembedahan pemindahan tulang dan sendi manusia 3. operasi membantu orang tidak upaya ’ā╝mengambil makanan dll
- 5. 4.operasi di kawasan berbahaya ’ā╝membersih & menyelenggara sistem (kawasan radioaktif) 5.operasi pembersihan bawah laut ’ā╝membersih tumpahan minyak
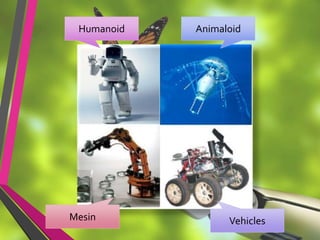
- 8. 1. Humanoid ’é¦ Bentuk robot ini menyerupai manusia. Mempunyai dua kaki, mempunyai tangan, seperti manusia. 2. Animaloid ’é¦ Bentuk robot ini menyerupai binatang, mempunyai perilaku seperti binatang dan bergerak seperti binatang.
- 9. 3. Mesin ’āśbentuk robot ini biasanya bergantung keperluan atau fungsi robot itu. 4. Vehicles ’āśbentuk robot ini mempunyai roda.
- 11. 1. ARASTEKNOLOGI RENDAH ŌĆó Menjalankan kerja yang sama untuk satu masa tertentu ŌĆó Kawalan pergerakan tetap dan tak boleh diubah semasa berkendali ŌĆó Mempunyai 4 sendi dan dikawal pengawal elektronik ŌĆó Mempunyai ketepatan sistem yang lebih tinggi-hanya melakukan kerja mudah
- 12. 2. ARASTEKNOLOGI SEDERHANA ŌĆó Lebih banyak pergerakan ŌĆó Laluan pergerakan secara insani selepas bekalan kuasa diputuskan. ŌĆó Mempunyai 6 sendi dan dikawal oleh Microproses 8 bit atau 6 bit ŌĆó Boleh melakukan kerja yang kompleks
- 13. 3. ARASTEKNOLOGITINGGI ŌĆó Melakukan kerja walaupun ada ojek menghalang ŌĆó Menggunakan penderia ŌĆó Mempunyai lebih 6 sendi dan dikawal oleh microproses 16 bit ke atas. ŌĆó Melakukan kerja yang lebih kompleks
- 14. Ciri Aras Teknologi Robot
- 15. Dalam pembuatan robot dilakukan 3Tahap iaitu: 1. Tahap Mekanik ŌĆó Di tahap ini robot dibuat bentuk dan rangkanya terlebih dahulu dengan mengambil kira banyak perkara. ŌĆó rancangan bentuk harus sesuai dengan tujuan utama robot iaitu dibuat untuk apa
- 16. 2. Tahap Elektronik ŌĆó Ditahap ini, robot dilengkapi dengan elektronik yang akan digunakan untuk bergeraknya robot. ŌĆó Termasuk Motor Roda, MC, Sound Detector, OPTOCOUPLER, sensor. ŌĆó Untuk pembuatan rangkaian elektronika ini dapat dengan menggunakan perhitungan atau juga boleh didapati di internet.
- 17. 3. Tahap programing ŌĆó Tahap ini merupakan tahap terakhir yang dilakukan kerana untuk melihat hasil dari tahap ini harus melalui 2 tahap sebelumnya. ŌĆó Tahap programing ini juga mempunyai tahap tersendiri iaitu pembuatan Algoritma, Pembuatan Kod Program, Kompilasi Program Dan Download Program ke MicroControler.