көҗнҶө мІҙмҰқмқҳ кіјн•ҷ.pptx
Download as pptx, pdf0 likes221 views

Local interactions between drivers can lead to traffic jams even without any external inhomogeneities, due to human overreaction and limited acceleration/deceleration capabilities. The model shows strong hysteresis between synchronized and jammed phases - it is difficult to transition back from a jammed to synchronized state by just decreasing vehicle density. A proposed solution is for autonomous cruise control systems to avoid overreaction when approaching a downstream jam by driving more carefully, which can dissolve jams and remove hysteresis.
1 of 25
Download to read offline
Ad
Recommended
C%f3mo%20obtienen%20nutrientes%20las%20c%e9lulasTalГӯa AcuГұa
Мэ
El documento explica cГіmo las cГ©lulas de los organismos pluricelulares obtienen los nutrientes necesarios para sobrevivir. Estos organismos tienen sistemas de Гіrganos como el digestivo, respiratorio y circulatorio que trabajan juntos para llevar oxГӯgeno, nutrientes digeridos y desechos a todas las cГ©lulas del cuerpo. El sistema digestivo digiere los alimentos en molГ©culas mГЎs pequeГұas, el sistema circulatorio transporta estos nutrientes a las cГ©lulas, y el sistema respiratorio suministra oxГӯgeno necesario para la resministerio de educacion Prueba diagnostica de quintoNELLYKATTY
Мэ
1) El documento presenta un cuento satГӯrico que propone convertir la energГӯa cinГ©tica de los niГұos en electricidad mediante un dispositivo llamado Baby H.P.
2) El Baby H.P. recoge los movimientos de los niГұos y los transforma en electricidad almacenada en una botella de Leyden que puede usarse para alimentar artefactos elГ©ctricos.
3) El cuento sugiere que las familias pueden ahorrar en su factura elГ©ctrica e incluso vender excedentes instalando un Baby H.P. enSj kseminar ryosukenishi_for_slideshare
Sj kseminar ryosukenishi_for_slidesharesgocvianfwefvdsd0129vnalc
Мэ
This document proposes a method for improving highway traffic merging by tuning each car's behavior. It discusses using car-to-car interactions to induce zipper merging configurations through modeling car movements with a cellular automata approach. Simulations show that drawing "orange lines" to ban lane changes and introduce repulsive interactions between cars can spatially change configurations to achieve larger degrees of zipper merging. This results in improved merging efficiency and increased traffic flow rates compared to non-zipper merging, especially when there is a delay for cars to restart after stopping.Brian Deegan - GB Cycle Embassy Infrastructure Summit 2015
Brian Deegan - GB Cycle Embassy Infrastructure Summit 2015Cycling-Embassy
Мэ
The document outlines key principles for improving cycling infrastructure, emphasizing the importance of traffic management, safety, and cyclists' positioning on the road. It critiques existing policies and infrastructure designs while providing guidance on effective route planning and measures to enhance cyclist experiences. Additionally, it highlights the significance of sound levels in assessing cycling routes and calls for design innovations to reduce cyclists' effort and improve safety.Vehicle dynamics course
Vehicle dynamics courseabdulrahman maddallah
Мэ
This document provides an overview of a vehicle dynamics course. It discusses topics that will be covered such as vehicle dynamics fundamentals, load transfer, acceleration and braking performance, wheel alignment, handling, ride forces, suspension technologies, tires, and vehicle dynamic tests. The course will examine chapters on vehicle dynamics, longitudinal and lateral load transfer, tractive effort and forces, weight transfer, and the relationship between road loads and tractive resistance. It also provides examples of vehicle dynamic field tests. The goal is for students to gain an understanding of key vehicle dynamics concepts and metrics.Case study- rolling barrier system
Case study- rolling barrier systemmechmitaoe
Мэ
The document presents a case study on a rolling barrier system designed to reduce road accidents. It discusses how road accidents are a major issue in India, causing many injuries and deaths each year. A new concept called the rolling barrier system was designed, which uses urethane barrels that absorb impact through rotational motion rather than stopping the vehicle abruptly. Test results showed it was able to redirect vehicles back onto the road safely. The system aims to provide a softer barrier that is less likely to cause harm compared to rigid barriers, while still preventing vehicles from leaving the road. Some limitations include higher costs than other barriers and needing maintenance due to heat effects on the urethane material.Battery buggy10
Battery buggy10mfrye1954
Мэ
This document provides instructions and rules for a battery-powered vehicle competition called Battery Buggy '10. It summarizes:
1) The objective is for a battery-powered vehicle to travel a specified distance as quickly as possible and stop as close to the center of the finish line.
2) The vehicle must meet requirements like being powered by batteries rated at 1.5V or less, having a 26cm wheelbase and less than 19cm track width. It must start with a switch and stop without outside assistance.
3) Scoring is based on time to complete the distance, how close the vehicle stops to the center, and whether it stays on the center line. The goal is the lowest combinedDescribing Motion 2012
Describing Motion 2012Stephen Taylor
Мэ
The document provides an introduction to describing motion through kinematics. It discusses key concepts such as scalars and vectors, distance and displacement, speed and velocity. It presents various methods for describing displacement including using components, magnitude and direction, and vector diagrams. The document also examines how to calculate speed and velocity from changes in distance or displacement over time. Graphs such as distance-time and velocity-time graphs are introduced as ways to represent motion. Students are encouraged to practice these concepts through activities such as an orienteering course and analyzing motion data.Traffic engineering macroscopic
Traffic engineering macroscopic ShaikhAtif12
Мэ
This document analyzes shockwave formation and propagation behind a slow moving truck. It contains the following key points:
1. A slow moving truck at 10 mph creates a shockwave that moves at the same speed (10 mph) in front of it, slowing traffic. A second shockwave forms behind it, moving at 2.1 mph, as traffic builds up in a platoon.
2. For a 10 minute period, the front of the platoon travels 1.67 miles while the rear travels 0.35 miles, extending the platoon to a maximum length of 1.32 miles containing 159 vehicles.
3. When the truck exits after 10 minutes, the platoon dissipates as the front shockwave now movesAutomatic transmission (torque converter)
Automatic transmission (torque converter)Cv raman college of engineering
Мэ
This document is a project report on automatic transmission systems submitted by Saswat DaS to his professors at C.V Raman Global University. It provides an overview of automatic transmissions, including their components like planetary gear sets, hydraulic systems, and computer controls. It describes different types of automatic transmissions like continuously variable transmission, dual clutch transmission, and torque converter transmission. It also discusses advantages like smooth shifting and disadvantages like higher costs compared to manual transmissions. The conclusion is that while manual transmissions have been around longer, automatic transmissions are eliminating the need for a clutch pedal and are the future of transmissions.Automatic side stand remover
Automatic side stand removerSaurav Sd
Мэ
The project presents a fully automatic self side stand removal system for two-wheelers aimed at preventing accidents caused by forgetting to remove the side stand. It addresses the limitations of previous methods such as buzzer and gear pedal systems, offering a more efficient mechanical solution that operates without dependency on moisture or power supply. The expected results indicate that this mechanical system is applicable and advantageous for two-wheelers, requiring minimal maintenance.TheGrafixCard
TheGrafixCardCitizens for Accountable Governance
Мэ
The Kidney-Spine Traffic Project proposes a unique traffic system consisting of a central island with twin kidney shapes and surrounding road lanes. Vehicles flow around the island using four elongated U-turns. Two special lanes in the center allow direct passage for highway users. This system aims to reduce traffic congestion, accidents, and travel times compared to traditional four-way intersections or flyovers by slowing traffic and reducing conflict points. The project team estimates the system could be built for 1 crore and would generate employment while reducing government road maintenance costs if implemented. Challenges include modifying existing infrastructure and ensuring orderly traffic flow, but signs, monitoring, and driver education could help address these.Lithium For Everything?
Lithium For Everything? Glenn Green
Мэ
The presentation by Glenn Austin Green discusses the importance of selecting the right battery chemistry for electric vehicle (EV) applications, focusing on the advantages and limitations of lithium-ion (Li-ion) and nickel metal hydride (NiMH) batteries. With over 17 years of experience, EVB Technology emphasizes real-world case studies to illustrate that performance can vary significantly based on operating environments and application needs. The document highlights the potential for reduced emissions and cost-effective solutions in specific applications, aiming to inform customer decisions based on their requirements.Traffic volume studies
Traffic volume studiesJanak Parmar
Мэ
Traffic volume studies collect data on the number of vehicles and pedestrians passing a point on a roadway over a period of time. This data is used for planning, design, and operations purposes. There are manual and automatic methods for conducting these studies. Manual methods involve human counters while automatic methods use sensors. The data collected is used to determine metrics like average daily traffic, peak hour volumes, and directional distribution which are then used for roadway design and traffic management.Design & Fabrication of Road Power Generator2
Design & Fabrication of Road Power Generator2Zulfiqar Ali
Мэ
This document describes the design and fabrication of a road power generator (RPG) by Zulfiqar Ali and their team. The RPG aims to capture wasted kinetic energy from vehicles to generate electricity. It works by using an activator plate that converts vehicle motion into rotational energy via a rack and pinion system. This energy is then amplified using pulleys and stored in a flywheel connected to a generator. The document outlines the working principle, methods used, contributions made in designing components like the activator plate, and calculations showing the RPG can generate around 1 kW of power per day. Challenges faced and advantages like being environmentally friendly and requiring no fuel are also discussed.Session 61 Robert Thomson
Session 61 Robert ThomsonRWThomson
Мэ
This document summarizes a project investigating ways to improve motorcycle safety on roads in Sweden. It finds that most single-vehicle motorcycle crashes occur on curves at speeds of 70-90 km/h. Testing of motorcycle riders' emergency maneuvers showed average response times of around 2 seconds, with responses slightly slower in curves. The project aims to determine safe distances between road edges and guardrails to allow motorcycles room to recover from errors. It also seeks to identify design improvements that keep motorcycles stable and upright to avoid collisions with roadside objects. Future work includes further studying needed recovery areas and integrating vehicle and infrastructure developments.Electricity generation using speed breaker
Electricity generation using speed breakerRaza Ishtiaq
Мэ
This document presents a project on 'Electricity Generation from Speed Breakers' aimed at harnessing the kinetic energy from vehicles passing over speed breakers to generate electrical power. It details the project team, acknowledgments, objectives, system design, materials required, testing, and troubleshooting processes involved in the development of the prototype. The project emphasizes the potential of utilizing renewable energy sources to address power shortages in light of conventional sources being depleting.ROAD ACCIDENTS ppt . xlx.pptx by Lps Eldeco
ROAD ACCIDENTS ppt . xlx.pptx by Lps Eldecoxaditya0099
Мэ
This document outlines a project to prevent road accidents. It introduces the growing problem of road accidents globally and the concepts and equipment used in the project. These include toy cars, springs, syringes and piezoelectric crystals. The project uses spring bumpers and hydraulic brakes to reduce damage from collisions and a footstep power generation system to capture typically wasted pedal energy and transform it into electrical energy using piezoelectric crystals. The applications are prevention of road accidents, reduced traffic and damage from accidents, and production of electricity.ROAD ACCIDENTS ppt.pptx
ROAD ACCIDENTS ppt.pptxAyushkumar30945
Мэ
The document outlines a project by Lucknow Public School aimed at preventing road accidents, highlighting the use of equipment such as toy cars, springs, syringes, and piezoelectric crystals. The project employs spring bumpers and hydraulic brakes to mitigate collision damage, while also harnessing footstep power generation to convert mechanical stress into electrical energy. The proposed applications include reducing accidents, traffic, car damage, and saving lives, along with electricity generation.FORENSIC PHYSICS
FORENSIC PHYSICSssuser1999081
Мэ
A forensic physicist can reconstruct accidents using physics principles. They analyze evidence like skid marks and vehicle damage to determine speeds and forces. The document defines key physics concepts and formulas used in accident reconstruction like momentum, kinetic energy, coefficients of friction, and Newton's laws of motion. It provides examples of how physicists calculate vehicle speeds from skid marks or crush depth. Conservation of energy and momentum principles are also explained for analyzing collision scenarios.Transient engine emissions and their impact on (very) local air quality - Mar...
Transient engine emissions and their impact on (very) local air quality - Mar...IES / IAQM
Мэ
This document discusses the challenges of measuring real-world driving emissions (RDE) due to short-duration transient spikes in pollution. Portable emissions measurement systems (PEMS) are too slow to accurately measure these spikes, with response times of seconds, while Cambustion emissions analyzers can respond within milliseconds. Fast-response analyzers were able to precisely measure hydrocarbon spikes during a cold start and capture individual cylinder exhaust events. Testing of vehicles in London identified specific speed bumps and traffic conditions as hot spots causing higher-than-limit nitrogen oxide emissions. Fast analyzers allow correlating transient emissions to engine parameters and identifying solutions.Spot speed study
Spot speed studyAmit Raj
Мэ
This document contains information from a traffic study conducted on a road connecting various departments at a university. The study found that:
1) The 85th percentile speed on the road was higher than the posted speed limit of 25 kmph, especially in the straight section in front of the Biotechnology department.
2) Bicycles made up the majority of vehicles on the road, with generally low traffic during the day.
3) Speed breakers were not fully effective in reducing speeds to the limit, and adding another breaker in front of the Biotechnology department was recommended.Real world Driving Emissions from diesel and petrol vehicles #COMIT2019
Real world Driving Emissions from diesel and petrol vehicles #COMIT2019Comit Projects Ltd
Мэ
The document discusses real-world driving emissions from diesel and petrol vehicles, highlighting the challenges in accurately measuring transient emissions during operations like cold starts and accelerations. It compares traditional Portable Emissions Measurement Systems (PEMS) to Cambustion's fast-response analyzers, which can capture emissions spikes significantly quicker. Additionally, it details specific factors affecting NOx emissions, including vehicle conditions and driving patterns, as well as challenges in after-treatment systems.solar car
solar carsantosh naik
Мэ
This document discusses in-wheel electric motors for vehicles. It describes how in-wheel motors work by using electromagnetic fields to directly drive each wheel. It provides an example of a Ford F-150 modified with four in-wheel motors capable of over 100 hp each. In-wheel motors offer high efficiency of around 90% by transmitting power directly from the motor to the wheel. However, in-wheel motors also have disadvantages like higher cost and exposed components. The document also provides calculations for determining the torque requirements of a drive wheel motor based on vehicle specifications. Finally, it discusses using H-bridge circuits to control DC motors and provides a program example.Final SARA Presentation
Final SARA PresentationDerrick Carrisalez
Мэ
The document describes the development of a site assessment widget and optimization models for low impact development best management practices (LID-BMPs). Key information includes:
- The widget will allow users to select a site on a GIS map, input rainfall data, and receive an optimal LID-BMP design report.
- Optimization models are described for sizing cisterns individually and in series (cistern trains) to minimize costs while meeting design constraints.
- Future work includes incorporating rainfall uncertainty analysis into the widget and developing an optimization model for bioretention cell sizing.Cost-optimization Algorithm Comparison for Fresh Crop Transportation in Sri L...
Cost-optimization Algorithm Comparison for Fresh Crop Transportation in Sri L...PabasaraMahindapala
Мэ
The document compares three optimization algorithms (genetic algorithm, ant colony optimization, and simulated annealing) for minimizing transportation costs in fresh crop delivery in Sri Lanka. The ant colony optimization yielded the lowest total transportation distance, while simulated annealing had the best computational time. Overall, ant colony optimization was deemed the most suitable method for the task.Decentraized solid waste management
Decentraized solid waste managementNisarg Shah
Мэ
The document presents a study on the feasibility of a decentralized solid waste management system. It discusses objectives like understanding current SWM models, developing and studying a decentralized model, and designing equipment like a vibrating screen. The methodology included literature review, site visits, and feasibility analysis. The functional elements of waste management are discussed. The document describes the design of equipment like a vibratoscope and vibrating screen for segregation. It includes diagrams and discusses processes like manual segregation and use of a hydraulic press. Matlab analysis is presented on the effect of the number of plants and landfill ratio on profit and payback period. The conclusion is that decentralized systems can be profitable if the landfill ratio is below 50%.лүҙмҠӨ м•Ө мҳ¬л””мҠӨ 2025л…„ 6мӣ”нҳё мҳӨн”„лӢқ мҶЎлҜјл № м „нҳңм • м „мІҙ мһҗлЈҢ.pdf
лүҙмҠӨ м•Ө мҳ¬л””мҠӨ 2025л…„ 6мӣ”нҳё мҳӨн”„лӢқ мҶЎлҜјл № м „нҳңм • м „мІҙ мһҗлЈҢ.pdfsciencepeople
Мэ
лүҙмҠӨ м•Ө мҳ¬л””мҠӨ 2025л…„ 6мӣ”нҳё мҳӨн”„лӢқ мҶЎлҜјл № м „нҳңм • м „мІҙ мһҗлЈҢ.pdfлі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 6б„Ӣб…ҜбҶҜб„’б…© нҷҚмҠ№мҲҳ к№Җнҳ•н•ң м•”нқ‘л¬јм§Ҳ нҶөн•©мһҗлЈҢ.pdf
лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 6б„Ӣб…ҜбҶҜб„’б…© нҷҚмҠ№мҲҳ к№Җнҳ•н•ң м•”нқ‘л¬јм§Ҳ нҶөн•©мһҗлЈҢ.pdfsciencepeople
Мэ
лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 6б„Ӣб…ҜбҶҜб„’б…© нҷҚмҠ№мҲҳ к№Җнҳ•н•ң м•”нқ‘л¬јм§Ҳ нҶөн•©мһҗлЈҢ.pdfMore Related Content
Similar to көҗнҶө мІҙмҰқмқҳ кіјн•ҷ.pptx (20)
Describing Motion 2012
Describing Motion 2012Stephen Taylor
Мэ
The document provides an introduction to describing motion through kinematics. It discusses key concepts such as scalars and vectors, distance and displacement, speed and velocity. It presents various methods for describing displacement including using components, magnitude and direction, and vector diagrams. The document also examines how to calculate speed and velocity from changes in distance or displacement over time. Graphs such as distance-time and velocity-time graphs are introduced as ways to represent motion. Students are encouraged to practice these concepts through activities such as an orienteering course and analyzing motion data.Traffic engineering macroscopic
Traffic engineering macroscopic ShaikhAtif12
Мэ
This document analyzes shockwave formation and propagation behind a slow moving truck. It contains the following key points:
1. A slow moving truck at 10 mph creates a shockwave that moves at the same speed (10 mph) in front of it, slowing traffic. A second shockwave forms behind it, moving at 2.1 mph, as traffic builds up in a platoon.
2. For a 10 minute period, the front of the platoon travels 1.67 miles while the rear travels 0.35 miles, extending the platoon to a maximum length of 1.32 miles containing 159 vehicles.
3. When the truck exits after 10 minutes, the platoon dissipates as the front shockwave now movesAutomatic transmission (torque converter)
Automatic transmission (torque converter)Cv raman college of engineering
Мэ
This document is a project report on automatic transmission systems submitted by Saswat DaS to his professors at C.V Raman Global University. It provides an overview of automatic transmissions, including their components like planetary gear sets, hydraulic systems, and computer controls. It describes different types of automatic transmissions like continuously variable transmission, dual clutch transmission, and torque converter transmission. It also discusses advantages like smooth shifting and disadvantages like higher costs compared to manual transmissions. The conclusion is that while manual transmissions have been around longer, automatic transmissions are eliminating the need for a clutch pedal and are the future of transmissions.Automatic side stand remover
Automatic side stand removerSaurav Sd
Мэ
The project presents a fully automatic self side stand removal system for two-wheelers aimed at preventing accidents caused by forgetting to remove the side stand. It addresses the limitations of previous methods such as buzzer and gear pedal systems, offering a more efficient mechanical solution that operates without dependency on moisture or power supply. The expected results indicate that this mechanical system is applicable and advantageous for two-wheelers, requiring minimal maintenance.TheGrafixCard
TheGrafixCardCitizens for Accountable Governance
Мэ
The Kidney-Spine Traffic Project proposes a unique traffic system consisting of a central island with twin kidney shapes and surrounding road lanes. Vehicles flow around the island using four elongated U-turns. Two special lanes in the center allow direct passage for highway users. This system aims to reduce traffic congestion, accidents, and travel times compared to traditional four-way intersections or flyovers by slowing traffic and reducing conflict points. The project team estimates the system could be built for 1 crore and would generate employment while reducing government road maintenance costs if implemented. Challenges include modifying existing infrastructure and ensuring orderly traffic flow, but signs, monitoring, and driver education could help address these.Lithium For Everything?
Lithium For Everything? Glenn Green
Мэ
The presentation by Glenn Austin Green discusses the importance of selecting the right battery chemistry for electric vehicle (EV) applications, focusing on the advantages and limitations of lithium-ion (Li-ion) and nickel metal hydride (NiMH) batteries. With over 17 years of experience, EVB Technology emphasizes real-world case studies to illustrate that performance can vary significantly based on operating environments and application needs. The document highlights the potential for reduced emissions and cost-effective solutions in specific applications, aiming to inform customer decisions based on their requirements.Traffic volume studies
Traffic volume studiesJanak Parmar
Мэ
Traffic volume studies collect data on the number of vehicles and pedestrians passing a point on a roadway over a period of time. This data is used for planning, design, and operations purposes. There are manual and automatic methods for conducting these studies. Manual methods involve human counters while automatic methods use sensors. The data collected is used to determine metrics like average daily traffic, peak hour volumes, and directional distribution which are then used for roadway design and traffic management.Design & Fabrication of Road Power Generator2
Design & Fabrication of Road Power Generator2Zulfiqar Ali
Мэ
This document describes the design and fabrication of a road power generator (RPG) by Zulfiqar Ali and their team. The RPG aims to capture wasted kinetic energy from vehicles to generate electricity. It works by using an activator plate that converts vehicle motion into rotational energy via a rack and pinion system. This energy is then amplified using pulleys and stored in a flywheel connected to a generator. The document outlines the working principle, methods used, contributions made in designing components like the activator plate, and calculations showing the RPG can generate around 1 kW of power per day. Challenges faced and advantages like being environmentally friendly and requiring no fuel are also discussed.Session 61 Robert Thomson
Session 61 Robert ThomsonRWThomson
Мэ
This document summarizes a project investigating ways to improve motorcycle safety on roads in Sweden. It finds that most single-vehicle motorcycle crashes occur on curves at speeds of 70-90 km/h. Testing of motorcycle riders' emergency maneuvers showed average response times of around 2 seconds, with responses slightly slower in curves. The project aims to determine safe distances between road edges and guardrails to allow motorcycles room to recover from errors. It also seeks to identify design improvements that keep motorcycles stable and upright to avoid collisions with roadside objects. Future work includes further studying needed recovery areas and integrating vehicle and infrastructure developments.Electricity generation using speed breaker
Electricity generation using speed breakerRaza Ishtiaq
Мэ
This document presents a project on 'Electricity Generation from Speed Breakers' aimed at harnessing the kinetic energy from vehicles passing over speed breakers to generate electrical power. It details the project team, acknowledgments, objectives, system design, materials required, testing, and troubleshooting processes involved in the development of the prototype. The project emphasizes the potential of utilizing renewable energy sources to address power shortages in light of conventional sources being depleting.ROAD ACCIDENTS ppt . xlx.pptx by Lps Eldeco
ROAD ACCIDENTS ppt . xlx.pptx by Lps Eldecoxaditya0099
Мэ
This document outlines a project to prevent road accidents. It introduces the growing problem of road accidents globally and the concepts and equipment used in the project. These include toy cars, springs, syringes and piezoelectric crystals. The project uses spring bumpers and hydraulic brakes to reduce damage from collisions and a footstep power generation system to capture typically wasted pedal energy and transform it into electrical energy using piezoelectric crystals. The applications are prevention of road accidents, reduced traffic and damage from accidents, and production of electricity.ROAD ACCIDENTS ppt.pptx
ROAD ACCIDENTS ppt.pptxAyushkumar30945
Мэ
The document outlines a project by Lucknow Public School aimed at preventing road accidents, highlighting the use of equipment such as toy cars, springs, syringes, and piezoelectric crystals. The project employs spring bumpers and hydraulic brakes to mitigate collision damage, while also harnessing footstep power generation to convert mechanical stress into electrical energy. The proposed applications include reducing accidents, traffic, car damage, and saving lives, along with electricity generation.FORENSIC PHYSICS
FORENSIC PHYSICSssuser1999081
Мэ
A forensic physicist can reconstruct accidents using physics principles. They analyze evidence like skid marks and vehicle damage to determine speeds and forces. The document defines key physics concepts and formulas used in accident reconstruction like momentum, kinetic energy, coefficients of friction, and Newton's laws of motion. It provides examples of how physicists calculate vehicle speeds from skid marks or crush depth. Conservation of energy and momentum principles are also explained for analyzing collision scenarios.Transient engine emissions and their impact on (very) local air quality - Mar...
Transient engine emissions and their impact on (very) local air quality - Mar...IES / IAQM
Мэ
This document discusses the challenges of measuring real-world driving emissions (RDE) due to short-duration transient spikes in pollution. Portable emissions measurement systems (PEMS) are too slow to accurately measure these spikes, with response times of seconds, while Cambustion emissions analyzers can respond within milliseconds. Fast-response analyzers were able to precisely measure hydrocarbon spikes during a cold start and capture individual cylinder exhaust events. Testing of vehicles in London identified specific speed bumps and traffic conditions as hot spots causing higher-than-limit nitrogen oxide emissions. Fast analyzers allow correlating transient emissions to engine parameters and identifying solutions.Spot speed study
Spot speed studyAmit Raj
Мэ
This document contains information from a traffic study conducted on a road connecting various departments at a university. The study found that:
1) The 85th percentile speed on the road was higher than the posted speed limit of 25 kmph, especially in the straight section in front of the Biotechnology department.
2) Bicycles made up the majority of vehicles on the road, with generally low traffic during the day.
3) Speed breakers were not fully effective in reducing speeds to the limit, and adding another breaker in front of the Biotechnology department was recommended.Real world Driving Emissions from diesel and petrol vehicles #COMIT2019
Real world Driving Emissions from diesel and petrol vehicles #COMIT2019Comit Projects Ltd
Мэ
The document discusses real-world driving emissions from diesel and petrol vehicles, highlighting the challenges in accurately measuring transient emissions during operations like cold starts and accelerations. It compares traditional Portable Emissions Measurement Systems (PEMS) to Cambustion's fast-response analyzers, which can capture emissions spikes significantly quicker. Additionally, it details specific factors affecting NOx emissions, including vehicle conditions and driving patterns, as well as challenges in after-treatment systems.solar car
solar carsantosh naik
Мэ
This document discusses in-wheel electric motors for vehicles. It describes how in-wheel motors work by using electromagnetic fields to directly drive each wheel. It provides an example of a Ford F-150 modified with four in-wheel motors capable of over 100 hp each. In-wheel motors offer high efficiency of around 90% by transmitting power directly from the motor to the wheel. However, in-wheel motors also have disadvantages like higher cost and exposed components. The document also provides calculations for determining the torque requirements of a drive wheel motor based on vehicle specifications. Finally, it discusses using H-bridge circuits to control DC motors and provides a program example.Final SARA Presentation
Final SARA PresentationDerrick Carrisalez
Мэ
The document describes the development of a site assessment widget and optimization models for low impact development best management practices (LID-BMPs). Key information includes:
- The widget will allow users to select a site on a GIS map, input rainfall data, and receive an optimal LID-BMP design report.
- Optimization models are described for sizing cisterns individually and in series (cistern trains) to minimize costs while meeting design constraints.
- Future work includes incorporating rainfall uncertainty analysis into the widget and developing an optimization model for bioretention cell sizing.Cost-optimization Algorithm Comparison for Fresh Crop Transportation in Sri L...
Cost-optimization Algorithm Comparison for Fresh Crop Transportation in Sri L...PabasaraMahindapala
Мэ
The document compares three optimization algorithms (genetic algorithm, ant colony optimization, and simulated annealing) for minimizing transportation costs in fresh crop delivery in Sri Lanka. The ant colony optimization yielded the lowest total transportation distance, while simulated annealing had the best computational time. Overall, ant colony optimization was deemed the most suitable method for the task.Decentraized solid waste management
Decentraized solid waste managementNisarg Shah
Мэ
The document presents a study on the feasibility of a decentralized solid waste management system. It discusses objectives like understanding current SWM models, developing and studying a decentralized model, and designing equipment like a vibrating screen. The methodology included literature review, site visits, and feasibility analysis. The functional elements of waste management are discussed. The document describes the design of equipment like a vibratoscope and vibrating screen for segregation. It includes diagrams and discusses processes like manual segregation and use of a hydraulic press. Matlab analysis is presented on the effect of the number of plants and landfill ratio on profit and payback period. The conclusion is that decentralized systems can be profitable if the landfill ratio is below 50%.Cost-optimization Algorithm Comparison for Fresh Crop Transportation in Sri L...
Cost-optimization Algorithm Comparison for Fresh Crop Transportation in Sri L...PabasaraMahindapala
Мэ
More from sciencepeople (20)
лүҙмҠӨ м•Ө мҳ¬л””мҠӨ 2025л…„ 6мӣ”нҳё мҳӨн”„лӢқ мҶЎлҜјл № м „нҳңм • м „мІҙ мһҗлЈҢ.pdf
лүҙмҠӨ м•Ө мҳ¬л””мҠӨ 2025л…„ 6мӣ”нҳё мҳӨн”„лӢқ мҶЎлҜјл № м „нҳңм • м „мІҙ мһҗлЈҢ.pdfsciencepeople
Мэ
лүҙмҠӨ м•Ө мҳ¬л””мҠӨ 2025л…„ 6мӣ”нҳё мҳӨн”„лӢқ мҶЎлҜјл № м „нҳңм • м „мІҙ мһҗлЈҢ.pdfлі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 6б„Ӣб…ҜбҶҜб„’б…© нҷҚмҠ№мҲҳ к№Җнҳ•н•ң м•”нқ‘л¬јм§Ҳ нҶөн•©мһҗлЈҢ.pdf
лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 6б„Ӣб…ҜбҶҜб„’б…© нҷҚмҠ№мҲҳ к№Җнҳ•н•ң м•”нқ‘л¬јм§Ҳ нҶөн•©мһҗлЈҢ.pdfsciencepeople
Мэ
лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 6б„Ӣб…ҜбҶҜб„’б…© нҷҚмҠ№мҲҳ к№Җнҳ•н•ң м•”нқ‘л¬јм§Ҳ нҶөн•©мһҗлЈҢ.pdfб„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і2025 5б„Ӣб…ҜбҶҜб„’б…© мқҙмҡ© мң л§Ңм„ нҶөн•© б„Ңб…Ўб„…б…ӯ.pdf
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і2025 5б„Ӣб…ҜбҶҜб„’б…© мқҙмҡ© мң л§Ңм„ нҶөн•© б„Ңб…Ўб„…б…ӯ.pdfsciencepeople
Мэ
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і2025 5б„Ӣб…ҜбҶҜб„’б…© мқҙмҡ© мң л§Ңм„ нҶөн•© б„Ңб…Ўб„…б…ӯ.pdfлүҙмҠӨм•Өмҳ¬л””мҠӨ 2025л…„ 5мӣ”нҳё. мҳӨлЎңлқјм—¬н–ү, мҳӨн”„лӢқ, б„’б…Әб„Ңб…ЎбҶјб„‘б…®бҶ·б„Ӣб…ҙ б„Ӣб…§бҶЁб„үб…Ў мһҗлЈҢ
лүҙмҠӨм•Өмҳ¬л””мҠӨ 2025л…„ 5мӣ”нҳё. мҳӨлЎңлқјм—¬н–ү, мҳӨн”„лӢқ, б„’б…Әб„Ңб…ЎбҶјб„‘б…®бҶ·б„Ӣб…ҙ б„Ӣб…§бҶЁб„үб…Ў мһҗлЈҢsciencepeople
Мэ
лүҙмҠӨм•Өмҳ¬л””мҠӨ 2025л…„ 5мӣ”нҳё. мҳӨлЎңлқјм—¬н–ү, мҳӨн”„лӢқ, б„’б…Әб„Ңб…ЎбҶјб„‘б…®бҶ·б„Ӣб…ҙ б„Ӣб…§бҶЁб„үб…Ў мһҗлЈҢлі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 5мӣ”нҳё м „нғңнҷҳ л°•мӮ¬ нҷҚмҠ№мҲҳ л°•мӮ¬ к°•мқҳ м „мІҙ мһҗлЈҢ
лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 5мӣ”нҳё м „нғңнҷҳ л°•мӮ¬ нҷҚмҠ№мҲҳ л°•мӮ¬ к°•мқҳ м „мІҙ мһҗлЈҢsciencepeople
Мэ
лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 5мӣ”нҳё м „нғңнҷҳ л°•мӮ¬, нҷҚмҠ№мҲҳ л°•мӮ¬ к°•мқҳ м „мІҙ мһҗлЈҢб„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 4б„Ӣб…ҜбҶҜб„’б…© мқҙмҡ© K2 м „мІҙмһҗлЈҢ.pdf
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 4б„Ӣб…ҜбҶҜб„’б…© мқҙмҡ© K2 м „мІҙмһҗлЈҢ.pdfsciencepeople
Мэ
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 4б„Ӣб…ҜбҶҜб„’б…© мқҙмҡ© K2 м „мІҙмһҗлЈҢ.pdfб„Ӯб…ІмҠӨм•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 4б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • м „мІҙ мһҗлЈҢ.pdf
б„Ӯб…ІмҠӨм•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 4б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • м „мІҙ мһҗлЈҢ.pdfsciencepeople
Мэ
б„Ӯб…ІмҠӨм•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 4б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • м „мІҙ мһҗлЈҢб„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ« б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2025л…„ 4б„Ӣб…ҜбҶҜб„’б…© м „мІҙ мһҗлЈҢ.pdf
б„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ« б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2025л…„ 4б„Ӣб…ҜбҶҜб„’б…© м „мІҙ мһҗлЈҢ.pdfsciencepeople
Мэ
б„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ« б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2025л…„ 4б„Ӣб…ҜбҶҜб„’б…© м „мІҙ мһҗлЈҢ.pdfб„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 3б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ мқҙмҡ© K2 м „мІҙмһҗлЈҢ.pdf
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 3б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ мқҙмҡ© K2 м „мІҙмһҗлЈҢ.pdfsciencepeople
Мэ
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 3б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ мқҙмҡ© K2 м „мІҙмһҗлЈҢ.pdfб„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 3б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм •.pdf
б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 3б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм •.pdfsciencepeople
Мэ
б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 3б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм •.pdfкіјн•ҷн•ҳкі м•үм•„мһҲл„Ө б„Үб…§бҶҜн—ӨлҠ” б„үб…ЎлһҢл“Ө 2025л…„ 03б„Ӣб…ҜбҶҜб„’б…© м „мІҙ мһҗлЈҢ.pdf
кіјн•ҷн•ҳкі м•үм•„мһҲл„Ө б„Үб…§бҶҜн—ӨлҠ” б„үб…ЎлһҢл“Ө 2025л…„ 03б„Ӣб…ҜбҶҜб„’б…© м „мІҙ мһҗлЈҢ.pdfsciencepeople
Мэ
кіјн•ҷн•ҳкі м•үм•„мһҲл„Ө б„Үб…§бҶҜн—ӨлҠ” б„үб…ЎлһҢл“Ө 2025л…„ 03б„Ӣб…ҜбҶҜб„’б…© м „мІҙ мһҗлЈҢ.pdfб„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 2б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ мқҙмҡ© K2 нҶөн•©мһҗлЈҢ.pdf
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 2б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ мқҙмҡ© K2 нҶөн•©мһҗлЈҢ.pdfsciencepeople
Мэ
мҳ¬лүҙ мӮјн…Ңм„ұмҰҲ! 2025л…„ 2мӣ”нҳё. л“ңлЎ мқҙ л°”кҫёлҠ” м „мһҘ, к·ёлҰ¬кі мҶҢлӢү л¶җмқҳ мӣҗлҰ¬мҷҖ м ңкұ°н•ҳлҠ” кё°мҲ мқҳ л“ұмһҘ!б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 02мӣ”нҳё мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • кіөнҶөмһҗлЈҢ.pdf
б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 02мӣ”нҳё мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • кіөнҶөмһҗлЈҢ.pdfsciencepeople
Мэ
б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 02мӣ”нҳё мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • кіөнҶөмһҗлЈҢ.pdfкіјн•ҷн•ҳкі м•үм•„мһҲл„Ө лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 2мӣ”нҳё мң мһ¬мӣҗ нҷҚмҠ№мҲҳ м „мІҙ нҶөн•©мһҗлЈҢ.pdf
кіјн•ҷн•ҳкі м•үм•„мһҲл„Ө лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 2мӣ”нҳё мң мһ¬мӣҗ нҷҚмҠ№мҲҳ м „мІҙ нҶөн•©мһҗлЈҢ.pdfsciencepeople
Мэ
кіјн•ҷн•ҳкі м•үм•„мһҲл„Ө лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 2мӣ”нҳё мң мһ¬мӣҗ нҷҚмҠ№мҲҳ м „мІҙ нҶөн•©мһҗлЈҢ.pdfмҳ¬лүҙ б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2024б„Ӯб…§бҶ« 12б„Ӣб…ҜбҶҜб„’б…© нҶөн•© б„Ңб…Ўб„…б…ӯ.pdf
мҳ¬лүҙ б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2024б„Ӯб…§бҶ« 12б„Ӣб…ҜбҶҜб„’б…© нҶөн•© б„Ңб…Ўб„…б…ӯ.pdfsciencepeople
Мэ
мҳ¬лүҙ б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2024б„Ӯб…§бҶ« 12б„Ӣб…ҜбҶҜб„’б…© нҶөн•© б„Ңб…Ўб„…б…ӯ.pdfб„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2024л…„ 12б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • м „мІҙ мһҗлЈҢ.pdf
б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2024л…„ 12б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • м „мІҙ мһҗлЈҢ.pdfsciencepeople
Мэ
б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2024л…„ 12б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • м „мІҙ мһҗлЈҢ.pdfб„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ« б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2024б„Ӯб…§бҶ« 12б„Ӣб…ҜбҶҜб„’б…© мһҗлЈҢ.pdf
б„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ« б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2024б„Ӯб…§бҶ« 12б„Ӣб…ҜбҶҜб„’б…© мһҗлЈҢ.pdfsciencepeople
Мэ
б„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ« б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2024б„Ӯб…§бҶ« 12б„Ӣб…ҜбҶҜб„’б…© мһҗлЈҢ.pdfб„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2024б„Ӯб…§бҶ« 11б„Ӣб…ҜбҶҜб„’б…© м „мІҙ нҶөн•© б„Ңб…Ўб„…б…ӯ.pdf
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2024б„Ӯб…§бҶ« 11б„Ӣб…ҜбҶҜб„’б…© м „мІҙ нҶөн•© б„Ңб…Ўб„…б…ӯ.pdfsciencepeople
Мэ
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2024б„Ӯб…§бҶ« 11б„Ӣб…ҜбҶҜб„’б…© м „мІҙ нҶөн•© б„Ңб…Ўб„…б…ӯ.pdfб„Ӯб…ІмҠӨм•Өб„Ӣб…©бҶҜл””мҠӨ 2024л…„ 11б„Ӣб…ҜбҶҜб„’б…©. лҳ‘лҳ‘н•ң кі м–‘мқҙмҷҖ мӮ¬нҳҲмҡ”лІ•.pdf
б„Ӯб…ІмҠӨм•Өб„Ӣб…©бҶҜл””мҠӨ 2024л…„ 11б„Ӣб…ҜбҶҜб„’б…©. лҳ‘лҳ‘н•ң кі м–‘мқҙмҷҖ мӮ¬нҳҲмҡ”лІ•.pdfsciencepeople
Мэ
б„Ӯб…ІмҠӨм•Өб„Ӣб…©бҶҜл””мҠӨ 2024л…„ 11б„Ӣб…ҜбҶҜб„’б…©. лҳ‘лҳ‘н•ң кі м–‘мқҙмҷҖ мӮ¬нҳҲмҡ”лІ•.pdfб„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ«б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2024б„Ӯб…§бҶ« 11б„Ӣб…ҜбҶҜб„’б…© м „мІҙмһҗлЈҢ.pdf
б„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ«б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2024б„Ӯб…§бҶ« 11б„Ӣб…ҜбҶҜб„’б…© м „мІҙмһҗлЈҢ.pdfsciencepeople
Мэ
б„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ«б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2024б„Ӯб…§бҶ« 11б„Ӣб…ҜбҶҜб„’б…© м „мІҙмһҗлЈҢ.pdfлі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 6б„Ӣб…ҜбҶҜб„’б…© нҷҚмҠ№мҲҳ к№Җнҳ•н•ң м•”нқ‘л¬јм§Ҳ нҶөн•©мһҗлЈҢ.pdf
лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 6б„Ӣб…ҜбҶҜб„’б…© нҷҚмҠ№мҲҳ к№Җнҳ•н•ң м•”нқ‘л¬јм§Ҳ нҶөн•©мһҗлЈҢ.pdfsciencepeople
Мэ
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і2025 5б„Ӣб…ҜбҶҜб„’б…© мқҙмҡ© мң л§Ңм„ нҶөн•© б„Ңб…Ўб„…б…ӯ.pdf
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і2025 5б„Ӣб…ҜбҶҜб„’б…© мқҙмҡ© мң л§Ңм„ нҶөн•© б„Ңб…Ўб„…б…ӯ.pdfsciencepeople
Мэ
лүҙмҠӨм•Өмҳ¬л””мҠӨ 2025л…„ 5мӣ”нҳё. мҳӨлЎңлқјм—¬н–ү, мҳӨн”„лӢқ, б„’б…Әб„Ңб…ЎбҶјб„‘б…®бҶ·б„Ӣб…ҙ б„Ӣб…§бҶЁб„үб…Ў мһҗлЈҢ
лүҙмҠӨм•Өмҳ¬л””мҠӨ 2025л…„ 5мӣ”нҳё. мҳӨлЎңлқјм—¬н–ү, мҳӨн”„лӢқ, б„’б…Әб„Ңб…ЎбҶјб„‘б…®бҶ·б„Ӣб…ҙ б„Ӣб…§бҶЁб„үб…Ў мһҗлЈҢsciencepeople
Мэ
лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 5мӣ”нҳё м „нғңнҷҳ л°•мӮ¬ нҷҚмҠ№мҲҳ л°•мӮ¬ к°•мқҳ м „мІҙ мһҗлЈҢ
лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 5мӣ”нҳё м „нғңнҷҳ л°•мӮ¬ нҷҚмҠ№мҲҳ л°•мӮ¬ к°•мқҳ м „мІҙ мһҗлЈҢsciencepeople
Мэ
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 4б„Ӣб…ҜбҶҜб„’б…© мқҙмҡ© K2 м „мІҙмһҗлЈҢ.pdf
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 4б„Ӣб…ҜбҶҜб„’б…© мқҙмҡ© K2 м „мІҙмһҗлЈҢ.pdfsciencepeople
Мэ
б„Ӯб…ІмҠӨм•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 4б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • м „мІҙ мһҗлЈҢ.pdf
б„Ӯб…ІмҠӨм•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 4б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • м „мІҙ мһҗлЈҢ.pdfsciencepeople
Мэ
б„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ« б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2025л…„ 4б„Ӣб…ҜбҶҜб„’б…© м „мІҙ мһҗлЈҢ.pdf
б„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ« б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2025л…„ 4б„Ӣб…ҜбҶҜб„’б…© м „мІҙ мһҗлЈҢ.pdfsciencepeople
Мэ
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 3б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ мқҙмҡ© K2 м „мІҙмһҗлЈҢ.pdf
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 3б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ мқҙмҡ© K2 м „мІҙмһҗлЈҢ.pdfsciencepeople
Мэ
б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 3б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм •.pdf
б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 3б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм •.pdfsciencepeople
Мэ
кіјн•ҷн•ҳкі м•үм•„мһҲл„Ө б„Үб…§бҶҜн—ӨлҠ” б„үб…ЎлһҢл“Ө 2025л…„ 03б„Ӣб…ҜбҶҜб„’б…© м „мІҙ мһҗлЈҢ.pdf
кіјн•ҷн•ҳкі м•үм•„мһҲл„Ө б„Үб…§бҶҜн—ӨлҠ” б„үб…ЎлһҢл“Ө 2025л…„ 03б„Ӣб…ҜбҶҜб„’б…© м „мІҙ мһҗлЈҢ.pdfsciencepeople
Мэ
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 2б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ мқҙмҡ© K2 нҶөн•©мһҗлЈҢ.pdf
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2025б„Ӯб…§бҶ« 2б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ мқҙмҡ© K2 нҶөн•©мһҗлЈҢ.pdfsciencepeople
Мэ
б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 02мӣ”нҳё мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • кіөнҶөмһҗлЈҢ.pdf
б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2025л…„ 02мӣ”нҳё мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • кіөнҶөмһҗлЈҢ.pdfsciencepeople
Мэ
кіјн•ҷн•ҳкі м•үм•„мһҲл„Ө лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 2мӣ”нҳё мң мһ¬мӣҗ нҷҚмҠ№мҲҳ м „мІҙ нҶөн•©мһҗлЈҢ.pdf
кіјн•ҷн•ҳкі м•үм•„мһҲл„Ө лі„н—ӨлҠ” мӮ¬лһҢл“Ө 2025л…„ 2мӣ”нҳё мң мһ¬мӣҗ нҷҚмҠ№мҲҳ м „мІҙ нҶөн•©мһҗлЈҢ.pdfsciencepeople
Мэ
мҳ¬лүҙ б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2024б„Ӯб…§бҶ« 12б„Ӣб…ҜбҶҜб„’б…© нҶөн•© б„Ңб…Ўб„…б…ӯ.pdf
мҳ¬лүҙ б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2024б„Ӯб…§бҶ« 12б„Ӣб…ҜбҶҜб„’б…© нҶөн•© б„Ңб…Ўб„…б…ӯ.pdfsciencepeople
Мэ
б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2024л…„ 12б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • м „мІҙ мһҗлЈҢ.pdf
б„Ӯб…ІмҠӨ м•Ө б„Ӣб…©бҶҜл””мҠӨ 2024л…„ 12б„Ӣб…ҜбҶҜб„’б…© мҳӨн”„лӢқ м•ҲмЈјнҳ„ м „нҳңм • м „мІҙ мһҗлЈҢ.pdfsciencepeople
Мэ
б„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ« б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2024б„Ӯб…§бҶ« 12б„Ӣб…ҜбҶҜб„’б…© мһҗлЈҢ.pdf
б„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ« б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2024б„Ӯб…§бҶ« 12б„Ӣб…ҜбҶҜб„’б…© мһҗлЈҢ.pdfsciencepeople
Мэ
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2024б„Ӯб…§бҶ« 11б„Ӣб…ҜбҶҜб„’б…© м „мІҙ нҶөн•© б„Ңб…Ўб„…б…ӯ.pdf
б„үб…ЎбҶ·б„җб…Ұб„үб…ҘбҶјб„Ңб…і 2024б„Ӯб…§бҶ« 11б„Ӣб…ҜбҶҜб„’б…© м „мІҙ нҶөн•© б„Ңб…Ўб„…б…ӯ.pdfsciencepeople
Мэ
б„Ӯб…ІмҠӨм•Өб„Ӣб…©бҶҜл””мҠӨ 2024л…„ 11б„Ӣб…ҜбҶҜб„’б…©. лҳ‘лҳ‘н•ң кі м–‘мқҙмҷҖ мӮ¬нҳҲмҡ”лІ•.pdf
б„Ӯб…ІмҠӨм•Өб„Ӣб…©бҶҜл””мҠӨ 2024л…„ 11б„Ӣб…ҜбҶҜб„’б…©. лҳ‘лҳ‘н•ң кі м–‘мқҙмҷҖ мӮ¬нҳҲмҡ”лІ•.pdfsciencepeople
Мэ
б„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ«б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2024б„Ӯб…§бҶ« 11б„Ӣб…ҜбҶҜб„’б…© м „мІҙмһҗлЈҢ.pdf
б„Үб…§бҶҜб„’б…Ұб„Ӯб…ібҶ«б„үб…Ўб„…б…ЎбҶ·б„ғб…ібҶҜ 2024б„Ӯб…§бҶ« 11б„Ӣб…ҜбҶҜб„’б…© м „мІҙмһҗлЈҢ.pdfsciencepeople
Мэ
Ad
Recently uploaded (20)
How Psychology Can Power Product Decisions: A Human-Centered Blueprint- Shray...
How Psychology Can Power Product Decisions: A Human-Centered Blueprint- Shray...ShrayasiRoy2
Мэ
In an era where users are bombarded with endless choices, capturing attention and driving meaningful engagement isn't just about building features вҖ” it's about understanding what drives human behavior at its core. This presentation offers a deep dive into how psychological principles can inform smarter, more intuitive product decisions. ItвҖҷs not just theory вҖ” itвҖҷs a hands-on blueprint for applying human-centered thinking at every stage of product development.
Grounded in behavioral science, consumer psychology, and cognitive design, this deck unpacks the key psychological drivers behind user motivation, decision-making, emotional engagement, and habit formation. From attention economics and dopamine-driven interactions to trust cues, loss aversion, and the paradox of choice вҖ” you'll see how to harness what the mind naturally does to build digital products people donвҖҷt just useвҖҰ they return to, talk about, and even advocate for.
WeвҖҷll explore:
Cognitive biases that shape user perception and choices вҖ” and how to use them to your advantage without crossing ethical lines.
Emotional design principles that build trust, trigger desire, and turn features into feelings.
User behavior loops that build stickiness, deepen retention, and create emotional investments.
Psychological friction вҖ” when to reduce it for conversion, and when to add it for intentionality.
Dark patterns vs. ethical persuasion вҖ” the thin line between influence and manipulation.
A/B testing with a psychological lens вҖ” learning not just what works, but why it works.
This is more than UX research or product marketing fluff. ItвҖҷs a call to build with empathy, backed by science, and sharpened by real-world product thinking. Whether youвҖҷre shaping onboarding flows, gamifying engagement, designing pricing models, or rethinking retention strategies вҖ” this deck will arm you with a new lens: the human mind.
Perfect for product managers, growth strategists, UX designers, behavioral scientists, and anyone serious about building products that resonate, retain, and inspire action.
Because at the heart of every great productвҖҰ is a human.
LetвҖҷs start building for the brain вҖ” not just the screen.Operationalising OGC Processes with Application Packages in ILIAD: A Service ...
Operationalising OGC Processes with Application Packages in ILIAD: A Service ...Marco Amaro Oliveira
Мэ
This contribution presents the integration of the EO Application Package model into the ILIAD Digital Twin of the Ocean architecture, using the OGC API Processes DRU specification. Built on the EOEPCA framework and OGC best practices and specifications, the approach enables standardized, containerized EO applications packaged with CWL to run across a wide range of infrastructures including Kubernetes and HPC. These applications are already in use across several platforms, and in ILIAD they have been applied to models such as oil spill forecasting, aquaculture, wave energy, and ship routing.
The EDITO platform supports OGC API Processes but is currently optimized for simpler workflows using environment variables. To enhance compatibility with EO Application Packages, ILIAD introduces a Kubernetes-based ADES implementation, enabling dynamic execution and integration with EDITO's object store and metadata catalog. The experience is also informing the evolution of the OGC Best Practice, and practical solutions for bridging architectural gaps will be discussed.Role of Glutamate, glutamine and Alanine in Transport of Ammonia in Tissues
Role of Glutamate, glutamine and Alanine in Transport of Ammonia in TissuesTayyab
Мэ
This slide explains the roles of Glutamate, Glutamine, and Alanine in safely transporting toxic ammonia from tissues to the liver and kidneys, where it is detoxified or excreted."THE CIRCULATORY SYSTEM GRADE 9 SCIENCE.pptx
THE CIRCULATORY SYSTEM GRADE 9 SCIENCE.pptxroselyncatacutan
Мэ
The Circulatory System Grade 9 Science Quarter 1 Week 1Cloud Collaboration Market Challenges, Drivers, Trends, and Forecast by 2031
Cloud Collaboration Market Challenges, Drivers, Trends, and Forecast by 2031moresonali406
Мэ
The report is segmented by Component (Solution, Service); Deployment (Private Cloud, Public Cloud, Hybrid Cloud); Organization Size (Large Enterprises, Small and Medium Enterprises (SMEs)); Vertical (BFSI, Consumer Goods And Retail, Education, Government and Public Sector, Healthcare and Life Sciences, Manufacturing, Media and Entertainment, Telecommunication and ITES, Others). The global analysis is further broken-down at regional level and major countries. The report offers the value in USD for the above analysis and segmentsDeath in Sleep Apnea: Who and How It Kills
Death in Sleep Apnea: Who and How It KillsRichard Castriotta
Мэ
Evaluation of mortality in obstructive sleep apnea.Synthesis and characterization of Thiazole derivatives of N-substituted lsatin
Synthesis and characterization of Thiazole derivatives of N-substituted lsatinProfessional Content Writing's
Мэ
Thiazole derivatives of N-substituted isatin have attracted significant interest due to their wide-ranging applications in medicinal chemistry, pharmaceuticals, and materials science. These compounds exhibit diverse biological activities, making them promising drug candidates, while their unique chemical structures offer potential in designing advanced functional materials. This presentation focuses on the synthesis and characterization of these derivatives through targeted chemical reactions involving various substituents on the isatin and thiazole cores, enabling the fine-tuning of their biological and physical properties. Characterization techniques such as NMR, FT-IR, Mass Spectrometry, and X-ray crystallography are employed to confirm molecular structures and analyze solid-state properties. These methods provide critical insights into the structureвҖ“activity relationships of the synthesized compounds. Our presentation highlights the synthetic pathways, structural elucidation, and potential applications of thiazole-based N-substituted isatin derivatives, aiming to support ongoing advancements in drug discovery and material development.
About Author:
Noor Zulfiqar is an award-winning chemist, Premium member of American Chemical Society (ACS), certified publisher & peer reviewer, and an experienced academic lecturer. As a professional content creator, she offers top-tier presentation design, research writing, and scientific content development services. Her multidisciplinary expertise spans computational science, chemistry, nanotechnology, environmental studies, socio-economics, human resource management, life sciences, engineering management, medical and pharmaceutical sciences, and business, her work ensures clarity, creativity, and academic excellence. Her services are ideal for those seeking impactful, visually compelling content tailored to diverse academic and research needs.
For collaborations or custom-designed academic content, feel free to reach out!
Contact:
Email: professionalwriter94@outlook.com
Facebook: https://www.facebook.com/share/1LgwpoyLDg/
Website: https://professional-content-writings.jimdosite.comThe Emergence of Signatures of AGI: The Physics of Learning
The Emergence of Signatures of AGI: The Physics of LearningCharles Martin
Мэ
A talk for the Cybernetic Society
GBSN_ Unit 1 - Introduction to Microbiology
GBSN_ Unit 1 - Introduction to MicrobiologyAreesha Ahmad
Мэ
Microbiology for Nursing students - According to New PNC course curriculum - 2025International Journal of Pharmacological Sciences (IJPS)
International Journal of Pharmacological Sciences (IJPS)journalijps98
Мэ
Call for Research Articles.!!!
FREE PUBLICATION CHARGES
International Journal of Pharmacological Sciences (IJPS)
Webpage URL : https://www.wireilla.com/medical/IJPS/index.html
Wikicfp Url:http://www.wikicfp.com/cfp/servlet/event.showcfp?eventid=181292©ownerid=33993
Authors are invited to submit papers through the Journal Submission System
http://allcfps.com/wireilla/submission/index.php
Submission Deadline : June 17, 2025
Contact Us
Here's where you can reach us : journalijps98@gmail.com or ijpsjournal@wireilla.comPneumonia Presentation for CPG Review and Mastery
Pneumonia Presentation for CPG Review and MasteryJayricDepalobos
Мэ
Pneumonia Presentation for Internal Medicine DepartmentOperationalising OGC Processes with Application Packages in ILIAD: A Service ...
Operationalising OGC Processes with Application Packages in ILIAD: A Service ...Marco Amaro Oliveira
Мэ
Synthesis and characterization of Thiazole derivatives of N-substituted lsatin
Synthesis and characterization of Thiazole derivatives of N-substituted lsatinProfessional Content Writing's
Мэ
Ad
көҗнҶө мІҙмҰқмқҳ кіјн•ҷ.pptx
- 1. Local interaction and traffic jam Beom Jun Kim (Dept. of Physics, Sungkyunkwan Univ., Korea)
- 2. Traffic problem вҖў In L.A., each car driver spends 56 hours in traffic jam per year. вҖў In Germany, opportunity cost caused by traffic jam sums up 100,000,000 US dollars per year. вҖў Environmental effect (global warming, air pollution, ...) is a big
- 3. Easy solution вҖў Build more roads !! вҖў Road area вүҲ % of city area in Seoul (2005). Build more??? вҖў Highway construction costs USD per km in Korea. Build more?? вҖў LetвҖҷs walk and bike !! вҖў I will not be here with you now. 22 20 million No
- 4. What causes the jam? вҖў Ant circle вҖў AntвҖҷs traffic rule: follow your friend and go astray a bit sometime. If you find food, bring it home, and let your friend know (leave pheromone behind). вҖў No food, only pheromone вҮ’ great circle of ants вҮ’ all die. вҖў We humans are much smarter than ants. So..
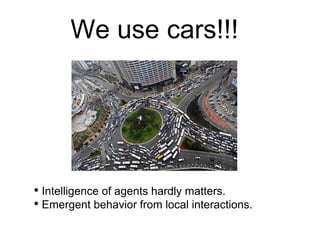
- 5. We use cars!!! вҖў Intelligence of agents hardly matters. вҖў Emergent behavior from local interactions.
- 6. Why traffic jam occurs? вҖў Traffic jam can occur without extrinsic inhomogeneity.
- 7. Model вҖў H. K. Lee et. al., PRL 92, 238702 (2004). вҖў Mechanical restriction: Acceleration and deceleration capabilities are limited. вҖў Human overreaction: DriverвҖҷs excessive response to the local traffic conditions.
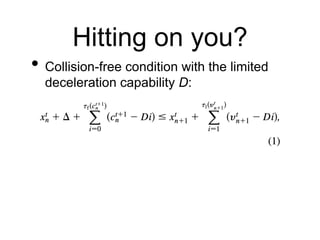
- 8. Hitting on you? вҖў Collision-free condition with the limited deceleration capability D:
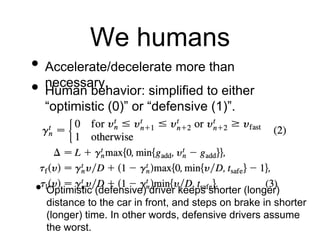
- 9. We humans вҖў Accelerate/decelerate more than necessary. вҖў Human behavior: simplified to either вҖңoptimistic (0)вҖқ or вҖңdefensive (1)вҖқ. вҖў Optimistic (defensive) driver keeps shorter (longer) distance to the car in front, and steps on brake in shorter (longer) time. In other words, defensive drivers assume the worst.
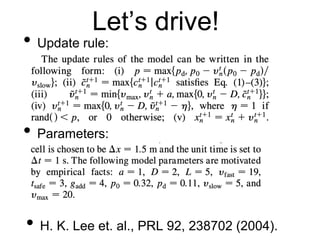
- 10. LetвҖҷs drive! вҖў Update rule: вҖў Parameters: вҖў H. K. Lee et. al., PRL 92, 238702 (2004).
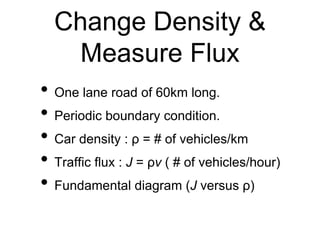
- 11. Change Density & Measure Flux вҖў One lane road of 60km long. вҖў Periodic boundary condition. вҖў Car density : ПҒ = # of vehicles/km вҖў Traffic flux : J = ПҒv ( # of vehicles/hour) вҖў Fundamental diagram (J versus ПҒ)
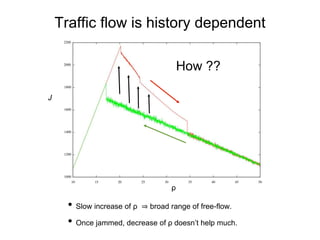
- 12. Traffic flow is history dependent вҖў Slow increase of ПҒ вҮ’ broad range of free-flow. вҖў Once jammed, decrease of ПҒ doesnвҖҷt help much. ПҒ J How ??
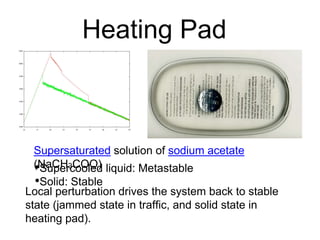
- 13. Heating Pad Supersaturated solution of sodium acetate (NaCH3COO) вҖўSupercooled liquid: Metastable вҖўSolid: Stable Local perturbation drives the system back to stable state (jammed state in traffic, and solid state in heating pad).
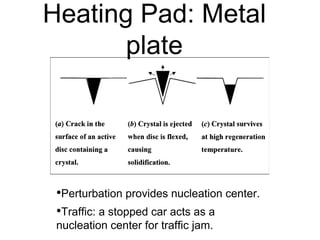
- 14. Heating Pad: Metal plate вҖўPerturbation provides nucleation center. вҖўTraffic: a stopped car acts as a nucleation center for traffic jam.
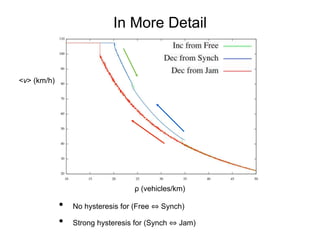
- 17. In More Detail ПҒ (vehicles/km) <v> (km/h) вҖў No hysteresis for (Free вҮ” Synch) вҖў Strong hysteresis for (Synch вҮ” Jam)
- 18. Iron-fist solution 1.Monitor the change of ПҒ. 2.If ПҒ is about to exceed ~34 veh/km, block all the highway entrances. 3.ПҒ decreases below some value (e.g., 25 veh/km). 4.Open the gate, and keep watching! вҖў I will be happy to be the last one entering, but hate to be the first one being stopped. вҖў Game theoretic situation; Nash
- 19. Statistical Physics Way of Thinking вҖў Jam is due to interactions. вҖў Un-jamming can be done by additional local interactions. But How? вҖў In the present model, alter the human factor (optimistic/defensive), avoiding the overreaction.
- 20. Autonomous Cruise Control вҖў Gather local traffic information. вҖў Change driving pattern in a smart way. But what is smart way? вҖў In the present model, alter the human factor (optimistic/defensive), avoiding the overreaction.
- 21. DonвҖҷt overreact, and stay calm. A. Downstream jam (you are approaching the jam): YouвҖҷd better be cautious. Otherwise, you will brake suddenly, making your follower surprised (and she will make her follower surprised too). B. Upstream jam (you are leaving the jam): YouвҖҷd better be optimistic (or speed up) so that your follower can leave the jam earlier (and her follower too). вҖў I tried both but only A was found to work: Be prepared for the future, and donвҖҷt be too happy after you suffer from misery.
- 22. Watch out downstream jam! вҖў If the n-th car in front of you has speed smaller than vc, youвҖҷd better be careful ( ). вҖў Tuning of x and n to maximize <v>: вҖў The value of n doesnвҖҷt matter much (10 вүӨ n вүӨ 30). вҖў The best value of vc = 8 in the simulation unit (вүғ 43.2km/h) вҖў Be careful when the 10-th car in front of you is slower than 43km/h. вҖў Cars must be equipped with a device (measure the speed and send out the signal to other cars).
- 23. Fasten your seat belt. optimistic fast driver defensive fast driver optimistic slow driver defensive slow driver you are here
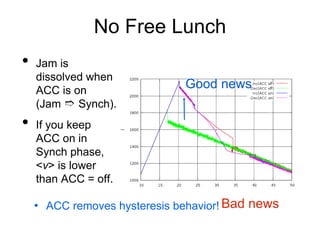
- 24. No Free Lunch вҖў Jam is dissolved when ACC is on (Jam вһұ Synch). вҖў If you keep ACC on in Synch phase, <v> is lower than ACC = off. Good news Bad news вҖў ACC removes hysteresis behavior!
- 25. Summary вҖў Traffic problem was studied by using a CA model. вҖў Strong hysteresis behavior found between Synch and Jam phases. Once in the Jam phase, it becomes very difficult to return to Synch phase. вҖў A simple ACC was suggested: If you are approaching downstream jam, drive carefully. вҖў www.kbsnews.com (search к№ҖлІ”мӨҖ)