
Pred netĘđĪÃĪÆĪßĪŋ
- 1. Deep Predictive Coding Networks (PredNet)ĪōĘđĪÃĪÆĪßĪŋ ĄūĩÚĢēŧØĄŋČŦÃĨĒĐ`ĨĨÆĨŊĨÁĨãŅÐūŋŧáĨŠĨÕŧá
- 2. ÄŋīÎ ? ŨÔžš―B―é ? PredNetĪËĪÄĪĪĪÆ ? ―ņŧØĪäĪÃĪÆĪĪŋĪģĪČ ? ĨĻĨéĐ`ĨæĨËĨÃĨČĪÎŋÉŌŧŊ ? øŧŊÐÔÄÜ
- 3. ŨÔžš―B―é ? ÃûĮ°ĢšÂäšÏÐŌÖÎ ? īóŅ§rīúĢš ? Óŧ?ŧÏņIĀíĪÎŅÐūŋ ? ÂIĢš ? ÖÆÓųĨĻĨóĨļĨËĨĒ ? ·ËŪĨŨĨéĨóĨČĪÎÖÆÓųĨ―ĨÕĨČé_°kĄĒĨĮĐ`Ĩŋ―âÎö ? žžÐg·ÖŌ° ? MATLABĄĒPython ? rÏĩÁÐ―âÎöĄĒŽFīúÖÆÓųĄĒŧÏņIĀí
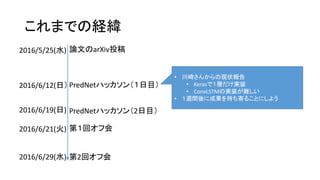
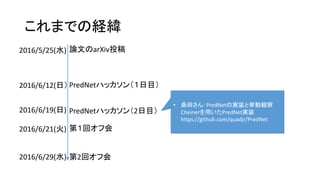
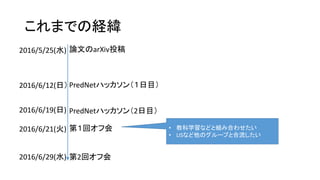
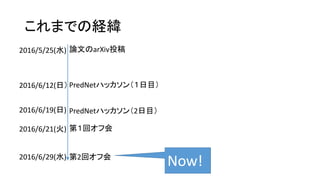
- 5. ĪģĪėĪÞĪĮĪÎ―Uū PredNetĨÏĨÃĨŦĨ―ĨóĢĻĢąČÕÄŋĢĐ PredNetĨÏĨÃĨŦĨ―ĨóĢĻ2ČÕÄŋĢĐ ĩÚĢąŧØĨŠĨÕŧá ĩÚ2ŧØĨŠĨÕŧá ÕÎÄĪÎarXivÍķļå2016/5/25(ËŪ) 2016/6/12(ČÕĢĐ 2016/6/19(ČÕ) 2016/6/21(ŧð) 2016/6/29(ËŪ) Deep Predictive Coding Networks for Video Prediction and Unsupervised Learning David Cox(ĨÏĐ`ĨÐĐ`ĨÉīóŅ§ĪÎÓËãÕĩÄÉúÎïŅ§Õß)
- 6. ĪģĪėĪÞĪĮĪÎ―Uū PredNetĨÏĨÃĨŦĨ―ĨóĢĻĢąČÕÄŋĢĐ PredNetĨÏĨÃĨŦĨ―ĨóĢĻ2ČÕÄŋĢĐ ĩÚĢąŧØĨŠĨÕŧá ĩÚ2ŧØĨŠĨÕŧá ÕÎÄĪÎarXivÍķļå2016/5/25(ËŪ) 2016/6/12(ČÕĢĐ 2016/6/19(ČÕ) 2016/6/21(ŧð) 2016/6/29(ËŪ) ? īĻÆéĪĩĪóĪŦĪéĪÎŽFŨīóļæ ? KerasĪĮĢąÓĪĀĪągŨ° ? ConvLSTMĪÎgŨ°ĪŽëyĪ·ĪĪ ? ĢąßLégááĪËģÉđûĪōģÖĪÁžÄĪëĪģĪČĪËĪ·ĪčĪĶ
- 10. ŌÉ?ĪäĪęĪŋĪĪĪģĪČ 1. øŧŊÐÔÄÜĢĻŅ§ÁĪČß`ĪĶĨĮĐ`ĨŋĪōČëĪėĪŋrĪÎÓčy―YđûĢĐ 2. ëLĪėÓĪÎŋÉŌŧŊ 3. KÁÐÓËã 4. ŪģĢĘÖŠ 5. ŧŊŅ§Á 6. LISĪČßBÐŊ ĨÏĨÃĨŦĨ―ĨóĄĒĨŠĨÕŧáĄĒFacebookĪĘĪÉĪĮģöĪŋĨĒĨĪĨĮĨĢĨĒ
- 11. ŌÉ?ĪäĪęĪŋĪĪĪģĪČ 1. øŧŊÐÔÄÜĢĻŅ§ÁĪČß`ĪĶĨĮĐ`ĨŋĪōČëĪėĪŋrĪÎÓčy―YđûĢĐ 2. ëLĪėÓĪÎŋÉŌŧŊ 3. KÁÐÓËã 4. ŪģĢĘÖŠ 5. ŧŊŅ§Á 6. LISĪČßBÐŊ ĨÏĨÃĨŦĨ―ĨóĄĒĨŠĨÕŧáĄĒFacebookĪĘĪÉĪĮģöĪŋĨĒĨĪĨĮĨĢĨĒ
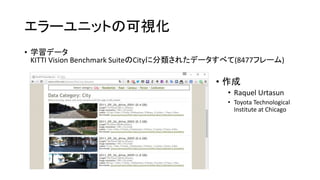
- 13. ĨĻĨéĐ`ĨæĨËĨÃĨČĪÎŋÉŌŧŊ ? Ņ§ÁĨĮĐ`Ĩŋ KITTI Vision Benchmark SuiteĪÎCityĪË·ÖîĪĩĪėĪŋĨĮĐ`ĨŋĪđĪŲĪÆ(8477ĨÕĨėĐ`Ĩā) ? ŨũģÉ ? Raquel Urtasun ? Toyota Technological Institute at Chicago
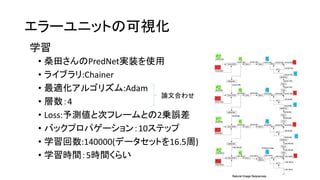
- 14. ĨĻĨéĐ`ĨæĨËĨÃĨČĪÎŋÉŌŧŊ ? ÉĢĖïĪĩĪóĪÎPredNetgŨ°ĪōĘđÓà ? ĨéĨĪĨÖĨéĨę:Chainer ? ŨîßmŧŊĨĒĨëĨīĨęĨšĨā:Adam ? ÓĘýĢš4 ? Loss:ÓčyĪČīÎĨÕĨėĐ`ĨāĪČĪÎ2\Õ`ēî ? ĨÐĨÃĨŊĨŨĨíĨŅĨēĐ`Ĩ·ĨįĨóĢš10ĨđĨÆĨÃĨŨ ? Ņ§ÁŧØĘý:140000(ĨĮĐ`ĨŋĨŧĨÃĨČĪō16.5ÖÜ) ? Ņ§ÁrégĢš5régĪŊĪéĪĪ Ņ§Á ÕÎÄšÏĪïĪŧ
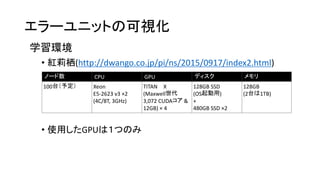
- 15. ĨĻĨéĐ`ĨæĨËĨÃĨČĪÎŋÉŌŧŊ ? žtĀōÆÜ(http://dwango.co.jp/pi/ns/2015/0917/index2.html) ? ĘđÓÃĪ·ĪŋGPUĪÏĢąĪÄĪÎĪß ĨÎĐ`ĨÉĘý CPU GPU ĨĮĨĢĨđĨŊ ĨáĨâĨę 100ĖĻĢĻÓčķĻĢĐ Xeon E5-2623 v3 ĄÁ2 (4C/8T, 3GHz) TITAN X (MaxwellĘĀīú 3,072 CUDAĨģĨĒ & 12GB) ĄÁ 4 128GB SSD (OSÆðÓÓÃ) + 480GB SSD ĄÁ2 128GB (2ĖĻĪÏ1TB) Ņ§Áhūģ
- 18. ĨĻĨéĐ`ĨæĨËĨÃĨČĪÎŋÉŌŧŊ ŋžēė?ļÐÏë ? ĨĻĨÃĨļĘģöŧÏņĪËËÆĪÆĪĪĪë ? šÎđĘĪŦĢŋ ? ÓčyŧÏņĪÏĪÜĪäĪąĪÆĪĪĪë ĄúÔŠŧÏņĪČēî·ÖĪōČĄĪëĪČļßÖÜēĻģÉ·ÖĪĀĪąĪŽēÐĪë ? ĨĻĨÃĨļŌÔÍâĪÎēŋ·ÖĪÏČëÁĶĪōĪ―ĪÎĪÞĪÞģöĪŧĪÐÕý―âĪČŌŧÖÂĪđĪë ? ĪčĪŊŋžĪĻĪėĪÐĩąĪŋĪęĮ°ĪĀĪąĪÉģõĪáĪÆŌĪŋrĪÏó@ĪĪĪŋ ? ĪâĪŦĪđĪëĪČĄĒPredictive CodingĪÎŋžĪĻ·―ĪĀĪąĪĮĨĻĨÃĨļĪË·īęĪđĪë ĨËĨåĐ`ĨíĨóĪŽÉúĪÞĪėĪëĀíÓÉĪŽÕhÃũĪĮĪĪëĪŦĪâĢŋ ĢĻ―ņĪÏĨđĨŅĐ`ĨđĨģĐ`ĨĮĨĢĨóĨ°ĪĮÕhÃũĪĩĪėĪÆĪĪĪëĢĐ
- 20. ĨĻĨéĐ`ĨæĨËĨÃĨČĪÎŋÉŌŧŊ ŋžēė?ļÐÏë ? ÓčyĪËʧĄĪ·ĪŋöšÏĄĒĨÕĨėĐ`Ĩāégēî·ÖĪōĨŨĨéĨđĪČĨÞĨĪĨĘĨđĪĮ·ÖĪąĪŋ ĪčĪĶĪĘŧÏņ ? ŌâÍâÐÔĪÏĪĘĪĪ ? ―ņŧØĪÎöšÏ ? ŨóĪŽoĪĪĪČÓčÏëĪ·ĪÆĪĪĪÆĪŋĪŽīæÔÚĪ·ĪŋĪâĪÎ ? ÓŌĪŽÓÐĪëĪČÓčÏëĪ·ĪÆĪĪĪŋĪŽīæÔÚĪ·ĪĘĪŦĪÃĪŋĪâĪÎ ? °ŨĪĪąģū°ĪËü\ĪĪÎïĖåĪŽĪĒĪÃĪŋöšÏĪŠĪ―ĪéĪŊŨóÓŌ·īÜ
- 21. øŧŊÐÔÄÜ ŌÉ ? PredNetĪËÓūĪČß`ĪĶÓĪĪÎÓŧĪōŌĪŧĪŋĪéĪÉĪĶĪĘĪëĪŦĢŋ ? ÜÝdĨŦĨáĨéĪÎÓŧĪĮŅ§ÁĄĒÐlÐĮĪÎŧÏņĪōÓčy ĄúoĀíĪ―ĪĶ ? ÜÝdĨŦĨáĨéĪÎÓŧĪĮŅ§ÁĄĒķĻĩãĨŦĨáĨéĪËÓģĪëiÐÐÕßĪōÓčy ĄúÎĒÃîĪĘĨéĨĪĨóĢĻĪĮĪĪ―ĪĶĪĘÝĪÏĪđĪëĢĐ ? Į°ĘöĪÎĨâĨĮĨëĪōÓÃĪĪKITTIĪÎPersonĨĮĐ`ĨŋĪōÓčy
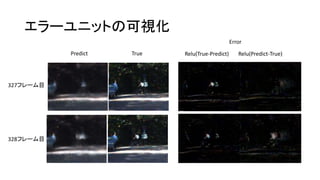
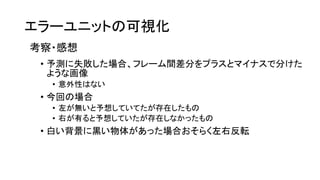
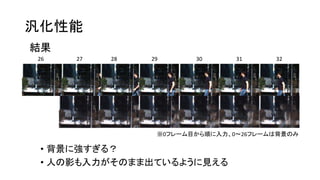
- 22. øŧŊÐÔÄÜ ―Yđû 26 27 28 29 30 31 32 Ąų0ĨÕĨėĐ`ĨāÄŋĪŦĪéíĪËČëÁĶĄĒ0ĄŦ26ĨÕĨėĐ`ĨāĪÏąģū°ĪÎĪß ? ąģū°ĪËĪđĪŪĪëĢŋ ? ČËĪÎÓ°ĪâČëÁĶĪŽĪ―ĪÎĪÞĪÞģöĪÆĪĪĪëĪčĪĶĪËŌĪĻĪë
- 23. øŧŊÐÔÄÜ ÓčyĪĮĪĪÆĪĪĪĘĪĪĢŋ ? ÉŲĪĘĪĪĨĮĐ`ĨŋĪĮŅ§ÁĪĩĪŧĪŋrĪÏĪâĪĶÉŲĪ·ÓčyĪĮĪĪë ? ÓŨũī_ÕJÓÃĪËŨũĪÃĪŋĨâĨĮĨë ? Ņ§ÁĨĮĐ`ĨŋĢšKITTI CityĪηŽšÅĪÎČôĪĪĪÛĪĶĪŦĪé7ĪÄ(1477ĨÕĨėĐ`Ĩā) ? Ņ§ÁŧØĘýĢš80000(ĨĮĐ`ĨŋĨŧĨÃĨČ54ÖÜ) ? ËûĪÎĖõžþĪÏĮ°ĘöĪÎĨâĨĮĨëĪČÍŽĪļ
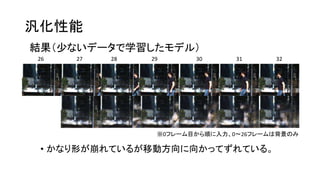
- 24. øŧŊÐÔÄÜ ―YđûĢĻÉŲĪĘĪĪĨĮĐ`ĨŋĪĮŅ§ÁĪ·ĪŋĨâĨĮĨëĢĐ 26 27 28 29 30 31 32 Ąų0ĨÕĨėĐ`ĨāÄŋĪŦĪéíĪËČëÁĶĄĒ0ĄŦ26ĨÕĨėĐ`ĨāĪÏąģū°ĪÎĪß ? ĪŦĪĘĪęÐÎĪŽąĀĪėĪÆĪĪĪëĪŽŌÆÓ·―ÏōĪËÏōĪŦĪÃĪÆĪšĪėĪÆĪĪĪëĄĢ
- 25. øŧŊÐÔÄÜ ŋžēė?ļÐÏë ? ĪĘĪžĨĮĐ`ĨŋÁŋĪōĪäĪ·ĪŋrĪËĨÆĨđĨČĨĮĐ`ĨŋĪōÓčyĪĮĪĪĘĪŊĪĘĪëĪÎ ĪŦēŧÃũ ? ÅžČŧĢŋ ĄúÍŽĪļĨĮĐ`ĨŋĪĮÔŲķČŅ§ÁĪĩĪŧĪÆĪßĪŋĪŽÔŲŽFÐÔĪŽĪĒĪë ? Ņ§ÁŧØĘýĢŋ ÓŨũī_ÕJÓÃĨâĨĮĨëĢšĨĮĐ`ĨŋĨŧĨÃĨČ54ÖÜ CityČŦĪÆĪĮŅ§ÁĪ·ĪŋĨâĨĮĨëĢšĨĮĐ`ĨŋĨŧĨÃĨČ16ÖÜ Ąú56ÖÜĪÞĪĮŅ§ÁĪĩĪŧĪŋĪŽ―YđûĪÏļÄÉÆĪĩĪėĪĘĪĪ ? ĨĮĐ`ĨŋÁŋĪŽĪĻĪÆĄĒŅ§ÁÁŋĪâĪäĪ·ĪŋöšÏĪÏÉÏÎŧŧĨQĪËĪĘĪÃĪÆ ĪÛĪ·ĪĪĪŽĪ―ĪĶĪÏĪĘĪÃĪÆĪĪĪĘĪĪ
- 26. ĪÞĪČĪá ? ĨĻĨéĐ`ĨæĨËĨÃĨČĪÎŋÉŌŧŊ ? ĨĻĨÃĨļĘģöŧÏņĪË―üĪĪ ? ÓčyĪËʧĄĪ·ĪŋöšÏĨÕĨėĐ`Ĩāégēî·ÖĪË―üĪĪŧÏņ ? øŧŊÐÔÄÜ ? ģõĪáĪÆŌĪëĪčĪĶĪĘŧÏņĪĮĪâĪĒĪëģĖķČÓčyĪĮĪĪë ? ĪĘĪžĨĮĐ`ĨŋÁŋĪōĪäĪ·ĪŋĨâĨĮĨëĪĮÓčyĪĮĪĪĘĪŊĪĘĪëĪÎĪŦēŧÃũ