
































More Related Content
Similar to Proyecto auto-arduino usando un microcontrolador (20)
Recently uploaded (20)


















Proyecto auto-arduino usando un microcontrolador
- 1. PROJECT ARDUINO CAR Automation without limits with Arduino TEAM: -David MartĂnez Alvarez -Leonardo Isidoro GarcĂa -Juan Jose Favela Valles -Marco Ariel DomĂnguez GarcĂa -Raymundo David Olvera Guerrero
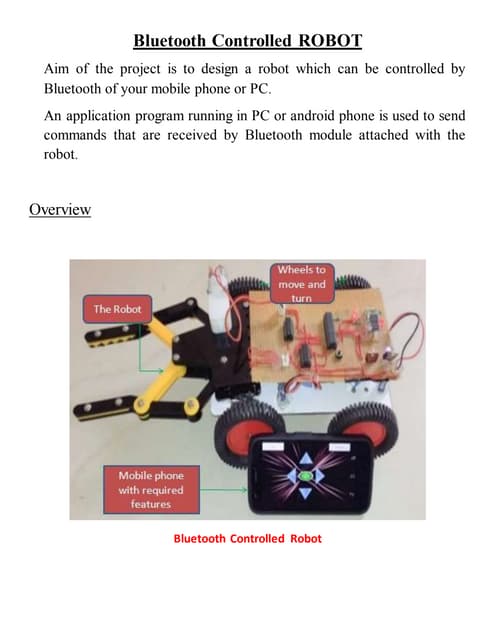
- 2. In this project we talk about the Arduino connections to control a car with Bluetooth, in which we use several components, and we also carry out a process of connections and programming to achieve the result. ABOUT OUR CAR-ARDUINO Introduction to the project
- 3. ARDUINO (Development board) it is the basis of the project, a programmable microcontroller that receives and processes data to control other components. BLUETOOTH MODULE (HC-05/HC-06) COMPONENTS MOTOR DRIVER (L298N o L293D) It is used to control the speed and direction of the motors, since Arduino cannot supply enough current on its own. Components used in the arduino car Enables wireless communication between Arduino and a mobile device for remote control.
- 4. POWER SUPPLY Batteries Supplies power to the board and motors, can be a rechargeable battery or a battery pack MOTORS DC motors DC motors that allow the movement of the carriage, controlled with modules such as the L298N. + COMPONENTS JUMPERS (Connection cables) They are essential in prototyping because they allow circuits to be assembled and modified without the need for soldering Components used in the arduino car
- 5. CONNECTION  We first need to define wich pins we are going to use on the arduino (pins 2,3,4,5) then we connect each one of the pins on the input pins of the driver, the next thing we do is to get 2 output cables for each motor and connect each 2 in series circuit from the driver 5v output we are going to get a vable that will be on the arduino Vin pin (this will power supply the arduino).  After that we are going to connect the driver negative input with the batery negative output and an arduino gnd pin (ground) for the bluethoot module, we use the pin number 10 and connect the rtx and trx pins backwardsand the vcc pin on the 5v output and one to the gnd pin(ground)
- 6. PROGRAMMING Mainly for the elaboration of the program we had to declare the pins that we will use, giving them tags called in1, in2, in3 and in4, this to simplify and optimize the algorithm as much as possible, once declared we must define what kind of gate these pins will be, this is done in the setup part since they are NON-variable settings throughout the algorithm, it can be input or output but in our case we define them as outputs, then we establish the parameters and alert message in which the Bluethoot module will work, we continue with the Loop This is where all those actions that we want our program to perform in reaction to our signal that our phone will emit and will be received by the bluethoot module are defined, allowing that with said signal the requirements to perform said actions already preloaded in the arduino are met, which would be, go forward, backward, left, right and a total height
- 7. THANK YOU VERY MUCH FOR YOUR ATTENTION!