PWM
•Download as PPT, PDF•
2 likes•955 views

Dokumen tersebut membahas tentang sistem kontrol suhu menggunakan sensor PT100 dan modulasi lebar pulsa (PWM). PWM digunakan untuk mengontrol daya keluaran dengan mengatur lebar pulsa sinyal. Sensor PT100 digunakan untuk mendeteksi suhu dan memberikan umpan balik ke sistem kontrol PWM untuk mengatur daya pemanas.













PWM
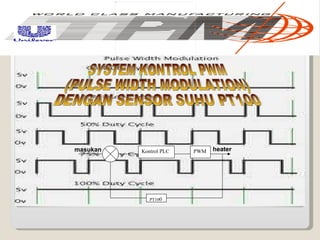
- 1. SYSTEM KONTROL PWM (PULSE WIDTH MODULATION) DENGAN SENSOR SUHU PT100 Kontrol PLC PWM PT10 0 masukan heater
- 2. 2.1 PWM ( Pulse Width Modulation ) PWM merupakan sebuah mekanisma untuk membangkitkan sinyal keluaran yang periodenya berulang antara high dan low dimana kita dapat mengontrol durasi sinyal high dan low sesuai dengan yang kita inginkan. Duty cycle merupakan prosentase periode sinyal high dan periode sinyal, prosentase duty cycle akan bebanding lurus dengan tegangan rata-rata yang dihasilkan. Berikut ilustrasi sinyal PWM, misalkan kondisi high 5 V dan kondisi low 0 V. Pengaturan lebar pulsa modulasi atau PWM merupakan salah satu teknik yang “ampuh” yang digunakan dalam sistem kendali (control system) saat ini. Pengaturan lebar modulasi dipergunakan di berbagai bidang yang sangat luas, salah satu diantaranya adalah: speed control (kendali kecepatan), power control (kendali sistem tenaga), measurement and communication (pengukuran atau instrumentasi dan telekomunikasi). Landasan Teori
- 3. 2.1.1 Prinsip Dasar PWM Modulasi lebar pulsa (PWM) dicapai/diperoleh dengan bantuan sebuah gelombang kotak yang mana siklus kerja (duty cycle) gelombang dapat diubah-ubah untuk mendapatkan sebuah tegangan keluaran yang bervariasi yang merupakan nilai rata-rata dari gelombang tersebut . Gambar 2.1 Bentuk gelombang kotak (pulsa) dengan kondisi high 5V dan low 0V
- 4. Ton adalah waktu dimana tegangan keluaran berada pada posisi tinggi (baca: high atau 1) dan, Toff adalah waktu dimana tegangan keluaran berada pada posisi rendah (baca: low atau 0). Anggap Ttotal adalah waktu satu siklus atau penjumlahan antara Ton dengan Toff , biasa dikenal dengan istilah “periode satu gelombang”. Ttotal = Ton + Toff …………… (2.1) Siklus kerja atau duty cycle sebuah gelombang di definisikan sebagai, (2.2 ) …………… Tegangan keluaran dapat bervariasi dengan duty-cycle dan dapat dirumusan sebagai berikut, sehingga : (2.3) ……
- 5. Dari rumus diatas dapat ditarik kesimpulan bahwa tegangan keluaran dapat diubahÂubah secara langsung dengan mengubah nilai Ton . Apabila Ton adalah 0, Vout juga akan 0. Apabila Ton adalah Ttotal maka Vout adalah Vin atau katakanlah nilai maksimumnya. PWM bekerja sebagai switching power suplai untuk mengontrol on dan off . Tegangan dc dikonvert menjadi sinyal kotak bolak balik, saat on mendekati teganga n puncak dan saat off mrnjadi nol (0) volt. Jika frekuensi switching cukup tinggi maka temperatur (suhu) yang dikendalikan akan semakin sesuai dengan yang diharapkan. Dengan mengatur duty cycle dari sinyal (modulasi lebar pulsa dari sinyal disebabkan oleh PWM). Terlihat pada gambar di bawah sinyal ref adalah sinyal tegangan dc yang dikonversi oleh sinyal gergaji dan menghasilkan sinyal kotak
- 6. Informasi analog dapat dikirimkan dengan menggunakan pulsa-pulsa tegangan atau pulsa-pulsa arus. Dengan modulasi pulsa, pembawa informasi terdiri dari pulsaÂpulsa persegi yang berulang-ulang. Salah satu teknik modulasi yang sering digunakan adalah teknik modulasi durasi atu lebar dari waktu tunda positif ataupun waktu tunda negatif pulsa-pulsa persegi tersebut. Untuk membangkitkan sinyal PWM adalah dengan menggunakan fungsi timer/counter yang dibandingkan nilainya dengan sebuah register tertentu . Gambar 2.2 Sinyal Referensi ( sinyal tegangan DC)
- 7. 2.1.2 PWM mode phase correct Dalam ATmega 8535 dapat dihasilkan PWM mode phase correct dimana nilai register counter TCNTx yang mencacah naik dan turun secara terus menerus akan selalu dibandingkan dengan register OCRx. Hasil perbandingan register TCNTx dan OCRx digunakan untuk membangkitkan sinyal PWM yang dikeluarkan melalui sebuah pin Ocx seperti gambar berikut. Gambar 2.3 PWM mode phase correct
- 8. Pada PWM 8 bit maka frekuensi dan duty cycle pada mode phase coreect dirumuskan . (2.4) (2.5) dengan; fPWM = frekuensi PWM fOSC = frekuensi osilator N= Skala clock D= Duty cycle
- 9. 2.1.3 PWM mode fast Pada mode fast hampir sama dengan phase correct hanya register TCNTx mencacah naik tanpa mencacah turun seperti gambar berikut. Gambar 2.4 PWM mode fast (2.6) (2. 7 ) dengan; fPWM = frekuensi PWM fOSC = frekuensi osilator
- 10. PWM Sinusoida satu fase menghasilkan pulsa PWM bolak balik satu fase dengan nilai tegangan bolak balik efektifnya dirumuskan T
- 11. Untuk menghasilkan sinyal PWM tersebut dapat menggunakan 2 buah sinyal sinus dan 1 sinyal segitiga atau dengan menggunakan 1 buah sinyal sinus dan 2 buah sinyal segitiga. Pada proses pembangkitan SPWM dengan menggunakan 2 buah sinyal sinus dan sebuah sinyal segitiga, dilakukan pembandingan amplitudo antara sinyal segitiga dengan sinyal sinus. Sinyal penggerak akan dibangkitkan apabila amplitude sinyal sinus lebih besar daripada amplitudo sinyal segitiga. Masing- masing sinyal penggerak digunakan untuk penyaklaran sehingga diperoleh sinyal PWM. Proses pembangkitan SPWM tersebut dapat dilihat pada gambar 2.5
- 12. Gambar 2.5 (a) Proses pembandingan antara sinyal pembawa dengan sinyal referensi, (b) Sinyal penggerak VAN, (c) Sinyal penggerak VBN, (d) Sinyal SPWM
- 13. Proses pembangkitan SPWM secara digital dapat dilakukan dengan 2 cara, yaitu: Dengan membangkitkan gelombang segitiga dan gelombang sinus secara diskret dengan metode look up table. Kemudian dilakukan pembandingan untuk masingÂmasing nilai amplitudo gelombang sinus dan segitiga seperti pada gambar 1. Cara ini sama halnya dengan membangkitkan gelombang sinus analog dan gelombang segitiga analog secara digital. Dengan mencari terlebih dahulu waktu untuk setiap pulsa masing-masing sinyal penggerak, untuk dijadikan data dalam proses pembangkitan sinyal penggerak secara look up table.
- 14. Thank You