Pythonによる4足歩行ロボットの制御と強化学習による歩行動作獲得の実例 #pyconjp
?
22 likes?13,523 views

2015年10月10日に開催された PyConJP2015 で発表したスライドです。 Gazeboによる4足歩行ロボットのシミュレーションを行い、強化学習(Q-Learning)で歩行動作を獲得する試みです。 また、その学習成果を実機のロボットに適用し、4足ロボットを実際に歩かせてみました。










Pythonによる4足歩行ロボットの制御と強化学習による歩行動作獲得の実例 #pyconjp
- 2. 自己绍介 ? @HideyukiTakei ? H/W: 回路設計、マイコン、外装設計、中国 ? SW: フロントエンドJS、Android、AWS ? かわいいロボットが好き
- 3. 自己绍介
- 4. アジェンダ ? 盆栽ロボット ? ロボットシミュレータGazeboの紹介 ? GazeboをPythonからコントロールする ? 簡単な機構のロボットの作成 ? Q学習による前進動作の獲得 ? 盆栽ロボを実機で動作させる ? まとめ
- 6. 形はできたが…
- 7. モーション作るのが面倒 ? モータの角度情報を手打ちして、モーション を作らなければならない ? 非常に面倒! ? 勝手にロボットが動いてくれたら良いのに 強化学習によるモーションの獲得を目指す!
- 8. 強化学習の壁 ? 数百回の試行回数… ? 試行回数多いと、ロボット自体が壊れそうな 心細い設計 ? 実物で学習させるには気が引ける ? 計測とかもめんどくさそう シミュレーションでやっちゃおう!
- 9. Gazebo ? http://gazebosim.org/ ? オープンソースな3Dのロボット シミュレータ環境 ? リアルタイム、見た目きれい ? ODEやBulletなどの3D物理エンジン が切り替えられる ? よくROSといっしょに使われている ? バージョンの問題などもあるので、 今回はROSを使わず直接Gazebo とコミュニケーションする ? Gazeboはv6.1.0を利用
- 10. 骋补锄别产辞の见た目
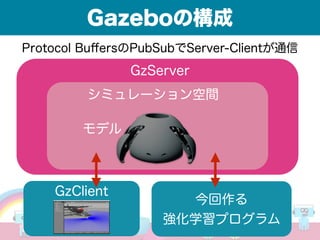
- 11. Gazeboの構成 GzServer シミュレーション空間 v GzClient モデル 今回作る 強化学習プログラム Protocol Bu?ersのPubSubでServer-Clientが通信
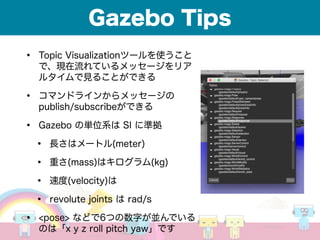
- 12. Gazebo Tips ? Topic Visualizationツールを使うこと で、現在流れているメッセージをリア ルタイムで見ることができる ? コマンドラインからメッセージの publish/subscribeができる ? Gazebo の単位系は SI に準拠 ? 長さはメートル(meter) ? 重さ(mass)はキログラム(kg) ? 速度(velocity)は ? revolute joints は rad/s ? <pose> などで6つの数字が並んでいる のは「x y z roll pitch yaw」です
- 13. PythonでGazeboと通信 ? PyGazebo ? https://github.com/jpieper/pygazebo ? ほぼProtoBufの *_pb2.py のファイル ? 今回使う機能 ? Subscribe ? ロボットの座標、姿勢 ? Publish ? ロボットのモータの角度指定
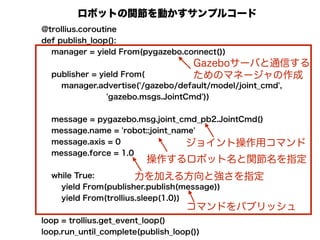
- 14. @trollius.coroutine def publish_loop(): manager = yield From(pygazebo.connect()) publisher = yield From( manager.advertise('/gazebo/default/model/joint_cmd', 'gazebo.msgs.JointCmd')) message = pygazebo.msg.joint_cmd_pb2.JointCmd() message.name = 'robot::joint_name' message.axis = 0 message.force = 1.0 while True: yield From(publisher.publish(message)) yield From(trollius.sleep(1.0)) loop = trollius.get_event_loop() loop.run_until_complete(publish_loop()) ジョイント操作用コマンド ロボットの関節を動かすサンプルコード 操作するロボット名と関節名を指定 力を加える方向と強さを指定 コマンドをパブリッシュ Gazeboサーバと通信する ためのマネージャの作成
- 15. モデルの表現 ? SDF(http://sdformat.org/)を利用 ? ロボットシミュレーション向け ? モデルや環境を定義するための XMLフォーマット ? モデルの形(STLかDAEを指定)、回転軸、表面の摩 擦係数などの物理的な特性が定義できる ? モデルを動かす環境もSDFで定義する ? https://bitbucket.org/osrf/gazebo_models/src こちらにGazeboで使えるSDFが集まっている ? WillowGarageのPR2などのSDFを参考にして モデルの定義をするのがオススメ
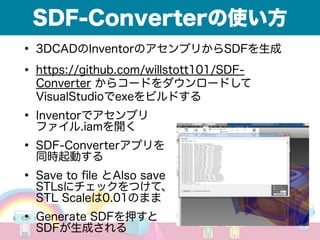
- 16. SDF-Converterの使い方 ? 3DCADのInventorのアセンブリからSDFを生成 ? https://github.com/willstott101/SDF- Converter からコードをダウンロードして VisualStudioでexeをビルドする ? Inventorでアセンブリ ファイル.iamを開く ? SDF-Converterアプリを 同時起動する ? Save to ?le とAlso save STLsにチェックをつけて、 STL Scaleは0.01のまま ? Generate SDFを押すと SDFが生成される
- 17. 試しに簡単なロボットを作ってみよう ? 本格的なロボットの前に板型ロボットに前進移動の モーションを獲得させる ? 形は3DCADで作成 ? CADデータからSDFを作成 ? visualとcollisionのモデルは両方同じSTLを使用 ? SDF-Converter(https://github.com/willstott101/SDF-Converter) を利用してSDFを作ろう SDF 3DCADの Inventorで作成 SDF-Converter でInventorの アセンブリから SDFを生成 SDFをGazeboに インポートする
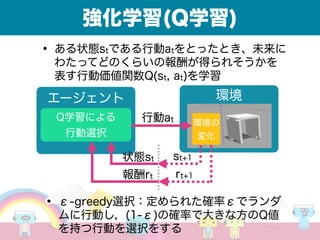
- 18. 強化学習(Q学習) ? ある状態stである行動atをとったとき、未来に わたってどのくらいの報酬が得られそうかを 表す行動価値関数Q(st, at)を学習 ? ε-greedy選択:定められた確率εでランダ ムに行動し,(1-ε)の確率で大きな方のQ値 を持つ行動を選択をする エージェント Q学習による 行動選択 環境 行動at 状態st 環境の 変化 報酬rt rt+1 st+1
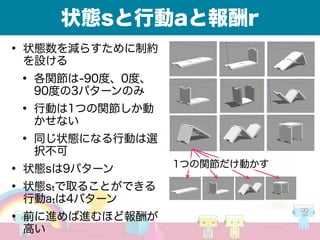
- 19. 状態sと行動aと報酬r ? 状態数を減らすために制約 を設ける ? 各関節は-90度、0度、 90度の3パターンのみ ? 行動は1つの関節しか動 かせない ? 同じ状態になる行動は選 択不可 ? 状態sは9パターン ? 状態stで取ることができる 行動atは4パターン ? 前に進めば進むほど報酬が 高い 1つの関節だけ動かす
- 21. 最初のころ バタバタしかしてない
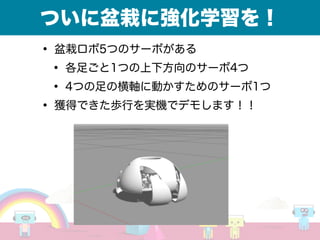
- 23. ついに盆栽に強化学習を! ? 盆栽ロボ5つのサーボがある ? 各足ごと1つの上下方向のサーボ4つ ? 4つの足の横軸に動かすためのサーボ1つ ? 獲得できた歩行を実機でデモします!!
- 24. 歩行の様子
- 25. まとめ ? Q学習でロボットに前進動作の獲得をさせた ? シミュレーションなら意外と簡単 ? ソースコードはのちほど公開するので、 みなさん動かしてみてください! ? 盆栽は乞うご期待!
- 27. ロボット作りでよく使うツール ? eagle http://www.cadsoftusa.com/ ? プリント基板設計ソフトウェア ? elecrow http://www.elecrow.com/ ? 激安プリント基板製造サービス ? Inventor ? 3D CAD。Fusion360は無料で使える ? Shapeways ? ヨーロッパの3Dプリントサービス ? AVR & GCC ? 8bitマイコン(C言語で開発)