Quicksort: illustrated step-by-step walk through
4 likes11,554 views

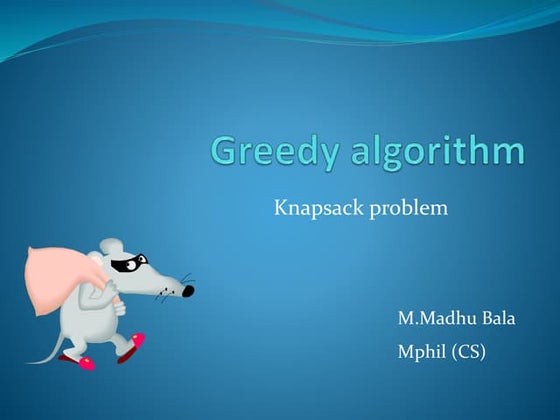
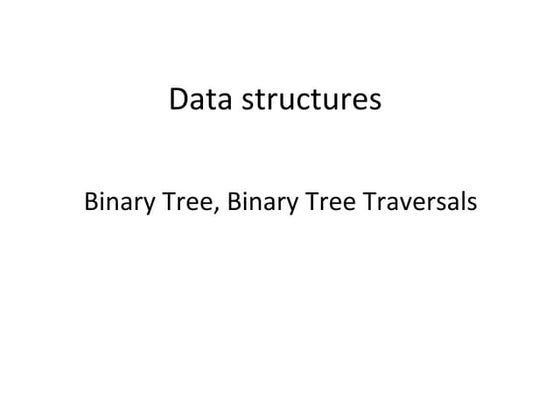
A step-by-step illustration of Quicksort to help you walk through a series of operations. Illustration is accompanied by actual code with bold line indicating the current operation.


![[0]
[1]
[2]
[3]
[4]
[5]
12
7
14
9
10
11
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-3-320.jpg)
![store
Index
i
begin
12
last
7
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-4-320.jpg)
![i
store
Index
0
begin
12
last
7
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-5-320.jpg)
![i
0
store
Index
0
begin
12
last
7
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-6-320.jpg)
![i
store
Index
0
0<5
is true
0
begin
12
last
7
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-7-320.jpg)
![i
store
Index
0
12 <= 11
is false
0
begin
12
last
7
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-8-320.jpg)
![i
store
Index
1
0
begin
12
last
7
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-9-320.jpg)
![i
store
Index
1
7 <= 11
is true
0
begin
12
last
7
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-10-320.jpg)
![i
store
Index
1
0
begin
12
Swap
last
7
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-11-320.jpg)
![i
store
Index
1
0
begin
7
Swap
last
12
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-12-320.jpg)
![i
1
store
Index
1
begin
7
last
12
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-13-320.jpg)
![i
store
Index
2
1
begin
7
last
12
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-14-320.jpg)
![i
store
Index
2
2<5
is true
1
begin
7
last
12
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-15-320.jpg)
![i
store
Index
2
14 <= 11
is fase
1
begin
7
last
12
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-16-320.jpg)
![i
store
Index
3
1
begin
7
last
12
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-17-320.jpg)
![i
store
Index
3
3<5
is true
1
begin
7
last
12
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-18-320.jpg)
![i
store
Index
3
9 <= 11
is true
1
begin
7
last
12
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-19-320.jpg)
![Swap
i
store
Index
3
1
begin
7
last
12
14
9
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-20-320.jpg)
![Swap
i
store
Index
3
1
begin
7
last
9
14
12
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-21-320.jpg)
![i
store
Index
3
2
begin
7
last
9
14
12
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-22-320.jpg)
![i
store
Index
4
2
begin
7
last
9
14
12
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-23-320.jpg)
![4<5
is true
store
Index
i
4
2
begin
7
last
9
14
12
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-24-320.jpg)
![10 <= 11
is true
store
Index
i
4
2
begin
7
last
9
14
12
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-25-320.jpg)
![Swap
i
store
Index
4
2
begin
7
last
9
14
12
10
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-26-320.jpg)
![Swap
i
store
Index
4
2
begin
7
last
9
10
12
14
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-27-320.jpg)
![i
store
Index
4
3
begin
7
last
9
10
12
14
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-28-320.jpg)
![i
store
Index
3
begin
7
5
last
9
10
12
14
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-29-320.jpg)
![4<5
is false
store
Index
i
3
begin
7
5
last
9
10
12
14
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-30-320.jpg)
![Swap
i
store
Index
3
begin
7
5
last
9
10
12
14
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
11](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-31-320.jpg)
![Swap
i
store
Index
3
begin
7
5
last
9
10
11
14
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
12](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-32-320.jpg)
![i
store
Index
3
begin
7
5
last
9
10
11
14
int storeIndex = begin;
for (int i = begin; i < last; i++) {
if (array[i] <= array[last]) {
Swap(array, i, storeIndex);
storeIndex = storeIndex + 1;
}
}
Swap(array, storeIndex, last);
return storeIndex;
12](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-33-320.jpg)

![pivot
Index
[0]
[1]
[2]
[3]
[4]
9
7
5
11
12
[5]
2
[6]
14
[7]
[8]
3
int pivotIndex = 0;
if (begin < last) {
pivotIndex = Partition(array, begin, last);
QuickSort(array, begin, pivotIndex - 1);
QuickSort(array, pivotIndex + 1, last);
}
else {
return;
}
10
[9]
6](https://image.slidesharecdn.com/quicksort-illustratedwalkthrough-131127162551-phpapp02/85/Quicksort-illustrated-step-by-step-walk-through-35-320.jpg)














































More Related Content
What's hot (20)
Viewers also liked (7)





More from Yoshi Watanabe (8)








Quicksort: illustrated step-by-step walk through
- 2. Partition function This function does the most of the heavy lifting, so we look at it first, then see it in the context of Quicksort algorithm
- 3. [0] [1] [2] [3] [4] [5] 12 7 14 9 10 11 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex;
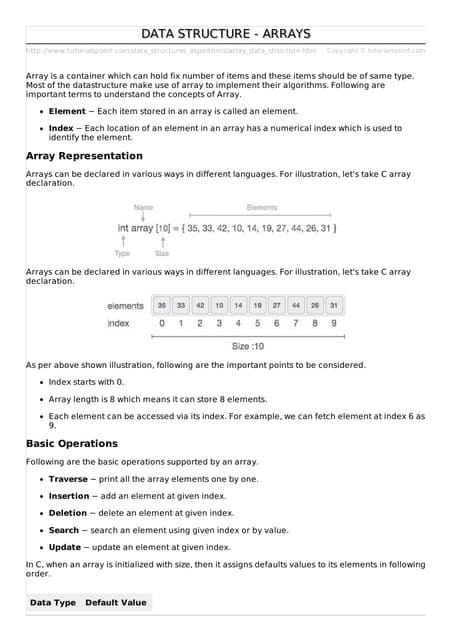
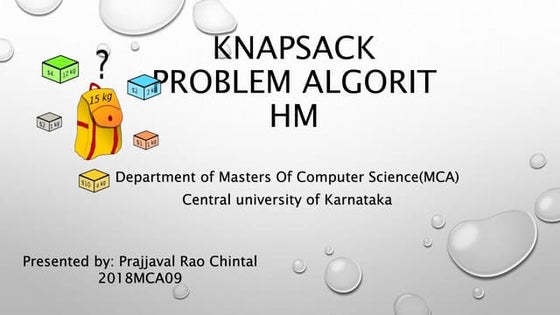
- 4. store Index i begin 12 last 7 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 5. i store Index 0 begin 12 last 7 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 6. i 0 store Index 0 begin 12 last 7 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 7. i store Index 0 0<5 is true 0 begin 12 last 7 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 8. i store Index 0 12 <= 11 is false 0 begin 12 last 7 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 9. i store Index 1 0 begin 12 last 7 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 10. i store Index 1 7 <= 11 is true 0 begin 12 last 7 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 11. i store Index 1 0 begin 12 Swap last 7 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 12. i store Index 1 0 begin 7 Swap last 12 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 13. i 1 store Index 1 begin 7 last 12 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 14. i store Index 2 1 begin 7 last 12 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 15. i store Index 2 2<5 is true 1 begin 7 last 12 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 16. i store Index 2 14 <= 11 is fase 1 begin 7 last 12 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 17. i store Index 3 1 begin 7 last 12 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 18. i store Index 3 3<5 is true 1 begin 7 last 12 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 19. i store Index 3 9 <= 11 is true 1 begin 7 last 12 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 20. Swap i store Index 3 1 begin 7 last 12 14 9 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 21. Swap i store Index 3 1 begin 7 last 9 14 12 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 22. i store Index 3 2 begin 7 last 9 14 12 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 23. i store Index 4 2 begin 7 last 9 14 12 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 24. 4<5 is true store Index i 4 2 begin 7 last 9 14 12 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 25. 10 <= 11 is true store Index i 4 2 begin 7 last 9 14 12 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 26. Swap i store Index 4 2 begin 7 last 9 14 12 10 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 27. Swap i store Index 4 2 begin 7 last 9 10 12 14 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 28. i store Index 4 3 begin 7 last 9 10 12 14 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 29. i store Index 3 begin 7 5 last 9 10 12 14 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 30. 4<5 is false store Index i 3 begin 7 5 last 9 10 12 14 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 31. Swap i store Index 3 begin 7 5 last 9 10 12 14 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 11
- 32. Swap i store Index 3 begin 7 5 last 9 10 11 14 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 12
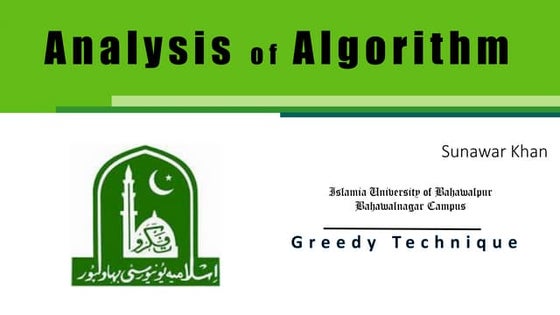
- 33. i store Index 3 begin 7 5 last 9 10 11 14 int storeIndex = begin; for (int i = begin; i < last; i++) { if (array[i] <= array[last]) { Swap(array, i, storeIndex); storeIndex = storeIndex + 1; } } Swap(array, storeIndex, last); return storeIndex; 12
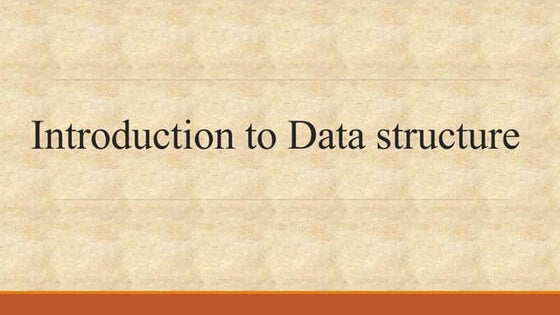
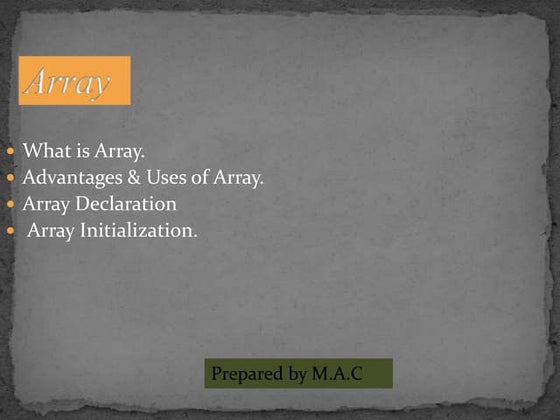
- 34. Quicksort algorithm Now we use Partition in the context of Quicksort
- 35. pivot Index [0] [1] [2] [3] [4] 9 7 5 11 12 [5] 2 [6] 14 [7] [8] 3 int pivotIndex = 0; if (begin < last) { pivotIndex = Partition(array, begin, last); QuickSort(array, begin, pivotIndex - 1); QuickSort(array, pivotIndex + 1, last); } else { return; } 10 [9] 6
- 36. pivot Index 0 9 7 5 11 12 2 14 3 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 6
- 37. 0<9 is true pivot Index 0 9 7 5 11 12 2 14 3 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 6
- 38. Partition 0..9 pivot Index 0 9 7 5 11 12 2 14 3 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 6
- 39. these are <= 6 these are > 6 pivot Index 5 2 3 3 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 40. Call Stack #0 pivot Index 5 2 3 3 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 41. pivot Index Call Stack #1 Call Stack #0 5 2 3 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 42. pivot Index 0 5 2 3 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 43. 0<2 is true pivot Index 0 5 2 3 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 44. Partition 0..2 pivot Index 0 5 2 3 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 45. pivot Index 1 2 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 46. Call Stack #1 Call Stack #0 pivot Index 1 2 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 47. Call Stack #2 pivot Index Call Stack #1 Call Stack #0 2 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 48. Call Stack #2 Call Stack #1 Call Stack #0 pivot Index 0 2 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 49. Call Stack #2 0<0 is false Call Stack #1 Call Stack #0 pivot Index 0 2 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 50. Call Stack #2 Call Stack #1 Call Stack #0 pivot Index 0 2 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 51. Call Stack #1 Call Stack #0 pivot Index 1 2 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 52. Call Stack #2 pivot Index Call Stack #1 Call Stack #0 2 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 53. Call Stack #2 Call Stack #1 Call Stack #0 pivot Index 2 0 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 54. 0<0 is false Call Stack #2 Call Stack #1 Call Stack #0 pivot Index 2 0 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 55. Call Stack #2 Call Stack #1 Call Stack #0 pivot Index 2 0 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 56. Call Stack #1 Call Stack #0 pivot Index 1 2 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } return (at the end of the function. Implicit ¡®return¡¯ statement 10 11
- 57. We are done with these elements! Call Stack #0 pivot Index 2 3 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11
- 58. pivot Index Call Stack #1 Call Stack #0 Walkthrough ends here. The right hand side is also sorted as it recursively calls Quicksort. 2 3 5 6 12 7 14 9 int pivotIndex = 0; if (start < end) { pivotIndex = Partition(array, start, end); QuickSort(array, start, pivotIndex - 1); QuickSort(array, pivotIndex + 1, end); } else { return; } 10 11