Raspberry-PI GPIO with Python
ŌĆó
6 likesŌĆó3,106 views

The slide that explains how to make circuits that connected to Raspberry PI GPIO and several sensors. This slides show how to program using Python language.


![http://blog.xcoda.net
Raspberry-Pi
GPIO
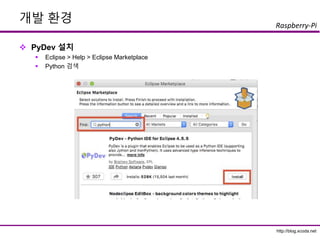
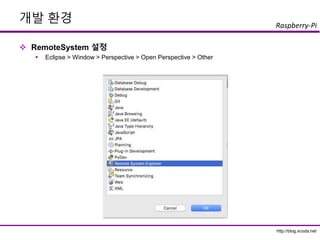
’üČ Sysfsļź╝ ņØ┤ņÜ®ĒĢ£ C Program ŌĆō gpioled.c
sprintf(buff, "/sys/class/gpio/gpio%d/direction" ,
gpio_pin);
fd = open(buff, O_WRONLY);
if (fd == -1) {
perror("fail to open GPIO Direction File" );
return 1;
}
if (write (fd, "out" , 4) == -1) {
perror("fail to set directionn" );
return 1;
}
close(fd);
#include <stdio.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
int main( int argc, char **argv) {
int gpio_pin = 18;
int fd;
char buff[BUFSIZ];
fd = open("/sys/class/gpio/export", O_WRONLY );
if (fd == -1) {
perror("fail to open export." );
return 1;
}
sprintf(buff, "%d" , gpio_pin);
if (write (fd, buff, sizeof(buff)) == -1) {
perror("fail to export GPIO" );
return 1;
}
close(fd);](https://image.slidesharecdn.com/rpigpio-161029143834/85/Raspberry-PI-GPIO-with-Python-32-320.jpg)
![http://blog.xcoda.net
Raspberry-Pi
GPIO
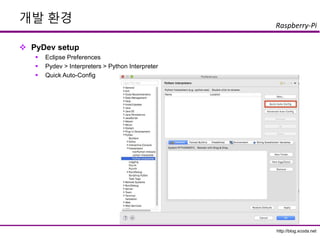
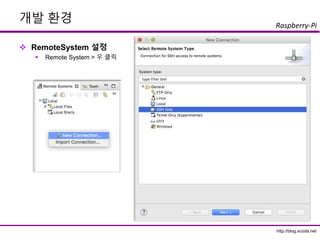
’üČ Rpi.GPIO ĻĖ░ļ│Ė ĒĢ©ņłś
’é¦ import Rpi.GPIO as GPIO
’é¦ ļ¬©ļōł import
’é¦ GPIO.setmode(GPIO.BCM or GPIO.BOARD)
’é¦ GPIO.BCM : Broadcom SocņŚÉņä£ ņĀĢņØśĒĢ£ ļ▓łĒśĖ
’é¦ GPIO.BOARD : ļ│┤ļō£ņŚÉ ĒĢĆ ņł£ļ▓ł
’é¦ GPIO.setup(channel, direction[, intial=state] )
’é¦ channel : GPIO Pin ļ▓łĒśĖ
’é¦ direction : GPIO.IN, GPIO.OUT
’é¦ state : GPIO.HIGH, GPIO.LOW
’é¦ GPIO.setup(channel, GPIO.IN [, pull_up_down=pud])
’é¦ pud = GPIO.PUD_UP, GPIO.PUD_DOWN
’é¦ GPIO.input(channel)
’é¦ GPIO.output(channel, state)
’é¦ GPIO.cleanup()
’é¦ ņóģļŻīņĀäņŚÉ ņ×ÉņøÉ ļ░śļé®
’é¦ https://sourceforge.net/p/raspberry-gpio-python/wiki/Examples/](https://image.slidesharecdn.com/rpigpio-161029143834/85/Raspberry-PI-GPIO-with-Python-36-320.jpg)

![http://blog.xcoda.net
Raspberry-Pi
Digital Output
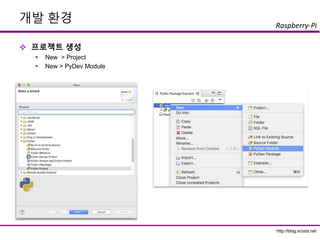
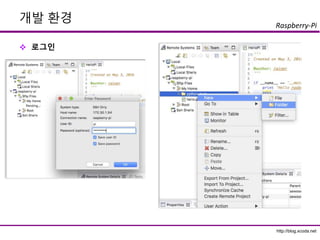
’üČ ĒŖĖļ×£ņ¦ĆņŖżĒä░ ņŖżņ£äņ╣ś Code
’é¦ LED BlinkņÖĆ ļÅÖņØ╝
pin = 18
try:
GPIO.setmode(GPIO.BCM)
GPIO.setup(pin, GPIO.OUT)
while True:
val = input("swtich [on:1, off:0]")
GPIO.output(pin, val)
finally:
print 'clean up'
GPIO.cleanup()](https://image.slidesharecdn.com/rpigpio-161029143834/85/Raspberry-PI-GPIO-with-Python-51-320.jpg)

![http://blog.xcoda.net
Raspberry-Pi
Sensor Modules
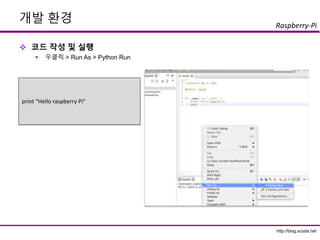
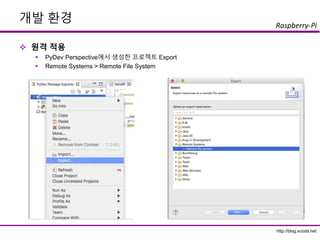
’üČ DHT-11 Source
’é¦ Rpi.GPIOļĪ£ ĻĄ¼Ēśä
’é¦ https://github.com/netikras/r-pi_DHT11/blob/master/dht11.py
def pullData():
global data
global effectiveData
global pin
data = []
effectiveData = []
GPIO.setup(pin,GPIO.OUT)
GPIO.output(pin,GPIO.HIGH)
time.sleep(0.025)
GPIO.output(pin,GPIO.LOW)
time.sleep(0.14)
GPIO.setup(pin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
for i in range(0,1000):
data.append(GPIO.input(pin))
import RPi.GPIO as GPIO
import time
import sys
def bin2dec(string_num):
return str(int(string_num, 2))
data = []
effectiveData = []
bits_min=999;
bits_max=0;
HumidityBit = ""
TemperatureBit = ""
crc = ""
crc_OK = False;
Humidity = 0
Temperature = 0
pin=4
GPIO.setmode(GPIO.BCM)](https://image.slidesharecdn.com/rpigpio-161029143834/85/Raspberry-PI-GPIO-with-Python-86-320.jpg)
![http://blog.xcoda.net
Raspberry-Pi
Sensor Modules
’üČ DHT-11 Source
’é¦ Rpi.GPIOļĪ£ ĻĄ¼Ēśä <Ļ│äņåŹ>
for i in range(0, 40):
buffer = "";
while(seek < len(data) and data[seek] == 0):
seek+=1;
while(seek < len(data) and data[seek] == 1):
seek+=1;
buffer += "1";
if (len(buffer) < bits_min):
bits_min = len(buffer)
if (len(buffer) > bits_max):
bits_max = len(buffer)
effectiveData.append(buffer);
def analyzeData():
seek=0;
bits_min=9999;
bits_max=0;
global HumidityBit
global TemperatureBit
global crc
global Humidity
global Temperature
HumidityBit = ""
TemperatureBit = ""
crc = ""
while(seek < len(data) and data[seek] == 0):
seek+=1;
while(seek < len(data) and data[seek] == 1):
seek+=1;](https://image.slidesharecdn.com/rpigpio-161029143834/85/Raspberry-PI-GPIO-with-Python-87-320.jpg)
![http://blog.xcoda.net
Raspberry-Pi
Sensor Modules
’üČ DHT-11 Source
’é¦ Rpi.GPIOļĪ£ ĻĄ¼Ēśä <Ļ│äņåŹ>
def isDataValid():
global Humidity
global Temperature
global crc
print "isDataValid(): H=%d, T=%d, crc=%d"% (int(Humidity),
int(Temperature), int(bin2dec(crc)))
if int(Humidity) + int(Temperature) == int(bin2dec(crc)):
return True;
else:
return False;
def printData():
global Humidity
global Temperature
print "H: "+Humidity
print "T: "+Temperature
for i in range(0, len(effectiveData)):
if (len(effectiveData[i]) < ((bits_max + bits_min)/2)):
effectiveData[i] = "0";
else:
effectiveData[i] = "1";
for i in range(0, 8):
HumidityBit += str(effectiveData[i]);
for i in range(16, 24):
TemperatureBit += str(effectiveData[i]);
for i in range(32, 40):
crc += str(effectiveData[i]);
Humidity = bin2dec(HumidityBit)
Temperature = bin2dec(TemperatureBit)](https://image.slidesharecdn.com/rpigpio-161029143834/85/Raspberry-PI-GPIO-with-Python-88-320.jpg)
![http://blog.xcoda.net
Raspberry-Pi
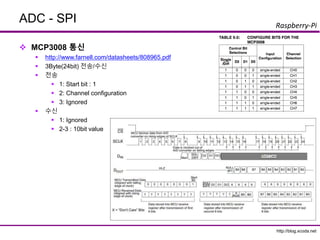
ADC - SPI
’üČ MCP3008ļĪ£ Ļ░Ćļ│ĆņĀĆĒĢŁ ņØĮĻĖ░
’é¦ open(port, dev)
’é¦ Port : 0
’é¦ Dev :CE0 =0, CE1=1
’é¦ xfer2([byte_1, byte_2, byte_3])
’é¦ byte_1 : 1
’é¦ byte_2 : channel config
’é¦ 1000 000 : channel 0
’é¦ byte_3 : 0(ignored)
’é¦ abc_out
’é¦ r[0] : ignored
’é¦ r[1] : 10bitņØś ņĄ£ņāüņ£ä 2bit Ļ░Æ
’é¦ r[2] : 10bitņØś ĒĢśņ£ä 8bit Ļ░Æ
import spidev, time
spi = spidev.SpiDev()
spi.open(0,0)
def analog_read(channel):
r = spi.xfer2([1, (8 + channel) << 4, 0])
adc_out = ((r[1]&3) << 8) + r[2]
return adc_out
try:
while True:
reading = analog_read(0)
voltage = reading * 3.3 / 1024
print("Reading=%dtVoltage=%f" % (reading,
voltage))
time.sleep(1)
finally:
spi.close()](https://image.slidesharecdn.com/rpigpio-161029143834/85/Raspberry-PI-GPIO-with-Python-100-320.jpg)
![http://blog.xcoda.net
Raspberry-Pi
Sound
’üČ ļ░śņ¦Øļ░śņ¦Ø ņ×æņØĆļ│ä ņŖżņ╝Ćņ╣ś
import wiringpi
from time import sleep
pin = 24
frequencies = {'c':262, 'd':294, 'e':330, 'f':349, 'g':392, 'a':440, 'b':494}
notes = 'ccggaag ffeeddc ggffeed ggffeed ccggaag ffeeddc'
wiringpi.wiringPiSetupGpio()
try:
wiringpi.softToneCreate(pin)
for i in notes:
if i != ' ':
wiringpi.softToneWrite(pin, frequencies[i])
sleep(0.3)
finally:
wiringpi.pinMode(pin, 0)](https://image.slidesharecdn.com/rpigpio-161029143834/85/Raspberry-PI-GPIO-with-Python-105-320.jpg)
![http://blog.xcoda.net
Raspberry-Pi
Camera
’üČ Pycamera Code
import time
import picamera
with picamera.PiCamera() as camera:
try:
camera.start_preview()
while True:
shutter = input('insert key when you are ready to take photo. [photo:1, video:2] ')
now_str = time.strftime("%Y%m%d-%H%M%S")
if shutter == 1:
camera.capture('/home/pi/demo/camera/photo%s.gif' %now_str)
elif shutter == 2:
camera.start_recording('/home/pi/demo/camera/video%s.h264' %now_str)
raw_input('insert key when you want to stop recoding.')
camera.stop_recording()
finally:
camera.stop_preview()](https://image.slidesharecdn.com/rpigpio-161029143834/85/Raspberry-PI-GPIO-with-Python-110-320.jpg)
Raspberry-PI GPIO with Python
- 1. http://blog.xcoda.net Raspberry Pi GPIO with Python Rev. R610 ņØ┤ņäĖņÜ░ (dltpdn@gmail.com)
- 2. http://blog.xcoda.net Raspberry-Pi ņäĖļČĆļ¬®ņ░© 1. Introduction 2. Rasbian Installation 3. Development Environment 4. GPIO 5. Digital Output 6. Digital Input 7. Analog Output ŌĆō PWM 8. Sensor Modules 9. ADC-SPI 10. Sound 11. Camera
- 3. http://blog.xcoda.net Raspberry-Pi Introduction ’üČ Raspberry-Pi ’é¦ https://en.wikipedia.org/wiki/Raspberry_Pi ’é¦ ņśüĻĄŁ ļØ╝ņ”łļ▓Āļ”¼ĒīīņØ┤ ņ×¼ļŗ©, Eben Upton ’é¦ ĒĢÖĻĄÉņÖĆ Ļ░£ļ░£ļÅäņāüĻĄŁ ņ╗┤Ēō©Ēä░ Ļ│╝ĒĢÖ ĻĄÉņ£Ī ņ”Øņ¦ä ļ¬®Ēæ£ ’é¦ 2011 ņĢīĒīī ļ│┤ļō£ ’é¦ 2012 ņ▓½ ĒīÉļ¦ż ’é¦ ļĖīļĪ£ļō£ņ╗┤ BCM2835 SoC ’é¦ PCņÖĆ ļÅÖņØ╝ĒĢśĻ▓ī ņé¼ņÜ®
- 4. http://blog.xcoda.net Raspberry-Pi Introduction ’üČ Raspberry Pi Boards ’é¦ https://www.raspberrypi.org/products/ Model A Model A+ Model B Raspberry Pi 2 Raspberry Pi 3 Raspberry Pi Zero Model B+
- 5. http://blog.xcoda.net Raspberry-Pi Introduction ’üČ Raspberry Pi 3 ’é¦ ARMv8 CPU 1.2GHz 64bit quad-core ’é¦ 802.11n Wireless LAN ’é¦ Bluetooth 4.1 ’é¦ Bluetooth Low Energy(BLE) ’é¦ 1GB RAM ’é¦ 4 USB ports ’é¦ 40 GPIO Pins ’é¦ Full HDMI port ’é¦ Ethernet port ’é¦ 3.5mm audio ’é¦ Camera interface(CSI) ’é¦ Display interface(DSI) ’é¦ Micro SD card slot ’é¦ VideoCore IV 3D graphics core
- 6. http://blog.xcoda.net Raspberry-Pi ņäĖļČĆļ¬®ņ░© 1. Introduction 2. Rasbian Installation 3. Development Environment 4. GPIO 5. Digital Output 6. Digital Input 7. Analog Output ŌĆō PWM 8. Sensor Modules 9. ADC-SPI 10. Sound 11. Camera
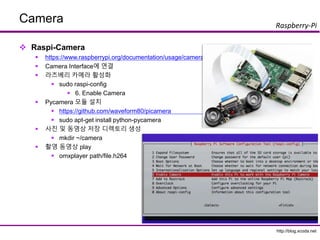
- 7. http://blog.xcoda.net Raspberry-Pi Rasbian Installation ’üČ Rasbian Installation ’é¦ OS image file download ’é¦ https://www.raspberrypi.org/downloads/raspbian/ ’é¦ Raspbian Jessie, Jessi Lite ’é¦ Image fileņØä SDņ╣┤ļō£ņŚÉ ļ│Ąņé¼ ’é¦ http://sourceforge.net/projects/win32diskimager/ ’é¦ Win32 Disk Imager ’é¦ USB-Serial console ņŚ░Ļ▓░ ĒĢĀ Ļ▓ĮņÜ░ ’é¦ Serial console tty ĒÖ£ņä▒ĒÖö ’é¦ Config.txt ĒīīņØ╝ņŚÉ ņČöĻ░Ć ’é¦ enable_uart=1 ’é¦ Core_req=250 ’é¦ Direct Lan Cable ņŚ░Ļ▓░ ĒĢĀ Ļ▓ĮņÜ░ ’é¦ Cmdline.txt ĒīīņØ╝ rootwait ļÆżņŚÉ ņČöĻ░Ć ’é¦ Ip=192.168.0.2 ’é¦ SDņ╣┤ļō£ļź╝ ļ│┤ļō£ņŚÉ Ļ╝ĮĻ│Ā ņĀäņøÉ ņØĖĻ░Ć ’é¦ PuttyļĪ£ Serial ļśÉļŖö IPļĪ£ ļĪ£ĻĘĖņØĖ ’é¦ ID : pi ’é¦ PWD : raspberry
- 8. http://blog.xcoda.net Raspberry-Pi Rasbian Installation ’üČ LCD Monitor setup ’é¦ http://elinux.org/index.php?title=RPiconfig ’é¦ /boot/config.txt ’é¦ PCņØś ļ░öņØ┤ņśżņŖż ņŚŁĒĢĀ ’é¦ Max_usb_current ’é¦ Usb ņČ£ļĀź ņĀ£ĒĢ£ ļ│ĆĻ▓Į ’é¦ 600mA ’āĀ1200mA ’é¦ Hdmi_group ’é¦ 1 : CEA, 2: DMT ’é¦ Hdmi_mode=87 ’é¦ Custom mode ’é¦ Hdmi_cvt ’é¦ width, height, framerate, aspect, margins, interlace, rb max_usb_current=1 hdmi_group=2 hdmi_mode=87 hdmi_cvt=1024 600 60 6 0 0 0
- 9. http://blog.xcoda.net Raspberry-Pi Rasbian Installation ’üČ ĻĖ░ļ│ĖņäżņĀĢ ’é¦ Sudo raspi-config ’é¦ 1 Expand Filesystem ’é¦ 5 Internationalisation options ’é¦ Time Zone > Asia > Seoul ’é¦ Change Locale ’é¦ en_US.UTF-8 ’é¦ ko_KR.EUC-KR ’é¦ ko_KR.UTF-8 ’é¦ Default : en_US.UTF-8 ’é¦ sudo apt-get update ’é¦ sudo apt-get upgrade
- 10. http://blog.xcoda.net Raspberry-Pi Rasbian Installation ’üČ Static IP setup ’é¦ sudo vi /etc/dhcpcd.conf (ļ░▒ņŚģ ĒĢäņłś) ’é¦ sudo reboot ’é¦ Ifconfig eth0 ’üČ Wifi setup ’é¦ sudo iwlist wlan0 scan ’é¦ sudo vi /etc/wpa_supplicatn/wpa_supplicant.conf ’é¦ Sudo ifdown wlan0 ’é¦ Sudo ifup wlan0 ’é¦ Ifconfig wlan0 interface eth0 static ip_address=192.168.0.xx static routers=192.168.0.254 static domain_name_servers=8.8.8.8 Network={ ssid=ŌĆ£my_apŌĆØ psk=ŌĆ£my_passwordŌĆØ }
- 11. http://blog.xcoda.net Raspberry-Pi ņäĖļČĆļ¬®ņ░© 1. Introduction 2. Rasbian Installation 3. Ļ░£ļ░£ ĒÖśĻ▓Į 4. GPIO 5. Digital Output 6. Digital Input 7. Analog Output ŌĆō PWM 8. Sensor Modules 9. ADC-SPI 10. Sound 11. Camera
- 12. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ JDK ņäżņ╣ś ’é¦ Eclipse ļÅÖņ×æņØä ņ£äĒĢ┤ņä£ ĒĢäņÜö ’é¦ http://java.sun.com ’é¦ http://www.oracle.com/technetwork/java/javase/downloads/jdk8-downloads- 2133151.html
- 13. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ Eclipse ņäżņ╣ś ’é¦ http://www.eclipse.org/downloads/ ’é¦ Eclipse IDE for JavaEE Developer
- 14. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ Python ņäżņ╣ś ’é¦ https://www.python.org/downloads/release/python-2711/ ’é¦ 2.7 ļ▓äņĀä ņäżņ╣ś
- 15. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ PyDev ņäżņ╣ś ’é¦ Eclipse > Help > Eclipse Marketplace ’é¦ Python Ļ▓Ćņāē
- 16. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ PyDev setup ’é¦ Eclipse Preferences ’é¦ Pydev > Interpreters > Python Interpreter ’é¦ Quick Auto-Config
- 17. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ ĒöäļĪ£ņĀØĒŖĖ ņāØņä▒ ’é¦ New > Project ’é¦ New > PyDev Module
- 18. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ ņĮöļō£ ņ×æņä▒ ļ░Å ņŗżĒ¢ē ’é¦ ņÜ░Ēü┤ļ”Ł > Run As > Python Run print ŌĆ£Hello raspberry PiŌĆØ
- 19. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ RemoteSystem ņäżņĀĢ ’é¦ Eclipse > Window > Perspective > Open Perspective > Other
- 20. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ RemoteSystem ņäżņĀĢ ’é¦ Remote System > ņÜ░ Ēü┤ļ”Ł
- 22. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ ņøÉĻ▓® ņĀüņÜ® ’é¦ PyDev PerspectiveņŚÉņä£ ņāØņä▒ĒĢ£ ĒöäļĪ£ņĀØĒŖĖ Export ’é¦ Remote Systems > Remote File System
- 23. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ ņøÉĻ▓® ņĀüņÜ® ’é¦ Raspberry-pi ļööļĀēĒåĀļ”¼ ņäĀĒāØ
- 24. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ ņøÉĻ▓® ņĀüņÜ® ’é¦ Description file ņĀĆņן
- 25. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ ņøÉĻ▓® ņĀüņÜ® ’é¦ Synchronize ViewļĪ£ ņøÉĻ▓® ņĀüņÜ®
- 26. http://blog.xcoda.net Raspberry-Pi Ļ░£ļ░£ ĒÖśĻ▓Į ’üČ ņøÉĻ▓® ņĀüņÜ® ’é¦ Ēä░ļ»ĖļäÉļĪ£ ņĀæņåŹĒĢ┤ņä£ ņŗżĒ¢ē
- 27. http://blog.xcoda.net Raspberry-Pi ņäĖļČĆļ¬®ņ░© 1. Introduction 2. Rasbian Installation 3. Development Environment 4. GPIO 5. Digital Output 6. Digital Input 7. Analog Output ŌĆō PWM 8. Advanced I/O 9. ADC-SPI 10. Sound 11. Camera
- 29. http://blog.xcoda.net Raspberry-Pi GPIO ’üČ GPIO ņĀ£ņ¢┤ ’é¦ Sysfs ’é¦ ļ”¼ļłģņŖż ņ╗żļäÉ 2.6+ ’é¦ ĒŖ╣ņłś ĒīīņØ╝ ņŗ£ņŖżĒģ£ ’é¦ GPIO ĒżĒŖĖ ņĀ£ņ¢┤ļź╝ ņ£äĒĢ£ ļō£ļØ╝ņØ┤ļ▓ä ĒżĒĢ© ’é¦ Ēä░ļ»ĖļäÉ ņ¦üņĀæ ņĪ░ņ×æ ’é¦ System callņØä ņØ┤ņÜ®ĒĢ£ C ĒöäļĪ£ĻĘĖļלļ░Ź ’é¦ ņĀĆņłśņżĆ C ĒöäļĪ£ĻĘĖļלļ░Ź ’é¦ BCM 28xx ļĀłņ¦ĆņŖżĒä░ ņĀæĻĘ╝ ’é¦ Soc ļŹ░ņØ┤ĒāĆ ņŗ£ĒŖĖ ņ░ĖņĪ░ ’é¦ C ļØ╝ņØ┤ļĖīļ¤¼ļ”¼ ’é¦ Wiring-pi ’é¦ http://wiringpi.com/ (Gordon) ’é¦ BCM2835 ’é¦ http://www.airspayce.com/mikem/bcm2835/
- 30. http://blog.xcoda.net Raspberry-Pi GPIO ’üČ Python GPIO Modules ’é¦ Rpi.GPIO ’é¦ https://pypi.python.org/pypi/RPi.GPIO ’é¦ https://sourceforge.net/projects/raspberry-gpio-python/ (Ben Croston) ’é¦ Raspberry Pi ĻĖ░ļ│Ė ņäżņ╣ś ’é¦ ņé¼ņÜ® ņÜ®ņØ┤ ’é¦ GPIOņÖĆ Software PWMļ¦ī ņ¦ĆņøÉ ’é¦ ņŗżņŗ£Ļ░äņä▒ ņ¢┤Ēöīļ”¼ņ╝ĆņØ┤ņģśņŚÉ ļČĆņĀüĒĢ® ’é¦ WiringPi-Python ’é¦ https://github.com/WiringPi/WiringPi-Python ’é¦ Cņ¢Ėņ¢┤ļĪ£ ĻĄ¼ĒśäļÉ£ WringPiņØś wrapped version ’é¦ Arduino styleņØś ņĮöļō£ļź╝ ņ¦ĆņøÉ ’é¦ GPIO, Serial, SPI, I2C, Hardware PWM ļō▒ ĒĢśļō£ņø©ņ¢┤ ĻĖ░ļŖź ļ¬©ļæÉ ņé¼ņÜ® ’é¦ WriginPi Library ņóģņåŹņä▒ ’é¦ Raspberry-Pi build/install ĒĢäņÜö
- 31. http://blog.xcoda.net Raspberry-Pi GPIO ’üČ Sysfsļź╝ ņØ┤ņÜ®ĒĢ£ ņĮśņåö ļ¬ģļĀ╣ $ echo ŌĆ£18ŌĆØ > /sys/class/gpio/export $ ls /sys/class/gpio/ $ echo ŌĆ£outŌĆØ > /sys/class/gpio/gpio18/direction $ echo ŌĆ£1ŌĆØ > /sys/class/gpio/gpio18/value $ echo ŌĆ£0ŌĆØ > /sys/class/gpio/gpio18/value $ echo ŌĆ£18ŌĆØ > /sys/class/gpio/unexport $ ls /sys/class/gpio/
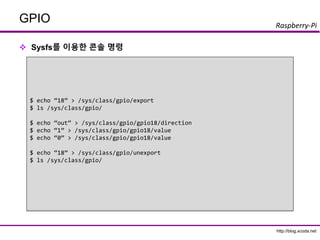
- 32. http://blog.xcoda.net Raspberry-Pi GPIO ’üČ Sysfsļź╝ ņØ┤ņÜ®ĒĢ£ C Program ŌĆō gpioled.c sprintf(buff, "/sys/class/gpio/gpio%d/direction" , gpio_pin); fd = open(buff, O_WRONLY); if (fd == -1) { perror("fail to open GPIO Direction File" ); return 1; } if (write (fd, "out" , 4) == -1) { perror("fail to set directionn" ); return 1; } close(fd); #include <stdio.h> #include <fcntl.h> #include <unistd.h> #include <string.h> int main( int argc, char **argv) { int gpio_pin = 18; int fd; char buff[BUFSIZ]; fd = open("/sys/class/gpio/export", O_WRONLY ); if (fd == -1) { perror("fail to open export." ); return 1; } sprintf(buff, "%d" , gpio_pin); if (write (fd, buff, sizeof(buff)) == -1) { perror("fail to export GPIO" ); return 1; } close(fd);
- 33. http://blog.xcoda.net Raspberry-Pi GPIO ’üČ Sysfsļź╝ ņØ┤ņÜ®ĒĢ£ C Program <Ļ│äņåŹ> fd = open("/sys/class/gpio/unexport" , O_WRONLY ); sprintf(buff, "%d" , gpio_pin); write(fd, buff, strlen(buff)); close(fd); return 0; } sprintf(buff, "/sys/class/gpio/gpio%d/value" , gpio_pin); fd = open(buff, O_WRONLY); int i=0; for(i=0; i<10; i++) { if (write (fd, "1" , sizeof("1")) == -1) { perror("fail to set value:1" ); return 1; } printf("set gpio %d value as HIGHn", gpio_pin); sleep(1); if (write (fd, "0" , sizeof("0")) == -1) { perror("fail to set value:0" ); return 1; } printf("set gpio %d value as LOWn", gpio_pin); sleep(1); } close(fd); $ gcc ŌĆōo gpioled gpioled.c $ sudo ./gpioled
- 34. http://blog.xcoda.net Raspberry-Pi GPIO ’üČ Wiring-Pi ’é¦ ņäżņ╣ś ’é¦ sudo apt-get install git-core ’é¦ Git clone git://git.drogon.net/wiringPi ’é¦ Cd wiringPi ’é¦ ./build ’é¦ Gpio ļ¬ģļĀ╣ ’é¦ wiringPiļź╝ ņäżņ╣śĒĢśļ®┤ gpio ļ¬ģļĀ╣ņØä ņé¼ņÜ®ĒĢż Ńģ£ņłś ņ׳ļŗż. $ gpio -g mode 18 out $ gpio -g write 18 1 $ gpio -g write 18 0
- 35. http://blog.xcoda.net Raspberry-Pi GPIO ’üČ LED Blink Wiring-Pi Code ’é¦ Wiringpi_led.c #include <stdio.h> #include <stdlib.h> #include <wiringPi.h> #define LED 1 // BCM18 int main( void) { puts("!!!Hello wiringPi!!!" ); /* prints !!!Hello World!!! */ int i; wiringPiSetup(); pinMode(LED, OUTPUT); for(i=0; i<10; i++){ digitalWrite(LED, HIGH); printf("pin %d HIGHn" , LED); delay(1000); digitalWrite(LED, LOW); printf("pin %d LOWn" , LED); delay(1000); } return EXIT_SUCCESS; } $ gcc ŌĆōo wiringpi_led wiringpi_led.c ŌĆōlwiringPi $ sudo ./wiringpi_led
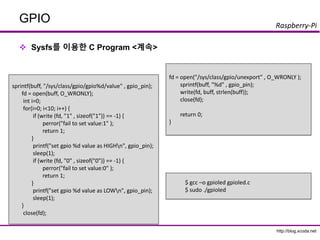
- 36. http://blog.xcoda.net Raspberry-Pi GPIO ’üČ Rpi.GPIO ĻĖ░ļ│Ė ĒĢ©ņłś ’é¦ import Rpi.GPIO as GPIO ’é¦ ļ¬©ļōł import ’é¦ GPIO.setmode(GPIO.BCM or GPIO.BOARD) ’é¦ GPIO.BCM : Broadcom SocņŚÉņä£ ņĀĢņØśĒĢ£ ļ▓łĒśĖ ’é¦ GPIO.BOARD : ļ│┤ļō£ņŚÉ ĒĢĆ ņł£ļ▓ł ’é¦ GPIO.setup(channel, direction[, intial=state] ) ’é¦ channel : GPIO Pin ļ▓łĒśĖ ’é¦ direction : GPIO.IN, GPIO.OUT ’é¦ state : GPIO.HIGH, GPIO.LOW ’é¦ GPIO.setup(channel, GPIO.IN [, pull_up_down=pud]) ’é¦ pud = GPIO.PUD_UP, GPIO.PUD_DOWN ’é¦ GPIO.input(channel) ’é¦ GPIO.output(channel, state) ’é¦ GPIO.cleanup() ’é¦ ņóģļŻīņĀäņŚÉ ņ×ÉņøÉ ļ░śļé® ’é¦ https://sourceforge.net/p/raspberry-gpio-python/wiki/Examples/
- 37. http://blog.xcoda.net Raspberry-Pi ņäĖļČĆļ¬®ņ░© 1. Introduction 2. Rasbian Installation 3. Development Environment 4. GPIO 5. Digital Output 6. Digital Input 7. Analog Output ŌĆō PWM 8. Sensor Modules 9. ADC-SPI 10. Sound 11. Camera
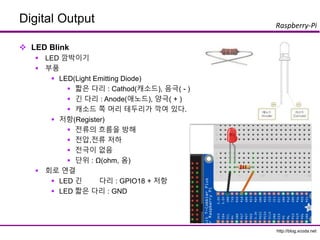
- 38. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ LED Blink ’é¦ LED Ļ╣£ļ░ĢņØ┤ĻĖ░ ’é¦ ļČĆĒÆł ’é¦ LED(Light Emitting Diode) ’é¦ ņ¦¦ņØĆ ļŗżļ”¼ : Cathod(ņ║Éņåīļō£), ņØīĻĘ╣( - ) ’é¦ ĻĖ┤ ļŗżļ”¼ : Anode(ņĢĀļģĖļō£), ņ¢æĻĘ╣( + ) ’é¦ ņ║Éņåīļō£ ņ¬Į ļ©Ėļ”¼ ĒģīļæÉļ”¼Ļ░Ć Ļ╣ŹņŚ¼ ņ׳ļŗż. ’é¦ ņĀĆĒĢŁ(Register) ’é¦ ņĀäļźśņØś ĒØÉļ”äņØä ļ░®ĒĢ┤ ’é¦ ņĀäņĢĢ,ņĀäļźś ņĀĆĒĢś ’é¦ ņĀäĻĘ╣ņØ┤ ņŚåņØī ’é¦ ļŗ©ņ£ä : Ōä”(ohm, ņś┤) ’é¦ ĒÜīļĪ£ ņŚ░Ļ▓░ ’é¦ LED ĻĖ┤ ļŗżļ”¼ : GPIO18 + ņĀĆĒĢŁ ’é¦ LED ņ¦¦ņØĆ ļŗżļ”¼ : GND
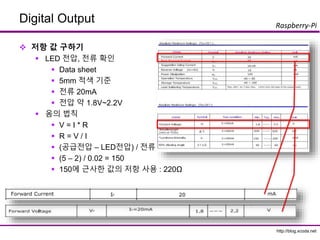
- 39. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ ņĀĆĒĢŁ Ļ░Æ ĻĄ¼ĒĢśĻĖ░ ’é¦ LED ņĀäņĢĢ, ņĀäļźś ĒÖĢņØĖ ’é¦ Data sheet ’é¦ 5mm ņĀüņāē ĻĖ░ņżĆ ’é¦ ņĀäļźś 20mA ’é¦ ņĀäņĢĢ ņĢĮ 1.8V~2.2V ’é¦ ņś┤ņØś ļ▓Ģņ╣Ö ’é¦ V = I * R ’é¦ R = V / I ’é¦ (Ļ│ĄĻĖēņĀäņĢĢ ŌĆō LEDņĀäņĢĢ) / ņĀäļźś ’é¦ (5 ŌĆō 2) / 0.02 = 150 ’é¦ 150ņŚÉ ĻĘ╝ņé¼ĒĢ£ Ļ░ÆņØś ņĀĆĒĢŁ ņé¼ņÜ® : 220Ōä”
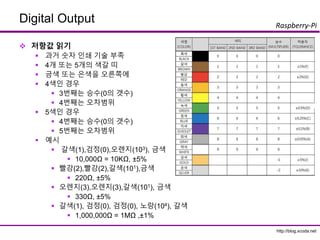
- 40. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ ņĀĆĒĢŁĻ░Æ ņØĮĻĖ░ ’é¦ Ļ│╝Ļ▒░ ņł½ņ×É ņØĖņćä ĻĖ░ņłĀ ļČĆņĪ▒ ’é¦ 4Ļ░£ ļśÉļŖö 5Ļ░£ņØś ņāēĻ░ł ļØĀ ’é¦ ĻĖłņāē ļśÉļŖö ņØĆņāēņØä ņśżļźĖņ¬ĮņŚÉ ’é¦ 4ņāēņØĖ Ļ▓ĮņÜ░ ’é¦ 3ļ▓łņ¦ĖļŖö ņŖ╣ņłś(0ņØś Ļ░»ņłś) ’é¦ 4ļ▓łņ¦ĖļŖö ņśżņ░©ļ▓öņ£ä ’é¦ 5ņāēņØĖ Ļ▓ĮņÜ░ ’é¦ 4ļ▓łņ¦ĖļŖö ņŖ╣ņłś(0ņØś Ļ░»ņłś) ’é¦ 5ļ▓łņ¦ĖļŖö ņśżņ░©ļ▓öņ£ä ’é¦ ņśłņŗ£ ’é¦ Ļ░łņāē(1),Ļ▓ĆņĀĢ(0),ņśżļĀīņ¦Ć(103), ĻĖłņāē ’é¦ 10,000Ōä” = 10KŌä”, ┬▒5% ’é¦ ļ╣©Ļ░Ģ(2),ļ╣©Ļ░Ģ(2),Ļ░łņāē(101),ĻĖłņāē ’é¦ 220Ōä”, ┬▒5% ’é¦ ņśżļĀīņ¦Ć(3),ņśżļĀīņ¦Ć(3),Ļ░łņāē(101), ĻĖłņāē ’é¦ 330Ōä”, ┬▒5% ’é¦ Ļ░łņāē(1), Ļ▓ĆņĀĢ(0), Ļ▓ĆņĀĢ(0), ļģĖļ×æ(104), Ļ░łņāē ’é¦ 1,000,000Ōä” = 1MŌä” ,┬▒1%
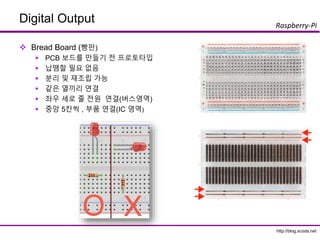
- 41. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ Bread Board (ļ╣ĄĒīÉ) ’é¦ PCB ļ│┤ļō£ļź╝ ļ¦īļōżĻĖ░ ņĀä ĒöäļĪ£ĒåĀĒāĆņ×ģ ’é¦ ļé®ļĢ£ĒĢĀ ĒĢäņÜö ņŚåņØī ’é¦ ļČäļ”¼ ļ░Å ņ×¼ņĪ░ļ”Į Ļ░ĆļŖź ’é¦ Ļ░ÖņØĆ ņŚ┤ļü╝ļ”¼ ņŚ░Ļ▓░ ’é¦ ņóīņÜ░ ņäĖļĪ£ ņżä ņĀäņøÉ ņŚ░Ļ▓░(ļ▓äņŖżņśüņŚŁ) ’é¦ ņżæņĢÖ 5ņ╣Ėņö® , ļČĆĒÆł ņŚ░Ļ▓░(IC ņśüņŚŁ)
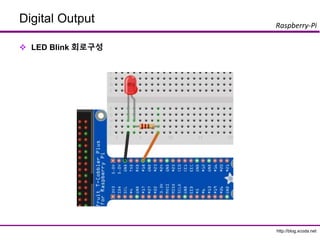
- 42. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ LED Blink ąļīļĪ£ĻĄ¼ņä▒
- 43. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ LED Blink Python Code import RPi.GPIO as GPIO import time led_pin = 18 try: GPIO.setmode(GPIO.BCM) GPIO.setup(led_pin, GPIO.OUT) while True: GPIO.output(led_pin, True) time.sleep(0.5) GPIO.output(led_pin, False) time.sleep(0.5) finally: print 'clean up' GPIO.cleanup()
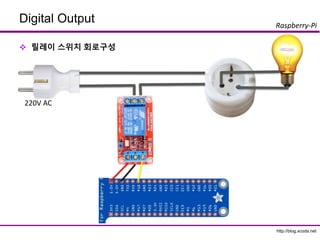
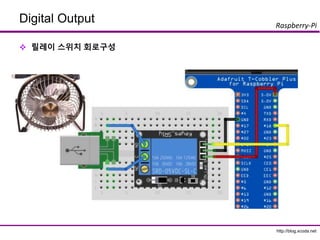
- 44. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ ļ”┤ļĀłņØ┤ ņŖżņ£äņ╣ś ’é¦ 220V Ļ░ĆņĀäņĀ£ĒÆł ņ╝£Ļ│Ā ļüäĻĖ░ ’é¦ ļ│┤ļō£ņØś 5V ņĀäņøÉ ņĀ£ņ¢┤ ņØ┤ņÖĖ Ļ░ĆņĀäņĀ£ĒÆł ’é¦ ĒĢäņÜö ļČĆĒÆł ’é¦ ļ”┤ļĀłņØ┤ ņŖżņ£äņ╣ś ’é¦ IN, 5V, GND ’é¦ ļ¼┤ņĀæņĀÉ ļ░śļÅäņ▓┤ ļ”┤ļĀłņØ┤ ’é¦ IN, GND ’é¦ 220V Ēöīļ¤¼ĻĘĖ ņĢö/ņłś
- 45. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ ļ”┤ļĀłņØ┤ ņŖżņ£äņ╣ś ąļīļĪ£ĻĄ¼ņä▒ 220V AC
- 46. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ ļ”┤ļĀłņØ┤ ņŖżņ£äņ╣ś ąļīļĪ£ĻĄ¼ņä▒
- 47. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ ļ”┤ļĀłņØ┤ ņŖżņ£äņ╣ś Code ’é¦ LED BlinkņÖĆ ļÅÖņØ╝ import RPi.GPIO as GPIO import time fan_pin = 18 try: GPIO.setmode(GPIO.BCM) GPIO.setup(fan_pin, GPIO.OUT) while True: val = input("1:on, 0:off") GPIO.output(fan_pin, val) finally: print 'clean up' GPIO.cleanup()
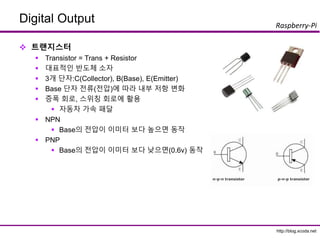
- 48. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ ĒŖĖļ×£ņ¦ĆņŖżĒä░ ’é¦ Transistor = Trans + Resistor ’é¦ ļīĆĒæ£ņĀüņØĖ ļ░śļÅäņ▓┤ ņåīņ×É ’é¦ 3Ļ░£ ļŗ©ņ×É:C(Collector), B(Base), E(Emitter) ’é¦ Base ļŗ©ņ×É ņĀäļźś(ņĀäņĢĢ)ņŚÉ ļö░ļØ╝ ļé┤ļČĆ ņĀĆĒĢŁ ļ│ĆĒÖö ’é¦ ņ”ØĒÅŁ ĒÜīļĪ£, ņŖżņ£äņ╣Ł ĒÜīļĪ£ņŚÉ ĒÖ£ņÜ® ’é¦ ņ×ÉļÅÖņ░© Ļ░ĆņåŹ Ēī©ļŗ¼ ’é¦ NPN ’é¦ BaseņØś ņĀäņĢĢņØ┤ ņØ┤ļ»ĖĒä░ ļ│┤ļŗż ļåÆņ£╝ļ®┤ ļÅÖņ×æ ’é¦ PNP ’é¦ BaseņØś ņĀäņĢĢņØ┤ ņØ┤ļ»ĖĒä░ ļ│┤ļŗż ļé«ņ£╝ļ®┤(0.6v) ļÅÖņ×æ
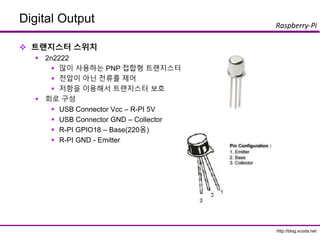
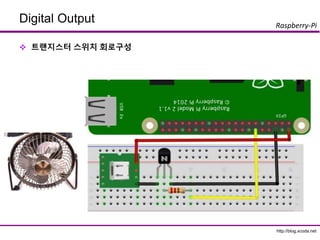
- 49. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ ĒŖĖļ×£ņ¦ĆņŖżĒä░ ņŖżņ£äņ╣ś ’é¦ 2n2222 ’é¦ ļ¦ÄņØ┤ ņé¼ņÜ®ĒĢśļŖö PNP ņĀæĒĢ®ĒśĢ ĒŖĖļ×£ņ¦ĆņŖżĒä░ ’é¦ ņĀäņĢĢņØ┤ ņĢäļŗī ņĀäļźśļź╝ ņĀ£ņ¢┤ ’é¦ ņĀĆĒĢŁņØä ņØ┤ņÜ®ĒĢ┤ņä£ ĒŖĖļ×£ņ¦ĆņŖżĒä░ ļ│┤ĒśĖ ’é¦ ĒÜīļĪ£ ĻĄ¼ņä▒ ’é¦ USB Connector Vcc ŌĆō R-PI 5V ’é¦ USB Connector GND ŌĆō Collector ’é¦ R-PI GPIO18 ŌĆō Base(220ņś┤) ’é¦ R-PI GND - Emitter
- 50. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ ĒŖĖļ×£ņ¦ĆņŖżĒä░ ņŖżņ£äņ╣ś ąļīļĪ£ĻĄ¼ņä▒
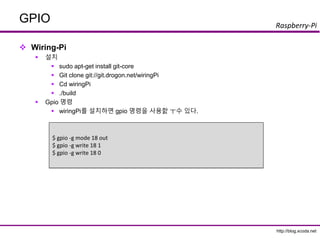
- 51. http://blog.xcoda.net Raspberry-Pi Digital Output ’üČ ĒŖĖļ×£ņ¦ĆņŖżĒä░ ņŖżņ£äņ╣ś Code ’é¦ LED BlinkņÖĆ ļÅÖņØ╝ pin = 18 try: GPIO.setmode(GPIO.BCM) GPIO.setup(pin, GPIO.OUT) while True: val = input("swtich [on:1, off:0]") GPIO.output(pin, val) finally: print 'clean up' GPIO.cleanup()
- 52. http://blog.xcoda.net Raspberry-Pi ņäĖļČĆļ¬®ņ░© 1. Introduction 2. Rasbian Installation 3. Development Environment 4. GPIO 5. Digital Output 6. Digital Input 7. Analog Output ŌĆō PWM 8. Sensor Modules 9. ADC-SPI 10. Sound 11. Camera
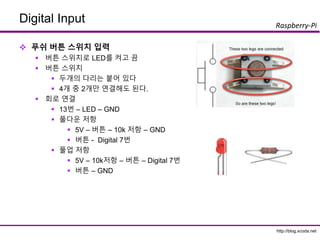
- 53. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ ĒæĖņē¼ ļ▓äĒŖ╝ ņŖżņ£äņ╣ś ņ×ģļĀź ’é¦ ļ▓äĒŖ╝ ņŖżņ£äņ╣śļĪ£ LEDļź╝ ņ╝£Ļ│Ā ļüö ’é¦ ļ▓äĒŖ╝ ņŖżņ£äņ╣ś ’é¦ ļæÉĻ░£ņØś ļŗżļ”¼ļŖö ļČÖņ¢┤ ņ׳ļŗż ’é¦ 4Ļ░£ ņżæ 2Ļ░£ļ¦ī ņŚ░Ļ▓░ĒĢ┤ļÅä ļÉ£ļŗż. ’é¦ ĒÜīļĪ£ ņŚ░Ļ▓░ ’é¦ 13ļ▓ł ŌĆō LED ŌĆō GND ’é¦ ĒÆĆļŗżņÜ┤ ņĀĆĒĢŁ ’é¦ 5V ŌĆō ļ▓äĒŖ╝ ŌĆō 10k ņĀĆĒĢŁ ŌĆō GND ’é¦ ļ▓äĒŖ╝ - Digital 7ļ▓ł ’é¦ ĒÆĆņŚģ ņĀĆĒĢŁ ’é¦ 5V ŌĆō 10kņĀĆĒĢŁ ŌĆō ļ▓äĒŖ╝ ŌĆō Digital 7ļ▓ł ’é¦ ļ▓äĒŖ╝ ŌĆō GND
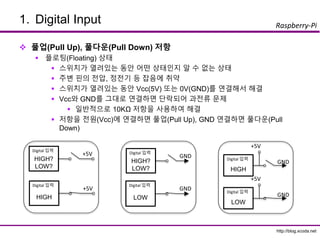
- 54. http://blog.xcoda.net Raspberry-Pi 1. Digital Input ’üČ ĒÆĆņŚģ(Pull Up), ĒÆĆļŗżņÜ┤(Pull Down) ņĀĆĒĢŁ ’é¦ ĒöīļĪ£Ēīģ(Floating) ņāüĒā£ ’é¦ ņŖżņ£äņ╣śĻ░Ć ņŚ┤ļĀżņ׳ļŖö ļÅÖņĢł ņ¢┤ļ¢ż ņāüĒā£ņØĖņ¦Ć ņĢī ņłś ņŚåļŖö ņāüĒā£ ’é¦ ņŻ╝ļ│Ć ĒĢĆņØś ņĀäņĢĢ, ņĀĢņĀäĻĖ░ ļō▒ ņ×ĪņØīņŚÉ ņĘ©ņĢĮ ’é¦ ņŖżņ£äņ╣śĻ░Ć ņŚ┤ļĀżņ׳ļŖö ļÅÖņĢł Vcc(5V) ļśÉļŖö 0V(GND)ļź╝ ņŚ░Ļ▓░ĒĢ┤ņä£ ĒĢ┤Ļ▓░ ’é¦ VccņÖĆ GNDļź╝ ĻĘĖļīĆļĪ£ ņŚ░Ļ▓░ĒĢśļ®┤ ļŗ©ļØĮļÉśņ¢┤ Ļ│╝ņĀäļźś ļ¼ĖņĀ£ ’é¦ ņØ╝ļ░śņĀüņ£╝ļĪ£ 10KŌä” ņĀĆĒĢŁņØä ņé¼ņÜ®ĒĢśņŚ¼ ĒĢ┤Ļ▓░ ’é¦ ņĀĆĒĢŁņØä ņĀäņøÉ(Vcc)ņŚÉ ņŚ░Ļ▓░ĒĢśļ®┤ ĒÆĆņŚģ(Pull Up), GND ņŚ░Ļ▓░ĒĢśļ®┤ ĒÆĆļŗżņÜ┤(Pull Down) HIGH? LOW? +5V Digital ņ×ģļĀź HIGH +5V Digital ņ×ģļĀź HIGH? LOW? GND Digital ņ×ģļĀź LOW GND Digital ņ×ģļĀź LOW GND Digital ņ×ģļĀź +5V HIGH GND Digital ņ×ģļĀź +5V
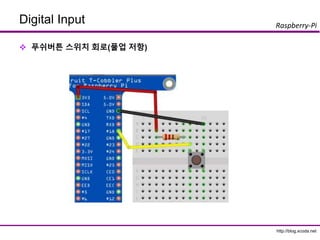
- 55. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ ĒæĖņē¼ļ▓äĒŖ╝ ņŖżņ£äņ╣ś ĒÜīļĪ£(ĒÆĆņŚģ ņĀĆĒĢŁ)
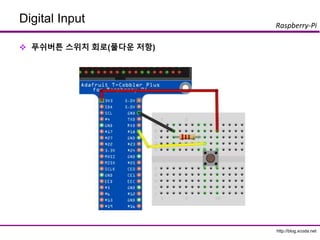
- 56. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ ĒæĖņē¼ļ▓äĒŖ╝ ņŖżņ£äņ╣ś ĒÜīļĪ£(ĒÆĆļŗżņÜ┤ ņĀĆĒĢŁ)
- 57. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ ĒæĖņē¼ļ▓äĒŖ╝ ņŖżņ£äņ╣ś Code import RPi.GPIO as GPIO pin = 18 try: GPIO.setmode(GPIO.BCM) GPIO.setup(pin, GPIO.IN) while True: print GPIO.input(pin) finally: GPIO.cleanup()
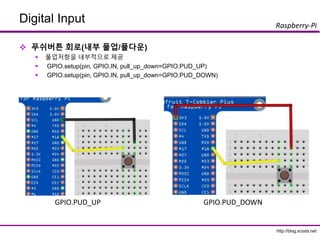
- 58. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ ĒæĖņē¼ļ▓äĒŖ╝ ĒÜīļĪ£(ļé┤ļČĆ ĒÆĆņŚģ/ĒÆĆļŗżņÜ┤) ’é¦ ĒÆĆņŚģņĀĆĒĢŁņØä ļé┤ļČĆņĀüņ£╝ļĪ£ ņĀ£Ļ│Ą ’é¦ GPIO.setup(pin, GPIO.IN, pull_up_down=GPIO.PUD_UP) ’é¦ GPIO.setup(pin, GPIO.IN, pull_up_down=GPIO.PUD_DOWN) GPIO.PUD_UP GPIO.PUD_DOWN
- 59. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ ĒæĖņē¼ļ▓äĒŖ╝ ņŖżņ£äņ╣ś ļé┤ļČĆ ĒÆĆņŚģ/ļŗżņÜ┤ Code import RPi.GPIO as GPIO pin = 18 try: GPIO.setmode(GPIO.BCM) #GPIO.setup(pin, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(pin, GPIO.IN, pull_up_down=GPIO.PUD_DOWN) while True: print GPIO.input(pin) finally: GPIO.cleanup()
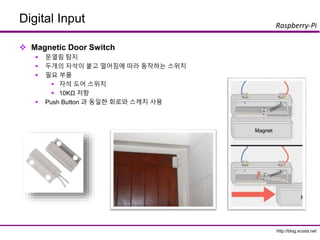
- 60. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ Magnetic Door Switch ’é¦ ļ¼ĖņŚ┤ļ”╝ ĒāÉņ¦Ć ’é¦ ļæÉĻ░£ņØś ņ×ÉņäØņØ┤ ļČÖĻ│Ā ļ¢©ņ¢┤ņ¦ÉņŚÉ ļö░ļØ╝ ļÅÖņ×æĒĢśļŖö ņŖżņ£äņ╣ś ’é¦ ĒĢäņÜö ļČĆĒÆł ’é¦ ņ×ÉņäØ ļÅäņ¢┤ ņŖżņ£äņ╣ś ’é¦ 10KŌä” ņĀĆĒĢŁ ’é¦ Push Button Ļ│╝ ļÅÖņØ╝ĒĢ£ ĒÜīļĪ£ņÖĆ ņŖżņ╝Ćņ╣ś ņé¼ņÜ®
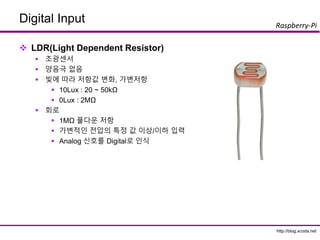
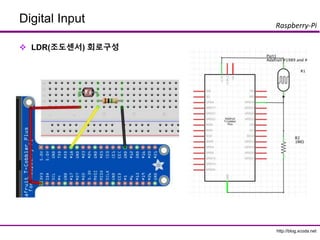
- 61. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ LDR(Light Dependent Resistor) ’é¦ ņĪ░Ļ┤æņä╝ņä£ ’é¦ ņ¢æņØīĻĘ╣ ņŚåņØī ’é¦ ļ╣øņŚÉ ļö░ļØ╝ ņĀĆĒĢŁĻ░Æ ļ│ĆĒÖö, Ļ░Ćļ│ĆņĀĆĒĢŁ ’é¦ 10Lux : 20 ~ 50kŌä” ’é¦ 0Lux : 2MŌä” ’é¦ ĒÜīļĪ£ ’é¦ 1MŌä” ĒÆĆļŗżņÜ┤ ņĀĆĒĢŁ ’é¦ Ļ░Ćļ│ĆņĀüņØĖ ņĀäņĢĢņØś ĒŖ╣ņĀĢ Ļ░Æ ņØ┤ņāü/ņØ┤ĒĢś ņ×ģļĀź ’é¦ Analog ņŗĀĒśĖļź╝ DigitalļĪ£ ņØĖņŗØ
- 63. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ LDR(ņĪ░ļÅäņä╝ņä£) Code import RPi.GPIO as GPIO import time try: pin = 18 GPIO.setmode(GPIO.BCM) GPIO.setup(pin, GPIO.IN) val = -1 while True: read = GPIO.input(pin) if read != val: val = read print time.strftime("%Y%m%d-%H%M%S"), val #time.sleep(0.1) finally: print "clean up." GPIO.cleanup()
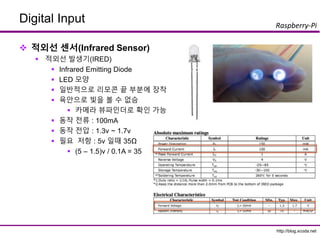
- 64. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ ņĀüņÖĖņäĀ ņä╝ņä£(Infrared Sensor) ’é¦ ņĀüņÖĖņäĀ ļ░£ņāØĻĖ░(IRED) ’é¦ Infrared Emitting Diode ’é¦ LED ļ¬©ņ¢æ ’é¦ ņØ╝ļ░śņĀüņ£╝ļĪ£ ļ”¼ļ¬©ņĮś ļüØ ļČĆļČäņŚÉ ņןņ░® ’é¦ ņ£ĪņĢłņ£╝ļĪ£ ļ╣øņØä ļ│╝ ņłś ņŚåņŖ┤ ’é¦ ņ╣┤ļ®öļØ╝ ļĘ░ĒīīņØĖļŹöļĪ£ ĒÖĢņØĖ Ļ░ĆļŖź ’é¦ ļÅÖņ×æ ņĀäļźś : 100mA ’é¦ ļÅÖņ×æ ņĀäņĢĢ : 1.3v ~ 1.7v ’é¦ ĒĢäņÜö ņĀĆĒĢŁ : 5v ņØ╝ļĢī 35Ōä” ’é¦ (5 ŌĆō 1.5)v / 0.1A = 35
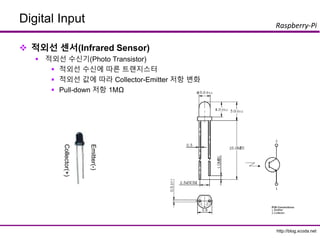
- 65. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ ņĀüņÖĖņäĀ ņä╝ņä£(Infrared Sensor) ’é¦ ņĀüņÖĖņäĀ ņłśņŗĀĻĖ░(Photo Transistor) ’é¦ ņĀüņÖĖņäĀ ņłśņŗĀņŚÉ ļö░ļźĖ ĒŖĖļ×£ņ¦ĆņŖżĒä░ ’é¦ ņĀüņÖĖņäĀ Ļ░ÆņŚÉ ļö░ļØ╝ Collector-Emitter ņĀĆĒĢŁ ļ│ĆĒÖö ’é¦ Pull-down ņĀĆĒĢŁ 1MŌä”Emitter(-) Collector(+)
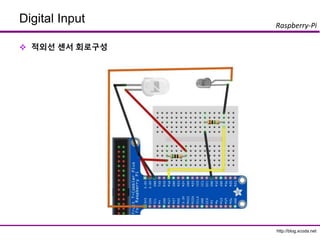
- 66. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ ņĀüņÖĖņäĀ ņä╝ņä£ ąļīļĪ£ĻĄ¼ņä▒
- 67. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ ņĀüņÖĖņäĀ ņä╝ņä£ Code import RPi.GPIO as GPIO import time try: pin = 18 GPIO.setmode(GPIO.BCM) GPIO.setup(pin, GPIO.IN) val = -1 while True: read = GPIO.input(pin) if read != val: val = read print time.strftime("%Y%m%d-%H%M%S"), val #time.sleep(0.1) finally: print "clean up." GPIO.cleanup()
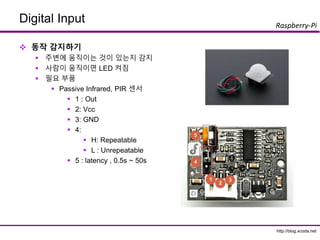
- 68. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ ļÅÖņ×æ Ļ░Éņ¦ĆĒĢśĻĖ░ ’é¦ ņŻ╝ļ│ĆņŚÉ ņøĆņ¦üņØ┤ļŖö Ļ▓āņØ┤ ņ׳ļŖöņ¦Ć Ļ░Éņ¦Ć ’é¦ ņé¼ļ×īņØ┤ ņøĆņ¦üņØ┤ļ®┤ LED ņ╝£ņ¦É ’é¦ ĒĢäņÜö ļČĆĒÆł ’é¦ Passive Infrared, PIR ņä╝ņä£ ’é¦ 1 : Out ’é¦ 2: Vcc ’é¦ 3: GND ’é¦ 4: ’é¦ H: Repeatable ’é¦ L : Unrepeatable ’é¦ 5 : latency , 0.5s ~ 50s
- 69. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ PIR ņä╝ņä£ Code import RPi.GPIO as GPIO import time from datetime import datetime pri_pin = 18 try: GPIO.setmode(GPIO.BCM) GPIO.setup(pri_pin, GPIO.IN) val = -1 while True: read = GPIO.input(pri_pin) if val != read: val = read if val== 0: print str(datetime.now()), "No intruder" elif val == 1: print str(datetime.now()), "Intruder dectected" time.sleep(0.5) finally: print 'clean up' GPIO.cleanup()
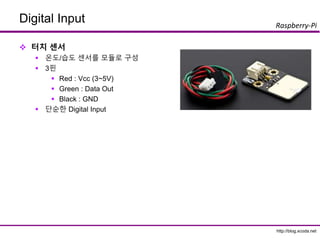
- 70. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ Ēä░ņ╣ś ņä╝ņä£ ’é¦ ņś©ļÅä/ņŖĄļÅä ņä╝ņä£ļź╝ ļ¬©ļōłļĪ£ ĻĄ¼ņä▒ ’é¦ 3ĒĢĆ ’é¦ Red : Vcc (3~5V) ’é¦ Green : Data Out ’é¦ Black : GND ’é¦ ļŗ©ņł£ĒĢ£ Digital Input
- 71. http://blog.xcoda.net Raspberry-Pi Digital Input ’üČ Ēä░ņ╣ś ņä╝ņä£ Code import time import datetime import RPi.GPIO as GPIO GPIO.setmode(GPIO.BCM) pad_pin = 5 GPIO.setup(pad_pin, GPIO.IN) while True: pad_pressed = GPIO.input(pad_pin) if pad_pressed: current_datetime = datetime.datetime.now().strftime("%I:%M%p:%S on %B %d, %Y") print("pressed! - " + current_datetime) time.sleep(0.1)
- 72. http://blog.xcoda.net Raspberry-Pi ņäĖļČĆļ¬®ņ░© 1. Introduction 2. Rasbian Installation 3. Development Environment 4. GPIO 5. Digital Output 6. Digital Input 7. Analog Output ŌĆō PWM 8. Sensor Modules 9. ADC-SPI 10. Sound 11. Camera
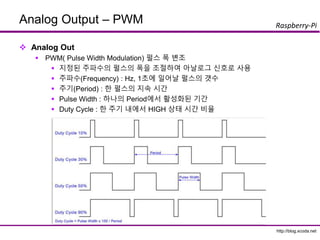
- 73. http://blog.xcoda.net Raspberry-Pi Analog Output ŌĆō PWM ’üČ Analog Out ’é¦ PWM( Pulse Width Modulation) ĒÄäņŖż ĒÅŁ ļ│ĆņĪ░ ’é¦ ņ¦ĆņĀĢļÉ£ ņŻ╝ĒīīņłśņØś ĒÄäņŖżņØś ĒÅŁņØä ņĪ░ņĀłĒĢśņŚ¼ ņĢäļéĀļĪ£ĻĘĖ ņŗĀĒśĖļĪ£ ņé¼ņÜ® ’é¦ ņŻ╝Ēīīņłś(Frequency) : Hz, 1ņ┤łņŚÉ ņØ╝ņ¢┤ļéĀ ĒÄäņŖżņØś Ļ░»ņłś ’é¦ ņŻ╝ĻĖ░(Period) : ĒĢ£ ĒÄäņŖżņØś ņ¦ĆņåŹ ņŗ£Ļ░ä ’é¦ Pulse Width : ĒĢśļéśņØś PeriodņŚÉņä£ ĒÖ£ņä▒ĒÖöļÉ£ ĻĖ░Ļ░ä ’é¦ Duty Cycle : ĒĢ£ ņŻ╝ĻĖ░ ļé┤ņŚÉņä£ HIGH ņāüĒā£ ņŗ£Ļ░ä ļ╣äņ£©
- 74. http://blog.xcoda.net Raspberry-Pi Analog Output ŌĆō PWM ’üČ Analog Out ’é¦ Raspberry-Pi PWM ’é¦ Hardware PWM : BCM2835 SoC ’é¦ ļĀłņ¦ĆņŖżĒä░ AL0 ’é¦ GPIO12,13 ŌĆō PWM0, PWM1 ’é¦ ļĀłņ¦ĆņŖżĒä░ AL1 ’é¦ GPIO18, 19 ŌĆō PWM0, PWM1 ’é¦ Software PWM : Wiring-Pi Libarary ’é¦ GPIO ņĀ£ĒĢ£ ņŚåņŖ┤ ’é¦ ņĀĢĒÖĢļÅä ļ¢©ņ¢┤ņ¦É ’é¦ LED Fading ’é¦ GPIO18
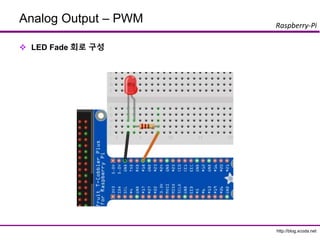
- 75. http://blog.xcoda.net Raspberry-Pi Analog Output ŌĆō PWM ’üČ LED Fade ĒÜīļĪ£ ĻĄ¼ņä▒
- 76. http://blog.xcoda.net Raspberry-Pi Analog Output ŌĆō PWM ’üČ LED Fade Code import RPi.GPIO as GPIO import time try: pin = 26 GPIO.setmode(GPIO.BCM) GPIO.setup(pin, GPIO.OUT) pwm = GPIO.PWM(pin, 100) pwm.start(0) while True: for i in range(0, 101): pwm.ChangeDutyCycle(i) time.sleep(0.05) for i in range(100, -1, -1): pwm.ChangeDutyCycle(i) time.sleep(0.05) finally: pwm.stop() GPIO.cleanup()
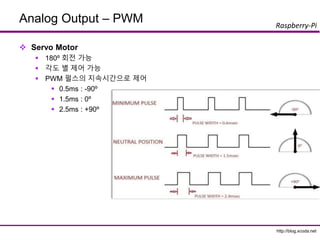
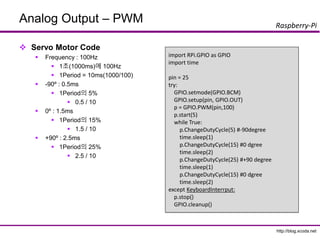
- 77. http://blog.xcoda.net Raspberry-Pi Analog Output ŌĆō PWM ’üČ Servo Motor ’é¦ 180┬║ ĒÜīņĀä Ļ░ĆļŖź ’é¦ Ļ░üļÅä ļ│ä ņĀ£ņ¢┤ Ļ░ĆļŖź ’é¦ PWM ĒÄäņŖżņØś ņ¦ĆņåŹņŗ£Ļ░äņ£╝ļĪ£ ņĀ£ņ¢┤ ’é¦ 0.5ms : -90┬║ ’é¦ 1.5ms : 0┬║ ’é¦ 2.5ms : +90┬║
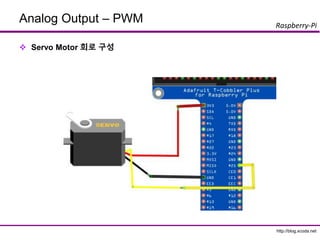
- 78. http://blog.xcoda.net Raspberry-Pi Analog Output ŌĆō PWM ’üČ Servo Motor ĒÜīļĪ£ ĻĄ¼ņä▒
- 79. http://blog.xcoda.net Raspberry-Pi Analog Output ŌĆō PWM ’üČ Servo Motor Code ’é¦ Frequency : 100Hz ’é¦ 1ņ┤ł(1000ms)ņŚÉ 100Hz ’é¦ 1Period = 10ms(1000/100) ’é¦ -90┬║ : 0.5ms ’é¦ 1PeriodņØś 5% ’é¦ 0.5 / 10 ’é¦ 0┬║ : 1.5ms ’é¦ 1PeriodņØś 15% ’é¦ 1.5 / 10 ’é¦ +90┬║ : 2.5ms ’é¦ 1PeriodņØś 25% ’é¦ 2.5 / 10 import RPi.GPIO as GPIO import time pin = 25 try: GPIO.setmode(GPIO.BCM) GPIO.setup(pin, GPIO.OUT) p = GPIO.PWM(pin,100) p.start(5) while True: p.ChangeDutyCycle(5) #-90degree time.sleep(1) p.ChangeDutyCycle(15) #0 dgree time.sleep(2) p.ChangeDutyCycle(25) #+90 degree time.sleep(1) p.ChangeDutyCycle(15) #0 dgree time.sleep(2) except KeyboardInterrput: p.stop() GPIO.cleanup()
- 80. http://blog.xcoda.net Raspberry-Pi ņäĖļČĆļ¬®ņ░© 1. Introduction 2. Rasbian Installation 3. Development Environment 4. GPIO 5. Digital Output 6. Digital Input 7. Analog Output ŌĆō PWM 8. Sensor Modules 9. ADC-SPI 10. Sound 11. Camera
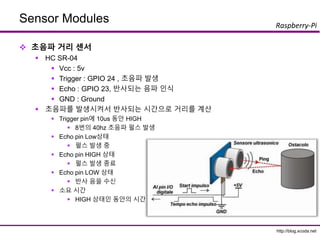
- 81. http://blog.xcoda.net Raspberry-Pi Sensor Modules ’üČ ņ┤łņØīĒīī Ļ▒░ļ”¼ ņä╝ņä£ ’é¦ HC SR-04 ’é¦ Vcc : 5v ’é¦ Trigger : GPIO 24 , ņ┤łņØīĒīī ļ░£ņāØ ’é¦ Echo : GPIO 23, ļ░śņé¼ļÉśļŖö ņØīĒīī ņØĖņŗØ ’é¦ GND : Ground ’é¦ ņ┤łņØīĒīīļź╝ ļ░£ņāØņŗ£ņ╝£ņä£ ļ░śņé¼ļÉśļŖö ņŗ£Ļ░äņ£╝ļĪ£ Ļ▒░ļ”¼ļź╝ Ļ│äņé░ ’é¦ Trigger pinņŚÉ 10us ļÅÖņĢł HIGH ’é¦ 8ļ▓łņØś 40hz ņ┤łņØīĒīī ĒÄäņŖż ļ░£ņāØ ’é¦ Echo pin LowņāüĒā£ ’é¦ ĒÄäņŖż ļ░£ņāØ ņżæ ’é¦ Echo pin HIGH ņāüĒā£ ’é¦ ĒÄäņŖż ļ░£ņāØ ņóģļŻī ’é¦ Echo pin LOW ņāüĒā£ ’é¦ ļ░śņé¼ ņØīņØä ņłśņŗĀ ’é¦ ņåīņÜö ņŗ£Ļ░ä ’é¦ HIGH ņāüĒā£ņØĖ ļÅÖņĢłņØś ņŗ£Ļ░ä
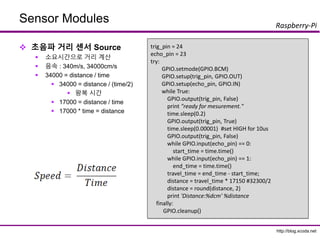
- 82. http://blog.xcoda.net Raspberry-Pi Sensor Modules ’üČ ņ┤łņØīĒīī Ļ▒░ļ”¼ ņä╝ņä£ Source ’é¦ ņåīņÜöņŗ£Ļ░äņ£╝ļĪ£ Ļ▒░ļ”¼ Ļ│äņé░ ’é¦ ņØīņåŹ : 340m/s, 34000cm/s ’é¦ 34000 = distance / time ’é¦ 34000 = distance / (time/2) ’é¦ ņÖĢļ│Ą ņŗ£Ļ░ä ’é¦ 17000 = distance / time ’é¦ 17000 * time = distance trig_pin = 24 echo_pin = 23 try: GPIO.setmode(GPIO.BCM) GPIO.setup(trig_pin, GPIO.OUT) GPIO.setup(echo_pin, GPIO.IN) while True: GPIO.output(trig_pin, False) print "ready for mesurement." time.sleep(0.2) GPIO.output(trig_pin, True) time.sleep(0.00001) #set HIGH for 10us GPIO.output(trig_pin, False) while GPIO.input(echo_pin) == 0: start_time = time.time() while GPIO.input(echo_pin) == 1: end_time = time.time() travel_time = end_time - start_time; distance = travel_time * 17150 #32300/2 distance = round(distance, 2) print 'Distance:%dcm' %distance finally: GPIO.cleanup()
- 83. http://blog.xcoda.net Raspberry-Pi Sensor Modules ’üČ DHT-11 ņś©ļÅä/ņŖĄļÅä ļ¬©ļōł ’é¦ ņś©ļÅä/ņŖĄļÅä ņä╝ņä£ļź╝ ļ¬©ļōłļĪ£ ĻĄ¼ņä▒ ’é¦ 3ĒĢĆ ’é¦ Red : Vcc (3~5V) ’é¦ Green : Data Out ’é¦ Black : GND ’é¦ 1Wire ĒåĄņŗĀ ’é¦ ņŻ╝ņ¢┤ņ¦ä ĒåĄņŗĀ ņ▓┤Ļ│äņŚÉ ļ¦łņČöņ¢┤ ņŗĀĒśĖ ņĀäļŗ¼ ’é¦ MCU ņÜöņ▓ŁņŗĀĒśĖĻ░Ć ņĀäļŗ¼ļÉśļ®┤ ļÅÖņ×æ ’é¦ HIGH ļĀłļ▓© ņ¦ĆņåŹ ņŗ£Ļ░äņŚÉ ļö░ļØ╝ 0, 1 ĻĄ¼ļČä ’é¦ 40bit ļŹ░ņØ┤ĒāĆ(ņŖĄļÅä: 16bit, ņś©ļÅä: 16bit, CheckSum: 8bit ’é¦ Real-time ņØ┤ ņĢäļŗłļ®┤ ĒåĄņŗĀ ņŗżĒī© ĒÖĢņ£© ļåÆņØī ’é¦ Rpi.GPIOļĪ£ ĻĄ¼ĒśäĒĢ£ Ļ▓āņØĆ ņ×”ņØĆ ņŗżĒī© ’é¦ http://www.uugear.com/portfolio/dht11-humidity-temperature-sensor-module/
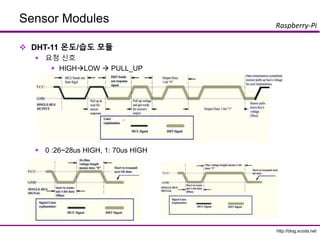
- 84. http://blog.xcoda.net Raspberry-Pi Sensor Modules ’üČ DHT-11 ņś©ļÅä/ņŖĄļÅä ļ¬©ļōł ’é¦ ņÜöņ▓Ł ņŗĀĒśĖ ’é¦ HIGH’āĀLOW ’āĀ PULL_UP ’é¦ 0 :26~28us HIGH, 1: 70us HIGH
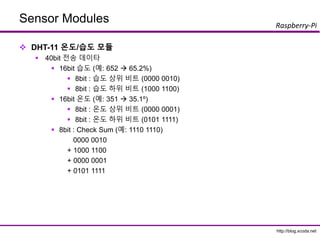
- 85. http://blog.xcoda.net Raspberry-Pi Sensor Modules ’üČ DHT-11 ņś©ļÅä/ņŖĄļÅä ļ¬©ļōł ’é¦ 40bit ņĀäņåĪ ļŹ░ņØ┤ĒāĆ ’é¦ 16bit ņŖĄļÅä (ņśł: 652 ’āĀ 65.2%) ’é¦ 8bit : ņŖĄļÅä ņāüņ£ä ļ╣äĒŖĖ (0000 0010) ’é¦ 8bit : ņŖĄļÅä ĒĢśņ£ä ļ╣äĒŖĖ (1000 1100) ’é¦ 16bit ņś©ļÅä (ņśł: 351 ’āĀ 35.1┬║) ’é¦ 8bit : ņś©ļÅä ņāüņ£ä ļ╣äĒŖĖ (0000 0001) ’é¦ 8bit : ņś©ļÅä ĒĢśņ£ä ļ╣äĒŖĖ (0101 1111) ’é¦ 8bit : Check Sum (ņśł: 1110 1110) 0000 0010 + 1000 1100 + 0000 0001 + 0101 1111
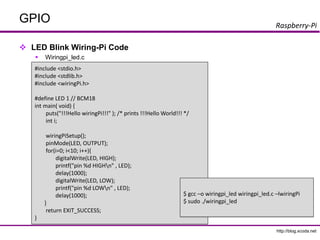
- 86. http://blog.xcoda.net Raspberry-Pi Sensor Modules ’üČ DHT-11 Source ’é¦ Rpi.GPIOļĪ£ ĻĄ¼Ēśä ’é¦ https://github.com/netikras/r-pi_DHT11/blob/master/dht11.py def pullData(): global data global effectiveData global pin data = [] effectiveData = [] GPIO.setup(pin,GPIO.OUT) GPIO.output(pin,GPIO.HIGH) time.sleep(0.025) GPIO.output(pin,GPIO.LOW) time.sleep(0.14) GPIO.setup(pin, GPIO.IN, pull_up_down=GPIO.PUD_UP) for i in range(0,1000): data.append(GPIO.input(pin)) import RPi.GPIO as GPIO import time import sys def bin2dec(string_num): return str(int(string_num, 2)) data = [] effectiveData = [] bits_min=999; bits_max=0; HumidityBit = "" TemperatureBit = "" crc = "" crc_OK = False; Humidity = 0 Temperature = 0 pin=4 GPIO.setmode(GPIO.BCM)
- 87. http://blog.xcoda.net Raspberry-Pi Sensor Modules ’üČ DHT-11 Source ’é¦ Rpi.GPIOļĪ£ ĻĄ¼Ēśä <Ļ│äņåŹ> for i in range(0, 40): buffer = ""; while(seek < len(data) and data[seek] == 0): seek+=1; while(seek < len(data) and data[seek] == 1): seek+=1; buffer += "1"; if (len(buffer) < bits_min): bits_min = len(buffer) if (len(buffer) > bits_max): bits_max = len(buffer) effectiveData.append(buffer); def analyzeData(): seek=0; bits_min=9999; bits_max=0; global HumidityBit global TemperatureBit global crc global Humidity global Temperature HumidityBit = "" TemperatureBit = "" crc = "" while(seek < len(data) and data[seek] == 0): seek+=1; while(seek < len(data) and data[seek] == 1): seek+=1;
- 88. http://blog.xcoda.net Raspberry-Pi Sensor Modules ’üČ DHT-11 Source ’é¦ Rpi.GPIOļĪ£ ĻĄ¼Ēśä <Ļ│äņåŹ> def isDataValid(): global Humidity global Temperature global crc print "isDataValid(): H=%d, T=%d, crc=%d"% (int(Humidity), int(Temperature), int(bin2dec(crc))) if int(Humidity) + int(Temperature) == int(bin2dec(crc)): return True; else: return False; def printData(): global Humidity global Temperature print "H: "+Humidity print "T: "+Temperature for i in range(0, len(effectiveData)): if (len(effectiveData[i]) < ((bits_max + bits_min)/2)): effectiveData[i] = "0"; else: effectiveData[i] = "1"; for i in range(0, 8): HumidityBit += str(effectiveData[i]); for i in range(16, 24): TemperatureBit += str(effectiveData[i]); for i in range(32, 40): crc += str(effectiveData[i]); Humidity = bin2dec(HumidityBit) Temperature = bin2dec(TemperatureBit)
- 89. http://blog.xcoda.net Raspberry-Pi Sensor Modules ’üČ DHT-11 Source ’é¦ Rpi.GPIOļĪ£ ĻĄ¼Ēśä <Ļ│äņåŹ> while (not crc_OK): pullData(); analyzeData(); if (isDataValid()): crc_OK=True; print "r", printData(); else: sys.stderr.write(".") time.sleep(2);
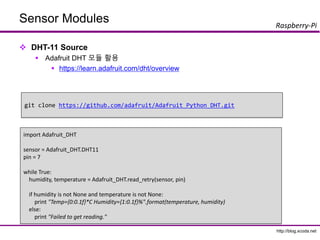
- 90. http://blog.xcoda.net Raspberry-Pi Sensor Modules ’üČ DHT-11 Source ’é¦ Adafruit DHT ļ¬©ļōł ĒÖ£ņÜ® ’é¦ https://learn.adafruit.com/dht/overview import Adafruit_DHT sensor = Adafruit_DHT.DHT11 pin = 7 while True: humidity, temperature = Adafruit_DHT.read_retry(sensor, pin) if humidity is not None and temperature is not None: print "Temp={0:0.1f}*C Humidity={1:0.1f}%".format(temperature, humidity) else: print "Failed to get reading." git clone https://github.com/adafruit/Adafruit_Python_DHT.git
- 91. http://blog.xcoda.net Raspberry-Pi ņäĖļČĆļ¬®ņ░© 1. Introduction 2. Rasbian Installation 3. Development Environment 4. GPIO 5. Digital Output 6. Digital Input 7. Analog Output ŌĆō PWM 8. Sensor Modules 9. ADC-SPI 10. Sound 11. Camera
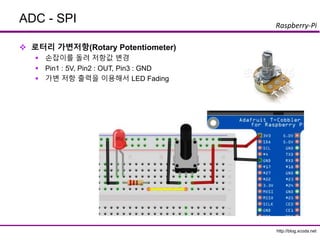
- 92. http://blog.xcoda.net Raspberry-Pi ADC - SPI ’üČ ļĪ£Ēä░ļ”¼ Ļ░Ćļ│ĆņĀĆĒĢŁ(Rotary Potentiometer) ’é¦ ņåÉņ×ĪņØ┤ļź╝ ļÅīļĀż ņĀĆĒĢŁĻ░Æ ļ│ĆĻ▓Į ’é¦ Pin1 : 5V, Pin2 : OUT, Pin3 : GND ’é¦ Ļ░Ćļ│Ć ņĀĆĒĢŁ ņČ£ļĀźņØä ņØ┤ņÜ®ĒĢ┤ņä£ LED Fading
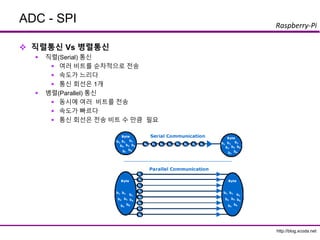
- 93. http://blog.xcoda.net Raspberry-Pi ADC - SPI ’üČ ņ¦üļĀ¼ĒåĄņŗĀ Vs ļ│æļĀ¼ĒåĄņŗĀ ’é¦ ņ¦üļĀ¼(Serial) ĒåĄņŗĀ ’é¦ ņŚ¼ļ¤¼ ļ╣äĒŖĖļź╝ ņł£ņ░©ņĀüņ£╝ļĪ£ ņĀäņåĪ ’é¦ ņåŹļÅäĻ░Ć ļŖÉļ”¼ļŗż ’é¦ ĒåĄņŗĀ ĒÜīņäĀņØĆ 1Ļ░£ ’é¦ ļ│æļĀ¼(Parallel) ĒåĄņŗĀ ’é¦ ļÅÖņŗ£ņŚÉ ņŚ¼ļ¤¼ ļ╣äĒŖĖļź╝ ņĀäņåĪ ’é¦ ņåŹļÅäĻ░Ć ļ╣Āļź┤ļŗż ’é¦ ĒåĄņŗĀ ĒÜīņäĀņØĆ ņĀäņåĪ ļ╣äĒŖĖ ņłś ļ¦īĒü╝ ĒĢäņÜö
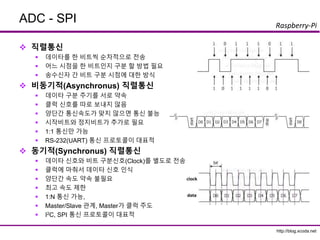
- 94. http://blog.xcoda.net Raspberry-Pi ADC - SPI ’üČ ņ¦üļĀ¼ĒåĄņŗĀ ’é¦ ļŹ░ņØ┤ĒāĆļź╝ ĒĢ£ ļ╣äĒŖĖņö® ņł£ņ░©ņĀüņ£╝ļĪ£ ņĀäņåĪ ’é¦ ņ¢┤ļŖÉ ņŗ£ņĀÉņØä ĒĢ£ ļ╣äĒŖĖņØĖņ¦Ć ĻĄ¼ļČä ĒĢĀ ļ░®ļ▓Ģ ĒĢäņÜö ’é¦ ņåĪņłśņŗĀņ×É Ļ░ä ļ╣äĒŖĖ ĻĄ¼ļČä ņŗ£ņĀÉņŚÉ ļīĆĒĢ£ ļ░®ņŗØ ’üČ ļ╣äļÅÖĻĖ░ņĀü(Asynchronus) ņ¦üļĀ¼ĒåĄņŗĀ ’é¦ ļŹ░ņØ┤ĒāĆ ĻĄ¼ļČä ņŻ╝ĻĖ░ļź╝ ņä£ļĪ£ ņĢĮņåŹ ’é¦ Ēü┤ļ¤Ł ņŗĀĒśĖļź╝ ļö░ļĪ£ ļ│┤ļé┤ņ¦Ć ņĢŖņØī ’é¦ ņ¢æļŗ©Ļ░ä ĒåĄņŗĀņåŹļÅäĻ░Ć ļ¦×ņ¦Ć ņĢŖņ£╝ļ®┤ ĒåĄņŗĀ ļČłļŖź ’é¦ ņŗ£ņ×æļ╣äĒŖĖņÖĆ ņĀĢņ¦Ćļ╣äĒŖĖĻ░Ć ņČöĻ░ĆļĪ£ ĒĢäņÜö ’é¦ 1:1 ĒåĄņŗĀļ¦ī Ļ░ĆļŖź ’é¦ RS-232(UART) ĒåĄņŗĀ ĒöäļĪ£ĒåĀņĮ£ņØ┤ ļīĆĒæ£ņĀü ’üČ ļÅÖĻĖ░ņĀü(Synchronus) ņ¦üļĀ¼ĒåĄņŗĀ ’é¦ ļŹ░ņØ┤ĒāĆ ņŗĀĒśĖņÖĆ ļ╣äĒŖĖ ĻĄ¼ļČäņŗĀĒśĖ(Clock)ļź╝ ļ│äļÅäļĪ£ ņĀäņåĪ ’é¦ Ēü┤ļ¤ŁņŚÉ ļ¦łņČ░ņä£ ļŹ░ņØ┤ĒāĆ ņŗĀĒśĖ ņØĖņŗØ ’é¦ ņ¢æļŗ©Ļ░ä ņåŹļÅä ņĢĮņåŹ ļČłĒĢäņÜö ’é¦ ņĄ£Ļ│Ā ņåŹļÅä ņĀ£ĒĢ£ ’é¦ 1:N ĒåĄņŗĀ Ļ░ĆļŖź, ’é¦ Master/Slave Ļ┤ĆĻ│ä, MasterĻ░Ć Ēü┤ļ¤Ł ņŻ╝ļÅä ’é¦ I2C, SPI ĒåĄņŗĀ ĒöäļĪ£ĒåĀņĮ£ņØ┤ ļīĆĒæ£ņĀü
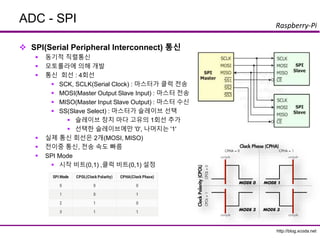
- 95. http://blog.xcoda.net Raspberry-Pi ADC - SPI ’üČ SPI(Serial Peripheral Interconnect) ĒåĄņŗĀ ’é¦ ļÅÖĻĖ░ņĀü ņ¦üļĀ¼ĒåĄņŗĀ ’é¦ ļ¬©ĒåĀļĪżļØ╝ņŚÉ ņØśĒĢ┤ Ļ░£ļ░£ ’é¦ ĒåĄņŗĀ ĒÜīņäĀ : 4ĒÜīņäĀ ’é¦ SCK, SCLK(Serial Clock) : ļ¦łņŖżĒä░Ļ░Ć Ēü┤ļ¤Ł ņĀäņåĪ ’é¦ MOSI(Master Output Slave Input) : ļ¦łņŖżĒä░ ņĀäņåĪ ’é¦ MISO(Master Input Slave Output) : ļ¦łņŖżĒä░ ņłśņŗĀ ’é¦ SS(Slave Select) : ļ¦łņŖżĒä░Ļ░Ć ņŖ¼ļĀłņØ┤ļĖī ņäĀĒāØ ’é¦ ņŖ¼ļĀłņØ┤ļĖī ņןņ╣ś ļ¦łļŗż Ļ│Āņ£ĀņØś 1ĒÜīņäĀ ņČöĻ░Ć ’é¦ ņäĀĒāØĒĢ£ ņŖ¼ļĀłņØ┤ļĖīņŚÉļ¦ī '0', ļéśļ©Ėņ¦ĆļŖö '1' ’é¦ ņŗżņĀ£ ĒåĄņŗĀ ĒÜīņäĀņØĆ 2Ļ░£(MOSI, MISO) ’é¦ ņĀäņØ┤ņżæ ĒåĄņŗĀ, ņĀäņåĪ ņåŹļÅä ļ╣Āļ”ä ’é¦ SPI Mode ’é¦ ņŗ£ņ×æ ļ╣äĒŖĖ(0,1) ,Ēü┤ļ¤Ł ļ╣äĒŖĖ(0,1) ņäżņĀĢ
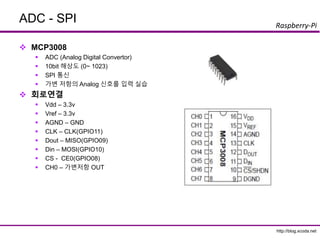
- 96. http://blog.xcoda.net Raspberry-Pi ADC - SPI ’üČ MCP3008 ’é¦ ADC (Analog Digital Convertor) ’é¦ 10bit ĒĢ┤ņāüļÅä (0~ 1023) ’é¦ SPI ĒåĄņŗĀ ’é¦ Ļ░Ćļ│Ć ņĀĆĒĢŁņØś Analog ņŗĀĒśĖļź╝ ņ×ģļĀź ņŗżņŖĄ ’üČ ĒÜīļĪ£ņŚ░Ļ▓░ ’é¦ Vdd ŌĆō 3.3v ’é¦ Vref ŌĆō 3.3v ’é¦ AGND ŌĆō GND ’é¦ CLK ŌĆō CLK(GPIO11) ’é¦ Dout ŌĆō MISO(GPIO09) ’é¦ Din ŌĆō MOSI(GPIO10) ’é¦ CS - CE0(GPIO08) ’é¦ CH0 ŌĆō Ļ░Ćļ│ĆņĀĆĒĢŁ OUT
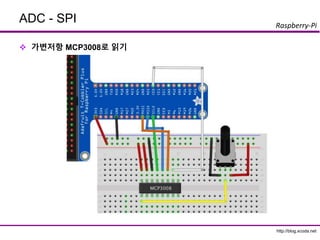
- 97. http://blog.xcoda.net Raspberry-Pi ADC - SPI ’üČ Ļ░Ćļ│ĆņĀĆĒĢŁ MCP3008ļĪ£ ņØĮĻĖ░
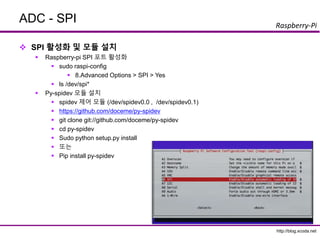
- 98. http://blog.xcoda.net Raspberry-Pi ADC - SPI ’üČ SPI ĒÖ£ņä▒ĒÖö ļ░Å ļ¬©ļōł ņäżņ╣ś ’é¦ Raspberry-pi SPI ĒżĒŖĖ ĒÖ£ņä▒ĒÖö ’é¦ sudo raspi-config ’é¦ 8.Advanced Options > SPI > Yes ’é¦ ls /dev/spi* ’é¦ Py-spidev ļ¬©ļōł ņäżņ╣ś ’é¦ spidev ņĀ£ņ¢┤ ļ¬©ļōł (/dev/spidev0.0 , /dev/spidev0.1) ’é¦ https://github.com/doceme/py-spidev ’é¦ git clone git://github.com/doceme/py-spidev ’é¦ cd py-spidev ’é¦ Sudo python setup.py install ’é¦ ļśÉļŖö ’é¦ Pip install py-spidev
- 99. http://blog.xcoda.net Raspberry-Pi ADC - SPI ’üČ MCP3008 ĒåĄņŗĀ ’é¦ http://www.farnell.com/datasheets/808965.pdf ’é¦ 3Byte(24bit) ņĀäņåĪ/ņłśņŗĀ ’é¦ ņĀäņåĪ ’é¦ 1: Start bit : 1 ’é¦ 2: Channel configuration ’é¦ 3: Ignored ’é¦ ņłśņŗĀ ’é¦ 1: Ignored ’é¦ 2-3 : 10bit value
- 100. http://blog.xcoda.net Raspberry-Pi ADC - SPI ’üČ MCP3008ļĪ£ Ļ░Ćļ│ĆņĀĆĒĢŁ ņØĮĻĖ░ ’é¦ open(port, dev) ’é¦ Port : 0 ’é¦ Dev :CE0 =0, CE1=1 ’é¦ xfer2([byte_1, byte_2, byte_3]) ’é¦ byte_1 : 1 ’é¦ byte_2 : channel config ’é¦ 1000 000 : channel 0 ’é¦ byte_3 : 0(ignored) ’é¦ abc_out ’é¦ r[0] : ignored ’é¦ r[1] : 10bitņØś ņĄ£ņāüņ£ä 2bit Ļ░Æ ’é¦ r[2] : 10bitņØś ĒĢśņ£ä 8bit Ļ░Æ import spidev, time spi = spidev.SpiDev() spi.open(0,0) def analog_read(channel): r = spi.xfer2([1, (8 + channel) << 4, 0]) adc_out = ((r[1]&3) << 8) + r[2] return adc_out try: while True: reading = analog_read(0) voltage = reading * 3.3 / 1024 print("Reading=%dtVoltage=%f" % (reading, voltage)) time.sleep(1) finally: spi.close()
- 101. http://blog.xcoda.net Raspberry-Pi ņäĖļČĆļ¬®ņ░© 1. Introduction 2. Rasbian Installation 3. Development Environment 4. GPIO 5. Digital Output 6. Digital Input 7. Analog Output ŌĆō PWM 8. Sensor Modules 9. ADC-SPI 10. Sound 11. Camera
- 102. http://blog.xcoda.net Raspberry-Pi Sound ’üČ Buzzer ’é¦ Digital output ’é¦ ĒĢäņÜö ļČĆĒÆł ’é¦ ļČĆņĀĆ ņŖżĒö╝ņ╗ż ļśÉļŖö Piezo ’é¦ Ļ░Ćļ│ĆņĀĆĒĢŁ(ļ│╝ļź©ņĪ░ņĀł) ’é¦ WiringPi-Python ļ¬©ļōłļĪ£ļ¦ī Ļ░ĆļŖź ’é¦ https://github.com/WiringPi/WiringPi-Python ’é¦ ņäżņ╣ś ’é¦ git clone --recursive https://github.com/WiringPi/WiringPi-Python.git ’é¦ sudo apt-get install python-dev python-setuptools swig ’é¦ cd WiringPi-Python ’é¦ ./build.sh ’é¦ softToneCreate(PIN) ’é¦ ņČ£ļĀź GPIO Pin ļ▓łĒśĖ ’é¦ softToneWrite(PIN, FREQUENCY) ’é¦ ņČ£ļĀźĒĢśļĀżļŖö ņŻ╝Ēīīņłś Ļ░Æ ņ¦ĆņĀĢ
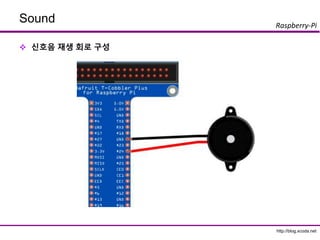
- 103. http://blog.xcoda.net Raspberry-Pi Sound ’üČ ņŗĀĒśĖņØī ņ×¼ņāØ ĒÜīļĪ£ ĻĄ¼ņä▒
- 104. http://blog.xcoda.net Raspberry-Pi Sound ’üČ Ļ▓Įļ│┤ņØī ņČ£ļĀź import wiringpi from time import sleep pin = 24 wiringpi.wiringPiSetupGpio() try: wiringpi.softToneCreate(pin) while True: wiringpi.softToneWrite(pin, 392) sleep(0.1) wiringpi.softToneWrite(pin, 523) sleep(0.1) finally: wiringpi.pinMode(pin, 0)
- 105. http://blog.xcoda.net Raspberry-Pi Sound ’üČ ļ░śņ¦Øļ░śņ¦Ø ņ×æņØĆļ│ä ņŖżņ╝Ćņ╣ś import wiringpi from time import sleep pin = 24 frequencies = {'c':262, 'd':294, 'e':330, 'f':349, 'g':392, 'a':440, 'b':494} notes = 'ccggaag ffeeddc ggffeed ggffeed ccggaag ffeeddc' wiringpi.wiringPiSetupGpio() try: wiringpi.softToneCreate(pin) for i in notes: if i != ' ': wiringpi.softToneWrite(pin, frequencies[i]) sleep(0.3) finally: wiringpi.pinMode(pin, 0)
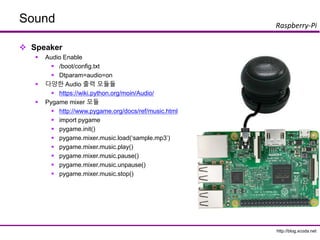
- 106. http://blog.xcoda.net Raspberry-Pi Sound ’üČ Speaker ’é¦ Audio Enable ’é¦ /boot/config.txt ’é¦ Dtparam=audio=on ’é¦ ļŗżņ¢æĒĢ£ Audio ņČ£ļĀź ļ¬©ļōłļōł ’é¦ https://wiki.python.org/moin/Audio/ ’é¦ Pygame mixer ļ¬©ļōł ’é¦ http://www.pygame.org/docs/ref/music.html ’é¦ import pygame ’é¦ pygame.init() ’é¦ pygame.mixer.music.load(ŌĆśsample.mp3ŌĆÖ) ’é¦ pygame.mixer.music.play() ’é¦ pygame.mixer.music.pause() ’é¦ pygame.mixer.music.unpause() ’é¦ pygame.mixer.music.stop()
- 107. http://blog.xcoda.net Raspberry-Pi Sound ’üČ Pygame mixer code import pygame import time pygame.init() #pygame.mixer.music.load("sample.wav") pygame.mixer.music.load("sample.mp3") while True: cmd = raw_input("cmd{play:p, pause:pp, unpause:up, stop:s} :") if cmd == "p": pygame.mixer.music.play() elif cmd == "pp": pygame.mixer.music.pause() elif cmd == "up": pygame.mixer.music.unpause() elif cmd == "s": pygame.mixer.music.stop() # exit(0) else: print "incorrect cmd. try again."
- 108. http://blog.xcoda.net Raspberry-Pi ņäĖļČĆļ¬®ņ░© 1. Introduction 2. Rasbian Installation 3. Development Environment 4. GPIO 5. Digital Output 6. Digital Input 7. Analog Output ŌĆō PWM 8. Sensor Modules 9. ADC-SPI 10. Sound 11. Camera
- 109. http://blog.xcoda.net Raspberry-Pi Camera ’üČ Raspi-Camera ’é¦ https://www.raspberrypi.org/documentation/usage/camera/python/README.md ’é¦ Camera InterfaceņŚÉ ņŚ░Ļ▓░ ’é¦ ļØ╝ņ”łļ▓Āļ”¼ ņ╣┤ļ®öļØ╝ ĒÖ£ņä▒ĒÖö ’é¦ sudo raspi-config ’é¦ 6. Enable Camera ’é¦ Pycamera ļ¬©ļōł ņäżņ╣ś ’é¦ https://github.com/waveform80/picamera ’é¦ sudo apt-get install python-pycamera ’é¦ ņé¼ņ¦ä ļ░Å ļÅÖņśüņāü ņĀĆņן ļööļĀēĒåĀļ”¼ ņāØņä▒ ’é¦ mkdir ~/camera ’é¦ ņ┤¼ņśü ļÅÖņśüņāü play ’é¦ omxplayer path/file.h264
- 110. http://blog.xcoda.net Raspberry-Pi Camera ’üČ Pycamera Code import time import picamera with picamera.PiCamera() as camera: try: camera.start_preview() while True: shutter = input('insert key when you are ready to take photo. [photo:1, video:2] ') now_str = time.strftime("%Y%m%d-%H%M%S") if shutter == 1: camera.capture('/home/pi/demo/camera/photo%s.gif' %now_str) elif shutter == 2: camera.start_recording('/home/pi/demo/camera/video%s.h264' %now_str) raw_input('insert key when you want to stop recoding.') camera.stop_recording() finally: camera.stop_preview()