Robotica autonoma
•
3 likes•241 views

Note sulla robotica autonoma e considerazioni varie


























Robotica autonoma
- 1. Robotica autonoma A cura dell’Ing. Marco Buttolo
- 2. Robotica autonoma  La robotica autonoma è un settore della robotica che si occupa di progettare e realizzare robot in grado di muoversi con una certa autonomia in ambienti sia strutturati che non strutturati e piuttosto complessi.  Un ambiente può essere: - Strutturato - Non strutturato  Un ambiente strutturato è un ambiente di cui si conosce a priori la tipologia e le caratteristiche geometriche degli oggetti presenti nell’ambiente ma anche dell’ambiente stesso. Per esempio: una stanza arredata, ordinata e statica nel senso che non ci sono oggetti in movimento  In un ambiente non strutturato non si ha tale conoscenza a priori.
- 3. Robotica autonoma  Un robot, per muoversi e lavorare in autonomia, deve possedere tutta una seria di caratteristiche, di seguito elencate: - fonte di energia (possibilmente a bordo) - Sistema decisionale a bordo - Sensori ed attuatori a bordo In questo senso, le proprietà appena elencate sono proprio i fattori che distinguono un robot autonomo da un classico robot industriale presente normalmente in una azienda manifatturiera. Tali fattori sono riassumibili in: - Embodiment -> il corpo del robot contiene sensori, attuatori e sistema decisionale - Situatedness -> il robot è presente realmente nell’ambiente e si muove in esso.
- 4. Robotica autonoma  Robot di questo tipo sono i robot mobili i quali possono essere di differente tipo e spesso la classificazione la fa il tipo di attuatore. Per esempio: - Robot cingolati -> sfruttano i cingoli per muoversi - Robot bipedi, quadrupedi,… -> sfruttano delle zampe per muoversi - Robot mobili tipo rover -> sfruttano delle ruote per muoversi La seguente figura mostra un robot ragno da me sviluppato con quattro zampe che gli consentono di muoversi in giro.
- 5. Robotica autonoma  Di seguito viene mostrato un semplice rover da me costruito che si muove invece con quattro semplici ruote.
- 6. Robotica autonoma  I robot come quelli mostrati nella slide precedente sono robot che rientrano nella categoria dei robot WMR (Wheeled Mobile Robot) L’esempio mostrato in precedenza è un robot mobile a 4 ruote adatto per pendii e terreni difficili, ma i robot mobili su ruote possono anche essere robot a due ruote (semplici da realizzare ma sensibili a pendii e tendono a slittare sul terreno) o a tre ruote (sorta di triciclo). Inoltre le ruote possono essere: 1) fisse 2) orientabili
- 7. Robotica autonoma  Anche i robot sottomarini sono robot mobili che sfruttano però altri sistema di movimentazione tra cui: - Classiche eliche - Getti di acqua Solitamente sono robot teleguidati in grado di operare a profondità spesso inaccessibili a noi. Ci sono due grandi famiglie di robot subacquei: 1) ROV -> (Remotely operated vehicle) il quale funziona se collegato via cavo alla base di controllo 2) AUV -> (Autonomous Underwater Vehicle) in grado di muoversi in effettiva autonomia ed è in grado di trasmettere in tempo reale dati e video tramite una connessione di tipo wireless. Esempi di robot di questo tipo sono i robot che saldano le tubature nel mare, i robot che analizzano i fondali marini,… Per esempio: OpenRov (kit open source per la realizzazione di robot acquatici).
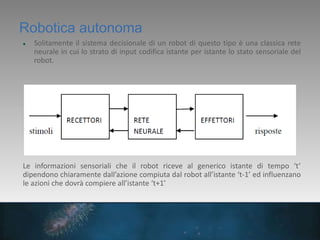
- 8. Robotica autonoma  Solitamente il sistema decisionale di un robot di questo tipo è una classica rete neurale in cui lo strato di input codifica istante per istante lo stato sensoriale del robot. Le informazioni sensoriali che il robot riceve al generico istante di tempo ‘t’ dipendono chiaramente dall’azione compiuta dal robot all’istante ‘t-1’ ed influenzano le azioni che dovrà compiere all’istante ‘t+1’
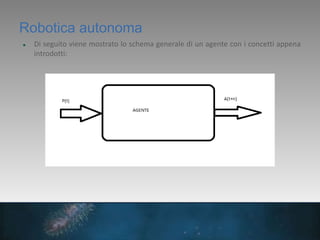
- 9. Robotica autonoma  Di seguito viene mostrato lo schema generale di un agente con i concetti appena introdotti:
- 10. Robotica autonoma  Le abilità necessarie per un robot autonomo sono: 1) abilità comportamentali -> ossia le abilità che gli permettono di muoversi e di sopravvivere nell’ambiente 2) abilità cognitive -> capacità di riconoscere e comprendere l’ambiente in cui è immerso 3) abilità sociali -> capacità di interagire con altri robot (es: sistemi multiagente)
- 11. Robotica autonoma Come già accennato in precedenza i robot si possono dire autonomi se possono muoversi senza l’aiuto dell’uomo in un ambiente piu’ o meno variegato. L’autonomia viene resa possibile dalla presenza di sensori e sistemi di elaborazione dati a bordo, per lo più dedicati a fornire una posizione del robot nel suo ambiente (auto-localizzazione) ed a permetterne la relazione con oggetti dell’ambiente circostante, quali persone, oggetti, e strutture. Tra i sensori utilizzati abbiamo sensori di, telecamere, sensori termici, sensori di campo magnetico, sensori di posizione quali GPS eccetera. Si pensi, per esempio, ad un ambiente produttivo (una azienda manifatturiera). In tali ambienti spesso si usano i robot AGV ( Automatic Guided Vehicle). A differenza di tali robot, che sono pensati per rimanere confinati nelle loro corsie all’interno dello stabilimento, i robot mobili operano negli stessi spazi delle persone e di tutti gli altri veicoli presenti in fabbrica (muletti, transpallet, biciclette, carrelli,…). Per questa ragione la sicurezza è un fattore critico per prevenire eventuali collisioni con gli operatori e gli altri ostacoli fissi o mobili presenti nell’ambiente
- 12. Robotica autonoma Un fattore molto importante da tenere a mente quando si parla di robot mobili autonomi: I robot mobili sono progettati per comunicare fra di loro o con un supervisore durante il loro utilizzo. La flotta di robot deve quindi essere in grado di utilizzare la rete Wi-Fi esistente e offrire un sistema di programmazione robusto e sicuro sia dal punto fisso (Pc) che dal lato mobile (robot). Devono inoltre offrire un elevato standard di sicurezza informatica per evitare di offrire un facile ingresso alla rete. E’ inoltre importante tener conto che, vista l’elevata quantità di traffico dati generata dalla flotta, è possibile sussista la necessità di implementare una rete wireless dedicata esclusivamente alla essa.
- 13. Robotica autonoma Una flotta o sciame di robot viene studiato in un settore della robotica chiamato swarm robotics. In poche parole, in tale settore della robotica si studia il comportamento dei così detti insetti sociali, ossia formiche, api, eccetera. Lo scopo di tale branchia della robotica è quella di progettare e sviluppare robot in grado di riprodurre le stesse funzioni di questi insetti dal punto di vista della cooperazione per il raggiungimento di un particolare scopo. Un interessante sito legato agli swarm robots è il seguente: http://www.swarm-bots.org/
- 14. Robotica autonoma I singoli robot devono possedere determinate caratteristiche che sono riassumibili in: • Omogeneità • Semplicità • Capacità di effettuare comunicazioni locali ed elementari. Una cosa molto importante è che nella robotica collettiva I robots devono: • Essere autonomi • Essere inclusi all’interno dell’ambiente in cui opereranno • Poter agire solo localmente • Collaborare verso un unico obiettivo
- 15. Robotica autonoma Come già detto, un insieme di robot deve necessariamente cooperare per poter affrontare un problema, semplice o complesso che sia, e risolverlo. Tale cooperazione è dettata dal comportamento collettivo (collective behaviour) del sistema, per cui tutti i robot ambiscono allo stesso risultato strutturandosi o compiendo scelte come fossero un unico robot, celando totalmente il comportamento del singolo. Questi comportamenti collettivi possono essere del seguente tipo: • Organizzazione spaziale -> legata all’organizzazione della posizione del robot all’interno dell’ambiente in cui opera. • Navigazione collettiva -> legata all’organizzazione dei movimenti dei singoli robot all’interno dello sciame
- 16. Robotica autonoma • Collective decision making -> legata alla presa di un singola decisione o alla suddivisione del carico di lavoro per il raggiungimento di un determinate obiettivo. Un altro segmento legato alla robotica autonoma è quella della robotica bio-ispirata o biorobotica. Sicuramente, insieme alla robotica umanoide, è uno dei settori più complessi ed affascinanti. Richiede una conoscenza della meccanica, dell’informatica, della biologia, dell’elettronica molto spinta….questo è probabilmente il settore della robotica più trasversale.
- 17. Robotica autonoma Il seguente schema mostra come la biorobotica si inserisce nel contesto della robotica:
- 18. Robotica autonoma La seguente figura mostra un robot scorpione da me realizzato con i mattoncini LEGO:
- 19. Robotica autonoma Si pensi, a titolo di esempio, ad un robot serpente (snake robot). La cinematica diretta ed inversa di un robot serpente può risultare estremamente complessa. Non sono robot semplici da progettare e quindi da realizzare. Un altro tipo di robot complesso è il robot ragno (spider robot), il quale può possedere un grado di complessità strutturale simile a quello del robot serpente. Alcuni famosi esempi di bio robot: 1) robot spider T8 (https://www.robugtix.com/t8x/). 2) Snake robot (http://biorobotics.ri.cmu.edu/projects/modsnake/) 3) RoboBee (https://wyss.harvard.edu/technology/autonomous-flying-microrobots- robobees/) 4) Robot Octopus (https://www.santannapisa.it/it/news/robotica-soft-il-mock-di- octopus-alla-nona-edizione-del-triennale-design-museum)
- 20. Robotica autonoma I roboBee sono robot autonomi particolari capaci di volare come gli insetti e si ispirano la mondo delle API e pertanto anche per similarità con gli swarm robots (robot in grado di cooperare tra di loro). Di seguito viene mostrata una zampa di un robot ragno da me sviluppato:
- 21. Robotica autonoma Il robot fish è un robot pesce in grado di muoversi in ambiente acquatico proprio come fa un qualsiasi pesce. Robot di questo tipo devono chiaramente fare in modo che la parte elettronica sia totalmente protetta dall’acqua.
- 22. Robotica autonoma Particolare importanza sta assumendo il nuovo paradigma della biorobotica: la soft robotica. La soft robotica utilizza nuovi materiali per rendere i movimenti del robot più fluidi e simili a quelli sia umani che animali. Una nuova generazione di automi destinata a svilupparsi grazie all’utilizzo di materiali non rigidi ma morbidi. In questo tipo di robotica non si usano i tradizionali attuatori che qui di seguito vengono elencati: 1) Attuatori elettrici 2) Attuatori penumatici 3) Attuatori oleodinamici
- 23. Robotica autonoma Vengono usati nuovi tipi di attuatori come quelli basati sui polimeri elettroattivi. Tali materiali hanno alcune peculiarità tra cui la capacità di contrarsi ed espandersi (in lunghezza o in volume) se soggetti a stimolazioni elettriche. I polimeri elettroattivi reagiscono anche a pochi volt e sono buoni conduttori perché contengono ioni come il sodio (peccano però in robustezza).
- 24. Robotica autonoma Va ricordato che i muscoli artificiali di ultima generazione si possono classificare in tre tipi distinti: • Muscoli artificiali pneumatici (PAM=Pneumatic Artificial Muscle) • Polimeri elettroattivi (EAP=Electroactive Polymers) • Muscoli artificiali in nanotubo in carbonio (CNM=Carbon Nanotube Muscle)
- 25. Robotica autonoma La robotica autonoma acquista uno speciale significato nel mondo delle esplorazioni spaziali. Si pensi per esempio al robot mobile rover Curiosity partito per Marte per effettuare esplorazioni ed inviare alla NASA foto e video. In questo particolare ambito, è sempre stata presente la necessità di sviluppare robot mobili altamente autonomi per svariati motivi tra cui: • Estrema inospitalità dell’ambiente di esecuzione • Difficoltà di stabilire un controllo continuativo da Terra a causa sia delle enormi distanze coinvolte. • Limitate opportunità di comunicazione determinate dalle leggi della meccanica celeste.
- 26. Robotica autonoma Svariate sono le piattaforme di sviluppo nel campo della robotica, ma ultimamente una delle più apprezzate, senza ombra di dubbio, è il sistema ROS (Robotic Operating System). Il ROS non è un vero e proprio sistema operativo piuttosto un insieme di librerie sviluppate per permette all’ingegnere robotico, figura particolare dell’ingegneria che progetta sistemi robotici, di sviluppare applicazioni per la robotica. http://wiki.ros.org/it Linguaggi di programmazione messi a disposizione da ROS: • C++ • python
- 27. Robotica autonoma Le principali librerie per processi ROS client sono orientate verso i sistemi operativi Unix, soprattutto a causa della loro dipendenza da altri software open source. Anche in Matlab è possibile lavorare con il ROS (https://www.mathworks.com/help/robotics/examples/get-started-with-ros.html). In queste slides abbiamo parlato sia di robot autonomi sia di robot che cooperano. Per questo motivo si consiglia di imparare a lavorare con il ROS, in quanto spesso molti robot quotidiani contano su software basati sulla cooperazione di molti processi spesso nemmeno risiedenti sulla stessa macchina. Uno stesso task può essere raggiunto con la coordinazione di più robot che devono agire all’unisono per risolvere il problema.
- 28. Robotica autonoma E qui entra in gioco il middleware garantito da ROS che permette per l’appunto di instaurare questa cooperazione tramite due meccanismi primari e topic per una comunicazione asincrona, servizi per la tipologia sincrona.
- 29. Per maggiori chiarimenti potete contattami via mail: mbuttolo@libero.it oppure sul sito: www.marcobuttolo.com