Robotics
Download as ppt, pdf1 like498 views
The document discusses the definition, types, and applications of robots, emphasizing their roles in tasks that are dangerous, repetitive, or require high precision. It contrasts robots with automation machinery and details various types of robotic systems, including pick-and-place robots and those employing sensory feedback for accuracy. Key performance measures such as working volume, speed, accuracy, and degrees of freedom are also highlighted.
1 of 14
Downloaded 14 times



Ad
Recommended
Robotics
RoboticsDeepam Goyal
Ěý
This document summarizes robot motion analysis and kinematics. It discusses the historical perspective of robots, definitions of robots, basic robot components, robot configurations, types of joints and kinematics. It also covers topics such as transformations, rotation matrices, homogeneous transformations, and inverse kinematics of one and two link manipulators. The document provides examples and references on these topics.Robotics and machine vision system
Robotics and machine vision systemGowsick Subramaniam
Ěý
This document provides information about robotics and machine vision systems courses. The objectives are to study robot components, derive kinematics and dynamics equations, manipulate trajectories, and learn machine vision. Key topics covered include robot history, components, configurations like Cartesian and cylindrical, applications in material handling, processing, assembly, and inspection. Benefits of robots are also discussed.Robotics: Introduction to Kinematics
Robotics: Introduction to KinematicsDamian T. Gordon
Ěý
The document discusses robot kinematics and control. It covers topics like coordinate frames, homogeneous transformations, forward and inverse kinematics, joint space trajectories, and cubic polynomial path planning. Specifically:
1) Kinematics is the study of robot motion without regard to forces or moments. It describes the spatial configuration using coordinate frames and homogeneous transformations.
2) Forward kinematics determines end effector position from joint angles. Inverse kinematics determines joint angles for a desired end effector position.
3) Joint space trajectories plan motion by describing joint angle profiles over time using functions like cubic polynomials and splines.
4) Cubic polynomials satisfy constraints like initial/final position and velocity to generate smooth motion profiles for a single revolMachine vision systems ppt
Machine vision systems pptAkash Maurya
Ěý
This document discusses machine vision systems and their components. A basic machine vision system includes a camera, light source, frame grabber, circuitry and programming, and a computer. Key components of machine vision systems are the image, camera, framegrabber, preprocessor, memory, processor, and output interface. The document also describes CCD and vidicon cameras, their advantages and disadvantages, and the functions of framegrabbers in sampling and quantizing images. Object properties that can be analyzed from pixel grey values include color, specular properties, non-uniformities, lighting. Applications of machine vision systems are also mentioned.Robots and its type
Robots and its typevsharma4862
Ěý
The document discusses the concept and evolution of robots, defining a robot as a multifunctional manipulator capable of performing various tasks ranging from dangerous to repetitive. It outlines different types of robots, such as pick and place and continuous path control, and their applications in industries like manufacturing and space exploration. Furthermore, it highlights advancements in robot control and programming, including sensory feedback and haptic technologies.BASICS and INTRODUCTION of ROBOTICS
BASICS and INTRODUCTION of ROBOTICSnishantsharma1705
Ěý
The document discusses the history and basics of robotics. It defines a robot and outlines some of the first robots developed. It describes different types of robots like pick and place, continuous path control, and sensory robots. It discusses robot components like sensors, actuators, and power sources. It also summarizes applications of robots in dangerous, dull, or precise tasks.Robot
RobotKashyap Vaghela
Ěý
This document defines and describes robots. It begins by defining a robot as a programmable, self-controlled automatic device that functions like a living agent. It then discusses ideal robot tasks such as dangerous, boring, repetitive, or high-precision work. The document differentiates between automation and robots, describing types of robots based on mobility. It details characteristics like pick and place movements, continuous path control, and use of sensors. Performance measures, controls, and examples of industrial, military, and personal robots are provided. In conclusion, the document discusses advantages and limitations of robots as well as potential future applications using artificial intelligence.Robotix & Industrial Robots
Robotix & Industrial Robotsparthbabariya151
Ěý
The document discusses the design and functionality of robots, highlighting their programmable capabilities for various tasks such as material handling, assembly, and inspection. It elaborates on the key components of robotic systems, including actuators, sensors, and controllers, and explains different operational modes like point-to-point and continuous path. Additionally, it emphasizes the advantages of using industrial robots in manufacturing, such as precision, efficiency, and improved safety for workers.Dr. S.K Lecture-2.pptx
Dr. S.K Lecture-2.pptxSarojKumar428897
Ěý
This document provides an introduction to robotics and robots. It defines robots as programmable mechatronic devices equipped with artificial intelligence. The document then discusses the historical development of robots from ancient times to modern examples. Robots are classified in multiple ways, including by physical configuration, mobility, and control system. The major applications of robots discussed are in manufacturing industries, space exploration, medicine, and underwater exploration. In each field, examples are given of how robots are used.Cobots presentation for industrial applications
Cobots presentation for industrial applicationsssusere8a145
Ěý
Collaborative robotics (cobots) is a growing field where humans and robots work together, eliminating the need for protective barriers, particularly benefiting small and medium enterprises (SMEs) with reduced costs and deployment times. Historically, industrial robots were isolated from humans, but the evolution of cobots allows for diverse robotic interactions, including synchronous and cooperative work, contributing to the Industry 4.0 paradigm. Cobots have improved interfaces, autonomy, and adaptability, enabling them to operate in complex environments while enhancing human-robot collaboration.WEEK 8 A&R.pptx
WEEK 8 A&R.pptxukcalamityukcalamity
Ěý
An industrial robot is a programmable mechanical manipulator designed to perform tasks in an industrial environment. It consists of mechanical components like arms and end effectors, a control system to coordinate movements, and a computer system to process data and control movement. Robots are commonly used in manufacturing to perform repetitive, hazardous, or difficult tasks that humans would rather avoid. They can improve productivity by working faster, more accurately, and without breaks compared to human workers.Mr302:module 4:mtr,ncerc,JVP
Mr302:module 4:mtr,ncerc,JVPJishnu Jish
Ěý
1) The document introduces robotics, defining a robot as a reprogrammable machine designed to perform tasks.
2) It discusses the types, uses, history, key components, and applications of robots. Robots are used for dangerous, repetitive, or menial tasks.
3) The future of robotics involves greater autonomy, with humanoid robots and robot work crews. Applications include agriculture, automotive, military, medical, space, and more.Intro robotics
Intro roboticsrajmohan1976july
Ěý
1) The document introduces robotics, defining a robot as a reprogrammable machine designed to perform tasks.
2) It discusses the types, uses, history, key components, and applications of robots. Robots are used for dangerous, repetitive, or menial tasks.
3) The future of robotics involves greater autonomy, with humanoid robots and robot work crews. Applications include agriculture, automotive, military, medical, space, and more.robotica and automation . robotics introduction
robotica and automation . robotics introductionDrMNagarajanbiher
Ěý
This document provides an introduction to robotics and automation, including definitions of robots, a brief history of robotics, the anatomy and types of robots, how robots are classified, robot specifications, applications of robots, the role of robots in addressing societal problems, and issues around the future of automation. Key topics covered include definitions of robots from various organizations, the components that make up a robotic system, how robots have evolved over time, common ways robots are categorized, their use in fields like manufacturing, medicine, agriculture and more, as well as both benefits and ethical concerns regarding increased automation.introduction-to-robotics.pdf
introduction-to-robotics.pdfYGBala
Ěý
This document provides an introduction to robotics, including:
- Definitions of a robot as machines that can be reprogrammed to perform tasks.
- The main types of robots including manipulators, wheeled, legged, UAVs, and UUVs.
- The key uses of robots in jobs that are dangerous, repetitive, or menial for humans.
- A brief history of robotics from the first industrial robot in 1954 to developments in the 1980s and 2000s.
- The main components of robots including their base, manipulator, controller, sensors, actuators, and power systems.
- Current and future applications of robots in industries like manufacturing, agriculture, healthcare, andRobotic introduction
Robotic introductionMohammad Sabouri
Ěý
The document provides an overview of mechatronics and robotics, detailing the definitions, history, and applications of robots, as well as their advantages and disadvantages. It discusses important concepts such as mechatronics integration, laws of robotics by Asimov, and various types of robots including mobile, industrial, and autonomous robots. Additionally, it highlights key components, programming languages, and software essential for robotic systems.Mr302 module 4-mtr_ncerc,JVP
Mr302 module 4-mtr_ncerc,JVPJishnu Jish
Ěý
This document provides an introduction to robotics, including definitions, types of robots, their uses and history. It discusses key robot components like bases, mechanisms, sensors and actuators. Applications are covered in several domains like industry, space, military, medicine and households. The future of robotics with artificial intelligence and humanoids is also outlined. Finally, several robotics projects at MPCRL involving manipulators, irrigation, vacuum cleaning and more are briefly described.Chapter 1 Intro to industrial robot automation (2)
Chapter 1 Intro to industrial robot automation (2)Afiq Sajuri
Ěý
This document provides an introduction to industrial robot automation. It defines a robot and outlines the typical components of a robot including the controller, manipulator, actuator, end-effector, and sensors. The document also discusses the advantages and disadvantages of robot automation, lists the six main types of robots, and explains some common applications of robot automation in production systems such as welding, assembly, and material handling.B.Tech 5th Semester Industrial Robotics Notes Module- I
B.Tech 5th Semester Industrial Robotics Notes Module- IKameshMechrocks3
Ěý
The document provides an extensive overview of robotics, covering its history, components, applications, and classifications, emphasizing the role of sensors and actuators. It details various types of sensors, including position sensors, and their working principles, applications, and importance in industrial automation and robotics. The text also outlines different robot configurations, control systems, and the impact of advancements in artificial intelligence on the future of robotics.Robotics or Robot Technology
Robotics or Robot Technology Janak Valaki (PhD)
Ěý
The document provides an introduction to robot technology, including definitions and terminology. It defines a robot as an electro-mechanical device with multiple degrees of freedom that is programmable to perform tasks. Industrial robots are designed to handle materials, parts, tools or devices through variable programmed motions. The study of robotics is interdisciplinary, involving mechanical, electrical, electronic and computer engineering. Robotic systems consist of manipulators, drive systems, controls, end effectors, sensors and software. Different robot configurations include Cartesian, cylindrical, spherical and articulated designs. Selection of robots depends on factors like size, degrees of freedom, velocity, precision and load capacity.Automation and robotics
Automation and roboticsBalaji Krishnan
Ěý
The document outlines the concepts of automation and robotics, defining automation as the use of technology to control operations with minimal human intervention, and categorizes automation into fixed, programmable, and flexible types based on hardware and software complexities. It explains robotics terminology and history, along with the various classifications of robots based on anatomy, movement control, technology levels, and their industrial and non-industrial applications. Moreover, it highlights the evolution of robots from basic programmable machines to sophisticated systems capable of decision-making and learning, detailing their uses in diverse tasks from manufacturing to personal assistance.ROBOTICS-LATEST-PPT.pdf
ROBOTICS-LATEST-PPT.pdfBOLLAPRASAD
Ěý
This document provides an introduction to robotics, including definitions of key terms and descriptions of common robot components and configurations. It discusses the differences between automation and robots, defines what a robot is, and outlines Isaac Asimov's three laws of robotics. It also describes different types of actuators (electric, hydraulic, pneumatic), end effectors (grippers and tools), and robot programming methods. Common robot configurations like Cartesian, cylindrical, and articulated robots are illustrated along with their work envelopes. Factors like accuracy, repeatability, speed and payload are discussed in assessing robot performance.Chapter 1 Intro to industrial robot automation
Chapter 1 Intro to industrial robot automationAfiq Sajuri
Ěý
This document provides an introduction to industrial robots and automation. It defines a robot and lists the key components: controller, manipulator, actuator, end effectors, and sensors. The chapter then discusses the advantages of robots in not getting tired or sick and working in dangerous environments, as well as disadvantages like not being creative. It also outlines six main types of robots: Cartesian, cylindrical, spherical, SCARA, articulated, and parallel robots. Finally, it gives examples of robot automation in production systems like welding, painting, assembly, and material handling.Robotics and Automation basic concepts
Robotics and Automation basic conceptsJAIGANESH SEKAR
Ěý
The document provides an overview of robotics and automation, detailing fundamental concepts such as the definition of robots, types, generations, and key components. It explores historical developments, Asimov's laws of robotics, and various classifications based on applications and configurations. Additionally, it delves into technical aspects like degrees of freedom, types of joints, and the evolution of robots from simple mechanical arms to advanced AI-driven machines.Unit 1 AR .pdf robotics unit 1 kinematics
Unit 1 AR .pdf robotics unit 1 kinematicskunal2819052023
Ěý
The document provides a comprehensive overview of robots, detailing their definitions, history, components, and classifications. It emphasizes robotics as a multidisciplinary field designed to create autonomous devices capable of performing various tasks, particularly in industrial contexts. Key topics include the laws of robotics, types of robots, their applications in manufacturing and assistive roles, and the technological evolution leading up to modern advancements.Robotics
RoboticsGarvit Kumar Arya
Ěý
This document provides an overview of robotics, including definitions, key components of robots, types of robots, and the history and evolution of robotics. It defines robotics as machines programmed to perform tasks autonomously and discusses why robots are used, such as to save time, increase perfection and productivity, and reduce human risks. The document also summarizes Isaac Asimov's Three Laws of Robotics, the major components that make up robots, common types of robots like mobile, stationary, autonomous, and remote-controlled robots, as well as the pros and cons of using robots.Introduction to robotics, Laws,Classification,Types, Drives,Geometry
Introduction to robotics, Laws,Classification,Types, Drives,Geometry Mohammad Ehtasham
Ěý
The document provides an overview of robotics, defining a robot as a programmable multi-functional manipulator, and elaborates on various classifications, types, and laws governing robots. It discusses the geometry of robots, their drives (hydraulic, pneumatic, electric), and highlights their key benefits in industry and society, such as improved efficiency and safety. Additionally, it lists ideal tasks for robots and mentions several robotics associations worldwide.Dr. Martin Luther King Jr.
Dr. Martin Luther King Jr.CliffSugermen
Ěý
Martin Luther King Jr. was born in Atlanta, Georgia in 1929. As a young boy growing up in the segregated South, he witnessed racial inequality and injustice. He attended Morehouse College and Crozer Theological Seminary, where he was influenced by the teachings of Mahatma Gandhi on nonviolent civil disobedience. In 1955, Rosa Parks' arrest for refusing to give up her seat to a white passenger on a bus sparked the Montgomery Bus Boycott, thrusting King into a leadership role in the growing civil rights movement.Java
JavaCliffSugermen
Ěý
The document provides an overview of the internet's evolution, its technologies, and its applications, emphasizing the internet as a global network facilitating communication and information sharing. It mentions the rapid growth of internet technology and its significance in modern society, comparable to historical communication systems like radio and television. Additionally, issues such as platform dependency and the role of PCs in internet applications are discussed.More Related Content
Similar to Robotics (20)
Dr. S.K Lecture-2.pptx
Dr. S.K Lecture-2.pptxSarojKumar428897
Ěý
This document provides an introduction to robotics and robots. It defines robots as programmable mechatronic devices equipped with artificial intelligence. The document then discusses the historical development of robots from ancient times to modern examples. Robots are classified in multiple ways, including by physical configuration, mobility, and control system. The major applications of robots discussed are in manufacturing industries, space exploration, medicine, and underwater exploration. In each field, examples are given of how robots are used.Cobots presentation for industrial applications
Cobots presentation for industrial applicationsssusere8a145
Ěý
Collaborative robotics (cobots) is a growing field where humans and robots work together, eliminating the need for protective barriers, particularly benefiting small and medium enterprises (SMEs) with reduced costs and deployment times. Historically, industrial robots were isolated from humans, but the evolution of cobots allows for diverse robotic interactions, including synchronous and cooperative work, contributing to the Industry 4.0 paradigm. Cobots have improved interfaces, autonomy, and adaptability, enabling them to operate in complex environments while enhancing human-robot collaboration.WEEK 8 A&R.pptx
WEEK 8 A&R.pptxukcalamityukcalamity
Ěý
An industrial robot is a programmable mechanical manipulator designed to perform tasks in an industrial environment. It consists of mechanical components like arms and end effectors, a control system to coordinate movements, and a computer system to process data and control movement. Robots are commonly used in manufacturing to perform repetitive, hazardous, or difficult tasks that humans would rather avoid. They can improve productivity by working faster, more accurately, and without breaks compared to human workers.Mr302:module 4:mtr,ncerc,JVP
Mr302:module 4:mtr,ncerc,JVPJishnu Jish
Ěý
1) The document introduces robotics, defining a robot as a reprogrammable machine designed to perform tasks.
2) It discusses the types, uses, history, key components, and applications of robots. Robots are used for dangerous, repetitive, or menial tasks.
3) The future of robotics involves greater autonomy, with humanoid robots and robot work crews. Applications include agriculture, automotive, military, medical, space, and more.Intro robotics
Intro roboticsrajmohan1976july
Ěý
1) The document introduces robotics, defining a robot as a reprogrammable machine designed to perform tasks.
2) It discusses the types, uses, history, key components, and applications of robots. Robots are used for dangerous, repetitive, or menial tasks.
3) The future of robotics involves greater autonomy, with humanoid robots and robot work crews. Applications include agriculture, automotive, military, medical, space, and more.robotica and automation . robotics introduction
robotica and automation . robotics introductionDrMNagarajanbiher
Ěý
This document provides an introduction to robotics and automation, including definitions of robots, a brief history of robotics, the anatomy and types of robots, how robots are classified, robot specifications, applications of robots, the role of robots in addressing societal problems, and issues around the future of automation. Key topics covered include definitions of robots from various organizations, the components that make up a robotic system, how robots have evolved over time, common ways robots are categorized, their use in fields like manufacturing, medicine, agriculture and more, as well as both benefits and ethical concerns regarding increased automation.introduction-to-robotics.pdf
introduction-to-robotics.pdfYGBala
Ěý
This document provides an introduction to robotics, including:
- Definitions of a robot as machines that can be reprogrammed to perform tasks.
- The main types of robots including manipulators, wheeled, legged, UAVs, and UUVs.
- The key uses of robots in jobs that are dangerous, repetitive, or menial for humans.
- A brief history of robotics from the first industrial robot in 1954 to developments in the 1980s and 2000s.
- The main components of robots including their base, manipulator, controller, sensors, actuators, and power systems.
- Current and future applications of robots in industries like manufacturing, agriculture, healthcare, andRobotic introduction
Robotic introductionMohammad Sabouri
Ěý
The document provides an overview of mechatronics and robotics, detailing the definitions, history, and applications of robots, as well as their advantages and disadvantages. It discusses important concepts such as mechatronics integration, laws of robotics by Asimov, and various types of robots including mobile, industrial, and autonomous robots. Additionally, it highlights key components, programming languages, and software essential for robotic systems.Mr302 module 4-mtr_ncerc,JVP
Mr302 module 4-mtr_ncerc,JVPJishnu Jish
Ěý
This document provides an introduction to robotics, including definitions, types of robots, their uses and history. It discusses key robot components like bases, mechanisms, sensors and actuators. Applications are covered in several domains like industry, space, military, medicine and households. The future of robotics with artificial intelligence and humanoids is also outlined. Finally, several robotics projects at MPCRL involving manipulators, irrigation, vacuum cleaning and more are briefly described.Chapter 1 Intro to industrial robot automation (2)
Chapter 1 Intro to industrial robot automation (2)Afiq Sajuri
Ěý
This document provides an introduction to industrial robot automation. It defines a robot and outlines the typical components of a robot including the controller, manipulator, actuator, end-effector, and sensors. The document also discusses the advantages and disadvantages of robot automation, lists the six main types of robots, and explains some common applications of robot automation in production systems such as welding, assembly, and material handling.B.Tech 5th Semester Industrial Robotics Notes Module- I
B.Tech 5th Semester Industrial Robotics Notes Module- IKameshMechrocks3
Ěý
The document provides an extensive overview of robotics, covering its history, components, applications, and classifications, emphasizing the role of sensors and actuators. It details various types of sensors, including position sensors, and their working principles, applications, and importance in industrial automation and robotics. The text also outlines different robot configurations, control systems, and the impact of advancements in artificial intelligence on the future of robotics.Robotics or Robot Technology
Robotics or Robot Technology Janak Valaki (PhD)
Ěý
The document provides an introduction to robot technology, including definitions and terminology. It defines a robot as an electro-mechanical device with multiple degrees of freedom that is programmable to perform tasks. Industrial robots are designed to handle materials, parts, tools or devices through variable programmed motions. The study of robotics is interdisciplinary, involving mechanical, electrical, electronic and computer engineering. Robotic systems consist of manipulators, drive systems, controls, end effectors, sensors and software. Different robot configurations include Cartesian, cylindrical, spherical and articulated designs. Selection of robots depends on factors like size, degrees of freedom, velocity, precision and load capacity.Automation and robotics
Automation and roboticsBalaji Krishnan
Ěý
The document outlines the concepts of automation and robotics, defining automation as the use of technology to control operations with minimal human intervention, and categorizes automation into fixed, programmable, and flexible types based on hardware and software complexities. It explains robotics terminology and history, along with the various classifications of robots based on anatomy, movement control, technology levels, and their industrial and non-industrial applications. Moreover, it highlights the evolution of robots from basic programmable machines to sophisticated systems capable of decision-making and learning, detailing their uses in diverse tasks from manufacturing to personal assistance.ROBOTICS-LATEST-PPT.pdf
ROBOTICS-LATEST-PPT.pdfBOLLAPRASAD
Ěý
This document provides an introduction to robotics, including definitions of key terms and descriptions of common robot components and configurations. It discusses the differences between automation and robots, defines what a robot is, and outlines Isaac Asimov's three laws of robotics. It also describes different types of actuators (electric, hydraulic, pneumatic), end effectors (grippers and tools), and robot programming methods. Common robot configurations like Cartesian, cylindrical, and articulated robots are illustrated along with their work envelopes. Factors like accuracy, repeatability, speed and payload are discussed in assessing robot performance.Chapter 1 Intro to industrial robot automation
Chapter 1 Intro to industrial robot automationAfiq Sajuri
Ěý
This document provides an introduction to industrial robots and automation. It defines a robot and lists the key components: controller, manipulator, actuator, end effectors, and sensors. The chapter then discusses the advantages of robots in not getting tired or sick and working in dangerous environments, as well as disadvantages like not being creative. It also outlines six main types of robots: Cartesian, cylindrical, spherical, SCARA, articulated, and parallel robots. Finally, it gives examples of robot automation in production systems like welding, painting, assembly, and material handling.Robotics and Automation basic concepts
Robotics and Automation basic conceptsJAIGANESH SEKAR
Ěý
The document provides an overview of robotics and automation, detailing fundamental concepts such as the definition of robots, types, generations, and key components. It explores historical developments, Asimov's laws of robotics, and various classifications based on applications and configurations. Additionally, it delves into technical aspects like degrees of freedom, types of joints, and the evolution of robots from simple mechanical arms to advanced AI-driven machines.Unit 1 AR .pdf robotics unit 1 kinematics
Unit 1 AR .pdf robotics unit 1 kinematicskunal2819052023
Ěý
The document provides a comprehensive overview of robots, detailing their definitions, history, components, and classifications. It emphasizes robotics as a multidisciplinary field designed to create autonomous devices capable of performing various tasks, particularly in industrial contexts. Key topics include the laws of robotics, types of robots, their applications in manufacturing and assistive roles, and the technological evolution leading up to modern advancements.Robotics
RoboticsGarvit Kumar Arya
Ěý
This document provides an overview of robotics, including definitions, key components of robots, types of robots, and the history and evolution of robotics. It defines robotics as machines programmed to perform tasks autonomously and discusses why robots are used, such as to save time, increase perfection and productivity, and reduce human risks. The document also summarizes Isaac Asimov's Three Laws of Robotics, the major components that make up robots, common types of robots like mobile, stationary, autonomous, and remote-controlled robots, as well as the pros and cons of using robots.Introduction to robotics, Laws,Classification,Types, Drives,Geometry
Introduction to robotics, Laws,Classification,Types, Drives,Geometry Mohammad Ehtasham
Ěý
The document provides an overview of robotics, defining a robot as a programmable multi-functional manipulator, and elaborates on various classifications, types, and laws governing robots. It discusses the geometry of robots, their drives (hydraulic, pneumatic, electric), and highlights their key benefits in industry and society, such as improved efficiency and safety. Additionally, it lists ideal tasks for robots and mentions several robotics associations worldwide.More from CliffSugermen (15)
Dr. Martin Luther King Jr.
Dr. Martin Luther King Jr.CliffSugermen
Ěý
Martin Luther King Jr. was born in Atlanta, Georgia in 1929. As a young boy growing up in the segregated South, he witnessed racial inequality and injustice. He attended Morehouse College and Crozer Theological Seminary, where he was influenced by the teachings of Mahatma Gandhi on nonviolent civil disobedience. In 1955, Rosa Parks' arrest for refusing to give up her seat to a white passenger on a bus sparked the Montgomery Bus Boycott, thrusting King into a leadership role in the growing civil rights movement.Java
JavaCliffSugermen
Ěý
The document provides an overview of the internet's evolution, its technologies, and its applications, emphasizing the internet as a global network facilitating communication and information sharing. It mentions the rapid growth of internet technology and its significance in modern society, comparable to historical communication systems like radio and television. Additionally, issues such as platform dependency and the role of PCs in internet applications are discussed.Probability
ProbabilityCliffSugermen
Ěý
The document discusses discrete probability, defining key concepts such as sample space and events, and presents the formula for calculating the probability of an event based on its outcomes. It provides examples, including calculating the probability of selecting a blue ball from an urn and winning a lottery, as well as the use of complementary events to simplify calculations. Lastly, it illustrates complementary events with examples regarding bit sequences and birthday coincidences among a group of people.Probability
ProbabilityCliffSugermen
Ěý
The document discusses discrete probability, explaining concepts such as sample space, events, and how to calculate probabilities of events using a finite sample space. It includes examples illustrating how to determine the probability of outcomes, such as drawing balls from an urn and lottery odds. It also covers complementary events, showing methods to compute probabilities when it is simpler to determine the probability of the complement.Bluetooth mobileip
Bluetooth mobileipCliffSugermen
Ěý
The document discusses Bluetooth technology and mobile IP wireless networks, focusing on the structure of piconets and scatternets where each piconet has one master and up to seven slaves. It explains frequency hopping, class specifications for transmitters, and the types of connections available, including synchronous and asynchronous links. Additionally, it details Bluetooth packet structure, highlighting the access code, header, and payload used in communication.Knowledge management
Knowledge managementCliffSugermen
Ěý
The document discusses knowledge management (KM) concepts and methods relevant to the digital age, emphasizing the importance of KM in education and its role in decision-making and innovation. It defines KM as a discipline aimed at managing and sharing information and knowledge within organizations, referencing various sources and the historical shift towards a knowledge-based economy. Additionally, it outlines the distinction between explicit and tacit knowledge, and highlights the challenges and opportunities presented by the digital landscape.Forests
ForestsCliffSugermen
Ěý
This document provides information for teachers on forests and the forest industry in the United States. It begins by outlining learning objectives for students to define forests and describe the six forest regions in the US. It then gives a brief history of the first forestry industry, which began with Leif Ericson in the 10th century. The document defines forests and explains that they cover about a third of the US land area today. It also outlines that private landowners, the government, and forest product industries are the main owners of the 250 million acres of commercial forests in the US. It concludes by describing the two main types of trees used in forestry - softwoods and hardwoods - and noting that the six forest regions varyAir pollution
Air pollutionCliffSugermen
Ěý
Air pollution involves harmful materials entering the atmosphere, leading to health risks and environmental damage. Major anthropogenic sources include stationary and mobile emissions from fuels, while natural sources encompass dust, methane from animals, and radon gas. Additionally, wildfires and volcanic activity contribute to air pollution through various emissions. Training Skills
Training SkillsCliffSugermen
Ěý
The document outlines the various roles of a trainer, including planning, facilitating, and modeling, as well as essential skills such as effective communication and feedback. It emphasizes the importance of understanding different communication styles and the factors that affect listening and interpretation. Additionally, it highlights the role of a facilitator in guiding group collaboration and learning.Introduction to data communications
Introduction to data communicationsCliffSugermen
Ěý
The document provides an introduction to data communications, distinguishing it from telecommunications and detailing its transmission methods, including various mediums. It covers the history of telecommunications and data communications, highlights key developments, the framework for global electronic commerce, important features of communication, and major data communication applications. Additionally, it discusses business data communication issues and career opportunities in the field. The Greenhouse Effect on Earth
The Greenhouse Effect on EarthCliffSugermen
Ěý
The document summarizes key aspects of the greenhouse effect on Earth. It notes that Earth's atmosphere is slightly warmer than expected due to greenhouse gases like water vapor and carbon dioxide trapping infrared radiation emitted from the planet's surface. These greenhouse gases absorb and re-emit the infrared light, increasing the atmosphere's temperature. This mild greenhouse effect creates just the right conditions for liquid water to exist on the Earth's surface.HEALTHY HABITS FOR LIFE
HEALTHY HABITS FOR LIFECliffSugermen
Ěý
The document discusses healthy eating habits and provides guidelines for maintaining a healthy weight through a balanced diet and moderation. It emphasizes the importance of understanding personal nutritional needs based on factors such as age, gender, and activity level. Additionally, it encourages individuals to create a personalized eating plan using resources like MyPyramid.Google Glass
Google GlassCliffSugermen
Ěý
The document discusses a new wearable technology called Glassup, which integrates a micro-projector and advanced optics to provide real-time information to users. It targets a diverse market, including tech enthusiasts, sportsmen, and people in various professional fields, while offering an SDK for developers to create apps. Key features include a lightweight design, Bluetooth connectivity, and a range of applications for smartphones.Cloud computing
Cloud computingCliffSugermen
Ěý
The document discusses cloud computing, its various models (IaaS, PaaS, SaaS), and associated technologies, emphasizing its impact on high-performance computing and business applications. It highlights the challenges of aligning cloud solutions with user needs, scalability, and cost-effectiveness. The speakers will provide insights from their expertise and present a case study demonstrating cloud capabilities.The Game Badminton
The Game BadmintonCliffSugermen
Ěý
Badminton is a racquet sport played in singles or doubles, where players score points by hitting a shuttlecock over a net into the opponent's court. Originating in mid-19th century British India, it gained popularity in England and was officially launched in 1873. Each game is played to 21 points, and matches consist of the best of three games, with specific serving rules and scoring methods.Ad
Recently uploaded (20)
OpenACC and Open Hackathons Monthly Highlights June 2025
OpenACC and Open Hackathons Monthly Highlights June 2025OpenACC
Ěý
The OpenACC organization focuses on enhancing parallel computing skills and advancing interoperability in scientific applications through hackathons and training. The upcoming 2025 Open Accelerated Computing Summit (OACS) aims to explore the convergence of AI and HPC in scientific computing and foster knowledge sharing. This year's OACS welcomes talk submissions from a variety of topics, from Using Standard Language Parallelism to Computer Vision Applications. The document also highlights several open hackathons, a call to apply for NVIDIA Academic Grant Program and resources for optimizing scientific applications using OpenACC directives.9-1-1 Addressing: End-to-End Automation Using FME
9-1-1 Addressing: End-to-End Automation Using FMESafe Software
Ěý
This session will cover a common use case for local and state/provincial governments who create and/or maintain their 9-1-1 addressing data, particularly address points and road centerlines. In this session, you'll learn how FME has helped Shelby County 9-1-1 (TN) automate the 9-1-1 addressing process; including automatically assigning attributes from disparate sources, on-the-fly QAQC of said data, and reporting. The FME logic that this presentation will cover includes: Table joins using attributes and geometry, Looping in custom transformers, Working with lists and Change detection."Database isolation: how we deal with hundreds of direct connections to the d...
"Database isolation: how we deal with hundreds of direct connections to the d...Fwdays
Ěý
What can go wrong if you allow each service to access the database directly? In a startup, this seems like a quick and easy solution, but as the system scales, problems appear that no one could have guessed.
In my talk, I'll share Solidgate's experience in transforming its architecture: from the chaos of direct connections to a service-based data access model. I will talk about the transition stages, bottlenecks, and how isolation affected infrastructure support. I will honestly show what worked and what didn't. In short, we will analyze the controversy of this talk.Information Security Response Team Nepal_npCERT_Vice_President_Sudan_Jha.pdf
Information Security Response Team Nepal_npCERT_Vice_President_Sudan_Jha.pdfICT Frame Magazine Pvt. Ltd.
Ěý
Artificial Intelligence (AI) is rapidly changing the face of cybersecurity across the globe. In Nepal, the shift is already underway. Vice President of the Information Security Response Team Nepal (npCERT) and Information Security Consultant at One Cover Pvt. Ltd., Sudan Jha, recently presented an in-depth workshop on how AI can strengthen national security and digital defenses.Wenn alles versagt - IBM Tape schützt, was zählt! Und besonders mit dem neust...
Wenn alles versagt - IBM Tape schützt, was zählt! Und besonders mit dem neust...Josef Weingand
Ěý
IBM LTO10FME for Distribution & Transmission Integrity Management Program (DIMP & TIMP)
FME for Distribution & Transmission Integrity Management Program (DIMP & TIMP)Safe Software
Ěý
Peoples Gas in Chicago, IL has changed to a new Distribution & Transmission Integrity Management Program (DIMP & TIMP) software provider in recent years. In order to successfully deploy the new software we have created a series of ETL processes using FME Form to transform our gas facility data to meet the required DIMP & TIMP data specifications. This presentation will provide an overview of how we used FME to transform data from ESRI’s Utility Network and several other internal and external sources to meet the strict data specifications for the DIMP and TIMP software solutions.“From Enterprise to Makers: Driving Vision AI Innovation at the Extreme Edge,...
“From Enterprise to Makers: Driving Vision AI Innovation at the Extreme Edge,...Edge AI and Vision Alliance
Ěý
For the full video of this presentation, please visit: https://www.edge-ai-vision.com/2025/06/from-enterprise-to-makers-driving-vision-ai-innovation-at-the-extreme-edge-a-presentation-from-sony-semiconductor-solutions/
Amir Servi, Edge Deep Learning Product Manager at Sony Semiconductor Solutions, presents the “From Enterprise to Makers: Driving Vision AI Innovation at the Extreme Edge” tutorial at the May 2025 Embedded Vision Summit.
Sony’s unique integrated sensor-processor technology is enabling ultra-efficient intelligence directly at the image source, transforming vision AI for enterprises and developers alike. In this presentation, Servi showcases how the AITRIOS platform simplifies vision AI for enterprises with tools for large-scale deployments and model management.
Servi also highlights his company’s collaboration with Ultralytics and Raspberry Pi, which brings YOLO models to the developer community, empowering grassroots innovation. Whether you’re scaling vision AI for industry or experimenting with cutting-edge tools, this presentation will demonstrate how Sony is accelerating high-performance, energy-efficient vision AI for all.Tech-ASan: Two-stage check for Address Sanitizer - Yixuan Cao.pdf
Tech-ASan: Two-stage check for Address Sanitizer - Yixuan Cao.pdfcaoyixuan2019
Ěý
A presentation at Internetware 2025.FIDO Seminar: Authentication for a Billion Consumers - Amazon.pptx
FIDO Seminar: Authentication for a Billion Consumers - Amazon.pptxFIDO Alliance
Ěý
FIDO Seminar: Authentication for a Billion Consumers - AmazonENERGY CONSUMPTION CALCULATION IN ENERGY-EFFICIENT AIR CONDITIONER.pdf
ENERGY CONSUMPTION CALCULATION IN ENERGY-EFFICIENT AIR CONDITIONER.pdfMuhammad Rizwan Akram
Ěý
DC Inverter Air Conditioners are revolutionizing the cooling industry by delivering affordable,
energy-efficient, and environmentally sustainable climate control solutions. Unlike conventional
fixed-speed air conditioners, DC inverter systems operate with variable-speed compressors that
modulate cooling output based on demand, significantly reducing energy consumption and
extending the lifespan of the appliance.
These systems are critical in reducing electricity usage, lowering greenhouse gas emissions, and
promoting eco-friendly technologies in residential and commercial sectors. With advancements in
compressor control, refrigerant efficiency, and smart energy management, DC inverter air conditioners
have become a benchmark in sustainable climate control solutions“Key Requirements to Successfully Implement Generative AI in Edge Devices—Opt...
“Key Requirements to Successfully Implement Generative AI in Edge Devices—Opt...Edge AI and Vision Alliance
Ěý
For the full video of this presentation, please visit: https://www.edge-ai-vision.com/2025/06/key-requirements-to-successfully-implement-generative-ai-in-edge-devices-optimized-mapping-to-the-enhanced-npx6-neural-processing-unit-ip-a-presentation-from-synopsys/
Gordon Cooper, Principal Product Manager at Synopsys, presents the “Key Requirements to Successfully Implement Generative AI in Edge Devices—Optimized Mapping to the Enhanced NPX6 Neural Processing Unit IP” tutorial at the May 2025 Embedded Vision Summit.
In this talk, Cooper discusses emerging trends in generative AI for edge devices and the key role of transformer-based neural networks. He reviews the distinct attributes of transformers, their advantages over conventional convolutional neural networks and how they enable generative AI.
Cooper then covers key requirements that must be met for neural processing units (NPU) to support transformers and generative AI in edge device applications. He uses transformer-based generative AI examples to illustrate the efficient mapping of these workloads onto the enhanced Synopsys ARC NPX NPU IP family.Securing Account Lifecycles in the Age of Deepfakes.pptx
Securing Account Lifecycles in the Age of Deepfakes.pptxFIDO Alliance
Ěý
Securing Account Lifecycles in the Age of DeepfakesThe Future of Technology: 2025-2125 by Saikat Basu.pdf
The Future of Technology: 2025-2125 by Saikat Basu.pdfSaikat Basu
Ěý
A peek into the next 100 years of technology. From Generative AI to Global AI networks to Martian Colonisation to Interstellar exploration to Industrial Nanotechnology to Artificial Consciousness, this is a journey you don't want to miss. Which ones excite you the most? Which ones are you apprehensive about? Feel free to comment! Let the conversation begin!No-Code Workflows for CAD & 3D Data: Scaling AI-Driven Infrastructure
No-Code Workflows for CAD & 3D Data: Scaling AI-Driven InfrastructureSafe Software
Ěý
When projects depend on fast, reliable spatial data, every minute counts.
AI Clearing needed a faster way to handle complex spatial data from drone surveys, CAD designs and 3D project models across construction sites. With FME Form, they built no-code workflows to clean, convert, integrate, and validate dozens of data formats – cutting analysis time from 5 hours to just 30 minutes.
Join us, our partner Globema, and customer AI Clearing to see how they:
-Automate processing of 2D, 3D, drone, spatial, and non-spatial data
-Analyze construction progress 10x faster and with fewer errors
-Handle diverse formats like DWG, KML, SHP, and PDF with ease
-Scale their workflows for international projects in solar, roads, and pipelines
If you work with complex data, join us to learn how to optimize your own processes and transform your results with FME.FIDO Seminar: New Data: Passkey Adoption in the Workforce.pptx
FIDO Seminar: New Data: Passkey Adoption in the Workforce.pptxFIDO Alliance
Ěý
FIDO Seminar: New Data: Passkey Adoption in the WorkforceEnabling BIM / GIS integrations with Other Systems with FME
Enabling BIM / GIS integrations with Other Systems with FMESafe Software
Ěý
Jacobs has successfully utilized FME to tackle the complexities of integrating diverse data sources in a confidential $1 billion campus improvement project. The project aimed to create a comprehensive digital twin by merging Building Information Modeling (BIM) data, Construction Operations Building Information Exchange (COBie) data, and various other data sources into a unified Geographic Information System (GIS) platform. The challenge lay in the disparate nature of these data sources, which were siloed and incompatible with each other, hindering efficient data management and decision-making processes.
To address this, Jacobs leveraged FME to automate the extraction, transformation, and loading (ETL) of data between ArcGIS Indoors and IBM Maximo. This process ensured accurate transfer of maintainable asset and work order data, creating a comprehensive 2D and 3D representation of the campus for Facility Management. FME's server capabilities enabled real-time updates and synchronization between ArcGIS Indoors and Maximo, facilitating automatic updates of asset information and work orders. Additionally, Survey123 forms allowed field personnel to capture and submit data directly from their mobile devices, triggering FME workflows via webhooks for real-time data updates. This seamless integration has significantly enhanced data management, improved decision-making processes, and ensured data consistency across the project lifecycle.OpenPOWER Foundation & Open-Source Core Innovations
OpenPOWER Foundation & Open-Source Core InnovationsIBM
Ěý
penPOWER offers a fully open, royalty-free CPU architecture for custom chip design.
It enables both lightweight FPGA cores (like Microwatt) and high-performance processors (like POWER10).
Developers have full access to source code, specs, and tools for end-to-end chip creation.
It supports AI, HPC, cloud, and embedded workloads with proven performance.
Backed by a global community, it fosters innovation, education, and collaboration.You are not excused! How to avoid security blind spots on the way to production
You are not excused! How to avoid security blind spots on the way to productionMichele Leroux Bustamante
Ěý
We live in an ever evolving landscape for cyber threats creating security risk for your production systems. Mitigating these risks requires participation throughout all stages from development through production delivery - and by every role including architects, developers QA and DevOps engineers, product owners and leadership. No one is excused! This session will cover examples of common mistakes or missed opportunities that can lead to vulnerabilities in production - and ways to do better throughout the development lifecycle.Can We Use Rust to Develop Extensions for PostgreSQL? (POSETTE: An Event for ...
Can We Use Rust to Develop Extensions for PostgreSQL? (POSETTE: An Event for ...NTT DATA Technology & Innovation
Ěý
Can We Use Rust to Develop Extensions for PostgreSQL?
(POSETTE: An Event for Postgres 2025)
June 11, 2025
Shinya Kato
NTT DATA Japan CorporationInformation Security Response Team Nepal_npCERT_Vice_President_Sudan_Jha.pdf
Information Security Response Team Nepal_npCERT_Vice_President_Sudan_Jha.pdfICT Frame Magazine Pvt. Ltd.
Ěý
“From Enterprise to Makers: Driving Vision AI Innovation at the Extreme Edge,...
“From Enterprise to Makers: Driving Vision AI Innovation at the Extreme Edge,...Edge AI and Vision Alliance
Ěý
“Key Requirements to Successfully Implement Generative AI in Edge Devices—Opt...
“Key Requirements to Successfully Implement Generative AI in Edge Devices—Opt...Edge AI and Vision Alliance
Ěý
You are not excused! How to avoid security blind spots on the way to production
You are not excused! How to avoid security blind spots on the way to productionMichele Leroux Bustamante
Ěý
Can We Use Rust to Develop Extensions for PostgreSQL? (POSETTE: An Event for ...
Can We Use Rust to Develop Extensions for PostgreSQL? (POSETTE: An Event for ...NTT DATA Technology & Innovation
Ěý
Ad
Robotics
- 1. Robotics
- 2. “Robot” coined by Karel Capek in a 1921 science-fiction Czech play
- 3. Definition: “A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices through variable programmed motions for the performance of a variety of tasks.” (Robot Institute of America) Alternate definition: “A robot is a one-armed, blind idiot with limited memory and which cannot speak, see, or hear.” MIT’s Kismet: a robot which exhibits expressions, e.g., happy, sad, surprise, disgust.
- 4. Ideal Tasks Tasks which are: – Dangerous • Space exploration • chemical spill cleanup • disarming bombs • disaster cleanup – Boring and/or repetitive • Welding car frames • part pick and place • manufacturing parts. – High precision or high speed • Electronics testing • Surgery • precision machining.
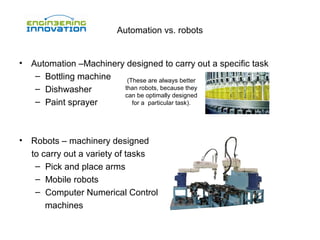
- 5. Automation vs. robots • Automation –Machinery designed to carry out a specific task – Bottling machine (These are always better than robots, because they – Dishwasher can be optimally designed – Paint sprayer for a particular task). • Robots – machinery designed to carry out a variety of tasks – Pick and place arms – Mobile robots – Computer Numerical Control machines
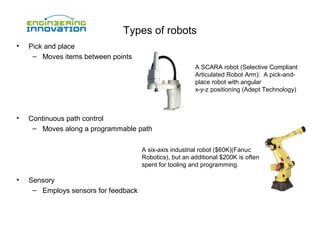
- 6. Types of robots • Pick and place – Moves items between points A SCARA robot (Selective Compliant Articulated Robot Arm): A pick-andplace robot with angular x-y-z positioning (Adept Technology) • Continuous path control – Moves along a programmable path A six-axis industrial robot ($60K)(Fanuc Robotics), but an additional $200K is often spent for tooling and programming. • Sensory – Employs sensors for feedback
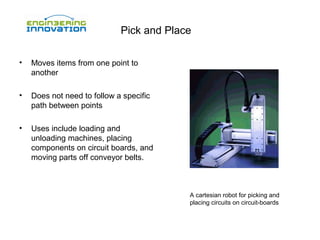
- 7. Pick and Place • Moves items from one point to another • Does not need to follow a specific path between points • Uses include loading and unloading machines, placing components on circuit boards, and moving parts off conveyor belts. A cartesian robot for picking and placing circuits on circuit-boards
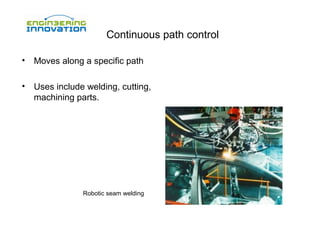
- 8. Continuous path control • Moves along a specific path • Uses include welding, cutting, machining parts. Robotic seam welding
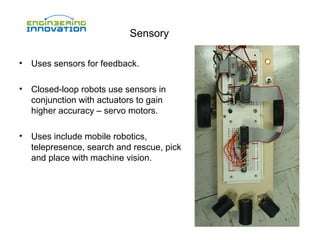
- 9. Sensory • Uses sensors for feedback. • Closed-loop robots use sensors in conjunction with actuators to gain higher accuracy – servo motors. • Uses include mobile robotics, telepresence, search and rescue, pick and place with machine vision.
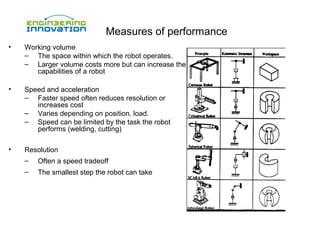
- 10. Measures of performance • Working volume – The space within which the robot operates. – Larger volume costs more but can increase the capabilities of a robot • Speed and acceleration – Faster speed often reduces resolution or increases cost – Varies depending on position, load. – Speed can be limited by the task the robot performs (welding, cutting) • Resolution – Often a speed tradeoff – The smallest step the robot can take
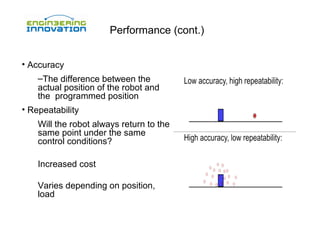
- 11. Performance (cont.) • Accuracy –The difference between the actual position of the robot and the programmed position • Repeatability Will the robot always return to the same point under the same control conditions? Increased cost Varies depending on position, load
- 12. Control •Open loop, i.e., no feedback, deterministic •Closed loop, i.e., feedback, maybe a sense of touch and/or vision
- 13. Kinematics and dynamics • Degrees of freedom—number of independent motions – – – – Translation--3 independent directions Rotation-- 3 independent axes 2D motion = 3 degrees of freedom: 2 translation, 1 rotation 3D motion = 6 degrees of freedom: 3 translation, 3 rotation
- 14. Kinematics and dynamics (cont.) • • Actions – Simple joints • prismatic—sliding joint, e.g., square cylinder in square tube • revolute—hinge joint – Compound joints • ball and socket = 3 revolute joints • round cylinder in tube = 1 prismatic, 1 revolute Mobility – Wheels – multipedal (multi-legged with a sequence of actions)