Ros Kd
Download as pptx, pdf2 likes702 views

The document discusses the Robot Operating System (ROS). It provides an introduction and overview of ROS including its design goals and nomenclature. It then describes several key use cases of ROS like debugging individual nodes, logging and playback capabilities, developing packaged subsystems, enabling collaborative development, providing visualization and monitoring tools, supporting composition of functionality through packages and stacks, and handling transformations between reference frames.


Ros Kd
- 1. Morgan Quigley Presented By:- Computer Science Department, Stanford University. Ubaidullah Alias Kashif Willow Garage, Menlo Park, CA MSCS-III Computer Science Department, Sukkur IBA University of Southern California 1
- 2. Robot Operating System ’éŚ INTRODUCTION ’éŚ DESIGN GOALS ’éŚ NOMENCLATURE ’éŚ USE CASES
- 3. USE CASES ’éŚ Debugging a single node ’éŚ Logging and playback ’éŚ Packaged subsystems ’éŚ Collaborative Development ’éŚ Visualization and Monitoring ’éŚ Composition of functionality ’éŚ Transformations ’éŚ Conclusion
- 4. Debugging a single node ’éŚ A node is the well defined limited area of the system where planning, reasoning, perception or control is performed. ’éŚ To get a robotic system up and running for experiments, larger software ecosystem must exist. ’éŚ This adds a significant amount of difficulty to integrative robotics research. ’éŚ ROS modular structure minimize the difficulty of debugging in settings ’éŚ Nods connect to each other at run time ’éŚ The ease of inserting and removing nodes from a running ROS based system is one of its most powerful and fundamental features.
- 5. Logging and playback ’éŚ ROS supports generic logging and playback functionality. Can be performed via command line and requires no modification in source code. ’éŚ following network graph could be quickly set up to collect a dataset for visual-odometry research: ’éŚ To facilitate logging and monitoring , the rosconsole library builds upon the Apache projectŌĆÖs log4cxx system to provide a convenient and elegant logging interface.
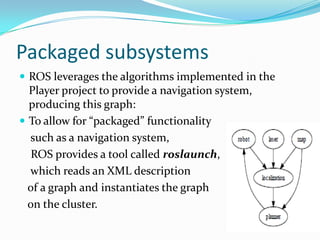
- 6. Packaged subsystems ’éŚ ROS leverages the algorithms implemented in the Player project to provide a navigation system, producing this graph: ’éŚ To allow for ŌĆ£packagedŌĆØ functionality such as a navigation system, ROS provides a tool called roslaunch, which reads an XML description of a graph and instantiates the graph on the cluster.
- 7. Collaborative Development ’éŚ To support collaborative development, ’éŚ the ROS software system is organized into packages. ’éŚ A ROS package is simply a directory which contains an XML file describing the package and stating any dependencies. ’éŚ For example, one ROS repository has root directories including ŌĆ£nav,ŌĆØ ŌĆ£vision,ŌĆØ and ŌĆ£motion planning,ŌĆØ each of which contains many packages as subdirectories. ’éŚ ROS provides a utility called rospack to query and inspect the code tree, search dependencies, find packages by name, etc
- 8. Visualization and Monitoring ’éŚ While designing and debugging robotics software, it often becomes necessary to observe some state while the system is running. ’éŚ Printf technique can be difficult to extend to large-scale distributed systems, and can become unwieldy for general- purpose monitoring. ’éŚ Instead, ROS can exploit the dynamic nature of the connectivity graph to ŌĆ£tap intoŌĆØ any message stream on the system. ’éŚ rviz program, which is distributed with ROS. Visualization panels can be dynamically instantiated to view a large variety of data types, point clouds, geometric primitives (such as object ’éŚ recognition results), render robot poses and trajectories, etc.
- 9. Composition of functionality ’éŚ In ROS, a ŌĆ£stackŌĆØ of software is a cluster of nodes that does something useful. ’éŚ The previous graph was automatically generated by the rxgraph tool, which can inspect and monitor any ROS graph at runtime. Its output renders nodes as ovals, topics as squares, and connectivity as arcs.
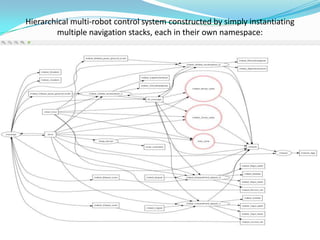
- 10. Hierarchical multi-robot control system constructed by simply instantiating multiple navigation stacks, each in their own namespace:
- 11. Transformations ’éŚ Robotic systems often need to track spatial relationships for a variety of reasons: between a mobile robot and some fixed frame of reference for localization. ’éŚ The tf system constructs a dynamic transformation tree which relates all frames of reference in the system. ’éŚ For example, the tf system can be used to easily generate point clouds in a stationary ŌĆ£mapŌĆØ frame from laser scans received by a tilting laser scanner on a moving robot
- 12. ’éŚ ROS robot software distributions ’éŚ ROS Fuerte (April, 2012) ’éŚ ROS Electric (August, 2011) ’éŚ ROS Diamondback (March, 2011) ’éŚ ROS C Turtle (August, 2010) ’éŚ ROS Box Turtle (March, 2010)
- 13. ’éŚ Robots Using ROS (Ongoing Series) ’éŚ From small differential-drive robots to mobile manipulators to autonomous cars, robots of every size and shape are using ROS to do interesting research and applications development. Groups around the world are also releasing free, open-source software to get you started on your own robot. ’éŚ Part 6: Helicopters Using ROS ’éŚ Part 5: Meka, Qbo, Mini-PR2, Lego NXT ’éŚ Part 4: Shadow Dextrous Hand, Robotino, Penn Quadrotors, Washington University's B21r and Videre ERRATICs ’éŚ Part 3: TUM-Rosie, Marvin, HERB, CKBots ’éŚ Part 2: Care-O-bot 3, BOSCH RTC, EL-E and Cody, Kawada HRP2-V ’éŚ Part 1: STAIR 1, Aldebaran Nao, Junior ’éŚ App Sprints
- 14. THANKS ’éŚ http://www.ros.org ’éŚ http://www.willowgarage.com/pages/software/ros-platform ’éŚ http://www.ros.org/wiki/rviz ’éŚ https://www.developers.google.com/chart/image/docs/gallery/graphviz ’éŚ http://answers.ros.org/question/35884/rviz-camera-display-camera_info- problem/