





















![Example 3.4:
’ā╣
’ā║
’ā║
’ā¬ ’ā║
’ā¬
’ā®
’ā¬’ā½(2s’Ć½1)(s ’Ć½ 2)’ā║
’ā╗
4s ’ĆŁ10
2s ’Ć½1
1
’ā¬
(s) ’ĆĮ
c1
Ĝ
The 1st column is
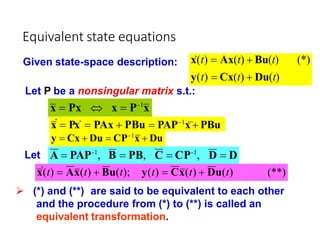
Consider again the proper rational matrix in Ex. 3.3.
’ā║
’ā║
’ā╣
’ā¬
’ā¬
’ā® 3
(s ’Ć½ 2)2
’ā║
’ā╗
s ’Ć½1
’ā¬’ā½(2s ’Ć½1)(s ’Ć½ 2)
s ’Ć½ 2 ’ā║
4s ’ĆŁ10
2s ’Ć½1
1
G╠é(s) ’ĆĮ
’ā¬
1
’ā¬ ’ā║
’ā¬
’ā½ (2s ’Ć½1)(s ’Ć½2) ’ā║
’ā╗
’ā®(4s ’ĆŁ10)(s ’Ć½ 2)’ā╣
’ā║
’ā¬ ’ā║
’ā¬
’ā¬ ’ā║
’ā¬ (2s ’Ć½1)(s ’Ć½2) ’ā║
’ĆĮ ’ā¬ ’ā║ ’ĆĮ
1
2
’ā¬
’ā½2s2
’Ć½5s ’Ć½2 ’ā║
’ā╗
2s ’Ć½5s ’Ć½2
’ā®4s2
’ĆŁ2s ’ĆŁ20’ā╣
In Matlab: n1=[4 -2 -20;0 0 1]; d1=[2 5 2]; [a,b,c,d]=tf2ss(n1,d1)](https://image.slidesharecdn.com/statespacerealizationsnew-230705024857-aa0f972e/85/State-Space-Realizations_new-pptx-26-320.jpg)
![Ex. 3.4 (cont.)
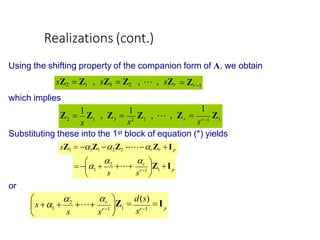
Using MATLAB: n1=[4 -2 -20;0 0 1];d1=[2 5 2];[a,b,c,d]=tf2ss(n1,d1)
yields the following realization for the 1st column of Ĝ(s):
1
1
1
c1 1 1 1 1 ’ā¬0’ā║
0.5 ’ā║
’ā¬ 0
’ā½ ’ā╗ ’ā½ ’ā╗
0 ’ā║ 1 ’ā¬0’ā║ 1
’ā╗ ’ā½ ’ā╗
1 1 1 1 1 ’ā¬
’ā½
’ĆŁ12’ā╣
x ’Ć½
’ā®2’ā╣
u
y ’ĆĮ C x ’Ć½d u ’ĆĮ
’ā®’ĆŁ6
’ĆŁ1’ā╣
x ’Ć½
’ā®1’ā╣
u
x
’Ć” ’ĆĮ A x ’Ć½b u ’ĆĮ
’ā®’ĆŁ2.5
Similarly, the function tf2ss can generate the following realization for the
2nd column of Ĝ(s):
2
2
2
2
2 2 2 2 2
c2 2 2 2 2 ’ā¬0’ā║
’ā¬1 1’ā║
’ā½ ’ā╗ ’ā½ ’ā╗
’ā╗ ’ā½ ’ā╗
’ā¬ 1 0 ’ā║ ’ā¬0’ā║
’ā½
6’ā╣
x ’Ć½
’ā®0’ā╣
u
y ’ĆĮC x ’Ć½d u ’ĆĮ
’ā®3
’ĆŁ4’ā╣
x ’Ć½
’ā®1’ā╣
u
x
’Ć” ’ĆĮ A x ’Ć½b u ’ĆĮ
’ā®’ĆŁ4](https://image.slidesharecdn.com/statespacerealizationsnew-230705024857-aa0f972e/85/State-Space-Realizations_new-pptx-27-320.jpg)
































More Related Content
Similar to State Space Realizations_new.pptx (20)
Recently uploaded (20)


















State Space Realizations_new.pptx
- 1. INSPIRING CREATIVE AND INNOVATIVE MINDS State-Space Realizations
- 2. Example 3.1 Consider: x ’Ć”(t) ’ĆĮ Ax(t) ’Ć½ Bu(t) y(t) ’ĆĮ Cx(t) ’Ć½ Du(t) x ’Ć”(t) ’ĆĮ Ax(t) ’Ć½ Bu(t) y(t) ’ĆĮ Cx(t) ’Ć½ Du(t) x(t) ’ĆĮ Px(t) Equivalent Transformation Equivalent Systems
- 3. Equivalent state equations Given state-space description: Let P be a nonsingular matrix s.t.: x ’ĆĮ Px ’āø x ’ĆĮ P-1 x x ’Ć”’ĆĮ Px’Ć” ’ĆĮ PAx ’Ć½ PBu ’ĆĮ PAP’ĆŁ1 x ’Ć½ PBu y ’ĆĮ Cx ’Ć½ Du ’ĆĮ CP’ĆŁ1 x ’Ć½ Du A ’ĆĮ PAP-1 , B ’ĆĮ PB, C ’ĆĮ CP-1 , D ’ĆĮ D x ’Ć”(t) ’ĆĮ Ax(t) ’Ć½ Bu(t); y(t) ’ĆĮ Cx(t) ’Ć½ Du(t) (**) ’āś (*) and (**) are said to be equivalent to each other and the procedure from (*) to (**) is called an equivalent transformation. x ’Ć”(t) ’ĆĮ Ax(t) ’Ć½ Bu(t) (*) y(t) ’ĆĮ Cx(t) ’Ć½ Du(t) Let
- 4. ’üä(’ü¼) ’ĆĮ ’ü¼I ’ĆŁ A The feedforward matrix D between the input and output has nothing to do with the state space and is not affected by the equivalent transformation. The characteristic equation for (*) is: For (**), we have ’üä(’ü¼) ’ĆĮ ’ü¼I ’ĆŁ A ’ĆĮ ’ü¼I ’ĆŁP’ĆŁ1 AP ’ĆĮ ’ü¼P’ĆŁ1 P’ĆŁ P’ĆŁ1 AP ’ĆĮ P’ĆŁ1 (╬╗I)P’ĆŁ P’ĆŁ1 AP ’ĆĮ P’ĆŁ1 (╬╗I ’ĆŁ A)P ’ĆĮ P P’ĆŁ1 ╬╗I ’ĆŁ A ’ĆĮ ’ü¼I’ĆŁ A Equivalent state equations have the same characteristic polynomial and hence the same set of eigenvalues. Equivalent state equations
- 5. Recall: A ’ĆĮ PAP-1 and A are similar to each other ’āś They have same eigenvalues, same stability perf. ’āś Similar transfer functions!! G(s) ’ĆĮ C(sI ’ĆŁ A)’ĆŁ1 B ’Ć½ D G(s) ’ĆĮ C(sI ’ĆŁ A)’ĆŁ1 B ’Ć½ D and G(s) ’ĆĮ G(s) To verify, G(s) ’ĆĮ C(sI ’ĆŁ A)’ĆŁ1 B ’Ć½ D (XYZ)’ĆŁ1 ’ĆĮ Z’ĆŁ1 Y’ĆŁ1 X’ĆŁ1 ’ĆĮ CP-1 (sPP’ĆŁ1 ’ĆŁ PAP’ĆŁ1 )’ĆŁ1 PB ’Ć½ D ’ĆĮ CP-1 (P(sI - A)P-1 )-1 PB ’Ć½ D ’ĆĮ CP’ĆŁ1 P(sI ’ĆŁ A)’ĆŁ1 P’ĆŁ1 PB ’Ć½ D ’ĆĮ C(sI ’ĆŁ A)’ĆŁ1 B ’Ć½ D ’ĆĮ G(s) Equivalent state equations
- 6. Example 3.2 Consider again Ex. 3.1: x1 ’ĆĮ x1 ’ā½ 2 ’ā╗ ’ā½ ’ā╗’ā½ 2 ’ā╗ ’ĆŁ1’ā║’ā¬x ’ā║ 0 ’ā╣’ā®x1 ’ā╣ ’ā¬x ’ā║ ’ā¬1 ’ā®x1 ’ā╣ ’ĆĮ ’ā®1 x(t) ’ĆĮ Px(t) From the circuit (via observation): x2 ’ĆĮ (x1 ’ĆŁ x2 )’āŚ1 Or ’ā║ ’ā¬ ’ā╣ ’ā® ’ā¬ ’ā║ ’ĆĮ ’ā¬ 1 ’ĆŁ1 1 ’ā½1 ’ĆŁ1’ā╗ ’ā®1 0 ’ā½x2 ’ā╗ x ’ā╣ ’ā½x2 ’ā╗ ’ā®x ’ā╣ ’ā║ ’ĆĮ ’ā¬ 1 ’ā║’ā¬ ’ā║ ’ā½1 ’ā®1 ’ĆŁ1’ā╗’ā½x2 ’ā╗ 0 ’ā╣’ā®x ’ā╣
- 7. Two state equations are said to be zero-state equivalent if they have the same transfer matrix or D ’Ć½ C(sI ’ĆŁ A)’ĆŁ1 B ’ĆĮ D ’Ć½ C(sI ’ĆŁ A)’ĆŁ1 B Note that: (sI ’ĆŁ A)’ĆŁ1 ’ĆĮ s’ĆŁ1 I ’Ć½ s’ĆŁ2 A’Ć½ s’ĆŁ3 A2 ’Ć½’üī Then, D ’Ć½ CBs’ĆŁ1 ’Ć½ CABs’ĆŁ2 ’Ć½ CA2 Bs’ĆŁ3 ’Ć½’üī’ĆĮ D ’Ć½ CBs’ĆŁ1 ’Ć½ CABs’ĆŁ2 ’Ć½ CA2 Bs’ĆŁ3 ’Ć½’üī Zero-State Equivalent
- 8. Zero-State Equivalent matrix iff Theorem 3.1 Two LTI state equations{A,B,C,D} and {A,B, C, D} are zero-state equivalent or have the same transfer D ’ĆĮ D and CAm B ’ĆĮ CAm B ; m ’ĆĮ 0,1,2,... - In order for two state equations to be equivalent, they must have the same dimension. - This is, however, not the case for zero-state equivalence.
- 9. Example 3.3: Consider: A ’ĆĮ B ’ĆĮ C ’ĆĮ 0 y(t) ’ĆĮ 0.5u(t) x’Ć”(t) ’ĆĮ x(t) y(t) ’ĆĮ 0.5x(t) ’Ć½ 0.5u(t) A ’ĆĮ1 ; B ’ĆĮ 0 ; C ’ĆĮ 0.5 ; D ’ĆĮ 0.5 D ’ĆĮ D ’ĆĮ 0.5 CAm B ’ĆĮ CAm B ’ĆĮ 0 Note that: ’ü£ The two systems are zero-state equivalent.~ Theorem 3.1
- 10. Companion Form ŌĆó Consider: ’ā®0’ā╣ ’ā® 3 2 ’ĆŁ1’ā╣ ’ā¬ 1 0 ’ā║x(t) ’Ć½ ’ā¬0’ā║u(t) ’ĆĮ Ax(t) ’Ć½ bu(t) ’ā║ ’ā¬ ’ā║ ’ā¬’ā½ 4 3 1 ’ā║’ā╗ ’ā¬’ā½1’ā║’ā╗ x ’Ć”(t) ’ĆĮ ’ā¬’ĆŁ 2 ŌĆó Then: ŌĆó It can be shown that: ŌĆó Can {b,Ab,A2 b} be used as the basis? ’ā× YES!
- 11. Companion Form ’ā║ 5 ’ā║ ’ā╗ ’ā¬ ’ā¬’ā½0 ’ā®0 0 17 ’ā╣ 0 ’ĆŁ15’ā║ 1 A ’ĆĮ ’ā¬1 ŌĆó Then: ŌĆó Thus the representation ofA w.r.t. the basis {b,Ab,A2 b} is:
- 12. Companion Form ’ā╗ ’ā║ ’ā½ 0 ’ā║ ’ā¬ 0 ’ā║ 0 ’ā║ 0 ’ā║ ’ā¬ 1 ; ’ā¬ 0 ’ā¬1 1 ’ā╗ ’ā½ ’ĆŁ’üĪ ’ā║ ’ĆŁ’üĪ3 ’ā║ ’ā¬ 0 ’ĆŁ’üĪ2 ’ā║ ’ā¬ 0 1 0 ’ā®0 0 0 ’ĆŁ’üĪ4 ’ā╣ ’ā®’ĆŁ’üĪ1 ’ĆŁ’üĪ2 ’ĆŁ’üĪ3 ’ĆŁ’üĪ4 ’ā╣ ’ā¬ 0 0 0 ’ā¬0 1 0 0 0 1 1 ’ā╗ ’ā¬ ’ā½ 0’ā║ 0’ā║ ; ’ā║ 1 ’ā║ ’ā¬ ’ā¬ 0 0 ’ā║ ’ā¬ 0 ’ā½ 4 2 1’ā╗ 2 3 4 ’ā¬’ĆŁ’üĪ ’ā® 0 1 0 0 ’ā╣ ’ā®’ĆŁ’üĪ1 1 0 0’ā╣ 0 1 0 1 ’ā║ 0 0 ’ā¬’ĆŁ’üĪ3 0 0 1’ā║ 0 0 ’ā¬’ĆŁ’üĪ ’ĆŁ’üĪ ’ĆŁ’üĪ ’ĆŁ’üĪ ’ā║ ’ā¬’ĆŁ’üĪ Transpose All have similar characteristic polynomial: 2 3 4 1 4 3 2 ’üä(’ü¼) ’ĆĮ ’ü¼ ’Ć½’üĪ ’ü¼ ’Ć½’üĪ ’ü¼ ’Ć½’üĪ ’ü¼ ’Ć½’üĪ ŌĆó Companion-form matrices: ŌĆó Any special? ’ĆĮ ’ü¼3 ’ĆŁ5’ü¼2 ’Ć½15’ü¼ ’ĆŁ17 ’ĆĮ 0 (’ü¼ ’ĆŁ3) ’ĆŁ 2 1 2 (’ü¼ ’ĆŁ1) 0 ’ĆŁ 4 ’ĆŁ3 (’ü¼ ’ĆŁ1) ’üä(’ü¼) ’ĆĮ ’ü¼I ’ĆŁ A ’ĆĮ A ’ĆĮ ’ā¬1 ’é┤(-1) ’é┤(-1) ’ā®0 0 17 ’ā╣ ’ā¬ 0 ’ĆŁ15’ā║ ’ā║ ’ā¬’ā½0 1 5 ’ā║ ’ā╗ ’é┤(-1)
- 13. Realizations Q. What is "realization"? space equation ŌĆō Implicitly implies LTI systems ŌĆō Shall start with multi-variable systems and will sometimes specialize to single-variable systems x ’Ć”(t) ’ĆĮ Ax(t) ’Ć½ Bu(t) y(t) ’ĆĮ Cx(t) ’Ć½ Du(t) D(s) ŌĆō For a givenG╠é(s) ’ĆĮ N(s) , find a corresponding state-
- 14. Q. If ─£(s) is realizable, how many possible realizations? ŌĆō Infinite ~ in view of equivalent transformations and the possibility of adding un-controllable or un-observable components Q. Which one is the "good" realization? - A ŌĆ£goodŌĆØ realization is the one with the minimal order ~ Irreducible realization ’ā× Will be discussed in Topic 6 Realizations (cont.)
- 15. Realizations (cont.) Q. Under what condition is ─£(s) realizable by an LTI system? -Recall that the transfer function of the dynamic equation is G╠é(s) ’ĆĮ C(sI ’ĆŁ A)’ĆŁ1 B ’Ć½ D ’ĆĮ C(sI ’ĆŁ A)’ĆŁ1 B ’Ć½ D ─£(s) is realizable by a dynamic equation iff it is a proper rational function (order of numerator ’éŻ order of denominator) ’ā× In fact, the part contributed by C(sI - A)-1B is strictly proper Theorem 3.2
- 16. Realizations (cont.) as: G╠é sI ’ĆŁ A (s) :’ĆĮ C(sI ’ĆŁ A)’ĆŁ1 B ’ĆĮ 1 C’üøAdj.(sI ’ĆŁ A)’üØB sp To determine the realization of G╠é(s) , decompose it G╠é(s) ’ĆĮ G╠é(’éź)’Ć½G╠ésp (s) where r r’ĆŁ1 1 d(s) ’ĆĮ s ’Ć½’üĪ s ’Ć½’üī’Ć½ ’üĪr’ĆŁ1s ’Ć½’üĪr Let i.e. least common denominator of all entries of G╠ésp (s).
- 17. Nr ’ĆŁ1 y ’ĆĮ ’üøN1 N2 ’üī Nr ’üØx’Ć½G╠é(’éź)u ’ā¬ ’ā║ ’ā¬ 0 ’ā║ ’ā¬ ’ā║ ’ā¬ ’ā½0 ’ā║ ’ā╗ ’ā║x ’Ć½ ’ā¬ 0 ’ā║u ’ā║ ’ā║ ’ā║ ’ā║ ’ā╗ ’ā¬ ’ā¬ ’ā¬ ’ā¬ ’ā½ ’ā¬ ’üŹ ’ā║ 0 ’üŹ 0 x ’Ć”’ĆĮ ’ā¬ ’ā®Ip ’ā╣ p Realizations (cont.) ~Block companion form ’ā®’ĆŁ’üĪ1Ip ’ĆŁ’üĪ2I p ’üī ’ĆŁ’üĪr’ĆŁ1Ip ’ĆŁ’üĪrIp ’ā╣ ’ā¬ I 0 ’üī 0 0 ’ā║ Ip ’üī 0 0 ’üŹ ’üŹ ’üŹ 0 ’üī Ip 0 (rp’é┤rp) (rp’é┤p) (q’é┤ rp) where Ip is the p’é┤ p unit matrix and every 0 is a p’é┤ p zero matrix. Then the realization of G╠é(s) is given by
- 18. Realizations (cont.) Proof: Define, ’ā®Z1 ’ā╣ ’ā¬Z ’ā║ Z :’ĆĮ ’ā¬ 2 ’ā║ :’ĆĮ (sI ’ĆŁ A)’ĆŁ1 B ’ā¬ Z ’ā║ ’ā½ r ’ā╗ ’ā¬ ’üŹ ’ā║ i where Z is the (p’é┤p) and Z is a (rp’é┤p). Simplifying, Then, (sI ’ĆŁ A)Z ’ĆĮ B ’ā× sZ ’ĆĮ AZ’Ć½ B (*) ’ā¬ ’ā║ ’ā║ ’ā¬ ’ā║ ’ā║’ā¬ ’ā║’ā¬ ’ā¬ ’ā¬ ’ā¬ ’ā¬ ’ā½ ’ā¬ ’ā║ ’ā¬ ’ā¬ ’ā½0 ’ā║ ’ā╗ ’ā║’ā¬Z ’ā║ ’ā¬ 0 ’ā║ 0 ’ā║’ā¬ ’ā║ ’ā¬ ’ā║ ’üŹ ’üŹ ’üŹ ’üī 0 0 ’üŹ 0 ’ā¬ ’üŹ ’ā║ ’ā®Ip ’ā╣ ’ā║’ā╗’ā¬’ā½Zr ’ā║ ’ā╗ p ’ā¬’ā½sZr ’ā║ ’ā╗ ’ā¬sZ ’ā║ 0 ’ā║’ā¬Z3 ’ā║ ’Ć½ ’ā¬ 0 ’ā║ 2 ’ā║ ’ā¬sZ3 ’ā║ ’ĆĮ ’ā¬ 2 ’ā║ ’ā®sZ1 ’ā╣ ’ĆŁ’üĪrIp ’ā╣’ā®Z1 ’ā╣ ’ā®’ĆŁ’üĪ1Ip ’ĆŁ’üĪ2I p ’üī ’ĆŁ’üĪr’ĆŁ1Ip ’ā¬ I 0 ’üī 0 Ip ’üī 0 ’üŹ ’üŹ 0 Ip
- 19. Realizations (cont.) Using the shifting property of the companion form of A, we obtain Substituting these into the 1st block of equation (*) yields which implies ’ĆĮ Zr ’ĆŁ1 sZ2 ’ĆĮ Z1 , sZ3 ’ĆĮ Z2 , ’üī , sZr sZ1 ’ĆĮ ’ĆŁ’üĪ1Z1 ’ĆŁ’üĪ2Z2 ’ĆŁ’üī’ĆŁ’üĪrZr ’Ć½Ip 1 3 2 1 Z 1 r 1 sr ’ĆŁ1 s2 s Z ’ĆĮ 1 Z , Z ’ĆĮ 1 Z , ’üī , Z ’ĆĮ p r s s ’āĘ ’āĖ ’ā¦ ’ā© ’ā” 1 r’ĆŁ1 2 1 ’üĪ ’üĪ ’ĆĮ ’ĆŁ ’üĪ ’Ć½ ’Ć½’üī’Ć½ ’āČZ ’Ć½I or p r s s ’āĘ ’āĖ ’ā¦ ’ā© ’ā” sr ’ĆŁ1 1 r’ĆŁ1 2 1 ’üĪ ’āČZ ’ĆĮ d(s) ’ĆĮ I ’üĪ s ’Ć½’üĪ ’Ć½ ’Ć½’üī’Ć½
- 20. Realizations (cont.) Thus we have, Then, ╦å 1 2 1 C(sI ’ĆŁ A)’ĆŁ1 B ’Ć½ G╠é(’éź) ’ĆĮ ’üØ’Ć½G(’éź) r r’ĆŁ2 r’ĆŁ1 ’Ć½ N s ’üøNs d(s) ’Ć½’üī’Ć½ N 1 Z1 ’ĆĮ d(s) Ip sr ’ĆŁ2 sr ’ĆŁ1 , Z2 ’ĆĮ d(s) Ip , ’üī , Zr ’ĆĮ d(s) Ip ’ĆĮ G╠ésp (s)’Ć½G╠é(’éź) ’ĆĮ G╠é(s)
- 21. Special Case: p = 1 Realizations (cont.) (For simplicity, let r = 4 and q =2.) Then, the realization is Consider a 2’é┤1 proper rational matrix: ’ā╣ ’ā® ’āŚ’ā¬ 22 23 3 ’ā½ 21 24 ’ā╗ 14 ’ā║ 13 2 12 3 11 4 3 2 1 2 4 3 2 ╦å ’üó s ’Ć½ ’üó s2 ’Ć½ ’üó s ’Ć½ ’üó s ’Ć½ ’üó s ’Ć½ ’üó ’üó s ’Ć½ ’üó s ’Ć½’üĪ s ’Ć½’üĪ s ’Ć½’üĪ s ’Ć½’üĪ ’ā½d ’ā╗ ’ā®d1 ’ā╣ 1 G(s) ’ĆĮ ’ā¬ ’ā║ ’Ć½ ’ā¬d ’ā║ ’ā½ 2 ’ā╗ 24 ’ā╗ 23 22 ’ā½ 21 ’üó ’ā║ ’üó ’üó ’ā¬’üó ’üó14 ’ā╣ x ’Ć½ ’ā®d1 ’ā╣ u y ’ĆĮ ’ā®’üó11 ’üó12 ’üó13 ’ā½ ’ā╗ ’ā½0’ā╗ ’ā®1’ā╣ 0 ’ā║ ’ā¬0’ā║ 0 ’ā║ ’ā¬ ’ā║ ’ā¬ 0 ’ā¬ 0 0 ’ā║ ’ā¬0’ā║ ’ā║x ’Ć½ ’ā¬ ’ā║u ’ā®’ĆŁ’üĪ1 ’ĆŁ’üĪ2 ’ĆŁ’üĪ3 ’ĆŁ’üĪ4 ’ā╣ ’ā¬ 1 0 0 1 0 0 1 x ’Ć”’ĆĮ ’ā¬ Note: The controllable- canonical-form realization can be read out from the coefficients of G╠é(s).
- 22. Realizations (cont.) ŌĆó A multi-input LTI system is the sum of many single-input LTI systems, so can realize each single-input subsystem and form the sum: 1st and 2nd column of
- 23. ’ā║ ’ā╣ ’ā¬ ’ā¬ ’ā½ ’ā╗ 3 ’ĆŁ12 ’ā¬0 0’ā║ 0’ā╣ ’Ć½ ’ā¬ ’ĆĮ ’ā®2 (s ’Ć½ 2)2 ’ā║ ’ā╗ s ’Ć½1 ’ā║ ’ā¬’ā½(2s’Ć½1)(s ’Ć½ 2) s ’Ć½ 2 ’ā║ 2s ’Ć½1 1 ’ĆĮ G╠é(’éź)’Ć½G╠ésp (s) Example 3.3: 3 ’ā║ ’ā¬ ’ā¬ ’ā® (s ’Ć½ 2)2 ’ā║ ’ā╗ ’ā╣ s ’Ć½1 ’ā║ ’ā¬’ā½(2s’Ć½1)(s ’Ć½ 2) s ’Ć½ 2 ’ā║ , 4s ’ĆŁ10 2s ’Ć½1 1 G╠é(s) ’ĆĮ ’ā¬ Consider a proper rational matrix ’ā║ ’ā¬ ’ā║ ’ā¬ ’ā® ’ā╣ ’ā® ’ā¬ ’ā½(2s ’Ć½1)(s ’Ć½ 2) (s ’Ć½ 2)2 ’ā║ ’ā╗ s ’Ć½ 2 ’ā║ 2s ’Ć½1 1 s ’Ć½1 4s ’ĆŁ10 3 G╠é(s) ’ĆĮ ’ā¬ Determine a realization of this transfer matrix. Solution: Decompose G╠é(s) into a strictly proper rational matrix d(s) ’ĆĮ (s ’Ć½0.5)(s ’Ć½ 2)2 ’ĆĮ s3 ’Ć½ 4.5s2 ’Ć½6s ’Ć½ 2 The monic least common denominator of G╠ésp (s) is
- 24. ’ā╗ ’ā¬ ’ā½ ’ĆĮ 1 ╦å (s ’Ć½1)(s’Ć½0.5) ’ā║ 0.5(s’Ć½ 2) 3(s ’Ć½2)(s ’Ć½0.5)’ā╣ ’ā®’ĆŁ6(s ’Ć½2)2 s3 ’Ć½4.5s2 ’Ć½6s ’Ć½2 sp G Example (cont.) Thus ’ā║ ’ā╗ ’ā½ ’ĆĮ 2 (s ’Ć½1.5s ’Ć½0.5) 3(s2 ’Ć½2.5s’Ć½1) ’ā╣ 1 ’ā®’ĆŁ6(s2 ’Ć½4s ’Ć½4) d(s) ’ā¬ 0.5(s’Ć½ 2) ’ā║ ’ā½ ’ĆĮ 2 s ’Ć½1.5s ’Ć½0.5’ā╗ 3s2 ’Ć½7.5s’Ć½3’ā╣ 1 ’ā®’ĆŁ6s2 ’ĆŁ24s ’ĆŁ24 d(s) ’ā¬ 0.5s ’Ć½1 ’ā║’āĘ ’ā║ ’ā¬ ’ā║ ’ā¬ ’ā¦’ā¬ ’ĆĮ 0.5’ā╗’āĖ 1.5’ā╗ ’ā½ 1 ’ā½ 0.5 ’ā®’ĆŁ24 ’ā”’ā®’ĆŁ 6 3’ā╣ 1 2 7.5’ā╣ s’Ć½ ’ā®’ĆŁ24 3 ’ā╣’āČ s ’Ć½ d(s) ’ā©’ā½ 0 1’ā╗
- 25. ’ā╣’ā® ’ā╣ ’ā╗ ’ā½ ’ā╣ ’ā® ’ā½ ’ā╗’ā½ 2 ’ā╗ 1 0.5’ā║ ’ā¬ 0 ’ā¬0 0’ā║’ā¬u ’ā║ 2 0 u x’Ć½ y ’ĆĮ ’ā®’ĆŁ6 Example (cont.) Given, ’ā¬ ’ā║ ’ā║ ’ā¬ ’ā║ ’ā¬ ’ā║ ’ā║ ’ā¬ ’ā║ ’ā¬ ’ā½ ’ā¬’ā½0 0’ā║’ā╗ ’ā¬0 1’ā║ 0 1 0 0 0 0 1 0 0 ’ā║ ’ā╗ 0 0 0 1 ’ā¬ ’ā¬ ’ā¬ 1 0 0 ’ĆŁ6 0 ’ĆŁ2 0 ’ā╣ ’ā®1 0’ā╣ 0 ’ĆŁ4.5 0 ’ĆŁ6 0 ’ĆŁ2’ā║ ’ā®’ĆŁ4.5 0’ā║’ā½u2 ’ā╗ 0 0 0 0 ’ā║ ’ā¬0 0’ā║’ā®u1 ’ā╣ 0 0 0 0 ’ā║ 0 ’ā║ ’ā¬ 0 ’ā║ ’ā¬0 0’ā║ x’Ć½ x ’Ć”’ĆĮ ’ā¬ ’ā¬ ’ā¬ ’ā¬ 3 ’ā║ ’ā¬ ’ā¬ ’ā® (s ’Ć½ 2)2 ’ā║ ’ā╗ ’ā╣ s ’Ć½1 ’ā║ ’ā¬’ā½(2s’Ć½1)(s ’Ć½ 2) s ’Ć½ 2 ’ā║ , 4s ’ĆŁ10 2s ’Ć½1 1 G╠é(s) ’ĆĮ ’ā¬ A B 3 ’ĆŁ24 7.5 ’ĆŁ24 3 1 0.5 C 1.5 1 D G╠é(s) ’ĆĮ ’ü╗A,B,C,D’üĮ B’ā╣ ’ā║ ’ā¬ ’ā½C D’ā╗ S ’ĆĮ ’ā®A Realization the realization is,
- 26. Example 3.4: ’ā╣ ’ā║ ’ā║ ’ā¬ ’ā║ ’ā¬ ’ā® ’ā¬’ā½(2s’Ć½1)(s ’Ć½ 2)’ā║ ’ā╗ 4s ’ĆŁ10 2s ’Ć½1 1 ’ā¬ (s) ’ĆĮ c1 G╠é The 1st column is Consider again the proper rational matrix in Ex. 3.3. ’ā║ ’ā║ ’ā╣ ’ā¬ ’ā¬ ’ā® 3 (s ’Ć½ 2)2 ’ā║ ’ā╗ s ’Ć½1 ’ā¬’ā½(2s ’Ć½1)(s ’Ć½ 2) s ’Ć½ 2 ’ā║ 4s ’ĆŁ10 2s ’Ć½1 1 G╠é(s) ’ĆĮ ’ā¬ 1 ’ā¬ ’ā║ ’ā¬ ’ā½ (2s ’Ć½1)(s ’Ć½2) ’ā║ ’ā╗ ’ā®(4s ’ĆŁ10)(s ’Ć½ 2)’ā╣ ’ā║ ’ā¬ ’ā║ ’ā¬ ’ā¬ ’ā║ ’ā¬ (2s ’Ć½1)(s ’Ć½2) ’ā║ ’ĆĮ ’ā¬ ’ā║ ’ĆĮ 1 2 ’ā¬ ’ā½2s2 ’Ć½5s ’Ć½2 ’ā║ ’ā╗ 2s ’Ć½5s ’Ć½2 ’ā®4s2 ’ĆŁ2s ’ĆŁ20’ā╣ In Matlab: n1=[4 -2 -20;0 0 1]; d1=[2 5 2]; [a,b,c,d]=tf2ss(n1,d1)
- 27. Ex. 3.4 (cont.) Using MATLAB: n1=[4 -2 -20;0 0 1];d1=[2 5 2];[a,b,c,d]=tf2ss(n1,d1) yields the following realization for the 1st column of G╠é(s): 1 1 1 c1 1 1 1 1 ’ā¬0’ā║ 0.5 ’ā║ ’ā¬ 0 ’ā½ ’ā╗ ’ā½ ’ā╗ 0 ’ā║ 1 ’ā¬0’ā║ 1 ’ā╗ ’ā½ ’ā╗ 1 1 1 1 1 ’ā¬ ’ā½ ’ĆŁ12’ā╣ x ’Ć½ ’ā®2’ā╣ u y ’ĆĮ C x ’Ć½d u ’ĆĮ ’ā®’ĆŁ6 ’ĆŁ1’ā╣ x ’Ć½ ’ā®1’ā╣ u x ’Ć” ’ĆĮ A x ’Ć½b u ’ĆĮ ’ā®’ĆŁ2.5 Similarly, the function tf2ss can generate the following realization for the 2nd column of G╠é(s): 2 2 2 2 2 2 2 2 2 c2 2 2 2 2 ’ā¬0’ā║ ’ā¬1 1’ā║ ’ā½ ’ā╗ ’ā½ ’ā╗ ’ā╗ ’ā½ ’ā╗ ’ā¬ 1 0 ’ā║ ’ā¬0’ā║ ’ā½ 6’ā╣ x ’Ć½ ’ā®0’ā╣ u y ’ĆĮC x ’Ć½d u ’ĆĮ ’ā®3 ’ĆŁ4’ā╣ x ’Ć½ ’ā®1’ā╣ u x ’Ć” ’ĆĮ A x ’Ć½b u ’ĆĮ ’ā®’ĆŁ4
- 28. Example 3.4 (cont.) Notice that: ’ā║ ’ā║ ’ā╣ ’ā¬ ’ā¬ ’ā® 3 (s ’Ć½ 2)2 ’ā║ ’ā╗ s ’Ć½1 ’ā¬ ’ā½(2s ’Ć½1)(s ’Ć½ 2) s ’Ć½ 2 ’ā║ 2s ’Ć½1 1 4s ’ĆŁ10 G╠é(s) ’ĆĮ ’ā¬
- 29. Ex. 3.4 (cont.) ’ā½ 2 ’ā╗ ’ā½ 2 ’ā╗’ā½ 2 ’ā╗ ’ā½ 2 ’ā╗’ā½ 2 ’ā╗ ’ā¬x’Ć” ’ā║ ’ā¬ 0 A ’ā║’ā¬x ’ā║ ’ā¬ 0 b ’ā║’ā¬u ’ā║ These two realizations can be combined as ’ā®x’Ć”1’ā╣ ’ĆĮ ’ā®A1 0 ’ā╣’ā®x1 ’ā╣ ’Ć½ ’ā®b1 0 ’ā╣’ā®u1 ’ā╣ y ’ĆĮ yc1 ’Ć½yc2 ’ĆĮ ’üøC1 C2 ’üØx’Ć½’üød1 d2 ’üØu or u ’ā╗ ’ā¬ ’ā║ ’ā½ ’ā║ ’ā¬ ’ā║ x’Ć½ ’ā║ ’ā║ ’ā¬ ’ā¬ ’ā¬ ’ā¬ ’ā½ x’Ć½ ’ā║u 0 0 y ’ĆĮ ’ā¬ 0 ’ā®’ĆŁ6 ’ĆŁ12 3 6’ā╣ ’ā®2 0’ā╣ 1 ’ā¬0 1’ā║ 0 0 ’ĆŁ4 ’ĆŁ4’ā║ 0 0 ’ā╗ 0 ’ā║ ’ā¬0 0’ā║ 0 1 ’ĆŁ1 0 0 ’ā╣ ’ā®1 0’ā╣ 0 ’ā®’ĆŁ2.5 x ’Ć”’ĆĮ ’ā¬ ’ā║ ’ā║ ’ā║ ’ā¬ ’ā║ ’ā╗ ’ā¬ ’ā½ ’ā¬ ’ā¬ ’ā¬ ’ā¬ ’ā¬ ’ā¬ ’ā¬ ’ā¬ ’ā½ 2 ’ā╗ ’ā║ 0 ’ā¬0 1’ā║ 0 ’ā║ ’ā¬0 0’ā║ 0 ’ā║ ’ā¬0 1 0 ’ĆŁ2’ā║ 0 ’ā╣ ’ā®1 0’ā╣ 0 ’ĆŁ6 0 ’ĆŁ2 0 ’ĆŁ4.5 0 ’ĆŁ6 0 ’ā®’ĆŁ 4.5 0’ā║’ā¬u ’ā║ 0 0 0 0 0 ’ā║ ’ā¬0 x’Ć½ 1 0 0 0 x ’Ć”’ĆĮ ’ā║’ā¬ ’ā║ ’ā¬ ’ā½ ’ā╗ ’ā½ ’ā╗’ā½ 2 ’ā╗ 0.5’ā║ ’ā¬ 0 0 0 1 0 0 ’ā║ ’ā¬ 0 0 0 1 0 0 0 3 ’ĆŁ24 7.5 ’ĆŁ24 1 0.5 1.5 1 u ’ā║ ’ā╗ 0’ā╣’ā®u1 ’ā╣ 3 ’ā╣ x ’Ć½ ’ā®2 y ’ĆĮ ’ā®’ĆŁ6 A (4 0x4) 1 B ( ’ā½ 4 0x20’ā╗) 0 C .5 1 (2x4) ’ā╗ ’ā½ D (2x2) A (6x6) B0’ā║’ā®u1’ā╣ (’ā¬6x2’ā║)’ā½ C (2x6) 0 D 0 (2x2)
- 30. Example 3.4 (cont.) ŌĆó Can also focus on the realizations of single-output systems. Then treat LTI systems with multi-outputs as combinations of single-outputs subsystems. ŌĆó i-th row of ŌĆó Overall realization: ’ā¬ ’ā¬’ā½0 ’ā¬ ’ā¬’ā½0 ’ā║ ’ā¬ ’ā║ cq ’ā║ ’ā╗ ’ā¬’ā½dq ’ā║ ’ā╗ ’ā║ ’ā¬ ’ā║ Aq ’ā║ ’ā╗ ’ā¬’ā½Bq ’ā║ ’ā╗ ’ā║x ’Ć½ ’ā¬ ’üŹ ’ā║u x ’Ć”’ĆĮ ’ā¬ Realize with {Ai, Bi, ci, di} ’ā®c1 0 ’ā╣ ’ā®d1 ’ā╣ 0 ’ā╣ ’ā®B1 ’ā╣ ’ā®A1 ’üÅ ’ā║x ’Ć½ ’ā¬ ’üŹ ’ā║u ;y ’ĆĮ ’ā¬ ’üÅ