Tangible bots 1016
Download as pptx, pdf0 likes342 views
This document discusses using Pololu 3pi robots and XBee hardware to create tangible bots for interaction with tabletop interfaces, specifically for an upper-limb rehabilitation system called PhysiCube. Related examples of these tangible bots in use can be found online.
1 of 19
Download to read offline









More Related Content
Featured (20)
PDF
Artificial Intelligence, Data and Competition ¨C SCHREPEL ¨C June 2024 OECD dis...OECD Directorate for Financial and Enterprise Affairs?
PDF
Social Media Marketing Trends 2024 // The Global Indie InsightsKurio // The Social Media Age(ncy)?
Artificial Intelligence, Data and Competition ¨C SCHREPEL ¨C June 2024 OECD dis...OECD Directorate for Financial and Enterprise Affairs
?
Tangible bots 1016
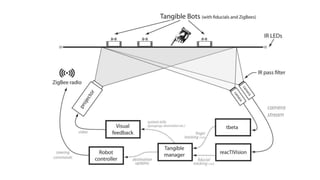
- 1. Tangible Bots Interaction with Active Tangibles in Tabletop Interfaces
- 2. Hardware ? Pololu 3pi robots2 ? XBee
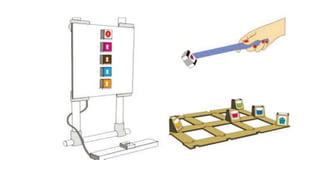
- 13. PhysiCube providing tangible interaction in a pervasive upper-limb rehabilitation system
- 14. Hardware