Thesis work presentation
0 likes268 views

La tesi di Luca Piccinelli sviluppa un'interfaccia uomo-macchina basata su gesti delle mani, affrontando problemi di localizzazione, tracciamento e riconoscimento delle configurazioni della mano. Propone diverse soluzioni, tra cui algoritmi di rilevamento della pelle e tracciamento di blob per l'identificazione delle traiettorie eseguite dall'utente. Viene presentato anche il riconoscimento delle configurazioni della mano con un'analisi basata sulla mappatura delle punte delle dita e test di classificazione delle gestualitĂ .
Thesis work presentation
- 1. ÂŽ UNIVERSITA DEGLI STUDI DI MILANO BICOCCA ÂŽ FACOLTA DI SCIENZE MATEMATICHE FISICHE E NATURALI Dipartimento di Informatica Sistemistica e Comunicazione Corso di Laurea Magistrale in Informatica DEVELOPMENT OF A HUMAN-COMPUTER INTERFACE BASED ON HAND GESTURES Relatore: Raimondo Schettini Correlatore: Gianluigi Ciocca Tesi di laurea di: Luca Piccinelli
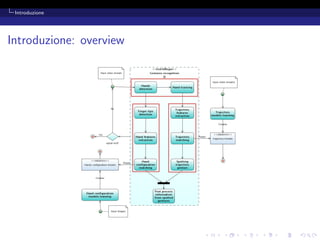
- 2. Introduzione Introduzione La tesi si inserisce nellâambito di ricerca HCI. Problema generale: riconoscimento di data pattern. Nello speciïŹco: localizzazione e tracciamento delle mani; riconoscimento di traiettorie eseguite dallâutente, utilizzando le mani. riconoscimento di conïŹgurazioni assunte dalla mano;
- 4. Tracciamento delle mani Tracciamento delle mani Sottoproblemi: localizzare (dimensione spaziale); tracciare (dimensione temporale). Soluzioni proposte: localizzazione immagine residua; rilevamento della pelle; tracciamento tracciamento di blob.
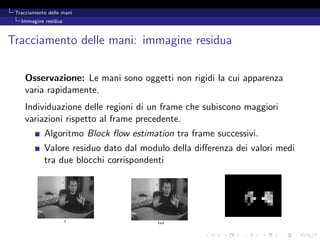
- 5. Tracciamento delle mani Immagine residua Tracciamento delle mani: immagine residua Osservazione: Le mani sono oggetti non rigidi la cui apparenza varia rapidamente. Individuazione delle regioni di un frame che subiscono maggiori variazioni rispetto al frame precedente. Algoritmo Block ïŹow estimation tra frame successivi. Valore residuo dato dal modulo della diïŹerenza dei valori medi tra due blocchi corrispondenti
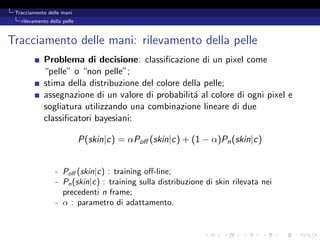
- 6. Tracciamento delle mani rilevamento della pelle Tracciamento delle mani: rilevamento della pelle Problema di decisione: classiïŹcazione di un pixel come âpelleâ o ânon pelleâ; stima della distribuzione del colore della pelle; assegnazione di un valore di probabilitÂŽ al colore di ogni pixel e a sogliatura utilizzando una combinazione lineare di due classiïŹcatori bayesiani: P(skin|c) = αPoïŹ (skin|c) + (1 â α)Pn (skin|c) - PoïŹ (skin|c) : training oïŹ-line; - Pn (skin|c) : training sulla distribuzione di skin rilevata nei precedenti n frame; - α : parametro di adattamento.
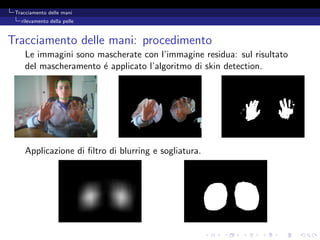
- 7. Tracciamento delle mani rilevamento della pelle Tracciamento delle mani: procedimento Le immagini sono mascherate con lâimmagine residua: sul risultato del mascheramento ÂŽ applicato lâalgoritmo di skin detection. e Applicazione di ïŹltro di blurring e sogliatura.
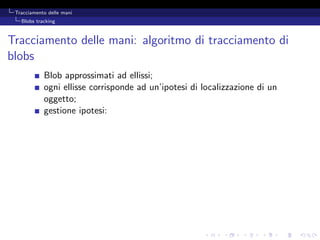
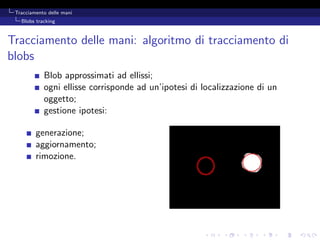
- 8. Tracciamento delle mani Blobs tracking Tracciamento delle mani: algoritmo di tracciamento di blobs Blob approssimati ad ellissi; ogni ellisse corrisponde ad unâipotesi di localizzazione di un oggetto; gestione ipotesi:
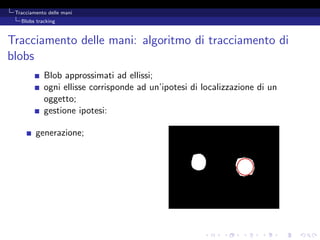
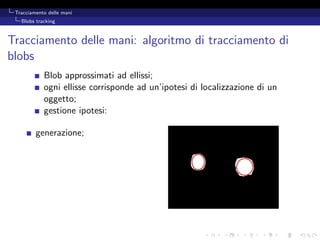
- 9. Tracciamento delle mani Blobs tracking Tracciamento delle mani: algoritmo di tracciamento di blobs Blob approssimati ad ellissi; ogni ellisse corrisponde ad unâipotesi di localizzazione di un oggetto; gestione ipotesi: generazione;
- 10. Tracciamento delle mani Blobs tracking Tracciamento delle mani: algoritmo di tracciamento di blobs Blob approssimati ad ellissi; ogni ellisse corrisponde ad unâipotesi di localizzazione di un oggetto; gestione ipotesi: generazione;
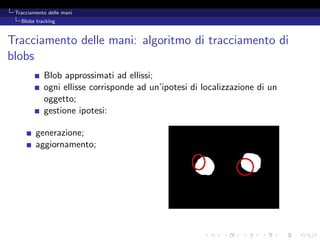
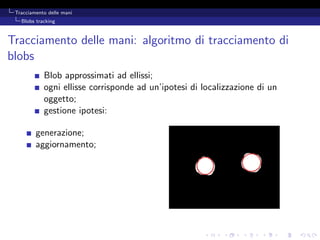
- 11. Tracciamento delle mani Blobs tracking Tracciamento delle mani: algoritmo di tracciamento di blobs Blob approssimati ad ellissi; ogni ellisse corrisponde ad unâipotesi di localizzazione di un oggetto; gestione ipotesi: generazione; aggiornamento;
- 12. Tracciamento delle mani Blobs tracking Tracciamento delle mani: algoritmo di tracciamento di blobs Blob approssimati ad ellissi; ogni ellisse corrisponde ad unâipotesi di localizzazione di un oggetto; gestione ipotesi: generazione; aggiornamento;
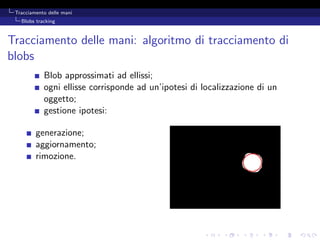
- 13. Tracciamento delle mani Blobs tracking Tracciamento delle mani: algoritmo di tracciamento di blobs Blob approssimati ad ellissi; ogni ellisse corrisponde ad unâipotesi di localizzazione di un oggetto; gestione ipotesi: generazione; aggiornamento; rimozione.
- 14. Tracciamento delle mani Blobs tracking Tracciamento delle mani: algoritmo di tracciamento di blobs Blob approssimati ad ellissi; ogni ellisse corrisponde ad unâipotesi di localizzazione di un oggetto; gestione ipotesi: generazione; aggiornamento; rimozione.
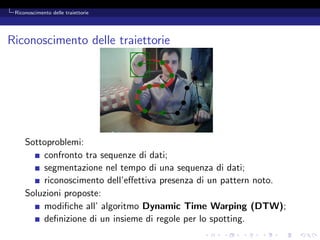
- 15. Riconoscimento delle traiettorie Riconoscimento delle traiettorie Sottoproblemi: confronto tra sequenze di dati; segmentazione nel tempo di una sequenza di dati; riconoscimento dellâeïŹettiva presenza di un pattern noto. Soluzioni proposte: modiïŹche allâ algoritmo Dynamic Time Warping (DTW); deïŹnizione di un insieme di regole per lo spotting.
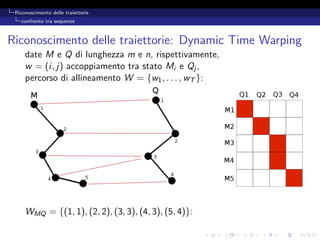
- 16. Riconoscimento delle traiettorie confronto tra sequenze Riconoscimento delle traiettorie: Dynamic Time Warping date M e Q di lunghezza m e n, rispettivamente, w = (i, j) accoppiamento tra stato Mi e Qj , percorso di allineamento W = {w1 , . . . , wT }: WMQ = {(1, 1), (2, 2), (3, 3), (4, 3), (5, 4)}:
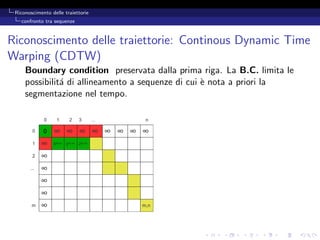
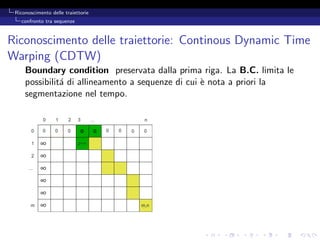
- 17. Riconoscimento delle traiettorie confronto tra sequenze Riconoscimento delle traiettorie: Continous Dynamic Time Warping (CDTW) Boundary condition preservata dalla prima riga. La B.C. limita le possibilitÂŽ di allineamento a sequenze di cui ` nota a priori la a e segmentazione nel tempo.
- 18. Riconoscimento delle traiettorie confronto tra sequenze Riconoscimento delle traiettorie: Continous Dynamic Time Warping (CDTW) Boundary condition preservata dalla prima riga. La B.C. limita le possibilitÂŽ di allineamento a sequenze di cui ` nota a priori la a e segmentazione nel tempo.
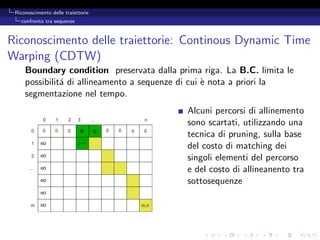
- 19. Riconoscimento delle traiettorie confronto tra sequenze Riconoscimento delle traiettorie: Continous Dynamic Time Warping (CDTW) Boundary condition preservata dalla prima riga. La B.C. limita le possibilitÂŽ di allineamento a sequenze di cui ` nota a priori la a e segmentazione nel tempo. Alcuni percorsi di allinemento sono scartati, utilizzando una tecnica di pruning, sulla base del costo di matching dei singoli elementi del percorso e del costo di allineanento tra sottosequenze
- 20. Riconoscimento delle traiettorie confronto tra sequenze Riconoscimento delle traiettorie: spotting Lâalgoritmo CDTW fornisce il miglior allineamento e il corrispondente costo tra la serie di dati osservati e tutti i modelli memorizzati; nulla viene calcolato riguardo lâeïŹettiva osservazione di uno dei modelli; si deïŹniscono una serie di regole per veriïŹcare lâoccorrenza di una traiettoria nota sulla base di: costo di matching; intersezione temporale tra candidati allo spotting; intersezione temporale tra candidati allo spotting e tra nuove ipotesi di allineamento con altri modelli.
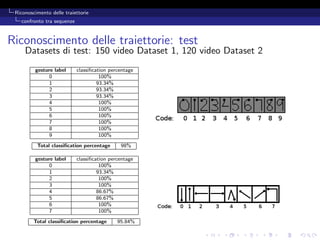
- 21. Riconoscimento delle traiettorie confronto tra sequenze Riconoscimento delle traiettorie: test Datasets di test: 150 video Dataset 1, 120 video Dataset 2 gesture label classiïŹcation percentage 0 100% 1 93.34% 2 93.34% 3 93.34% 4 100% 5 100% 6 100% 7 100% 8 100% 9 100% Total classiïŹcation percentage 98% gesture label classiïŹcation percentage 0 100% 1 93.34% 2 100% 3 100% 4 86.67% 5 86.67% 6 100% 7 100% Total classiïŹcation percentage 95.84%
- 22. Riconoscimento della conïŹgurazione della mano Riconoscimento della conïŹgurazione della mano Problema: riconoscere la conïŹgurazione assunta da una mano. Per conïŹgurazione si intende il numero di dita mostrate e lâangolazione della mano. Soluzione proposta: mappatura delle punte delle dita; costruzione di un istrogramma caratteristico.
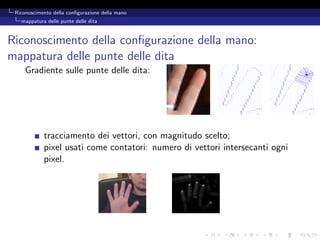
- 23. Riconoscimento della conïŹgurazione della mano mappatura delle punte delle dita Riconoscimento della conïŹgurazione della mano: mappatura delle punte delle dita Gradiente sulle punte delle dita: tracciamento dei vettori, con magnitudo scelto; pixel usati come contatori: numero di vettori intersecanti ogni pixel.
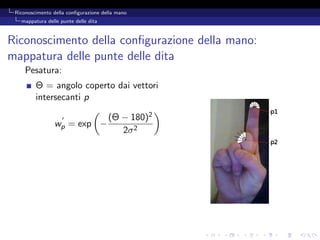
- 24. Riconoscimento della conïŹgurazione della mano mappatura delle punte delle dita Riconoscimento della conïŹgurazione della mano: mappatura delle punte delle dita Pesatura:
- 25. Riconoscimento della conïŹgurazione della mano mappatura delle punte delle dita Riconoscimento della conïŹgurazione della mano: mappatura delle punte delle dita Pesatura: Î = angolo coperto dai vettori intersecanti p (Î â 180)2 wp = exp â 2Ï 2
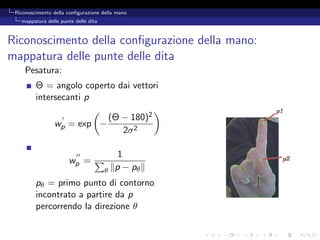
- 26. Riconoscimento della conïŹgurazione della mano mappatura delle punte delle dita Riconoscimento della conïŹgurazione della mano: mappatura delle punte delle dita Pesatura: Î = angolo coperto dai vettori intersecanti p (Î â 180)2 wp = exp â 2Ï 2 1 wp = Ξ p â pΞ pΞ = primo punto di contorno incontrato a partire da p percorrendo la direzione Ξ
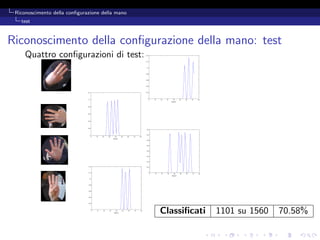
- 27. Riconoscimento della conïŹgurazione della mano test Riconoscimento della conïŹgurazione della mano: test Quattro conïŹgurazioni di test: ClassiïŹcati 1101 su 1560 70.58%
- 28. Conclusioni e sviluppi futuri Conclusioni e sviluppi futuri Conclusioni: Sviluppi futuri: Si sono implementati algoritmi background substraction per per: sostituire lâimmagine residua; tracciamento delle mani; miglioramento della stima del riconoscimento gradiente, per una pi` robusta u dellâesecuzione di rilevazione delle dita; traiettorie note; miglioramento Si sono proposti e dellâapprendimento dei modelli; implementati metodi per: test su piÂŽ utenti. u riconoscimento della conïŹgurazione delle mani;