TileDB
•Download as PPT, PDF•
1 like•215 views

TileDB is a novel storage manager for multi-dimensional arrays that organizes array elements into ordered collections called fragments. This allows TileDB to efficiently support both dense and sparse arrays through sequential writes. The paper evaluates TileDB against HDF5, SciDB, and Vertica. Experiments show TileDB is several orders of magnitude faster than competitors for random updates to dense arrays and loading/updating sparse arrays. TileDB also exhibits excellent scalability with dataset size and parallelism. However, future work could evaluate TileDB on higher dimensional real-world data and implement additional compression schemes.





![Overview of TileDB
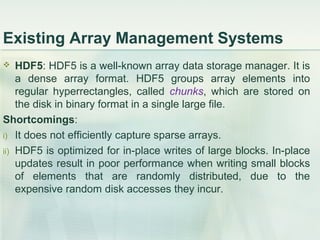
 DataModel: TileDB provides an array-oriented data model that is similar to that of SciDB. An
array consists of dimensions and attributes. Each dimension has a domain, and all dimension
domains collectively orient the logical space of the array. A cell may either be empty (null) or
contain a tuple of attribute values. Each attribute is either a primitive type (int, float, or char), or
a fixed or variable-sized vector of a primitive type. Arrays in TileDB can be dense or sparse. All
TileDB operations can be performed on either type of array, but the choice of dense vs. sparse
can significantly impact application performance
 Figure below shows two example arrays, one dense one sparse, which have two dimensions,
rows and columns. Both dimensions have domain [1,4]. The arrays have two attributes, a1 of
type int32 and a2 of type variable char. Each cell is identified by its coordinates, i.e., a pair of
rows, columns. In the examples, empty cells are shown in white, and nonempty cells in gray. In
the dense array, every cell has an attribute tuple, e.g., cell (4,4) contains <15; pppp>, whereas
several cells in the sparse array are empty, e.g., cell (4,1).
Figure:
The Logical array view](https://image.slidesharecdn.com/tiledb-181130134802/85/TileDB-7-320.jpg)














TileDB
- 1. The TileDB Array Data Storage Manager Authors: Stavros Papadopoulos, Kushal Datta, Samuel Madden and Timothy Mattson Published in: Journal Proceedings of the VLDB Endowment Vol. 10 Issue 4, November 2016 Reviewer: Olamide Timothy Tawose
- 2. Preamble Many scientific and engineering fields generate enormous amounts of data through measurement, simulation, and experimentation. Examples of data produced in such fields include astronomical images, DNA sequences, geo- locations, social relationships, and so on. All of these data are naturally represented as multi-dimensional arrays, which can be either dense (when every array element has a value) or sparse (when the majority of the array elements are empty, i.e., zero or null). Scientific array data can be very large, containing billions of non-null values that do not readily fit into the memory of a single or even multiple machines. Simply storing arrays as files forces application programmers to handle many issues, including array representation on disk (i.e., sparse vs. dense layouts), compression, parallel access, and performance. Alternatively, these issues can be handled by optimized, special-purpose array data storage management systems, which perform complex analytics on scientific data. Central to such systems are efficient data access primitives to read and write arrays.
- 3. Objectives The authors of this work developed a novel storage manager for multi-dimensional arrays for the scientific data management system called TileDB. In contrast to existing solutions, TileDB is optimized for both dense and sparse arrays. Its key idea is to organize array elements into ordered collections called fragments. TileDB array manager is the first truly optimized storage manager for both forms of multi-dimensional arrays (i.e. dense array and sparse array).
- 4. Existing Array Management Systems  HDF5: HDF5 is a well-known array data storage manager. It is a dense array format. HDF5 groups array elements into regular hyperrectangles, called chunks, which are stored on the disk in binary format in a single large file. Shortcomings: i) It does not efficiently capture sparse arrays. ii) HDF5 is optimized for in-place writes of large blocks. In-place updates result in poor performance when writing small blocks of elements that are randomly distributed, due to the expensive random disk accesses they incur.
- 5. Existing Array Management Systems  Parallel HDF5: It is a parallel version of HDF5 with some additional limitations. Shortcomings: i) it does not allow concurrent writes to compressed data. ii) it does not support variable-length element values. iii) operation atomicity requires some coding effort from the user, and imposes extra ordering semantics  Vertica: Alternatively, relational databases (e.g Vertica) have been used as the storage backend for array management (e.g., in RAM for dense and SRAM for sparse arrays), storing non-empty elements as records and explicitly encoding the element indices as extra table columns. However, this also leads to poor performance in the case of dense arrays when explicitly encoded.
- 6. Existing Array Management Systems  SciDB: It is a popular array database, which however also has significant storage management limitations. Shortcomings: i) It is not truly designed for sparse arrays as it relies on regular dimensional chunking (similar to HDF5). ii) It also requires reading an entire chunk even if a small portion of it is requested, and updating an entire chunk even when a single element changes, leading to poor performance in the case of random writes.
- 7. Overview of TileDB  DataModel: TileDB provides an array-oriented data model that is similar to that of SciDB. An array consists of dimensions and attributes. Each dimension has a domain, and all dimension domains collectively orient the logical space of the array. A cell may either be empty (null) or contain a tuple of attribute values. Each attribute is either a primitive type (int, float, or char), or a fixed or variable-sized vector of a primitive type. Arrays in TileDB can be dense or sparse. All TileDB operations can be performed on either type of array, but the choice of dense vs. sparse can significantly impact application performance  Figure below shows two example arrays, one dense one sparse, which have two dimensions, rows and columns. Both dimensions have domain [1,4]. The arrays have two attributes, a1 of type int32 and a2 of type variable char. Each cell is identified by its coordinates, i.e., a pair of rows, columns. In the examples, empty cells are shown in white, and nonempty cells in gray. In the dense array, every cell has an attribute tuple, e.g., cell (4,4) contains <15; pppp>, whereas several cells in the sparse array are empty, e.g., cell (4,1). Figure: The Logical array view
- 8. Overview of TileDB  Compression: TileDB employs tile-based compression. Additionally, it allows the user to select different compression schemes on a per-attribute basis, as attributes are stored separately. The API supports defining different compression schemes for each attribute, but currently only gzip is implemented. The current version of TileDB does not support more compression schemes, such as RLE, LZ, as well as user-defined schemes
- 9. Overview of TileDB  TileDB storage module or manager organizes array elements into ordered collections called fragments in order to support both dense and sparse multi- dimensional arrays. Fragments can either be dense or sparse. A fragment is a timestamped snapshot of a batch of array updates, i.e., a collection of array modifications carried out via write operations and made visible at a particular time instant. For instance, the initial loading of the data into the array constitutes the first array fragment. If at a later time a set of cells is modified, then these cells constitute the second array fragment, and so on. In that sense, an array is comprised of a collection of array fragments, each of which can be regarded as a separate array, whose collective logical overlap composes the current logical view of the array. Dense fragments are used only with dense arrays, but sparse fragments may be applied to both dense and sparse arrays  The concept of fragments dramatically improves write performance as writes are performed in batches, and each batch (which may consist of many small, random writes) is written to a separate fragment sequentially.  The organization into fragments turns random writes into sequential writes, and,
- 10. Fragment Examples Figure below shows an example of an array with three fragments; the first two are dense and the third is sparse. Observe that the second fragment is dense within a hyper-rectangular subarray, whereas any cell outside this subarray is empty. The figure also illustrates the collective logical view of the array; the cells of the most recent fragments overwrite those of the older ones. Fragments are the key concept that enables TileDB to perform rapid writes.
- 11. Overview of TileDB  TileDB array storage manager implements an efficient read algorithm to easily find the most recent fragment that updated each returned element in situations where multiple fragments may cover the same logical region of an array and some fragments may be sparse. This read algorithm allows it to efficiently access all fragments, skipping data that does not qualify for the result. The algorithm is slightly different for dense and sparse arrays  Also, TileDB array storage manager employs a consolidation algorithm that merges multiple fragments into a single one to tackle read performance degradation when the number of fragments grow.  TileDB enables or supports parallelization via multi-threading and multiprocessing, offering thread-/process-safety and atomicity via lightweight locking. TileDB delivers better performance than existing state-of-the-art systems (all thanks to its efficient storage manager).  Moreover, it guarantees operation atomicity, without imposing any additional ordering constraints (this is in contrast to parallel implementations of HDF5, like PHDF5)
- 12. Experiments Competitors: TileDB was compared against 3 competitors namely; HDF5 (for dense arrays), SciDB (for dense and sparse arrays), and Vertica (for dense and sparse arrays). For all parallel experiments, they used the parallel version of HDF5, namely PHDF5. System configuration: All experiments was performed on an Intel x86_64 platform with a 2.3 GHz 36-core CPU and 128 GB of RAM, running CentOS6. They utilized a 4 TB, 7200rpm Western Digital HDD and a 480 GB Intel SSD both not RAID- ed and equipped with the ext4 file system. Because the HDD is I/O bound even with a single thread, they ran serial experiments on the HDD. Because the SSD is so much faster, they ran our parallel experiments on SSDs. For TileDB, SciDB and HDF5, they experimented both with and without gzip compression, using compression level 6. Note: PHDF5 does not support parallel load or updates on compressed datasets. In addition, Vertica cannot be used without compression; the default compression method is RLE, which is currently not supported by TileDB. Therefore, they used Vertica with gzip (compression level 6)
- 13. Experiments For TileDB, SciDB and HDF5, they experimented both with and without gzip compression, using compression level 6. Note: PHDF5 does not support parallel load or updates on compressed datasets. In addition, Vertica cannot be used without compression; the default compression method is RLE, which is currently not supported by TileDB. Therefore, they have used Vertica with gzip (compression level 6). Also, Vertica by default uses all the available cores in the system. In order to vary the number of threads used in the parallel experiments, they simply shut down a subset of the cores at the OS level. Datasets: For dense arrays, they constructed synthetic 2D arrays of variable sizes, with a single int32 attribute. For the case of sparse arrays, they used datasets retrieved from the AIS database, which was collected by the National Oceanic and Atmospheric Administration by tracking ship vessels in the U.S. and international waters. They extracted attributes X (longitude), Y (latitude), SOG, COG, Heading, ROT, Status, VoyageID, and MMSI.They used X,Y as the dimensions (i.e., they created a 2D array), and the rest characteristics as the attributes. SciDB does not support real dimension values, thus they converted X and Y into int64,
- 14. Dense Arrays: TileDB vs HDF5, SciDB and Vertica a. Load: Figure below shows the time to load a dense array into TileDB, HDF5 and SciDB, as well as their gzip-compressed versions, denoted TileDB+Z, HDF5+Z and SciDB+Z, respectively. In this experiment, only one CPU core is activated and each system runs on a single instance. They generated 2D synthetic arrays with sizes 4 GB, 8 GB, and 16 GB, and dimension domains 50,000 × 20,000, 50,000 × 40,000, and 100,00 × 40,000 respectively. TileDB matches the performance of HDF5 (it takes only 60s to load 4GB), and it is consistently more than an order of magnitude faster than SciDB. A dollar (’$’) symbol indicates that the system did not manage to terminate within the shown time. However, the performance of TileDB+Z, HDF5+Z and SciDB+Z deteriorates as the tile Figure: Load performance of dense array
- 15. Dense Arrays: TileDB vs HDF5, SciDB and Vertica a. Load: Figure below assesses the cost of loading data in parallel, for the 4GB array. In this experiment, many CPU core were activated as the number of tested instances. They excluded HDF5+Z, since PHDF5 does not allow parallel writes with compression. TileDB and HDF5 are unaffected by the level of parallelism, as they are I/O bound. Moreover, each process writes large data chunks at a time monopolizing the internal parallelism of the SSD and, thus, no extra savings are noticed with parallel processes. SciDB seems to scale because it is CPU bound. Moreover, the compressed versions of all systems scale nicely, since they are CPU bound as well due to the CPU cost of gzip compression. The performance of TileDB and HDF5 match, whereas TileDB and TileDB+Z are Figure: Load performance of dense array
- 16. Dense Arrays: TileDB vs HDF5, SciDB and Vertica b. Update: Figure below shows the time to perform random element updates to the 4 GB array, as a function of the number of updated elements. They excluded HDF5+Z as it does not support updates on compressed data. TileDB is up to more than 2 orders of magnitude faster than HDF5, with 100K updates running in less than 1s in TileDB vs. more than 100s in HDF5, and more than 4 orders of magnitude faster than SciDB. This is due to the sequential, fragment-based writes of TileDB, as opposed to the in-place updates in HDF5 and the chunk-based updates in SciDB. The performance gap increases with the number of updated elements. Figure: Random update performance of dense arrays
- 17. Dense Arrays: TileDB vs HDF5, SciDB and Vertica b. Update: Figure below illustrates the update cost on SSDs when varying the number of instances and fixing the number of element updates to 100K. They split the updates equally into separate binary files, one for each instance. TileDB and HDF5 are unaffected by the number of instances and, thus, all the previous observations hold. SciDB performance improves with the number of instances. However, it is still up to more than 3 orders of magnitude slower than TileDB. Figure: Random update performance of dense arrays
- 18. Sparse Arrays: TileDB vs SciDB and Vertica Next focus is on sparse arrays, comparing TileDB with Vertica+Z (gzip-compressed and following SRAM) and SciDB on the AIS dataset. HDF5 is not optimized for sparse arrays, thus they omitted it from these experiments. a. Load: Figure below shows the load performance of the three systems. They created three different datasets with sizes 6 GB, 12 GB, 24 GB by loading from the dataset (originally in CSV format), after de-duplicating the coordinates. TileDB is once again more than an order of magnitude faster than SciDB. Moreover, TileDB+Z is always slightly faster than Vertica+Z. Figure: Load performance of sparse arrays
- 19. Sparse Arrays: TileDB vs SciDB and Vertica a. Load: Figure below plots the time to load the 6 GB dataset in parallel, versus the number of instances. Note that Vertica by default uses all the cores in the system. Thus, when they varied the number of instances, they activated only as many CPU cores as the number of tested instances. TileDB, TileDB+Z and Vertica+Z scale nicely with the number of instances. The performance differences among the systems are similar to what was explained above for the serial case. Figure: Load performance of sparse arrays
- 20. Conclusion: Key Takeaways The evaluation reveals the following main results: (i)TileDB is several orders of magnitude faster than HDF5 in the case of random element updates for dense arrays, and at least as efficient in other settings, offering up to 2x better performance on compressed data; (ii)TileDB outperforms SciDB in all settings for both dense and sparse arrays, generally by several orders of magnitude; (iii)TileDB is 2x-40x faster than Vertica in the dense case. It is also at least as fast as Vertica in the sparse case, featuring up to more than 2x faster parallel reads; (iv)the performance of the read algorithm in TileDB is robust up to a large number of fragments, whereas the consolidation mechanism requires marginally higher time than that needed for the initial loading; (v)TileDB exhibits excellent scalability as the dataset size (i.e. when operating on large datasets) and level of parallelism increase.
- 21. Future Works The datasets described only use synthetic 2D data with integers only. A more valid experiment would be higher dimensionality "real-world" data. Also, TileDB should be run in modes that can be more correlated to its competitors. In addition, all compression schemes are not currently supported by TileDB API. Its current implementation only provides support for gzip while other schemes like Run Length Encoding (RLE) and Lempel-Ziv (LZ) are not supported.
- 22. THANK YOU FOR LISTENING