TU Automotive Osram Presentation Final
ŌĆó
14 likesŌĆó6,069 views

This document discusses infrared sensors for autonomous vehicles. It provides an overview of OSRAM, a leader in LED and laser technologies. It then discusses the sensing challenges for autonomous vehicles, including range, resolution, field of view, and computational challenges. It reviews sensor technologies like LIDAR, infrared cameras, and RADAR, and their applications in autonomous driving. It also explores concepts for low-cost LIDAR solutions using flash LIDAR and scanning LIDAR technologies.




TU Automotive Osram Presentation Final
- 1. www.osram-os.com Infrared sensors for ADAS and beyond ŌĆō LIDAR / Infrared camera Rajeev Thakur| 4th October 2016| Novi Light is OSRAM
- 2. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 2 Content Page 1. OSRAM Overview 03 2. Sensing challenges 06 3. LIDAR 12 4. Infrared Camera 19 5. Sensor Fusion 21 6. Collaboration & Competition in the self driving car business 22
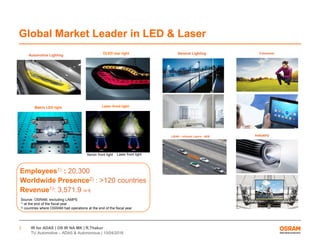
- 3. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 3 Global Market Leader in LED & Laser LIDAR ŌĆō Infrared Lasers - AEB Consumer Industry General Lighting Laser front light Xenon front light Laser front light OLED rear light Matrix LED light Automotive Lighting Source: OSRAM, excluding LAMPS 1) at the end of the fiscal year 2) countries where OSRAM had operations at the end of the fiscal year Employees1) : 20,300 Worldwide Presence2) : >120 countries Revenue1): 3,571.9 m Ōé¼
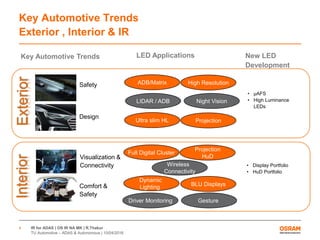
- 4. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 4 Key Automotive Trends Exterior , Interior & IR Safety Design Visualization & Connectivity Comfort & Safety Key Automotive Trends ExteriorInterior ŌĆó ┬ĄAFS ŌĆó High Luminance LEDs Dynamic Lighting Projection HuD Full Digital Cluster LED Applications New LED Development ŌĆó Display Portfolio ŌĆó HuD Portfolio BLU Displays High ResolutionADB/Matrix ProjectionUltra slim HL LIDAR / ADB Gesture Wireless Connectivity Driver Monitoring Night Vision
- 5. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 5 OSRAM Infrared & Laser Automotive Applications Existing Applications / New Applications Rain Light Tunnel Sensors Ambient light sensors for dimming and illumination ŌĆó Dashboard ŌĆó Car radio ŌĆó Displays Immobilizer Steering wheel angle sensor Blue Lasers for Headlamps Driver monitoring Gesture Recognition IRED based Night vision Blind spot detection Lane departure warning Family Entertainment System LIDAR sensing AEB & ADAS Laser HuD
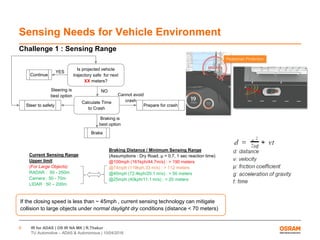
- 6. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 6 Sensing Needs for Vehicle Environment Continue Brake Steer to safety Prepare for crash Steering is best option Cannot avoid crash Braking is best option NO YES Current Sensing Range Upper limit (For Large Objects) RADAR : 50 - 250m Camera : 50 - 70m LIDAR : 50 ŌĆō 200m Braking Distance / Minimum Sensing Range (Assumptions : Dry Road, ┬Ą = 0.7, 1 sec reaction time) @100mph (161kph/44.7m/s) : > 190 meters @74mph (119kph,33 m/s) : > 112 meters @45mph (72.4kph/20.1 m/s) : > 50 meters @25mph (40kph/11.1 m/s) : > 20 meters If the closing speed is less than ~ 45mph , current sensing technology can mitigate collision to large objects under normal daylight dry conditions (distance < 70 meters) Challenge 1 : Sensing Range Is projected vehicle trajectory safe for next XX meters? Calculate Time to Crash
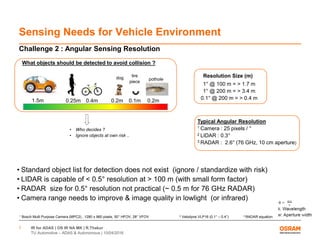
- 7. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 7 Sensing Needs for Vehicle Environment ŌĆó Who decides ? ŌĆó Ignore objects at own risk .. Challenge 2 : Angular Sensing Resolution ŌĆó Standard object list for detection does not exist (ignore / standardize with risk) ŌĆó LIDAR is capable of < 0.5┬░ resolution at > 100 m (with small form factor) ŌĆó RADAR size for 0.5┬░ resolution not practical (~ 0.5 m for 76 GHz RADAR) ŌĆó Camera range needs to improve & image quality in lowlight (or infrared) 1 Bosch Multi Purpose Camera (MPC2) , 1280 x 960 pixels, 50┬░ HFOV, 28┬░ VFOV 2 Velodyne VLP16 (0.1┬░ ŌĆō 0.4┬░) 3 RADAR equation What objects should be detected to avoid collision ? Typical Angular Resolution 1 Camera : 25 pixels / ┬░ 2 LIDAR : 0.3┬░ 3 RADAR : 2.6┬░ (76 GHz, 10 cm aperture) 1.5m 0.25m 0.4m 0.2m 0.1m 0.2m tire piece potholedog Resolution Size (m) 1┬░ @ 100 m = > 1.7 m 1┬░ @ 200 m = > 3.4 m 0.1┬░ @ 200 m = > 0.4 m
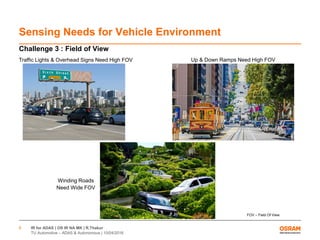
- 8. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 8 Sensing Needs for Vehicle Environment Challenge 3 : Field of View Winding Roads Need Wide FOV Traffic Lights & Overhead Signs Need High FOV Up & Down Ramps Need High FOV FOV ŌĆō Field Of View
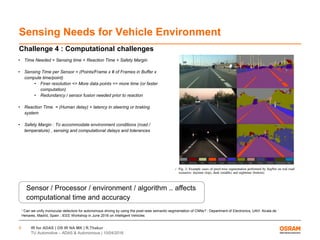
- 9. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 9 Sensing Needs for Vehicle Environment Challenge 4 : Computational challenges ŌĆó Time Needed = Sensing time + Reaction Time + Safety Margin ŌĆó Sensing Time per Sensor = (Points/Frame x # of Frames in Buffer x compute time/point) ŌĆó Finer resolution => More data points => more time (or faster computation) ŌĆó Redundancy / sensor fusion needed prior to reaction ŌĆó Reaction Time = (Human delay) + latency in steering or braking system ŌĆó Safety Margin : To accommodate environment conditions (road / temperature) , sensing and computational delays and tolerances 1 Can we unify monocular detectors for autonomous driving by using the pixel-wise semantic segmentation of CNNs? : Department of Electronics, UAH. Alcala de ┬┤ Henares, Madrid, Spain ; IEEE Workshop in June 2016 on Intelligent Vehicles 1 Sensor / Processor / environment / algorithm .. affects computational time and accuracy
- 10. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 10 Sensing Needs for Vehicle Environment Other Challenges ŌĆó Form factor ŌĆō small and compatible to vehicle styling & materials ŌĆó Increasing noise from surrounding vehicle RADAR/LIDAR .. ŌĆó Dealing with satellite signal / GPS loss in real time ŌĆó Harsh environment ŌĆō Snow/rain/dust/dirt/shock and vibrations ŌĆó Power / EMC / ESD / .. ŌĆó Service ŌĆó Cost ŌĆó .. ŌĆó Tremendous innovation currently in sensing field ŌĆó OSRAM working with multiple startups / Tier1 and OEMŌĆÖs
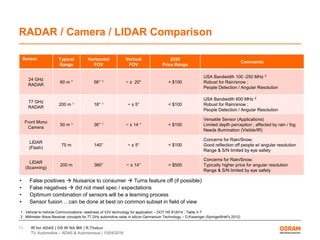
- 11. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 11 RADAR / Camera / LIDAR Comparison Sensor Typical Range Horizontal FOV Vertical FOV 2020 Price Range Comments 24 GHz RADAR 60 m 1 56┬░ 1 ~ ┬▒ 20┬░ < $100 USA Bandwidth 100 -250 MHz 2 Robust for Rain/snow ; People Detection / Angular Resolution 77 GHz RADAR 200 m 1 18┬░ 1 ~ ┬▒ 5┬░ < $100 USA Bandwidth 600 MHz 2 Robust for Rain/snow ; People Detection / Angular Resolution Front Mono Camera 50 m 1 36┬░ 1 ~ ┬▒ 14 ┬░ < $100 Versatile Sensor (Applications) Limited depth perception ; affected by rain / fog Needs illumination (Visible/IR) LIDAR (Flash) 75 m 140┬░ ~ ┬▒ 5┬░ < $100 Concerns for Rain/Snow; Good reflection off people w/ angular resolution Range & S/N limited by eye safety LIDAR (Scanning) 200 m 360┬░ ~ ┬▒ 14┬░ < $500 Concerns for Rain/Snow; Typically higher price for angular resolution Range & S/N limited by eye safety 1 : Vehicle-to-Vehicle Communications: readiness of V2V technology for application ŌĆō DOT HS 812014 ; Table V-7 2 : Millimeter Wave Receiver concepts for 77 GHz automotive radar in silicon Germanium Technology ŌĆō D.Kissenger (SpringerBriefŌĆÖs 2012) ŌĆó False positives ’āĀ Nuisance to consumer ’āĀ Turns feature off (if possible) ŌĆó False negatives ’āĀ did not meet spec / expectations ŌĆó Optimum combination of sensors will be a learning process ŌĆó Sensor fusion ŌĆ”can be done at best on common subset in field of view
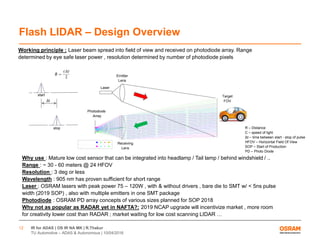
- 12. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 12 Flash LIDAR ŌĆō Design Overview start stop ╬öt Laser Photodiode Array Emitter Lens Receiving Lens Target FOV Working principle : Laser beam spread into field of view and received on photodiode array. Range determined by eye safe laser power , resolution determined by number of photodiode pixels Why use : Mature low cost sensor that can be integrated into headlamp / Tail lamp / behind windshield / .. Range : ~ 30 - 60 meters @ 24 HFOV Resolution : 3 deg or less Wavelength : 905 nm has proven sufficient for short range Laser : OSRAM lasers with peak power 75 ŌĆō 120W , with & without drivers , bare die to SMT w/ < 5ns pulse width (2019 SOP) , also with multiple emitters in one SMT package Photodiode : OSRAM PD array concepts of various sizes planned for SOP 2018 Why not as popular as RADAR yet in NAFTA?: 2019 NCAP upgrade will incentivize market , more room for creativity lower cost than RADAR ; market waiting for low cost scanning LIDAR ŌĆ” R ŌĆō Distance C ŌĆō speed of light ╬öt ŌĆō time between start - stop of pulse HFOV ŌĆō Horizontal Field Of View SOP ŌĆō Start of Production PD ŌĆō Photo Diode
- 13. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 13 LIDAR Head Lamp Integration ŌĆō LeddarTech Concept Leddartech Video link
- 14. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 14 LIDAR Tail Lamp Integration ŌĆō LeddarTech Concept
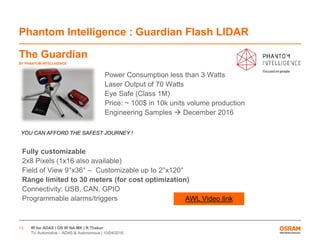
- 15. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 15 Phantom Intelligence : Guardian Flash LIDAR The Guardian BY PHANTOM INTELLIGENCE Fully customizable 2x8 Pixels (1x16 also available) Field of View 9┬░x36┬░ ŌĆō Customizable up to 2┬░x120┬░ Range limited to 30 meters (for cost optimization) Connectivity: USB, CAN, GPIO Programmable alarms/triggers Power Consumption less than 3 Watts Laser Output of 70 Watts Eye Safe (Class 1M) Price: ~ 100$ in 10k units volume production Engineering Samples ’āĀ December 2016 AWL Video link YOU CAN AFFORD THE SAFEST JOURNEY !
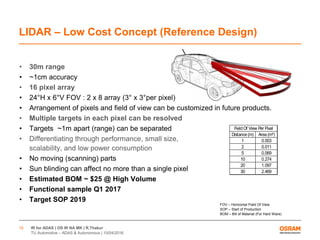
- 16. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 16 LIDAR ŌĆō Low Cost Concept (Reference Design) ŌĆó 30m range ŌĆó ~1cm accuracy ŌĆó 16 pixel array ŌĆó 24┬░H x 6┬░V FOV : 2 x 8 array (3┬░ x 3┬░per pixel) ŌĆó Arrangement of pixels and field of view can be customized in future products. ŌĆó Multiple targets in each pixel can be resolved ŌĆó Targets ~1m apart (range) can be separated ŌĆó Differentiating through performance, small size, scalability, and low power consumption ŌĆó No moving (scanning) parts ŌĆó Sun blinding can affect no more than a single pixel ŌĆó Estimated BOM ~ $25 @ High Volume ŌĆó Functional sample Q1 2017 ŌĆó Target SOP 2019 Distance (m) Area (m┬▓) 1 0.003 2 0.011 5 0.069 10 0.274 20 1.097 30 2.469 Field Of View Per Pixel FOV ŌĆō Horizontal Field Of View SOP ŌĆō Start of Production BOM ŌĆō Bill of Material (For Hard Ware)
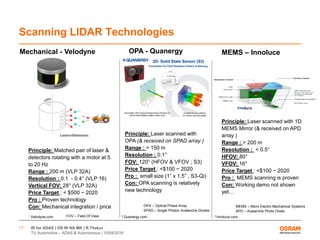
- 17. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 17 Scanning LIDAR Technologies Mechanical - Velodyne Principle: Matched pair of laser & detectors rotating with a motor at 5 to 20 Hz Range : 200 m (VLP 32A) Resolution : 0.1 - 0.4┬░ (VLP 16) Vertical FOV: 28┬░ (VLP 32A) Price Target : < $500 ~ 2020 Pro : Proven technology Con: Mechanical integration / price Principle: Laser scanned with OPA (& received on SPAD array ) Range : > 150 m Resolution : 0.1┬░ FOV: 120┬░ (HFOV & VFOV ; S3) Price Target : <$100 ~ 2020 Pro : small size (1ŌĆØ x 1.5ŌĆØ , S3-Qi) Con: OPA scanning is relatively new technology 1 Velodyne.com 2 Quanergy.com 3 Innoluce.com OPA - Quanergy MEMS ŌĆō Innoluce Principle: Laser scanned with 1D MEMS Mirror (& received on APD array ) Range : > 200 m Resolution : < 0.5┬░ HFOV: 80┬░ VFOV: 16┬░ Price Target : <$100 ~ 2020 Pro : MEMS scanning is proven Con: Working demo not shown yetŌĆ” MEMS ŌĆō Micro Electro Mechanical Systems APD ŌĆō Avalanche Photo Diode OPA ŌĆō Optical Phase Array SPAD ŌĆō Single Photon Avalanche Diodes FOV ŌĆō Field Of View
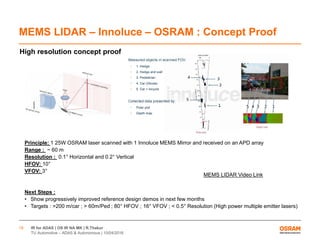
- 18. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 18 MEMS LIDAR ŌĆō Innoluce ŌĆō OSRAM : Concept Proof Principle: 1 25W OSRAM laser scanned with 1 Innoluce MEMS Mirror and received on an APD array Range : ~ 60 m Resolution : 0.1┬░ Horizontal and 0.2┬░ Vertical HFOV: 10┬░ VFOV: 3┬░ Next Steps : ŌĆó Show progressively improved reference design demos in next few months ŌĆó Targets : >200 m/car ; > 60m/Ped ; 80┬░ HFOV ; 16┬░ VFOV ; < 0.5┬░ Resolution (High power multiple emitter lasers) High resolution concept proof MEMS LIDAR Video Link
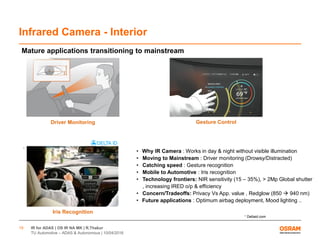
- 19. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 19 Infrared Camera - Interior Mature applications transitioning to mainstream ŌĆó Why IR Camera : Works in day & night without visible illumination ŌĆó Moving to Mainstream : Driver monitoring (Drowsy/Distracted) ŌĆó Catching speed : Gesture recognition ŌĆó Mobile to Automotive : Iris recognition ŌĆó Technology frontiers: NIR sensitivity (15 ŌĆō 35%), > 2Mp Global shutter , increasing IRED o/p & efficiency ŌĆó Concern/Tradeoffs: Privacy Vs App. value , Redglow (850 ’āĀ 940 nm) ŌĆó Future applications : Optimum airbag deployment, Mood lighting .. Driver Monitoring 1 Deltaid.com Gesture Control Iris Recognition 1
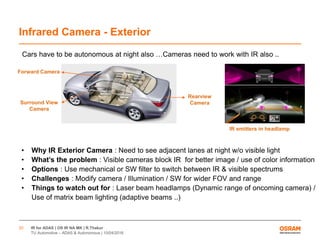
- 20. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 20 Infrared Camera - Exterior Forward Camera Surround View Camera Rearview Camera Cars have to be autonomous at night also ŌĆ”Cameras need to work with IR also .. ŌĆó Why IR Exterior Camera : Need to see adjacent lanes at night w/o visible light ŌĆó WhatŌĆÖs the problem : Visible cameras block IR for better image / use of color information ŌĆó Options : Use mechanical or SW filter to switch between IR & visible spectrums ŌĆó Challenges : Modify camera / Illumination / SW for wider FOV and range ŌĆó Things to watch out for : Laser beam headlamps (Dynamic range of oncoming camera) / Use of matrix beam lighting (adaptive beams ..) IR emitters in headlamp
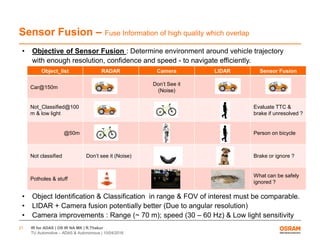
- 21. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 21 Sensor Fusion ŌĆō Fuse Information of high quality which overlap ŌĆó Objective of Sensor Fusion : Determine environment around vehicle trajectory with enough resolution, confidence and speed - to navigate efficiently. Object_list RADAR Camera LIDAR Sensor Fusion Car@150m DonŌĆÖt See it (Noise) Not_Classified@100 m & low light Evaluate TTC & brake if unresolved ? @50m Person on bicycle Not classified DonŌĆÖt see it (Noise) Brake or ignore ? Potholes & stuff What can be safely ignored ? ŌĆó Object Identification & Classification in range & FOV of interest must be comparable. ŌĆó LIDAR + Camera fusion potentially better (Due to angular resolution) ŌĆó Camera improvements : Range (~ 70 m); speed (30 ŌĆō 60 Hz) & Low light sensitivity
- 22. IR for ADAS | OS IR NA MK | R.Thakur TU Automotive ŌĆō ADAS & Autonomous | 10/04/2016 22 Collaboration & Competition - Self Driving Cars ŌĆó Why collaborate : ŌĆó Need NHTSA support ’āĀ Regulations / Testing / Infrastructure / .. ŌĆó Combine R&D resources & strengths ŌĆó Be / be with a technology leader to gain market share ŌĆó Why Compete? ŌĆó Branding / Technology Leadership (Intangible $ Value) ŌĆó ADAS technology has shown real market value ($1500 - $3000/car) ŌĆó Prepare for future market changes (Self driving cars occupy significant share) ŌĆó What more could/should be done ? ŌĆó Use Silicon Valley playbook more ŌĆō open source development ŌĆó Example : Provide raw data from all sensors in a drive ; show me object identification / classification & tracking .. (Buy the best solution..) ŌĆó Make sensor requirements and roadmap open ŌĆó Small startups have very creative solutions & fast development ŌĆó Why be more open ? ŌĆó 1 year after a new gadget is shown ’āĀ 3 more appear next year (Benefit/Cost) ŌĆó Will enable faster development of SDC technology for community & save lives !
- 23. www.osram-os.com Thank you ! Contact : Rajeev.Thakur@osram-os.com