Tuning presentation v1
âĒDownload as PPTX, PDFâĒ
0 likesâĒ261 views

The document discusses PID control and tuning methods. It explains that most manufacturing plants use distributed control systems with PID algorithms for process control. The PID algorithm has been used for over 100 years and is considered the best controller, though it is linear which does not reflect the nonlinear nature of real-life processes. The document then provides an example of using the step change method to tune a temperature controller by adjusting the controller output and observing the process response. Based on the response, tuning parameters of gain, integral time and derivative time are estimated and entered into the controller to improve stability.










![ï― Misc:
ï― Feed Back (typical)
ï― Feed Forward (anticipate)
ï― Inverse Response (challenging)
ï― Types of Algorithm (Honeywell â B)
ï― PID Action (Output â§, PVâĐ, Direct)
ï― Self Regulating (Flow, Temp., Press [yes],
Level [Not])
14](https://image.slidesharecdn.com/tuningpresentationv1-151119195157-lva1-app6891/85/Tuning-presentation-v1-14-320.jpg)

Tuning presentation v1
- 1. Tony Arman Technical Department â GBB Plant 3/15/2013 1
- 2. ï― Importance of PID control ï― Review the basics of PID control ï― Learn how to tune âĶ.. 2
- 3. ï― Today, most manufacturing plants use DCS (Distributed Control System) for process control. ï― DCS manufacturers use PID algorithm for control. 3
- 4. ï― PID algorithm goes back more than a 100 years and is considered to be the âBestâ controller. ï― PID algorithm has one major draw back; ï― It is linear. Life is NOT 4
- 5. ï― The following abbreviations are used in the PID controller. ï― P â Proportional ( = 100/Gain) ï― I â Integral ( = 1/Reset) ï― D â Derivative ( = Rate = Preact) ï― Error = SP - PV 5
- 6. 6
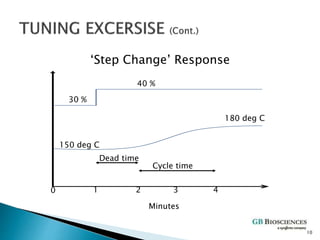
- 7. ï― Scenario : âStep Change Methodâ ï― You are asked to look at a tuning for a Temp. Controller that is not stable. 7
- 8. ï― Step 1: ï― You ask the operator to place the loop in Manual (Output = 30%). ï― Temperature lines out at ~ 150 deg C (range = 0-300 deg C). 8
- 9. ï― Step 2: ï― After a while you ask the operator to raise the output to 40 %. ï― You wait until Temp. lines out at 180 deg C. ï― Based on the controller response, estimate the tuning parameters. 9
- 10. âStep Changeâ Response 30 % 40 % 150 deg C 180 deg C Minutes 0 1 2 3 4 Dead time Cycle time 10
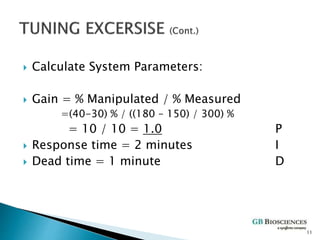
- 11. ï― Calculate System Parameters: ï― Gain = % Manipulated / % Measured =(40-30) % / ((180 â 150) / 300) % = 10 / 10 = 1.0 P ï― Response time = 2 minutes I ï― Dead time = 1 minute D 11
- 12. ï― Enter Controller Parameters (For Honeywell DCS): ï― Set the PID parameters to 50 % of the estimate; ï― Overall Gain, K = 0.5 ï― Integral Time, T1 = 1.0 minute ï― Derivative Time, T2 = 0.5 minute 12
- 13. ï― Tips: ï― Most loops do NOT require derivative action. ï― Be conservative, plan for some upsets. ï― Listen to the operators. ï― Are you tuning the âRightâ loop? 13
- 14. ï― Misc: ï― Feed Back (typical) ï― Feed Forward (anticipate) ï― Inverse Response (challenging) ï― Types of Algorithm (Honeywell â B) ï― PID Action (Output â§, PVâĐ, Direct) ï― Self Regulating (Flow, Temp., Press [yes], Level [Not]) 14
- 15. 15