





![ߤóŌĆŗ-ߤó ßפߤÆß×Üß×æß×╣ßפß×Ü ß×Ėß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×Æ
ߤó-ߤó-ߤĪŌĆŗŌĆŗ ß×ŖߤÆߤéß×Ć Hardware
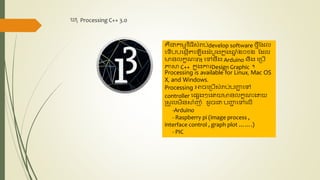
’é┤ ß×ü ULTRASONIC SENSOR
’é┤ Ultrasonic sensors [7] (also known as transceivers when they both send and receive, but more
generally called transducers) work on a principle similar to radar or sonar which evaluate attributes
of a target by interpreting the echoes from radio or sound waves respectively. Ultrasonic sensors
generate high frequency sound waves and evaluate the echo which is received back by the sensor.
Sensors calculate the time interval between sending the signal and receiving the echo to determine
the distance to an object.
’é┤ Systems typically use a transducer which generates sound waves in the ultrasonic range, above
18,000 hertz, by turning electrical energy into sound, then upon receiving the echo turn the sound
waves into electrical energy which can be measured and displayed.](https://image.slidesharecdn.com/random-161210121841/85/ultrasonic-radar-robot-7-320.jpg)






















ultrasonic radar robot
- 1. ß×£ß×Ęß×æߤÆß×Öß×ČßפߤÆß×Éß×Č ß×ōß×ćß×Čß×Åß×Ęß×¢ß×Āß×╗ß×öß×ģߤÆß×ģߤüß×Ćß×ģߤÆß×æߤÆß×Ößפß×ĆßלߤÆß×¢ß×╗ß×ćß×Č National Polytechnic Institute of Cambodia ß×Ćß×Ęß×ģߤÆß×ģß×Ćß×Čß×ÜßפߤÆß×Üß×Čß×£ßפߤÆß×Üß×Čß×£ŌĆŗŌĆŗŌĆŗŌĆŗ ŌĆ£ß×óߤŖß×╗ß×øßפߤÆß×Üß×Čßפß×╝ ß×Äß×Ęß×ģߤÆß×Üߤēß×Č ß×Ŗß×Č ß×Üߤēß×Čß×╝ß×öß×╝ß×ÅŌĆØ Ultrasonic Radar Robot ßפߤÆß×Üß×Üß×╝ß×Ŗß×╣ß×Ćß×ōß×Čߤå ß×ēß×╣ß×ĆŌĆŗŌĆŗßפߤÆß×Üßפßפߤŗ ßפߤÆß×Üß×Ć ß×╗ßלß×æß×Ėߤź ß×ćß×Čß×ÅŌĆŗßפߤŖß×╗ß×üß×ćߤüß×ä ß×öߤēß×Č ß×ōߤŗ ß×¢ß×Ėßפß×Ė ß×ćßלߤĆß×ģß¤Æ ßפߤŖß×╗ß׌ߤÉß×ĆߤÆß×Åß×Ćß×Ü ßלߤÆß×Āß×Čß×£ß×Ęß×æߤÆß×Öß×Čß×øߤÉß×Öß×ģߤÆߤüß×Īß×Ęß×ģß×ÅߤÆß×Åß×╝ß×ōß×Ęß×Ć Faculty of Electronic
- 2. ßלß×Čß×Åß×Ęß×Ćß×Č ß¤ĪŌĆŗß×ćßפß×Ćß×Üß×Ėß×ćߤÆß×Üß׊ßל ߤĪ.ߤĪß×ćߤäß×øß×öß×Čߤåß×Äß×ä ߤĪ.ߤóŌĆŗ ß×Ŗß×Ŗß×ōß×Ćß×Čߤåß×Äß×Åߤŗ ߤóŌĆŗß×Åß×Čߤåß×Üß×╝ß×£ß×Ćß×Čß×Üß×ćßפߤÆß×Üß×Üß×┐ß×äß×öß×äß¤Æ ß×éß×Čߤå&ßפߤÆß×Üß×æß×╣ßפß×Ü ß×Ėß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×ÆߤŻ ß×Ŗß×Čߤåß×ćß×Äß׊ß×Üß×Ćß×Čß×Üß×¢ß×Ęß×ćß×Čß×Æß×ōߤŹ ߤó-ߤĪŌĆŗß×Åß×Čߤåß×Üß×╝ß×£ß×Ćß×Čß×Üß×ćßפߤÆß×Üß×Üß×┐ß×äß×öß×äß¤Æ ß×éß×Čߤå ߤóŌĆŗ-ߤó ßפߤÆß×Üß×æß×╣ßפß×Ü ß×Ėß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×Æ ß¤ó-ߤó-ߤĪŌĆŗŌĆŗ ß×ŖߤÆߤéß×Ć Hardware ߤó-ߤó-ߤóŌĆŗŌĆŗ ß×ŖߤÆߤéß×Ć software ߤŻ ß×Ŗß×Čߤåß×ćß×Äß׊ß×Üß×Ćß×Čß×Üß×ōß×ōß×Ćß×Čß×Üßפß×Ęß×Ćß×Č ß¤Ż-ߤĪŌĆŗBlock Diagram ߤŻ-ߤó Flow chart code ߤŻ-ߤŻŌĆŗß×Ŗß×Čߤåß×ćß×Äß׊ß×Üß×Ćß×Čß×Üß×¢ß×Ęß×ćß×Čß×Æß×ōߤŹ ߤżŌĆŗŌĆŗß×øß×æß×ÆߤÆß×øß×ōß×ōß×Üß×Čߤåß×ćß×Üß×äŌĆŗ(Result) ߤ”ŌĆŗß×ćßפß×ģߤÆß×Ćß×Üß×Ėßפß×ōߤéß×Ęß×Ŗß×Čß×Č ß×ō
- 3. ’é┤ß×Ćߤåß×ģß¤Æ ß׊ß×ōß×ģߤÆßפß×ŖߤÆß×ŗß×Ćß×Ęß×ģߤüß×ćß×Čß×Åß×Ę ß×ōß×Ęß×äß×ćß×Ėß×£ß׌ß×Čß×¢ß×Üß×ößפߤŗß×ÅߤÆß×öß×ćß×Čß×ćß×ōß×ĆߤÅßלß×Čß×ōß×ćß×Ėß×£ß׌ß×Čß×¢ß×Æß×╝ß×Æß×Čß×Ģß×äß×ģߤÆß×ōߤäߤć ß×ĆߤÅß×ōߤåß×ģߤÆߤäß×Öß×öß×ģߤÆß×ģߤüß×Ćß×£ß×Ęß×æߤÆß×Öß×Čß×Ćߤåß×¢ß×╗ß×äß×Åß×Åß׳ß×Čß×ōß×ģߤÆß×Īß׊ß×äß×üߤÆß×ø ߤåß×äß×Ģß×äß×Åß×ŖߤÆß×Ü ß¤ö ß×æߤÆß×Öß×ōß×æß×╣ßלߤÆß×ōß×Ęß×äß×ģߤÆß×ōߤäߤćß×öß×ģߤÆß×ģߤüß×Ćß×£ß×Ęß×æߤÆß×Öß×Čß×ĆߤÅß×ćß×Čß×Ćß×ÅߤÆß×Åß×Č ßפߤåß×üߤÆß×ōߤŗß×Åß×ŖߤÆß×øß×Ģß×Čß×øߤŗß׌ß×Čß×¢ß×äß×Čß×Öß×ÅߤÆßפß×Įß×øß×ŖߤÆß×øߤŗß×ÅߤÆß×öß×ćß×Čß×¢ß×øß×Üß×ŖߤÆß×ŗß×Ģß×äß×Åß×ŖߤÆß×Üߤö ß×Ćß×ōß×╗ß×äß×ģߤÆß×ōߤäߤćß×Åß×ŖߤÆß×Üß×öß×ģߤÆß×ģߤüß×Ćß×£ß×Ęß×æߤÆß×Öß×Čß×öß×ģߤÆß×ģߤüß×Ćß×£ß×Ęß×æߤÆß×Öß×Čß×ćß×Č ß×ģߤÆß×ÅߤÆß×ģß׊ß×ōß×öß×Čß×ōß×öß×ģߤÆß×äß×Ćß׊ß×Åß×ģߤÆß×Īß׊ß×ä ß×Ģß×Čß×øߤŗß׌ß×Čß×¢ß×äß×Čß×Öß×ÅߤÆßפß×Įß×øß×ŖߤÆß×øߤŗß×ÅߤÆß×öß×ćß×Čß×ćß×ō ß×ōß×Ęß×äß×ŖߤÆß×øߤŗß×Ćß×Čß×Üߤüß×ōß×╗ß×£ß×Åß×Čß×Ćß×Čß×Üß×äß×Čß×Üß×ģߤÆß×Ģߤüß×äߤŚ ߤö ß×ģߤÆߤäß×Öß×ģߤÆß×Āß×Åß×╗ß×ģߤÆß×ōߤäߤćß×ģߤÆß×Āß׊ß×Öß×öß×Čß×ōß×ćß×Čß×Ćß×ÅߤÆß×Åß×Č ß×öß×ģß¤Æ ß×ģߤÆß×ģß×Ćß×£ß×Ęß×æߤÆß×Öß×Čß×éß×║ ß×ćß×Čß×Ćß×ÅߤÆß×Åß×Č ßלߤÆß×Įß×Öß×ŖߤÆߤÅßפߤåß×üߤÆß×ōߤŗß×Ćß×ōß×╗ß×äß×Ćß×Čß×Üß×Ģß×Čß×øߤŗß׌ß×Čß×¢ß×Üß×ĀߤÉßפ ß×æß×Čß×ōߤŗßפßלߤÆߤÉß×Ö ß×ōß×Ęß×äߤüß×£ß×Ėß×Åß×ŖߤÆß×øß×ÉߤÆßלß×Ėß×ŖߤÆß×øߤŗߤüß×ōß×Ćß×ģߤÆß×ÅߤÆß×öß׊ß×ÅߤÆß×öß×Čßפߤŗß×ģߤÆß×Āß׊ß×Öß×ćß×Čß×Åߤåß×Üß×╝ß×£ß×Ćß×Čß×Üß×Üß×ößפߤŗߤüß×Åß×Ęß×ÉߤÆß×Ęß×ćß×ō ß×æß×Čߤåß×äߤüßפߤŗß×Ģß×äß×Åß×ŖߤÆß×Ü ß¤ö ß×ģߤÆß×Āß×Åß×╗ß×ģߤÆß×æߤÆß×Öß׊ß×öß×ÅߤÆß×Ćß×╗ßלߤÆß×Üß×ößפߤŗß×ģߤÆß×Öß׊ß×äß×öß×Čß×ōßלߤÆß×╝ß×øßלߤÆß×Åß×Ęß×éߤÆß×ōß×ō ß×ģߤÆß×Æß×£ß׊ß×Ćß×Čß×Üß×ÅߤÆßפߤÆß×Éß×£ß×ÅߤÆß×ćß×Čß×£ß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×Æß×ōß×╣ß×ä Radar System ß×Åß×ŖߤÆß×ø ß×öß×Čß×ōß×ģߤÆß×ŖߤÆß׊ß×Üß×Åß×Įß×Öߤēß×Č ß×äßפߤåß×üߤÆß×ōߤŗß×Ćß×ōß×╗ß×äß×£ß×ĘßפߤÉß×Öß×ģߤÆß×Öß×Æß×Č ß×ģߤÆß×Āß׊ß×Öß×Üß×Öߤäߤćß×Ćß×Čß×øß×ģß×╗ß×äß×ģߤÆß×ÅߤÆß×Ćß×Čß×Öß×ģߤÆß×ōߤäߤćß×ģߤÆß×Öß׊ß×äß×£ß×Čß×ÅߤÆß×Åß×╝ß×£ß×öß×Čß×ōß×Öß×ĆßלߤÆß×Ćß×öß×ēߤÆߤüß×øß×Ćß×ōß×╗ß×äß×Üß×ÉߤÆß×Öß×ōß×Čß×ģߤÆßפß×Üß×Ėß×æߤÆß×Öߤåß×ģߤÆß×ōß׊ß×öß×ģߤÆß×ŖߤÆß׊ßלߤÆß×öß×Ė ß×öß×ģߤÆß×ēߤÆߤüߤĆßפß×ģߤÆß×ÅߤÆß×éߤÆß×ōߤäߤćß×ÉߤÆß×ōß×ō ß×Ćߤŗß×ģß×Üß×Čß×ģß×Ü ß¤Źß¤ö ߤĪŌĆŗß×ćßפß×Ćß×Üß×Ėß×ćߤÆß×Üß׊ßל
- 4. ߤĪ.ߤĪß×ćߤäß×øß×öß×Čߤåß×Äß×ä -ß×Ŗßפߤé ß×äß×Öß×øߤŗß×¢ß×Ėß×Ŗß×Čߤåß×ćß×Äß׊ß×Üß×Ćß×Čß×Üß×æß×╝ß×ćߤģß×Üß×ößפߤŗRadar -ßפߤÆß×Üß×Čß×£ßפߤÆß×Üß×Čß×£ß×¢ß×Ėß×£ ß×Ęß×Æß×Ė Design interface ß×ćß×øß׊Computer -ß×Ćß×Čß×Üß×öß×ēߤÆß×ćß×Č Microcontroller ß×Čßלß×Üß×Öߤćcomputer ß×ćß×Ŗß×Čß×ÖHC11 - ß×¢ßפߤÆß×Üß×äß×Ėß×Ćß×ģߤÆß×Čߤåß×ćß×ōߤćß×Ŗß×╣ß×äŌĆŗß×öß×Ŗß×ōߤéßלŌĆŗß×ŖߤÆߤéß×ĆŌĆŗ Programming, ß×ŖߤÆߤéß×ĆŌĆŗ Circuit Electronic - ß×¢ßפߤÆß×Üß×äß×╣ß×äß×öß×æß×¢ß×Ęß×ćß×Čß×Æß×ōߤŹß×öß×Ŗß×ōߤéßלß×Ćß×ō ß×éß×äß×Ćß×Čß×Üß×öß×ćß×äß×Ćß׊ß×Åproject ߤĪ.ߤóŌĆŗ ß×Ŗß×Ŗß×ōß×Ćß×Čߤåß×Äß×Åߤŗ -ß×ČROBOTßלß×Įß×Öß×Ŗß×Ŗß×øß×óß×Čß×ģß¤Æ scan ß×Üß×Ćß×ćßלß׊ߤŗß×øß×ćߤģßצß×ößפß×Üß×éß×ćߤģß×ģߤÆß×Čߤåß×ćß×¢ß×ČߤćßלߤŖß×╗ß×üß×öß×ōß×Ćß×ō ß×éß×äß×ģߤÆß×ćß×ōß×ø ߤćß×¢ß×ĖŌĆŗߤŻ-ߤżŌĆŗß×Ŗßלߤēß×Čß×ÅŌĆŗ ß×ōß×Ęß×äß×óß×Čß×ģߤÆß×öß×Čߤåß×øß×Čßפߤŗß×æß×Ėß×öß×ōß×Čßלß×Üß×ÖߤćWireless UART SERIAL HC11 ß×Čßלß×Üß×Öߤćcomputer ß×Ćß×ō ß×éß×ä ß×Üß×Öߤćß×ģߤÆß×Čߤåß×äß×Čß×ÖŌĆŗ ߤŻß¤ĀߤĀ-ߤźß¤ĀߤĀŌĆŗß×Ŗßלߤēß×Čß×ÅŌĆŗ -ß×öß×äß×Čß×Č ß×ēßפߤÆß×Üß×Ćß×Čß×öRADAR ß×ćߤģß×ćß×øß׊Screen computer ß×ćß×Ŗß×Čß×Öß׌ߤÆß×ćß×Č ß×öߤŗß×æß×Čߤåß×ōß×Ćߤŗß×æß×Čߤåß×ōß×äß×Čßלß×Üß×ÖߤćŌĆŗHC11 wireless UART serial
- 5. ߤóŌĆŗß×Åß×Čߤåß×Üß×╝ß×£ß×Ćß×Čß×Üß×ćßפߤÆß×Üß×Üß×┐ß×äß×öß×äß¤Æ ß×éß×Čߤå&ßפߤÆß×Üß×æß×╣ßפß×Ü ß×Ėß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×Æ ’é┤ ß×ćß×Ŗß׊ßלß×öß×Ėß×▓ß×Üߤēß×Čß×╝ß×öß×╝ß×ÅŌĆŗ ULTRASONIC RADAR ß×óß×Čß×ģߤÆß×Ŗß×Čߤåß×ćß×Äß׊ß×Üß×Ćß×Čß×Üß×öß×ōß×ćß×Öß׊ß×äßפߤÆß×Üß×Åß×╝ß×£ß×Ćß×Čß×Üß×ģߤÆß×Čߤåß×ćß×ōߤćß×Ŗß×╣ß×äß×¢ß×Čß×Ćߤŗ ßעߤÉß×ōß×Æß×ōß×Ęß×äß×ćßפߤÆß×Üß×Üß×┐ß×äß×öß×äß¤Æ ß×éß×Čߤåßפß×Čߤåß×üß×Čß×ōߤŗߤŚß×Ŗß×╝ß×ģߤÆß×üß×Čß×äß×ćßפߤÆß×Üß×Ćß×Čßל: ’é┤ ߤó-ߤĪŌĆŗß×Åß×Čߤåß×Üß×╝ß×£ß×Ćß×Čß×Üß×ćßפߤÆß×Üß×Üß×┐ß×äß×öß×äß¤Æ ß×éß×Čߤå - Arduino Microcontroller NANO - LIPO Battery - wheel x4 - DC MOTOR (DG01D120)X4 - servo motor(MG90) - ultrasonic sensor - HC11 - L298 driver motor -Wireless USB Serial
- 6. ߤóŌĆŗ-ߤó ßפߤÆß×Üß×æß×╣ßפß×Ü ß×Ėß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×Æ ß¤ó-ߤó-ߤĪŌĆŗŌĆŗ ß×ŖߤÆߤéß×Ć Hardware ’é┤ ß×Ć Arduino Microcontroller NANO Microcontroller ATmega328 Operating Voltage 5V Input Voltage (recommended) 7-12V Input Voltage (limits) 6-20V Digital I/O Pins 14 (of which 6 provide PWM output) Analog Input Pins 8 DC Current per I/O Pin 40 mA DC Current for 3.3V Pin 50 mA Flash Memory 32 KB (ATmega328) of which 0.5 KB used by bootloader SRAM 2 KB (ATmega328) EEPROM 1 KB (ATmega328) Clock Speed 16 MHz External interrupts pins 2 and 3
- 7. ߤóŌĆŗ-ߤó ßפߤÆß×Üß×æß×╣ßפß×Ü ß×Ėß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×Æ ß¤ó-ߤó-ߤĪŌĆŗŌĆŗ ß×ŖߤÆߤéß×Ć Hardware ’é┤ ß×ü ULTRASONIC SENSOR ’é┤ Ultrasonic sensors [7] (also known as transceivers when they both send and receive, but more generally called transducers) work on a principle similar to radar or sonar which evaluate attributes of a target by interpreting the echoes from radio or sound waves respectively. Ultrasonic sensors generate high frequency sound waves and evaluate the echo which is received back by the sensor. Sensors calculate the time interval between sending the signal and receiving the echo to determine the distance to an object. ’é┤ Systems typically use a transducer which generates sound waves in the ultrasonic range, above 18,000 hertz, by turning electrical energy into sound, then upon receiving the echo turn the sound waves into electrical energy which can be measured and displayed.
- 8. ߤóŌĆŗ-ߤó ßפߤÆß×Üß×æß×╣ßפß×Ü ß×Ėß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×Æ ß¤ó-ߤó-ߤĪŌĆŗŌĆŗ ß×ŖߤÆߤéß×Ć Hardware ’é┤ ß×Ü DC MOTOR Optimum Motor Voltage: 4.5V Maximum Motor Voltage: 6.0V No Load Speed: 58rpm No Load Current: 190mA (max. 250mA) Stall Current: 1A More datasheet http://dlnmh9ip6v2uc.cloudfront.net/datasheets/Robotics/DG01D.pdf
- 9. ߤóŌĆŗ-ߤó ßפߤÆß×Üß×æß×╣ßפß×Ü ß×Ėß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×Æ ß¤ó-ߤó-ߤĪŌĆŗŌĆŗ ß×ŖߤÆߤéß×Ć Hardware ß×āŌĆŗ L298D Motor Driver Mode lL298N ß×ČDriver ßפß×Čߤåß×Üß×öߤŗߤÆß×Üß×øߤŗß×ćߤģ ß×Éß×Čßלß×¢ß×øŌĆŗŌĆŗHigh Voltage ß×ōß×Ęß×äŌĆŗHigh Current ß×ćߤģß×▓ßלߤēß×Čß×╝ß×æߤÉß×Ü ß×ōß×Ęß×äß×ČDual full -bridge motor driverß×Ŗß×Ŗß×ø Designed ß×ćߤģß×ōß×╣ß×äStandard TTL logic levels ß×Ŗß×Čߤåß×ćß×Äß׊ß×Ü ß×Ćß×Čß×Üßלß×Čß×ōß×Ŗß×╝ß×ģߤÆß×üß×Čß×äß×ćßפߤÆß×Üß×Ćß×ČßלŌĆŗ: =Operating supply voltage up to 46V =Total DC current up to 4A =Low saturation voltage =Over temperature protection =Logical ŌĆ£0ŌĆØ input voltage up to 1.5vߤö More datasheet http://html.alldatasheet.com/html- pdf/22437/STMICROELECTRONICS/L298/4864/3/L298.ht ml
- 10. ߤóŌĆŗ-ߤó ßפߤÆß×Üß×æß×╣ßפß×Ü ß×Ėß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×Æ ß¤ó-ߤó-ߤĪŌĆŗŌĆŗ ß×ŖߤÆߤéß×Ć Hardware ß×äŌĆŗ HC11 ’é┤ -HC11 ß×Üß×║ß×Čß×ćßפߤĆß×Üߤéß×Ėelectronic ß×Ŗß×Ŗß×øß×óß×Čß×ģߤÆß×ćßפߤÆß×Üß×öß׊ßפß×Čߤåß×Üß×öߤŗß×öß×ēߤÆß×ć ß×╝ß×ōß×ōß×Ęß×äß×æß×æß×Įß×øSignal ß×Äß×Čßלß×Įß×Ö ß×ćß×Ŗß×Čß×Öß×ćßפߤÆß×Üß×öß׊ßפߤÆß×Üß×ößפߤŗß×ćߤäß×øß×Ćß×Čß×Üß×ÄߤŹ UART serial RS232ߤö ’é┤ -ß×£ß×Čß×Ŗß×Čߤåß×ćß×Äß׊ß×Üß×Ćß×Čß×Üß×Čßלß×Įß×Öß×ōß×Ęß×äßפߤÆß×Üß×öß×Ćß×äߤŗŌĆŗŌĆŗ 434MHz ßפߤÆß×Üßפß×öß×ōß×╣ß×äßפß×Ü ß×äߤŗß×Ŗß×Čß×ćßפߤÆß×Üß×öß׊ßפߤÆß×Üß×ößפߤŗß×ćߤģß×Ćß×ō ß×éß×äß×ćß×Üß×äß×ģߤÆßפߤÆß×Üß×Ćß×ōß×ōŌĆŗ -Input voltage 5V -Idle power 3.4mA/3.3v -MAX power 10DBM -Receive sensitivity -110DBM -More Datasheet http://www.topelectronics.com.au/image-eb/HC11/HC11.pdf http://www.seeedstudio.com/wiki/images/a/a8/HC11_User_Manual.pdf
- 11. ߤóŌĆŗ-ߤó ßפߤÆß×Üß×æß×╣ßפß×Ü ß×Ėß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×Æ ß¤ó-ߤó-ߤĪŌĆŗŌĆŗ ß×ŖߤÆߤéß×Ć Hardware ß×ģߤÆŌĆŗ Servo Motor MG90 Modulation: Analog Torque: 4.8V: 30.60 oz-in (2.20 kg- cm) 6.0V: 34.70 oz-in (2.50 kg- cm) Speed: 4.8V: 0.11 sec/60┬░ 6.0V: 0.10 sec/60┬░ Weight: 0.49 oz (14.0 g) Dimensions: Length:0.91 in (23.1 mm) Width:0.48 in (12.2 mm) Height:1.14 in (29.0 mm) Motor Type: MG90 Gear Type: Metal Rotation/Support: Dual Bearings Rotational Range: 180┬░ Pulse Cycle: 20 ms Pulse Width: 400-2400 ┬Ąs Connector Type: (add) Servo motor ß×Üß×║ß×ČßפߤÆß×Üß×öß×ćß׌ßלߤēß×Čß×╝ß×æߤÉß×Ü ß×Ŗß×Ŗß×øß×óß×Čß×ģߤÆß×▓ß×ćß×Öß׊ß×äß×Ćß×Čߤåß×Äß×Åߤŗß×ōß×╝ß×£ß×Ŗß×║ßפߤÆß×Üß×ĆßלߤŖß×╗ß×Čߤåß×Üß×ößפߤŗ ß×óߤÉß×Ćßפß×Üß×äߤéß×Ęß×øß×öß×ōß×Ćß×ō ß×éß×äß×ģߤÆß×ćß×ōß×ø ߤćß×¢ß×Ė ߤĀ-180 ß×Ŗß×║ ß×ćßפߤÆß×Üß×Ć
- 12. ߤóŌĆŗ-ߤó ßפߤÆß×Üß×æß×╣ßפß×Ü ß×Ėß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×Æ ß¤ó-ߤó-ߤĪŌĆŗŌĆŗ ß×ŖߤÆߤéß×Ć Hardware ß×åŌĆŗ Wireless USB serial (2303) ’é┤ ß×Üß×║ß×Čßצß×öß×Ćß×Üß×ÄߤŹßלß×Öߤēß×Čß×äßפß×Čߤåß×Üß×öߤŗconvert USB to UART ß×ćß×Ŗß׊ßלß×öß×Ėß׌ߤÆß×ćß×Č ß×öߤŗß×Čßלß×Įß×ÖŌĆŗHC11ߤö ’é┤ It will definitely boost development speed of projects which uses UART modules like interfacing GSM, GPS, Bluetooth, Wi-Fi ŌĆ” ’é┤ By using it we can easily study these modules by sending data directly from your PC and analyzing the received data in your computer display without programming a microcontroller. Here we will use PL2303, one of the most popular USB to UART
- 13. ߤó-ߤó ßפߤÆß×Üß×æß×╣ßפß×Ü ß×Ėß×¢ß×Čß×ĆߤŗßעߤÉß×ōß×Æ ß¤ó-ߤó-ߤóŌĆŗŌĆŗ ß×ŖߤÆߤéß×Ć software’é┤ ’é┤ ß×Ć ß×ćß×óß×øß×Ėß×öŌĆŗŌĆŗ ’é┤
- 15. ß×Ü 2d coordinate system
- 16. ß×ā Processing C++ 3.0 ß×Üß×║ß×Čß×Ćßלßלß×£ ß×Ęß×Æß×Ėßפß×Čߤåß×Üß×öߤŗdevelop software ß×ÉߤÆßלß×Ėß×Ŗß×Ŗß×ø ß×ćß×æß׊ß×öß×öß×ćß×äß×Ćß׊ß×Åß×ć ß׊ß×äß×Ŗß×Čߤåß×öß×╝ß×äß×Ćß×ō ß×éß×äß×åߤÆߤé ß×ČߤåߤóߤĀߤĪߤó ß×Ŗß×Ŗß×ø ßלß×Čß×ōß×øß×Ćß×üß×ÄߤćFit ß×ćߤģß×ōß×╣ß×ä Arduino ß×ōß×Ęß×ä ß×ćßפߤÆß×Üß×öß׊ ß׌ߤÆß×ćß×Č C++ ß×Ćß×ō ß×éß×äß×Ćß×Čß×ÜDesign Graphic ߤö Processing is available for Linux, Mac OS X, and Windows. Processing ß×óß×Čß×ģߤÆß×ćßפߤÆß×Üß×öß׊ßפß×Čߤåß×Üß×öߤŗß×öß×ēߤÆß×ćß×Č ß×ćߤģ controller ß×ćߤÆßפß×äߤŚß×ćß×Ŗß×Čß×Ößלß×Čß×ōß×øß×Ćß×üß×Äߤćß×äß×Čß×Ö ßפߤÆß×Üßפß×Įß×øßלß×Ęß×ōß×Čß×Čߤåß×ēß×Čߤå ß×Ŗß×╝ß×ģߤÆß×Č ß×öß×ēߤÆß×ćß×Č ß×ćߤģß×ćß×øß׊ -Arduino - Raspberry pi (image process , interface control , graph plot ŌĆ”ŌĆ”.) - PIC
- 17. ß×äŌĆŗ serial communicate ’é┤ serial ß×Č Protocol UART RS-232 PCß׌ߤÆß×ćß×Üß×ģߤÆß×ćßפߤÆß×Üß×ģߤÆß׊ß×ōß×ćßפߤÆß×Üß×öß׊ßפß×Čߤåß×Üß×öߤŗß×Åß׌ߤÆß×ćß×Č ß×öߤŗß×¢ß×Ė PC ß×ćߤģŌĆŗMICRO CONTROLLER ŌĆŗß×Ü ß×║ß×¢ß×Ė Microcontroller ß×ćߤģß×Ćß×Čß×ōߤŗModule ß×ćߤÆßפß×äߤŚ ß×Ŗß×Ŗß×øß×ćß×Üß×ćßפߤÆß×Üß×öß׊Protocol ß×ćß×ōߤćß×Čßלß×ćß×Æß×Öß×öß×Öß×æß×Čߤåß×ōß×Ćߤŗß×æß×Čߤåß×ōß×äŌĆŗߤö ’é┤ ß×Ćß×ō ß×éß×äß×Ćß×Čß×Üß×öß×ēߤÆß×ć ß×╝ß×ōß×¢ß×ÅߤÉßלß×Čß×ōß×¢ß×Ėcomputer ß×åß×øß×äß×Ćß×Čß×Åߤŗ USB ß×ćߤģß×Ćß×Čß×ōߤŗcontrollerß×£ß×Čß×ćß×Æߤéß׊ß×Ćß×Čß×Üß×öß×ēߤÆß×ć ß×╝ß×ōßלß×Üß×äŌĆŗŌĆŗ1Bit. Function ß×Üß×ößפߤŗß×£ß×Čßלß×Čß×ō: if (Serial) readBytes() readBytesUntil() readString() available() availableForWrite() begin() end() find() findUntil() More information about serial : https://www.arduino.cc/en/Reference/Serial
- 18. ß×ģß¤Æ PWM & MOTOR CONROL (Pulse Width Modulation) ’é┤ PWM ß×Üß×║ß×Čsignal digital ß×öß×Čߤå ß×Ŗß×øß×äß×ćߤģß×ČAnalog ß×Ŗß×Ŗß×øß×ćß×Öß׊ß×äß×ćßפߤÆß×Üß×öß׊ßפß×Čߤåß×Üß×öߤŗß×ćß×Æߤéß׊ß×öß×Čߤå ß×Ŗß×Üß×öß×Čߤåß×Üß×Įß×øß×Éß×Čßלß×¢ß×øߤÆß×éß×Åߤŗ ߤÆß×éß×äߤŗß×ćߤģß×ćß×øß׊ß×ćßפߤÆß×Üß×Üß×┐ß×äß×æß×æß×Įß×øß×Ćß×ō ß×éß×äß×öß×Čߤåß×Äß×äß×ćß×Æߤéß׊ ß×öß×öß×Čߤå ß×Ŗß×Üß×öß×Čߤåß×Üß×Įß×øß×ćß×øß×öß×┐ß×ōßלߤēß×Čß×╝ß×æߤÉß×Ü ß×öß×Čߤå ß×Ŗß×Üß×öß×Čߤåß×Üß×Įß×øß×¢ß×ōß×øß×║ŌĆŗ ßלߤŖß×╗ß×ČߤåŌĆŗŌĆ”.. ’é┤ PWM ß×Üß×║ß×Č signal ß×ćß×ÉߤÆß×Üß×Üß×äß×Ćß×Čß×Üß×ćß×Üß×Ŗß×Ŗß×øß×£ß×Čß×ćß×Æߤéß׊ß×Ćß×Čß×Üß×öß×Ęß×æß×ćß×öß׊ß×Ć ß×ć ß׊ß×äß×Üß×ößפߤŗArduino ß×Ćß×ō ß×éß×äßלß×Įß×Öß×üß×Įß×öß×ćß×ÉߤÆß×Üß×Äß×Č ßלß×Įß×ÖŌĆŗß×Ŗß×Ŗß×øß×ćß×Üß×ćߤģß×£ß×Čß×Éß×Č Duty cycle ߤö ’é┤ Syntax analogWrite (pin, value)
- 19. Motor control IN 1 IN2 EN1 ACTIO N X X 0 STOP 0 1 1 1 0 1 1 1 X STOP IN 3 IN4 EN2 ACTIO N X X 0 STOP 0 1 1 1 0 1 1 1 X STOP Syntax digitalWrite(pin,HIGH); digitalWrite(pin,LOW);
- 20. ß×å Solid work ’é┤ SOLID WORK ß×Üß×║ß×Čß×Ćßלßלß×£ ß×Ęß×Æß×Ėßלß×Įß×Öß×ćßפߤÆß×Üß×öß׊ßפß×Čߤåß×Üß×öߤŗß×Üß×╝ß×Ü Design 2d ß×ōß×Ęß×äŌĆŗ3d ß×ćߤģß×ćß×øß׊ß×öß×øß×äߤŗß×ćßלß×Ćß×Čß×ōß×Ęß×Ćߤö ß×ćߤģß×Ćß×ō ß×éß×äŌĆŗproject ß×ćß×Öß׊ß×äß×öß×ōß×ćßפߤÆß×Üß×öß׊solid work ßפß×Čߤåß×Üß×öߤŗdesign ß×Üß×╝ß×öß×Üß×äß×Åß×Įß×Üß×ößפߤŗß×Üߤēß×Čß×╝ß×öß×╝ß×ÅŌĆŗߤö
- 21. ߤŻ ß×Ŗß×Čߤåß×ćß×Äß׊ß×Üß×Ćß×Čß×Üß×ōß×ōß×Ćß×Čß×Üßפß×Ęß×Ćß×Č ß¤Ż-ߤĪŌĆŗBlock Diagram TRANSMITTER BLOCK PC USB SERIAL HC11 DATA INFORMATION PROCESSING INTERFACE DISPLAY HC11 ARDUINO L298D MOTOR1 MOTOR4 MOTOR2 MOTRO3 ULTRASONIC RECIEVER BLOCK
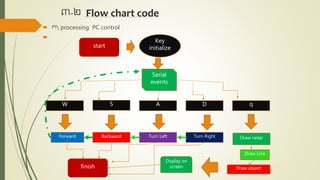
- 22. ߤŻ-ߤó Flow chart code ’é┤ ß×Ć processing PC control ’é┤ Key initialize W S A D q Forward Backward Turn Left Turn Right Serial events Draw radar Draw Line Draw object Display on screen start finish
- 23. ß×ü/ Ultrasonic robot Initialize servo motor , DC motor , ultrasonic Serial events Motor DC active Servo active Ultrasonic scan Calculate distance start finish Forward Backward Turn right Turn left Draw Radar
- 24. ߤŻ-ߤŻŌĆŗß×Ŗß×Čߤåß×ćß×Äß׊ß×Üß×Ćß×Čß×Üß×¢ß×Ęß×ćß×Čß×Æß×ōߤŹ ’é┤ ß×Ć HC11 ’é┤ ß×ćß×Öß׊ß×ätest HC11 ß×ćß×Ŗß×Čß×ÖŌĆŗß×öß×ćß×äß×Ćß׊ß×Åß×ōß×╝ß×£ß×Ćßלßלß×£ ß×Ęß×Æß×Ėßלß×Įß×Öß×Ŗß×Ŗß×øß×óß×Čß×ģߤÆß×▓ß×ćß×Öß׊ß×äß×ćß×øß×ächat ß×Čßלß×Įß×Ößלß×Ęß×Åß×Üß׌ß×Ćß×Üß×Ęß×Üß×ößפߤŗß×ćß×Öß׊ß×ä ß×Ćß×ō ß×éß×äß×Üß×Öߤćß×ģߤÆß×Čߤåß×äß×Čß×ÖŌĆŗߤźß¤ĀߤĀŌĆŗß×Ŗßלߤēß×ČßפߤÆß×Üß×Åߤö ß×Üß×Įß×Üß×öß×ēߤÆß×ćß×Č ß×Ćߤŗß×Éß×Č ß×Ćßלßלß×£ ß×Ęß×Æß×Ėß×ćß×ōߤćßלß×Čß×ōText fieldßפß×Čߤåß×Üß×öߤŗß×£ß×Čß×Öß×óß×Ćßפß×Üß×ģߤÆß×╝ß×ø ß×ōß×Ęß×äText area ßפß×Čߤåß×Üß×öߤŗß×æß×æß×Įß×ø massage ß×Ŗß×Ŗß×øß×ćß×Üß×ćߤÆß×ēß׊ßלß×Ćߤö
- 25. ß×üŌĆŗUltrasonic and Servo ß×Ćß×Čß×Üß×£ß×Čßפߤŗß×Ćß×Čߤåß×Äß×Åߤŗß×ģߤÆß×Čߤåß×äß×Čß×Öß×Üß×ößפߤŗUltrasonic ß×Ćß×Čß×Ütest ß×ćß×øß׊ß×Üß×äߤéß×Ęß×øß×Üß×ößפߤŗServo motor ß×ćß×Ŗß×Čß×Öß׌ߤÆß×ćß×Č ß×öߤŗß×Čßלß×Įß×Ö Ultrasonic
- 26. ß×ü ß×Ćß×Čß×ÜŌĆŗDesign Graphic ß×Ćß×ō ß×éß×äŌĆŗprocessing ellipse(lengthX/2,lengthY/2,radius ,radius); ellipse(lengthX/2,lengthY/2,radius/1. 2 ,radius/1.2); ellipse(lengthX/2,lengthY/2,radius/1. 5 ,radius/1.5); ellipse(lengthX/2,lengthY/2,radius /2,radius/2);
- 27. for (int dergree=0 ; dergree<=360; dergree=dergree+30){ y2= ((radius/2+30)* sin(radians(dergree)))+ lengthY/2; x2= ((radius/2+30)* cos(radians(dergree)))+lengthX/2; line (lengthX/2,lengthY/2,x2,y2); }
- 28. ß×ü ß×Ćß×Čß×Üß×öß×ēߤÆß×ćß×Č ß×ćß×øß׊Motor ß×Ćß×ō ß×éß×äß×ćß×¢ß×øß×¢ß×Ęß×ćß×Čß×Æß×ōߤŹ ß×ćß×Öß׊ß×äß×ćß×āß׊ß×ēß×Éß×Čßלß×Čß×ōß׌ߤÆß×ćß×¢ ß×Üß×óß×Čß×Ćߤŗß×Üß×óß×Įß×øß×ćß×Ŗß×Čß×Öß×Čß×Üß×Ŗß×Å ßלß×Čß×ōß×öß×ēߤÆß×ćß×Č ß×ćß×øß׊ß×Ćß×Čß×Üß×Ćß×Čß×Åߤŗ string ß×ćß×Öß׊ß×äß×öß×ōß×ćß×Ŗß×ČߤćßפߤÆß×Üß×Čß×Ö ß×öß×ēߤÆß×ćß×Č ß×ćß×Ŗß×Čß×Öß×öß×Å ß×╝ß×Üß×£ ß×Ęß×Æß×Ėßפß×Ü ß×ćßפß×Üprogram ß×ćß×Ŗß׊ßלß×öß×Ė ß×Ćß×Čß×Åߤŗstring
- 29. ߤżŌĆŗŌĆŗß×øß×æß×ÆߤÆß×øß×ōß×ōß×Üß×Čߤåß×ćß×Üß×äŌĆŗ(Result) 4.1 ß×øß×æß×ÆߤÆß×øß×Ŗß×ōß×Ćß×Čß×Üß×ćß×Æߤéß׊ß×¢ß×Ėß×ćß×Čß×Æß×ōߤŹß×ćß×øß׊Processing -Red area = object detect -Green area = out of range
- 30. ߤ”ŌĆŗß×ćßפß×ģߤÆß×Ćß×Üß×Ėßפß×ōߤéß×Ęß×Ŗß×Čß×Č ß×ō ’é┤ ß×åß×øß×äß×Čßלß×Ćß×Čß×ÜŌĆŗßפߤÆß×Üß×Čß×£ßפߤÆß×Üß×Čß×£ŌĆŗß×Ćß×ō ß×éß×äProject ULTRASONIC ROBOT ß×ćß×Öß׊ß×äß×öß×ōß×ćß×āß׊ß×ēß×Éß×Čß×Üß×Čߤåß×ćß×Üß×äßלß×Įß×Öß×ćß×ōߤć ß×ōß×╣ß×äßלß×Čß×ōŌĆŗß×Čß×Üߤćßפß×Čߤåß×üß×Čß×ōߤŗß×Ćß×ō ß×éß×ä ß×Ėß×£ß׌ߤÆß×ćß×¢ß×Üßפߤŗß×ćߤģßפßעߤéß×ōß×ÉߤÆߤāß×ōß×ćß×¢ß×øß×óß×ōß×Üß×ÅŌĆŗߤöŌĆŗß×Üß×Čߤåß×ćß×Üß×äß×ćß×ōߤćß×öß×ō ß×Įß×Öß×▓ ßפߤÆß×Üß×Ć ß×╗ßלß×üß¤Æ ß×éß×Čߤåß×öß×æß×¢ßפߤÆß×Üß×äß×Ėß×Ćß×ģߤÆß×Čߤåß×ćß×ōߤćß×Ŗß×╣ß×äß×ŖߤÆߤéß×Ć Interface design processing , Aduino Microcontroller , circuit electronic, Mathematic ß×ćߤüß׊ß×Ößפß×Ęßפß×Čß×ōߤŖß×╗ßפß×Ęßפßפß×æß×╝ß×ćߤģß×Ćß×ō ß×éß×äß×Ćß×Čß×Üß×Ŗßפߤé ß×äß×Öß×øߤŗß×ĆߤÅß×óß×Čß×ģߤÆߤÆß×Üß×øߤŗß×Čß×æߤŖß×╗ß×ō ßלß×╝ß×Öß×Ćß×ō ß×éß×äß×Ćß×Čß×Üß×óß׌ß×Ęß×£ß×īߤÆß׏ß×ōߤŹß×£ ß×ĘßפߤÉß×Öß×öß×ćß×ģߤÆß×ģß×Ćß×£ ß×Ęß×æß×ÖElectronic ߤÆß×äß×Ŗß×Ŗß×Üߤö ’é┤ ß×Čßלß×Ćß×Čß×Üß×Üߤåß×¢ß×╣ß×äß×æߤŖß×╗ß×Ćultrasonic Radar robot ß×ōß×╣ß×äß×óß×Čß×ģߤÆß×ģߤÆß×╝ß×øß×Üß×Įßלß×öß×Čߤåß×ćß×Ü ß׊ß×Ćß×ō ß×éß×äß×£ ß×ĘßפߤÉß×Öß×ćߤäß×Æß×Č ,Automobile ß×Ćß×ō ß×éß×äßפߤÆß×Üß×öß×ćß×æßפß×Ćßלß×¢ ß×éß×Č ß×Ćß×Čß×Åߤŗß×öß×ōߤéß×Öß×Ćß×Čß×Üß×ōß×Čߤåß×ģߤÆß×╝ß×øß×¢ß×Ėß×öß×Üß×ćß×æßפ ß×¢ß×ćß×ōß×øß׊ß×ōß×ćßפß×Ŗß×Čß×Ćß×Ęß×ģߤÆß×ģß×Čß×Åß×Ęߤö ’é┤ ß×Čß×ģߤÆߤŖß×╗ß×äß×ćßפߤÆß×Üß×Ćß×Čß×Öß×üß¤Æ ß×éß×Čߤåßפß×╝ ßלß×ćß×øß׊ß×Ćß×æß×╣ß×Ćß×ģߤÆß×Ęß×Åß×Üß×Ŗß×øߤŗ ß×óߤéß×ĆßפߤÆß×Üß×Čß×£ßפߤÆß×Üß×Čß×£ß×æß×Čߤåß×Čߤåß×äß×Īß×Čß×Öß×▓ß×öß×ōß×Üß×Ćß×Čß×Üß×üß×Ęß×Åß×üß×Čߤåß×Ü ß×Ęߤćß×Üß×Ęß×Åß×ćߤģ ß×Üß×Čߤåß×ōß×Ęß×Åß×ÉߤÆßלß×ĖߤŚß×ćß×Ŗß׊ßלß×öß×Ė ß×Įß×Öß×▓ßפߤÆß×Üß×öß×ćß×æßפß×Ćßלß×¢ ß×éß×Čßלß×Čß×ōß׌ߤÆß×ćß×¢ß×Ü ß׊ß×Ćß×ģߤÆß×Čߤåß×ćß×Ü ß׊ß×ōß×Ćß×ō ß×éß×äß×£ ß×ĘßפߤÉß×Öß×öß×ćß×ģߤÆß×ģß×Ćß×ćß×æßפ ß×Ŗß×╝ß×ģߤÆß×óß×Ü ß×Ęß×Ö ßפߤÆß×Üß×öß×ćß×æßפß×ōß×ōß×ćß×øß׊ßפß×Ćß×øß×ćß×øß×Čß×ĆŌĆŗߤö
- 31. THANK YOU
Editor's Notes
- #21: HH