Varsha patil AISSMS IOIT Pune mca te pu book
•
2 likes•750 views

The document describes the design steps for a microcontroller-based system and case studies of microcontroller applications. It discusses 10 steps for microcontroller design: 1) justification, 2) operations definition, 3) instruction set definition, 4) architecture definition, 5) ALU design/implementation, 6) register file, 7) instruction register, 8) datapath for processing and control, 9) program counter/jumps/transfers, and 10) control unit. It also covers microcontroller performance factors and provides examples of data acquisition and robotic systems controlled by microcontrollers.
Convert to study guideBETA
Transform any presentation into a summarized study guide, highlighting the most important points and key insights.
Varsha patil AISSMS IOIT Pune mca te pu book
- 1. CHAPTER 6 SYSTEM DESIGN Microcontroller and applications ILLUSTRATED BY Varsha Patil
- 2. THE MICROCONTROLLER BASED DESIGN STEPS ï‚— 6.4.1 Methodology Steps ï‚— STEP I Justification ï‚— STEP II Operations Definition ï‚— STEP III Instruction Set Definition ï‚— STEP IV Architecture Definition ï‚— STEP V Arithmetic Logic Unit (Design and Implementation) ï‚— STEP VI The Register File ï‚— STEP VII The Instruction Register ï‚— STEP VIII Data Path for data processing and Control Signal Table ï‚— STEP IX The PC, Jump and data transfer instructions ï‚— STEP X The Control Unit
- 4. ï‚—Increased productivity yields shorter development cycles with more product features and reduced time to market, ï‚—Reduced Non-Recurring Engineering (NRE) costs, ï‚—Design reuse is enabled, ï‚—Increased flexibility to design changes,
- 5. MICROCONTROLLER PERFORMANCE FACTORS ï‚—(a) Speed, size, power cost design time and manufacture cost. ï‚— (b) Architecture : (i) Von Neumann, (ii) Harvard ï‚— (c) Chip Area. ï‚— (d) Simulation and hardware implementation.
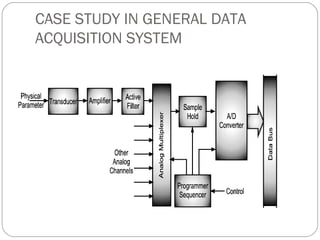
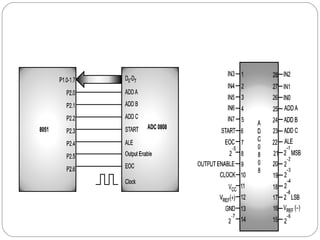
- 6. CASE STUDY IN GENERAL DATA ACQUISITION SYSTEM
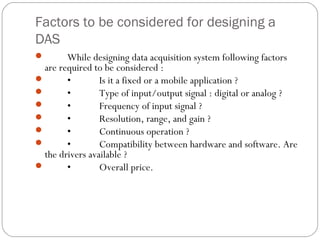
- 8. Factors to be considered for designing a DAS  While designing data acquisition system following factors are required to be considered :  • Is it a fixed or a mobile application ?  • Type of input/output signal : digital or analog ?  • Frequency of input signal ?  • Resolution, range, and gain ?  • Continuous operation ?  • Compatibility between hardware and software. Are the drivers available ?  • Overall price.
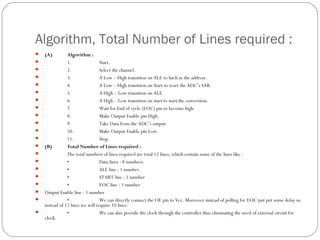
- 10. Algorithm, Total Number of Lines required :  (A) Algorithm :  1. Start.  2. Select the channel.  3. A Low – High transition on ALE to latch in the address.  4. A Low – High transition on Start to reset the ADC’s SAR.  5. A High – Low transition on ALE.  6. A High – Low transition on start to start the conversion.  7. Wait for End of cycle (EOC) pin to become high.  8. Make Output Enable pin High.  9. Take Data from the ADC’s output.  10. Make Output Enable pin Low.  11. Stop.  (B) Total Number of Lines required :  The total numbers of lines required are total 12 lines, which contain some of the lines like :  • Data lines : 8 numbers.  • ALE line : 1 number.  • START line : 1 number  • EOC line : 1 number  Output Enable line : 1 number  • We can directly connect the OE pin to Vcc. Moreover instead of polling for EOC just put some delay so instead of 12 lines we will require 10 lines.  • We can also provide the clock through the controller thus eliminating the need of external circuit for clock.
- 12. 9 CASE STUDY 2 : ROBOT DEVELOPMENT ï‚—Types of Robots ï‚—Technologies That Go to Make up a Robot ï‚— 3 Classes of Robots ï‚—6 Advantages of Robots ï‚—7 Disadvantages of Robots
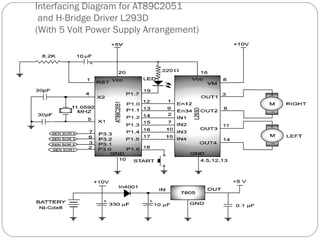
- 13. Interfacing Diagram for AT89C2051 and H-Bridge Driver L293D (With 5 Volt Power Supply Arrangement)
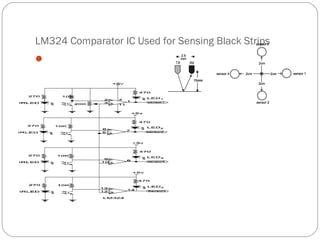
- 14. LM324 Comparator IC Used for Sensing Black Strips ï‚—
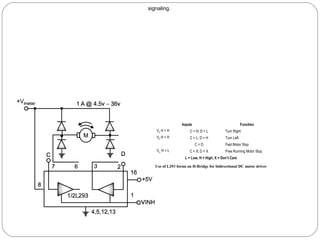
- 15. signaling. Inputs Function Vin H = H C = H; D = L Turn Right Vin H = H C = L; D = H Turn Left C=D Fast Motor Stop Vin H = L C = X; D = X Free Running Motor Stop L = Low, H = High, X = Don’t Care Use of L293 forms an H-Bridge for bidirectional DC motor driver
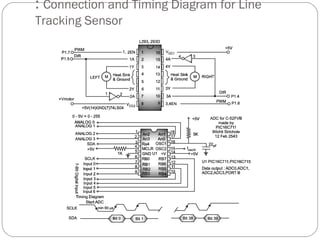
- 16. : Connection and Timing Diagram for Line Tracking Sensor
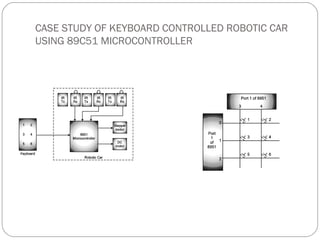
- 17. CASE STUDY OF KEYBOARD CONTROLLED ROBOTIC CAR USING 89C51 MICROCONTROLLER
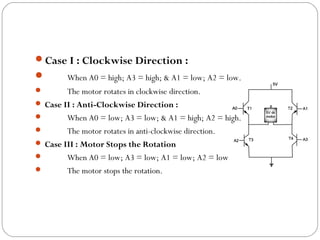
- 18. ï‚—Case I : Clockwise Direction : ï‚— When A0 = high; A3 = high; & A1 = low; A2 = low. ï‚— The motor rotates in clockwise direction. ï‚— Case II : Anti-Clockwise Direction : ï‚— When A0 = low; A3 = low; & A1 = high; A2 = high. ï‚— The motor rotates in anti-clockwise direction. ï‚— Case III : Motor Stops the Rotation ï‚— When A0 = low; A3 = low; A1 = low; A2 = low ï‚— The motor stops the rotation.
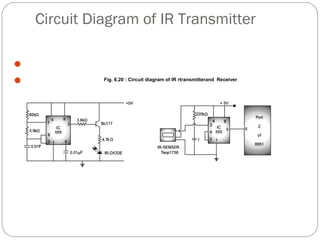
- 20. Circuit Diagram of IR Transmitter ï‚—Â ï‚—Â Fig. 6.20 : Circuit diagram of IR rtransmitterand Receiver
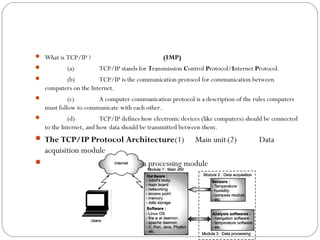
- 21. ï‚— What is TCP/IP ? (IMP) ï‚— (a) TCP/IP stands for Transmission Control Protocol/Internet Protocol. ï‚— (b) TCP/IP is the communication protocol for communication between computers on the Internet. ï‚— (c) A computer communication protocol is a description of the rules computers must follow to communicate with each other. ï‚— (d) TCP/IP defines how electronic devices (like computers) should be connected to the Internet, and how data should be transmitted between them. ï‚— The TCP/IP Protocol Architecture(1) Main unit (2) Data acquisition module ï‚— (3) Data processing module
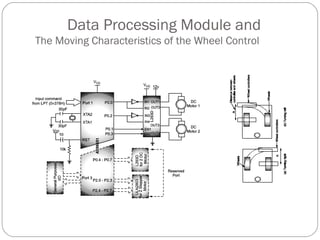
- 22. Data Processing Module and The Moving Characteristics of the Wheel Control
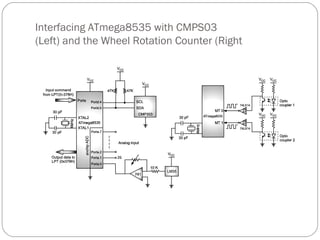
- 23. Interfacing ATmega8535 with CMPS03 (Left) and the Wheel Rotation Counter (Right