VBPR 1st seminar
0 likes490 views

The document provides an overview of a project on vision-based place recognition for autonomous robots. It outlines the objective to localize a robot within an environment using visual cues. The methodology will improve on previous work by combining successful aspects and avoiding limitations. It will use adaptive multi-scale classification to differentiate environments based on discriminative features. Challenges include variations in object appearance and limited robot resources. Testing will use datasets from Bielefeld University and ImageCLEF, as well as a custom data acquisition tool.




VBPR 1st seminar
- 1. Vision-Based Place Recognition for Autonomous Robots First Seminar - Project Overview Team Members: Ahmed Abd-El Fattah Mohammed Ahmed Saher Maher Mourad Aly Mourad Yasser Hassan Ahmed 1 Saturday, December 11, 2010 1
- 2. Prof.Dr Mohamed Roushdy Dr. Mohamed Abdel Megeed Dr. Safaa Amin T.A. Mohamed Fathy Supervisors 2 Saturday, December 11, 2010 2
- 3. Agenda Objective What Methodology How Theoretical Background Improve previous work Motivation Adaptive Multi-Scale Classi?cation Problem De?nition Challenges System Architecture Testing Platform Conventional Pattern Recognition System Architecture Development Tools Related Work Time Plan When ImageCLEF Our Progress Top Related Systems Next Objective References 3 Saturday, December 11, 2010 3
- 4. Objective Where am I ? 4 Saturday, December 11, 2010 4
- 5. Theoretical Background Where are we in the ?eld of computer science ? Pattern Image Recognition Processing Computer Computer Vision Science Arti?cial Intelligence 5 Saturday, December 11, 2010 5
- 6. Motivation Interested in robot vision. Has many applications, help in rescue missions. Co-operation between our university and Bielefeld University. 6 Saturday, December 11, 2010 6
- 7. Problem De?nition Meeting Room Vision-Based Place Recognition for Autonomous Robot What does it mean ? 7 Saturday, December 11, 2010 7
- 8. Problem De?nition SLAM Simultaneous Localization And Mapping. Our problem is to focus on localization issues in most SLAM systems. 8 Saturday, December 11, 2010 8
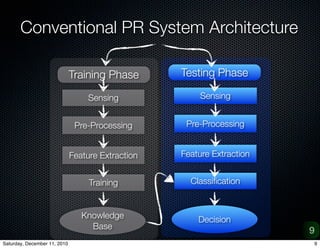
- 9. Conventional PR System Architecture Training Phase Testing Phase Sensing Sensing Pre-Processing Pre-Processing Feature Extraction Feature Extraction Training Classi?cation Knowledge Decision Base 9 Saturday, December 11, 2010 9
- 10. Related Work ImageCLEF ImageCLEF 2010 22-23th September 2010 A yearly contest which focuses on information retrieval using image processing. It branches to many applications including robot vision. 10 Saturday, December 11, 2010 10
- 11. Related Work 1st Position CVG Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys ¨C ¡°Visual localization using global visual features and vanishing points¡± - ETH Zurich, Switzerland Pros Cons Focused on feature extraction Used very primitive classi?cation phase developed new feature methods. extraction algorithms. 11 Saturday, December 11, 2010 11
- 12. Related Work 4th Position Centro Gustavo Stefanini W.Lucetti, E. Luchetti ¨C ¡°Combination of Classi?ers for Indoor Room Recognition¡± - Gustavo Stefanini Research Center - Padua, 23 September 2010 Pros Cons Focused on classi?cation phase Used very primitive feature developed many new extraction methods. combination of classi?ers. 12 Saturday, December 11, 2010 12
- 13. Agenda Methodology Objective What How Theoretical Background Improve previous work Motivation Adaptive Multi-Scale Classi?cation Problem De?nition Challenges System Architecture Testing Platform Conventional Pattern Recognition System Architecture Development Tools Time Plan Related Work When ImageCLEF Our Progress Top Related Systems Next Objective References 13 Saturday, December 11, 2010 13
- 14. Methodology 1. Improve previous work Combine the pros of each group. Try to avoid their mistakes and cons. 14 Saturday, December 11, 2010 14
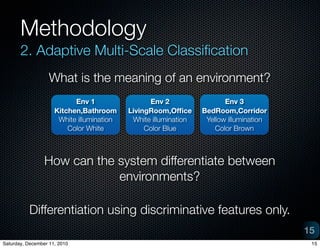
- 15. Methodology 2. Adaptive Multi-Scale Classi?cation What is the meaning of an environment? Env 1 Env 2 Env 3 Kitchen,Bathroom LivingRoom,Of?ce BedRoom,Corridor White illumination White illumination Yellow illumination Color White Color Blue Color Brown How can the system differentiate between environments? Differentiation using discriminative features only. 15 Saturday, December 11, 2010 15
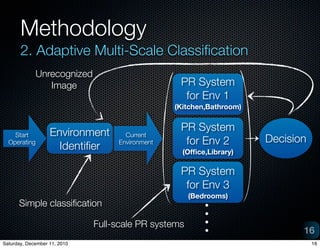
- 16. Methodology 2. Adaptive Multi-Scale Classi?cation Unrecognized Image PR System for Env 1 (Kitchen,Bathroom) Environment PR System Start Current Operating Environment for Env 2 Decision Identi?er (Of?ce,Library) PR System for Env 3 (Bedrooms) Simple classi?cation Full-scale PR systems 16 Saturday, December 11, 2010 16
- 17. Challenges Objects¡¯ appearance varies due to Cluttered background. Difference in illumination. Imaging conditions. Recognition algorithms perform differently with different environments. It¡¯s dif?cult to ?nd a solution that is both resource ef?cient and perform with high accuracy, due to the very limited resources of a mobile robot. 17 Saturday, December 11, 2010 17
- 18. Testing Platforms 1) Bielefeld University¡¯s workbench 2) ImageCLEF¡¯s testing dataset. 3) Build our own data acquisition tool. 18 Saturday, December 11, 2010 18
- 19. Development Tools C++ Matlab 19 Saturday, December 11, 2010 19
- 20. Agenda Objective What Methodology How Theoretical Background Improve previous work Motivation Adaptive Multi-Scale Classi?cation Problem De?nition Challenges System Architecture Testing Platform Conventional Pattern Recognition System Architecture Development Tools Related Work Time Plan When ImageCLEF Our Progress Top Related Systems Next Objective References 20 Saturday, December 11, 2010 20
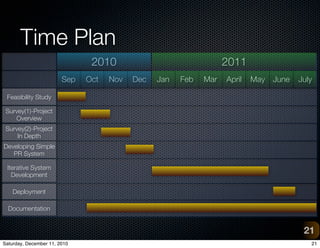
- 21. Time Plan 2010 2011 Sep Oct Nov Dec Jan Feb Mar April May June July Feasibility Study Survey(1)-Project Overview Survey(2)-Project In Depth Developing Simple PR System Iterative System Development Deployment Documentation 21 Saturday, December 11, 2010 21
- 22. Our Progress Survey 1 Survey 2 (Project Overview) (Project in Depth) -Problem de?nition. -Description of each -Commonly used algorithm mentioned algorithms in pattern in survey 1 recognition. 22 Saturday, December 11, 2010 22
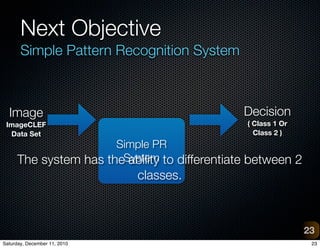
- 23. Next Objective Simple Pattern Recognition System Image Decision ImageCLEF ( Class 1 Or Data Set Class 2 ) Simple PR The system has theSystem to differentiate between 2 ability classes. 23 Saturday, December 11, 2010 23
- 24. References ¡°The Robot Vision Track at ImageCLEF 2010¡±Andrzej Pronobis, Marco Fornoni, Henrik I. Christensen, and Barbara Caputo. ¡°Evaluation of Bayes, ICA, PCA and SVM Methods for Classi?cation¡±, V.C.Chen. Radar Division, US Naval Research Laboratory. Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys ¨C ¡°Visual localization using global visual features and vanishing points¡± - ETH Zurich, Switzerland W.Lucetti, E. Luchetti ¨C ¡°Combination of Classi?ers for Indoor Room Recognition¡± - Gustavo Stefanini Research Center - Padua, 23 September 2010 24 Saturday, December 11, 2010 24
- 25. Contacts Blog: autovpr.wordpress.com Ahmed Saher Maher a7med.saher@gmail.com Ahmed Abd El-Fattah ahmed.abdelfattah1@live.com Mourad Aly Mourad mouraad@windowslive.com Yasser Hassan Ahmed yasserhtd@hotmail.com Thanks! 25 Saturday, December 11, 2010 25