Villar presentation.pdf
0 likes50 views

Eugenio Villar's presentation at the University of Cantabria discusses model-driven design of drone-based services, highlighting the integration of cyber-physical systems (CPS) and simulation methods for effective performance analysis. The presentation emphasizes the importance of multi-level simulation and design-space exploration in creating efficient drone services and acknowledges the contributions of various researchers in this field. Conclusively, it argues for the necessity of advanced design methods like model in the loop and system design to enhance CPS applications.

![June 8, 2022
Ō¢¬ Native Simulation: Flaxibility + accuracy
ŌĆ”
Overflow = 0;
s = 1L;
for (i = 0; i < L_subfr; i++) {
Carry = 0;
s = L_macNs(s, xn[i], y1[i]);
if (Overflow != 0) {
break; }}
if (Overflow == 0) {
exp_xy = norm_l(s);
if (exp_xy<=0)
xy = round(L_shr (s, -exp_xy));
else
xy = round(L_shl (s, exp_xy)); }
mutex_lock(mutex_name);
ŌĆ”
Global variable
int Sim_Time = 0;
Sim_Time += TB();
Sim_Time += TB();
Sim_Time += TB();
Sim_Time += TB();
Sim_Time += TB();
Sim_Time += TB();
wait included
TB() is a function of
# of binary instructions
type of instructions
# of cache misses
frequency
ŌĆ”
even
data dependencies
Sim_Time += TSYS();
TSYS() is a function of
preemptions
conflicts in the busŌĆ”
Design Verification & Performance Analysis
25](https://image.slidesharecdn.com/villarpresentation-220608140733-9a6230f5/85/Villar-presentation-pdf-25-320.jpg)

Villar presentation.pdf
- 1. June 8, 2022 Eugenio Villar University of Cantabria Modeling, Design and Implementation of drone-based Services
- 2. June 8, 2022 Agenda Ō¢¬ Introduction Ō¢¬ Model-Driven Design of CPSoS Ō¢¬ Drone-based Services Ō¢¬ Design Verification and Performance Analysis Ō¢¬ Experimental Results Ō¢¬ Conclusions Ō¢¬ Demos Ō¢¬ ║▌║▌▀Żs can be found at: Ō¢¬ /EugenioVillar/ 2
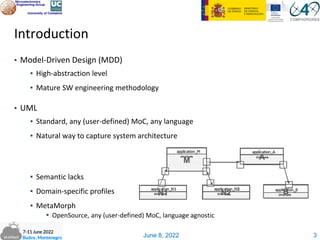
- 3. June 8, 2022 N2 B N1 M A Introduction Ō¢¬ Model-Driven Design (MDD) Ō¢¬ High-abstraction level Ō¢¬ Mature SW engineering methodology Ō¢¬ UML Ō¢¬ Standard, any (user-defined) MoC, any language Ō¢¬ Natural way to capture system architecture 3 Ō¢¬ Semantic lacks Ō¢¬ Domain-specific profiles Ō¢¬ MetaMorph Ō¢¬ OpenSource, any (user-defined) MoC, language agnostic
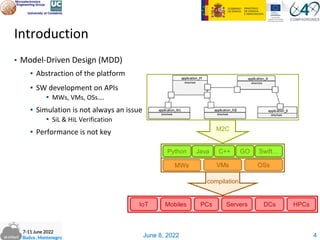
- 4. June 8, 2022 Introduction Ō¢¬ Model-Driven Design (MDD) Ō¢¬ Abstraction of the platform Ō¢¬ SW development on APIs Ō¢¬ MWs, VMs, OSsŌĆ”. Ō¢¬ Simulation is not always an issue Ō¢¬ SiL & HiL Verification Ō¢¬ Performance is not key 4 M2C PCs Servers DCs HPCs Mobiles IoT compilation MWs VMs OSs Python Java C++ GO SwiftŌĆ”
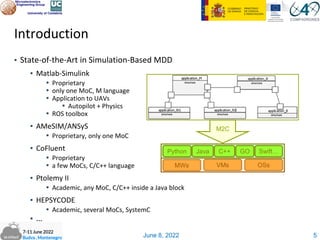
- 5. June 8, 2022 Introduction Ō¢¬ State-of-the-Art in Simulation-Based MDD Ō¢¬ Matlab-Simulink Ō¢¬ Proprietary Ō¢¬ only one MoC, M language Ō¢¬ Application to UAVs Ō¢¬ Autopilot + Physics Ō¢¬ ROS toolbox Ō¢¬ AMeSIM/ANSyS Ō¢¬ Proprietary, only one MoC Ō¢¬ CoFluent Ō¢¬ Proprietary Ō¢¬ a few MoCs, C/C++ language Ō¢¬ Ptolemy II Ō¢¬ Academic, any MoC, C/C++ inside a Java block Ō¢¬ HEPSYCODE Ō¢¬ Academic, several MoCs, SystemC Ō¢¬ ŌĆ” 5 M2C MWs VMs OSs Python Java C++ GO SwiftŌĆ”
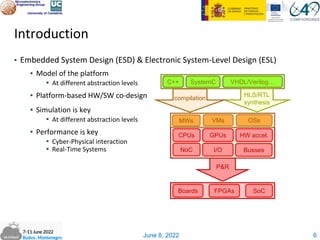
- 6. June 8, 2022 Introduction Ō¢¬ Embedded System Design (ESD) & Electronic System-Level Design (ESL) Ō¢¬ Model of the platform Ō¢¬ At different abstraction levels Ō¢¬ Platform-based HW/SW co-design Ō¢¬ Simulation is key Ō¢¬ At different abstraction levels Ō¢¬ Performance is key Ō¢¬ Cyber-Physical interaction Ō¢¬ Real-Time Systems 6 P&R C++ SystemC VHDL/VerilogŌĆ” SoC FPGAs Boards NoC HW accel. I/O Busses GPUs CPUs MWs VMs OSs HLS/RTL synthesis compilation
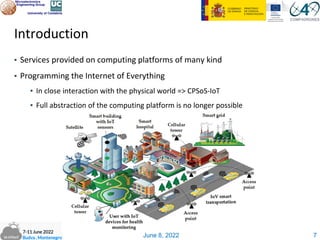
- 7. June 8, 2022 Introduction Ō¢¬ Services provided on computing platforms of many kind Ō¢¬ Programming the Internet of Everything Ō¢¬ In close interaction with the physical world => CPSoS-IoT Ō¢¬ Full abstraction of the computing platform is no longer possible 7
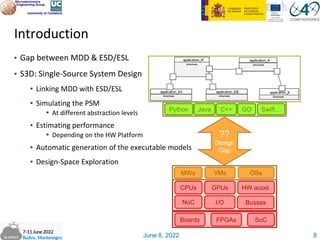
- 8. June 8, 2022 Introduction Ō¢¬ Gap between MDD & ESD/ESL Ō¢¬ S3D: Single-Source System Design Ō¢¬ Linking MDD with ESD/ESL Ō¢¬ Simulating the PSM Ō¢¬ At different abstraction levels Ō¢¬ Estimating performance Ō¢¬ Depending on the HW Platform Ō¢¬ Automatic generation of the executable models Ō¢¬ Design-Space Exploration Python Java C++ GO SwiftŌĆ” SoC FPGAs Boards NoC HW accel. I/O Busses GPUs CPUs MWs VMs OSs ?? Design Gap 8
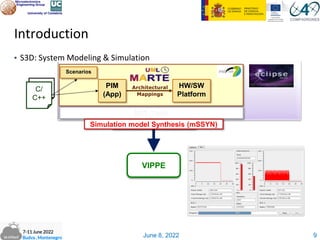
- 9. June 8, 2022 HW/SW Platform Architectural Mappings C/ C++ Scenarios PIM (App) M2T Tools SW Synthesis (mSSYN) Simulation model Synthesis (mSSYN) VIPPE Introduction Ō¢¬ S3D: System Modeling & Simulation 9
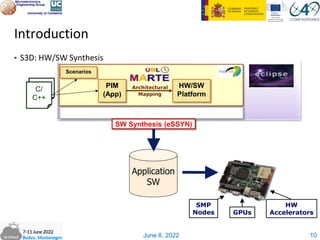
- 10. June 8, 2022 HW/SW Platform Architectural Mapping C/ C++ Scenarios PIM (App) M2T Tools SW Synthesis (eSSYN) SMP Nodes GPUs HW Accelerators Application SW Introduction Ō¢¬ S3D: HW/SW Synthesis 10
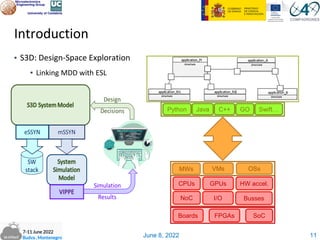
- 11. June 8, 2022 Introduction Ō¢¬ S3D: Design-Space Exploration Ō¢¬ Linking MDD with ESL Python Java C++ GO SwiftŌĆ” SoC FPGAs Boards NoC HW accel. I/O Busses GPUs CPUs MWs VMs OSs 11
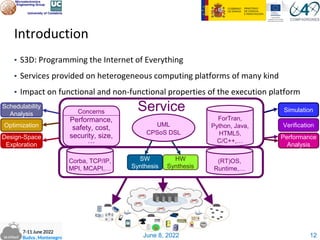
- 12. June 8, 2022 Introduction Ō¢¬ S3D: Programming the Internet of Everything Ō¢¬ Services provided on heterogeneous computing platforms of many kind Ō¢¬ Impact on functional and non-functional properties of the execution platform HW Synthesis SW Synthesis (RT)OS, Runtime,ŌĆ” Corba, TCP/IP, MPI, MCAPI,ŌĆ” ForTran, Python, Java, HTML5, C/C++,ŌĆ” Concerns Performance, safety, cost, security, size, ŌĆ” Schedulability Analysis Simulation Verification Performance Analysis Design-Space Exploration Optimization Service UML CPSoS DSL UML CPSoS DSL 12
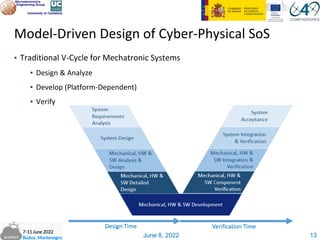
- 13. June 8, 2022 Model-Driven Design of Cyber-Physical SoS Ō¢¬ Traditional V-Cycle for Mechatronic Systems Ō¢¬ Design & Analyze Ō¢¬ Develop (Platform-Dependent) Ō¢¬ Verify 13
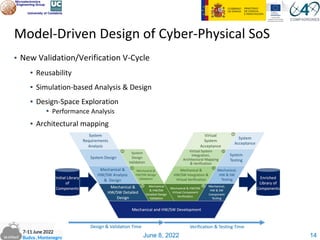
- 14. June 8, 2022 Model-Driven Design of Cyber-Physical SoS Ō¢¬ New Validation/Verification V-Cycle Ō¢¬ Reusability Ō¢¬ Simulation-based Analysis & Design Ō¢¬ Design-Space Exploration Ō¢¬ Performance Analysis Ō¢¬ Architectural mapping 14
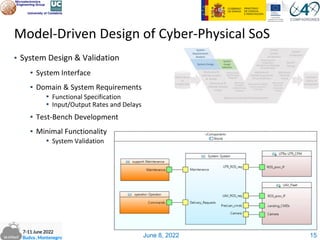
- 15. June 8, 2022 Model-Driven Design of Cyber-Physical SoS Ō¢¬ System Design & Validation Ō¢¬ System Interface Ō¢¬ Domain & System Requirements Ō¢¬ Functional Specification Ō¢¬ Input/Output Rates and Delays Ō¢¬ Test-Bench Development Ō¢¬ Minimal Functionality Ō¢¬ System Validation 15
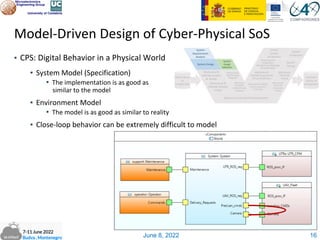
- 16. June 8, 2022 Ō¢¬ CPS: Digital Behavior in a Physical World Ō¢¬ System Model (Specification) Ō¢¬ The implementation is as good as similar to the model Ō¢¬ Environment Model Ō¢¬ The model is as good as similar to reality Ō¢¬ Close-loop behavior can be extremely difficult to model Model-Driven Design of Cyber-Physical SoS 16
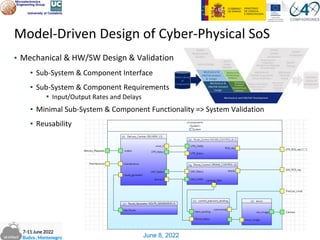
- 17. June 8, 2022 Model-Driven Design of Cyber-Physical SoS Ō¢¬ Mechanical & HW/SW Design & Validation Ō¢¬ Sub-System & Component Interface Ō¢¬ Sub-System & Component Requirements Ō¢¬ Input/Output Rates and Delays Ō¢¬ Minimal Sub-System & Component Functionality => System Validation Ō¢¬ Reusability
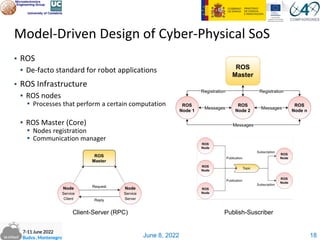
- 18. June 8, 2022 Model-Driven Design of Cyber-Physical SoS Ō¢¬ ROS Ō¢¬ De-facto standard for robot applications Ō¢¬ ROS Infrastructure Ō¢¬ ROS nodes Ō¢¬ Processes that perform a certain computation Ō¢¬ ROS Master (Core) Ō¢¬ Nodes registration Ō¢¬ Communication manager 18 Client-Server (RPC) Publish-Suscriber
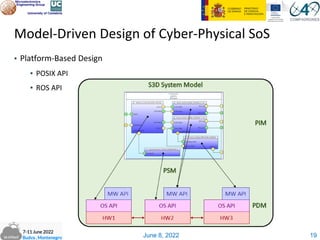
- 19. June 8, 2022 Model-Driven Design of Cyber-Physical SoS Ō¢¬ Platform-Based Design Ō¢¬ POSIX API Ō¢¬ ROS API 19
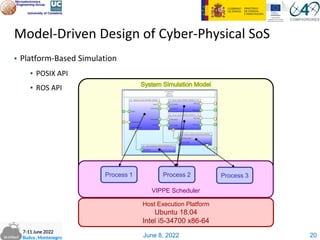
- 20. June 8, 2022 VIPPE Scheduler Host Execution Platform Ubuntu 18.04 Intel i5-34700 x86-64 Process 1 Process 2 Process 3 Model-Driven Design of Cyber-Physical SoS Ō¢¬ Platform-Based Simulation Ō¢¬ POSIX API Ō¢¬ ROS API 20
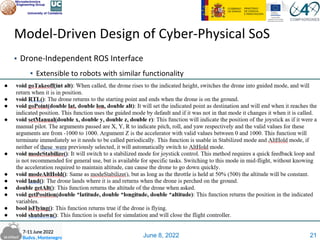
- 21. June 8, 2022 Model-Driven Design of Cyber-Physical SoS Ō¢¬ Drone-Independent ROS Interface Ō¢¬ Extensible to robots with similar functionality 21
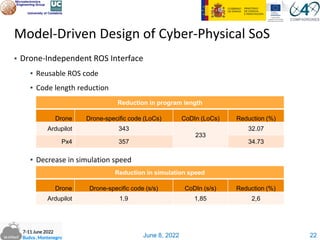
- 22. June 8, 2022 Model-Driven Design of Cyber-Physical SoS Ō¢¬ Drone-Independent ROS Interface Ō¢¬ Reusable ROS code Ō¢¬ Code length reduction Ō¢¬ Decrease in simulation speed 22 Reduction in program length Drone Drone-specific code (LoCs) CoDIn (LoCs) Reduction (%) Ardupilot 343 233 32.07 Px4 357 34.73 Reduction in simulation speed Drone Drone-specific code (s/s) CoDIn (s/s) Reduction (%) Ardupilot 1.9 1,85 2,6
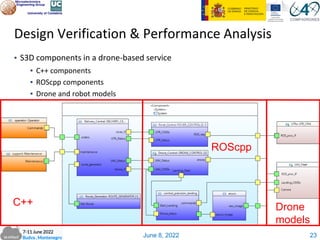
- 23. June 8, 2022 Ō¢¬ S3D components in a drone-based service Ō¢¬ C++ components Ō¢¬ ROScpp components Ō¢¬ Drone and robot models Design Verification & Performance Analysis C++ ROScpp Drone models 23
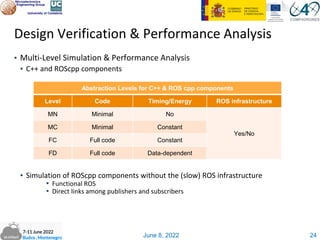
- 24. June 8, 2022 Ō¢¬ Multi-Level Simulation & Performance Analysis Ō¢¬ C++ and ROScpp components Ō¢¬ Simulation of ROScpp components without the (slow) ROS infrastructure Ō¢¬ Functional ROS Ō¢¬ Direct links among publishers and subscribers Design Verification & Performance Analysis Abstraction Levels for C++ & ROS cpp components Level Code Timing/Energy ROS infrastructure MN Minimal No Yes/No MC Minimal Constant FC Full code Constant FD Full code Data-dependent 24
- 25. June 8, 2022 Ō¢¬ Native Simulation: Flaxibility + accuracy ŌĆ” Overflow = 0; s = 1L; for (i = 0; i < L_subfr; i++) { Carry = 0; s = L_macNs(s, xn[i], y1[i]); if (Overflow != 0) { break; }} if (Overflow == 0) { exp_xy = norm_l(s); if (exp_xy<=0) xy = round(L_shr (s, -exp_xy)); else xy = round(L_shl (s, exp_xy)); } mutex_lock(mutex_name); ŌĆ” Global variable int Sim_Time = 0; Sim_Time += TB(); Sim_Time += TB(); Sim_Time += TB(); Sim_Time += TB(); Sim_Time += TB(); Sim_Time += TB(); wait included TB() is a function of # of binary instructions type of instructions # of cache misses frequency ŌĆ” even data dependencies Sim_Time += TSYS(); TSYS() is a function of preemptions conflicts in the busŌĆ” Design Verification & Performance Analysis 25
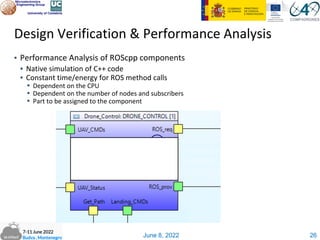
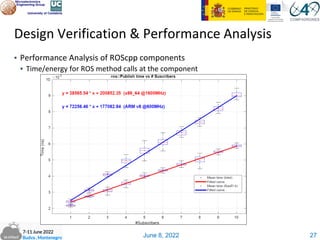
- 26. June 8, 2022 Native Simulation Ō¢¬ Performance Analysis of ROScpp components Ō¢¬ Native simulation of C++ code Ō¢¬ Constant time/energy for ROS method calls Ō¢¬ Dependent on the CPU Ō¢¬ Dependent on the number of nodes and subscribers Ō¢¬ Part to be assigned to the component Design Verification & Performance Analysis 26
- 27. June 8, 2022 Ō¢¬ Performance Analysis of ROScpp components Ō¢¬ Time/energy for ROS method calls at the component Design Verification & Performance Analysis 27
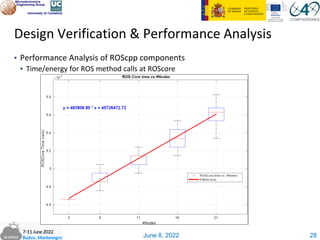
- 28. June 8, 2022 Ō¢¬ Performance Analysis of ROScpp components Ō¢¬ Time/energy for ROS method calls at ROScore Design Verification & Performance Analysis 28
- 29. June 8, 2022 Ō¢¬ Performance Analysis Ō¢¬ Estimation Error Design Verification & Performance Analysis 29 Frequency (MHz) Estimated Time (ms) Measured Time (ms) Estimation Error (%) Intel 1600 485.87 582.58 16.60 3000 318.62 461.46 30.95 ARM 600 521.46 904.95 42.38 1500 233.96 398.26 41.25
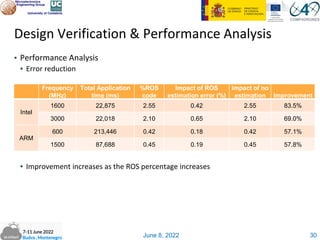
- 30. June 8, 2022 Ō¢¬ Performance Analysis Ō¢¬ Error reduction Ō¢¬ Improvement increases as the ROS percentage increases Design Verification & Performance Analysis 30 Frequency (MHz) Total Application time (ms) %ROS code Impact of ROS estimation error (%) Impact of no estimation Improvement Intel 1600 22,875 2.55 0.42 2.55 83.5% 3000 22,018 2.10 0.65 2.10 69.0% ARM 600 213,446 0.42 0.18 0.42 57.1% 1500 87,688 0.45 0.19 0.45 57.8%
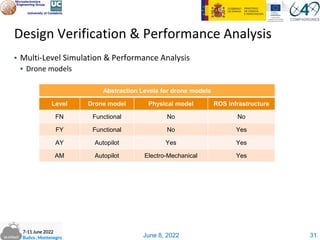
- 31. June 8, 2022 Ō¢¬ Multi-Level Simulation & Performance Analysis Ō¢¬ Drone models Design Verification & Performance Analysis Abstraction Levels for drone models Level Drone model Physical model ROS infrastructure FN Functional No No FY Functional No Yes AY Autopilot Yes Yes AM Autopilot Electro-Mechanical Yes 31
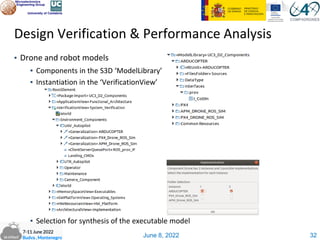
- 32. June 8, 2022 Ō¢¬ Drone and robot models Ō¢¬ Components in the S3D ŌĆśModelLibraryŌĆÖ Ō¢¬ Instantiation in the ŌĆśVerificationViewŌĆÖ Ō¢¬ Selection for synthesis of the executable model Design Verification & Performance Analysis 32
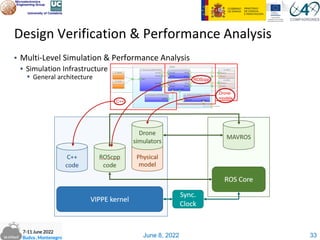
- 33. June 8, 2022 Ō¢¬ Multi-Level Simulation & Performance Analysis Ō¢¬ Simulation Infrastructure Ō¢¬ General architecture Design Verification & Performance Analysis 33
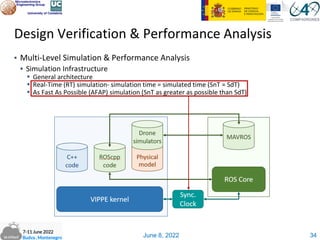
- 34. June 8, 2022 Ō¢¬ Multi-Level Simulation & Performance Analysis Ō¢¬ Simulation Infrastructure Ō¢¬ General architecture Ō¢¬ Real-Time (RT) simulation- simulation time = simulated time (SnT = SdT) Ō¢¬ As Fast As Possible (AFAP) simulation (SnT as greater as possible than SdT) Design Verification & Performance Analysis 34
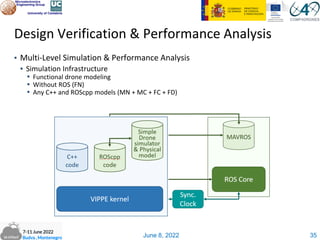
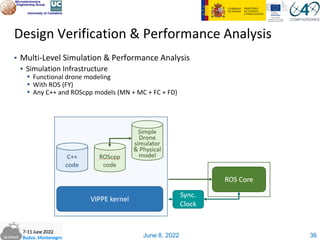
- 35. June 8, 2022 Ō¢¬ Multi-Level Simulation & Performance Analysis Ō¢¬ Simulation Infrastructure Ō¢¬ Functional drone modeling Ō¢¬ Without ROS (FN) Ō¢¬ Any C++ and ROScpp models (MN + MC + FC + FD) Design Verification & Performance Analysis 35
- 36. June 8, 2022 Ō¢¬ Multi-Level Simulation & Performance Analysis Ō¢¬ Simulation Infrastructure Ō¢¬ Functional drone modeling Ō¢¬ With ROS (FY) Ō¢¬ Any C++ and ROScpp models (MN + MC + FC + FD) Design Verification & Performance Analysis 36
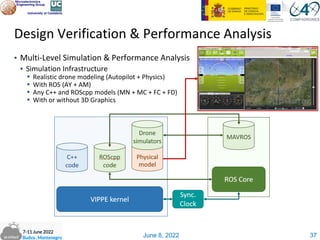
- 37. June 8, 2022 Ō¢¬ Multi-Level Simulation & Performance Analysis Ō¢¬ Simulation Infrastructure Ō¢¬ Realistic drone modeling (Autopilot + Physics) Ō¢¬ With ROS (AY + AM) Ō¢¬ Any C++ and ROScpp models (MN + MC + FC + FD) Ō¢¬ With or without 3D Graphics Design Verification & Performance Analysis 37
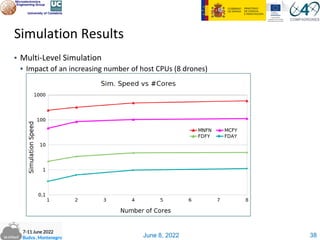
- 38. June 8, 2022 Ō¢¬ Multi-Level Simulation Ō¢¬ Impact of an increasing number of host CPUs (8 drones) Simulation Results 38
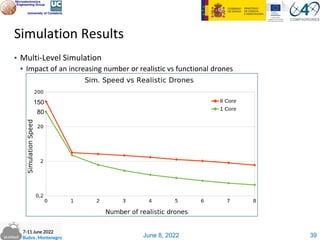
- 39. June 8, 2022 Ō¢¬ Multi-Level Simulation Ō¢¬ Impact of an increasing number or realistic vs functional drones Simulation Results 150 80 39
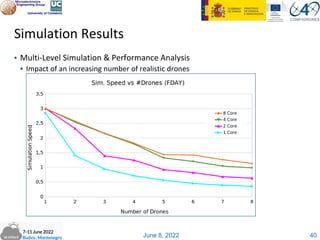
- 40. June 8, 2022 Simulation Results Ō¢¬ Multi-Level Simulation & Performance Analysis Ō¢¬ Impact of an increasing number of realistic drones 40
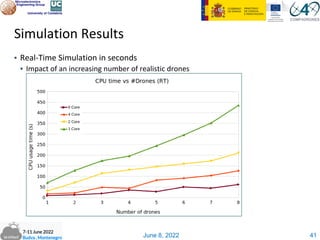
- 41. June 8, 2022 Ō¢¬ Real-Time Simulation in seconds Ō¢¬ Impact of an increasing number of realistic drones Simulation Results 41
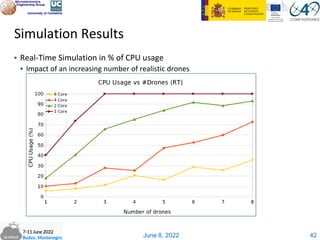
- 42. June 8, 2022 Simulation Results Ō¢¬ Real-Time Simulation in % of CPU usage Ō¢¬ Impact of an increasing number of realistic drones 42
- 43. June 8, 2022 Conclusions Ō¢¬ Services based on CPS demand new design methods and tools Ō¢¬ e.g. Drone-based Services Ō¢¬ Close interaction between the physical world and the digital electronics Ō¢¬ Model-Driven System Design is a powerful candidate Ō¢¬ HiL & SiL are not enough Ō¢¬ Model in the loop (MiL) is required Ō¢¬ Extension of the classical V-Cycle Ō¢¬ Multi-Level Simulation is key in designing drone-based services Ō¢¬ As Fast As Possible vs Real-Time Ō¢¬ Drones are just pieces inside a complex, distributed functionality Ō¢¬ S3D is a valid approach towards MDD of drone-based services 43
- 44. June 8, 2022 Acknowledgement Ō¢¬ Last Research Results from many people Ō¢¬ Hector Posadas Ō¢¬ Javier Merino Ō¢¬ Raul Gonzalez Ō¢¬ Jose Maria Gandara Ō¢¬ ŌĆ” and the rest of the Microelectronics Engineering Group 44
- 45. June 8, 2022 Any comment/question? 45