



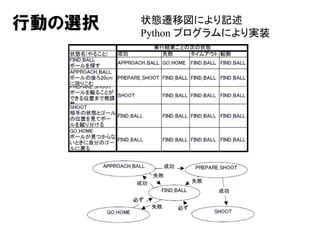
![––Ą””õ Ų•◊•Ū•į•ť•ŗ§őņż
def sample_2search(robot):
ball = robot.GetLocalPos(robot.HLOBJECT_BALL, robot.HLCOLOR_BALL)
if len(ball) == 0:
return
x, y, the = ball[0]
angle = math.degrees(math.atan2(y,x))
robot.PanDeg(angle)
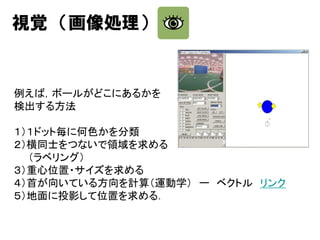
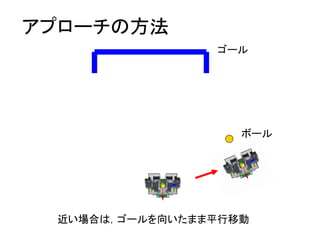
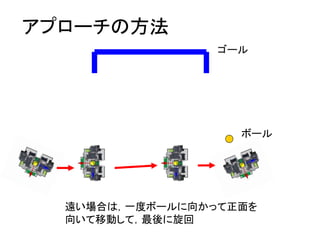
ņż§®§–£¨ ◊§ÚĽō§∑§∆•‹©`•Ž§Ú•»•ť•√•≠•ů•į§Ļ§Ž•◊•Ū•į•ť•ŗ§ő÷ų“™
≤Ņ§Ō“‘Ō¬§ő§Ť§¶§ň§ §Ž
°ĺ•Ū•‹•√•»◊ýėň°Ņ§»°ĺ•’•£©`•Ž•…◊ýėň°Ņ§ő£≤∑NÓź§Ú…Ō ÷§Į Ļ§§∑÷§Ī§Ž
§≥§»§¨÷ō“™§«§Ę§Ž](https://image.slidesharecdn.com/150724citbrains-160207065903/85/150724-cit-brains-14-320.jpg)



150724 cit brains
- 1. RoboCup§»§Ō RoboCup ©` •Ū•‹•√•»ľľ–g§ÚĪ»›^§∑£¨Ļęť_§∑£¨įk’Ļ§Ķ§Ľ§ŽąŲ •Ń•ß•Ļ§ §…§»ĀK§÷ėňú ÜĖÓ} »ňÓź§őŐŰĎť£° °Ų•Ķ•√•ę©`•Í©`•į§őńŅėň őųē∑£≤£į£Ķ£įńͧř§«§ň•Ô©`•Ž•…•ę•√•◊§ő•Ń•„•ů•‘•™•ů•Ń©`•ŗ§ňĄŔ §∆§Ž◊‘¬…–Õ•Ū•‹•√•»§ő•Ń©`•ŗ§Ú◊ų§Ž §Ĺ§őŖ^≥Ő§« °ū•Ū•‹•√•»Ļ§—ߧ»»ňĻ§÷™ń‹§ő»ŕļŌ?įk’Ļ§ÚńŅ÷ł§Ļ£ģ ĺŖŐŚĶń§ň§Ō£¨ °ū•≥•ů•∆•Ļ•»§ņ§Ī§«§Ō§ §Į£¨—ß–gĽŠ◊h§¨Õ¨ēr§ňť_īŖ§Ķ§ž§Ž£ģ °ūĄŔņŻ§∑§Ņ•Ń©`•ŗ§ň§Ō£¨«ťąůĻęť_§őŃxĄ’§¨…ķ§ł§Ž£ģ °ķ«ťąů§ÚĻ≤”–ĽĮ§Ļ§Ž§≥§»§«£¨ľ”ňŔĶń§ňľľ–g§őįk’Ļ§ÚńŅ÷ł§Ļ
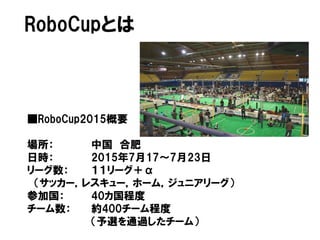
- 2. RoboCup§»§Ō °ŲRoboCup2015łŇ“™ ąŲňý£ļ ÷–Ļķ ļŌ∑ »’ēr£ļ 2015ńÍ7‘¬17°ę7‘¬23»’ •Í©`•į ż£ļ £Ī£Ī•Í©`•į£ę¶Ń £®•Ķ•√•ę©`£¨•ž•Ļ•≠•Ś©`£¨•Ř©`•ŗ£¨•ł•Ś•ň•Ę•Í©`•į£© ≤őľ”Ļķ£ļ 40•ęĻķ≥Ő∂» •Ń©`•ŗ ż£ļ ľs400•Ń©`•ŗ≥Ő∂» £®”ŤŖx§ÚÕ®Ŗ^§∑§Ņ•Ń©`•ŗ£©
- 4. «ß»~Ļ§ėIīů—ߧőĹYĻŻ CIT Brains •Ķ•√•ę©`•“•Ś©`•ř•ő•§•…•Í©`•į ņĹÁīůĽŠ •≠•√•…•Ķ•§•ļ4on4•Ķ•√•ę©` £ĪőĽ ņĹÁīůĽŠ •≠•√•…•Ķ•§•ļ•∆•Į•ň•ę•Ž•Ń•„•ž•ů•ł £ĪőĽ ņĹÁīůĽŠ •Ę•ņ•Ž•»•Ķ•§•ļ•∆•Į•ň•ę•Ž•Ń•„•ž•ů•ł £≤őĽ
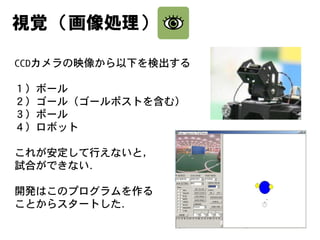
- 8. “ē“ô £®Ľ≠ŌŮĄIņŪ£© ņż§®§–£¨•‹©`•Ž§¨§…§≥§ň§Ę§Ž§ę§Ú ó ≥Ų§Ļ§Ž∑Ĺ∑® £Ī£©£Ī•…•√•»öį§ňļő…ę§ę§Ú∑÷Óź £≤£©ļŠÕ¨ Ņ§Ú§ń§ §§§«ÓI”Ú§Ú«ů§Š§Ž £®•ť•Ŕ•Í•ů•į£© £≥£©÷ō–ńőĽ÷√?•Ķ•§•ļ§Ú«ů§Š§Ž £ī£© ◊§¨ŌÚ§§§∆§§§Ž∑ĹŌÚ§Ú”čň„£®Ŗ\Ą”—ߣ© ©` •Ŕ•Į•»•Ž •Í•ů•Į £Ķ£©Ķō√ś§ňÕ∂”į§∑§∆őĽ÷√§Ú«ů§Š§Ž£ģ
- 14. ––Ą””õ Ų•◊•Ū•į•ť•ŗ§őņż def sample_2search(robot): ball = robot.GetLocalPos(robot.HLOBJECT_BALL, robot.HLCOLOR_BALL) if len(ball) == 0: return x, y, the = ball[0] angle = math.degrees(math.atan2(y,x)) robot.PanDeg(angle) ņż§®§–£¨ ◊§ÚĽō§∑§∆•‹©`•Ž§Ú•»•ť•√•≠•ů•į§Ļ§Ž•◊•Ū•į•ť•ŗ§ő÷ų“™ ≤Ņ§Ō“‘Ō¬§ő§Ť§¶§ň§ §Ž °ĺ•Ū•‹•√•»◊ýėň°Ņ§»°ĺ•’•£©`•Ž•…◊ýėň°Ņ§ő£≤∑NÓź§Ú…Ō ÷§Į Ļ§§∑÷§Ī§Ž §≥§»§¨÷ō“™§«§Ę§Ž
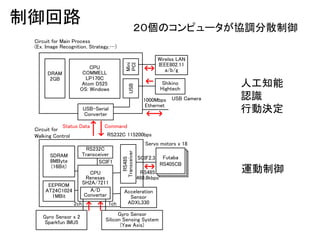
- 16. ÷∆”ýĽō¬∑ »ňĻ§÷™ń‹ ’J◊R ––Ą”õQ∂® Ŗ\Ą”÷∆”ý £≤£įāħő•≥•ů•‘•Ś©`•Ņ§¨Öf’{∑÷…Ę÷∆”ý Servo motors x 18 RS485 Transceiver CPU Renesas SH2A/7211 RS232C Transceiver EEPROM AT24C1024 1MBit SDRAM 8MByte (16Bit) Circuit for Walking Control A/D Converter Gyro Sensor x 2 Sparkfun IMU5 Gyro Sensor Silicon Sensing System (Yaw Axis) Circuit for Main Process (Ex. Image Recognition, Strategy,°≠) RS485 460.8kbps CommandStatus Data SCIF1 SCIF2,3 1ch2ch 1000Mbps Ethernet Futaba RS405CB RS232C 115200bps CPU COMMELL LP170C Atom D525 OS: Windows DRAM 2GB USB USB-Serial Converter USB Camera Wirelss LAN IEEE802.11 a/b/g Shikino Hightech Acceleration Sensor ADXL330 Mini PCI
- 20. •Ę•◊•Ū©`•Ń§ő∑Ĺ∑® •ī©`•Ž •‹©`•Ž Ŗh§§ąŲļŌ§Ō£¨“Ľ∂»•‹©`•Ž§ňŌÚ§ę§√§∆’ż√ś§Ú ŌÚ§§§∆“∆Ą”§∑§∆£¨◊ÓŠŠ§ň–żĽō
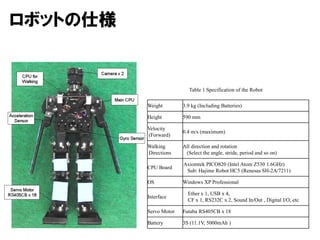
- 25. •Ū•‹•√•»§ő ňėĒ Table 1 Specification of the Robot Weight 3.9 kg (Including Batteries) Height 590 mm Velocity (Forward) 0.4 m/s (maximum) Walking Directions All direction and rotation (Select the angle, stride, period and so on) CPU Board Axiomtek PICO820 (Intel Atom Z530 1.6GHz) Sub: Hajime Robot HC5 (Renesas SH-2A/7211) OS Windows XP Professional Interface Ether x 1, USB x 4, CF x 1, RS232C x 2, Sound In/Out , Digital I/O, etc Servo Motor Futaba RS405CB x 18 Battery 3S (11.1V, 5000mAh )