²Ń¾±°ģ²¹²Ō°æ³§¤Č×Ō×÷°ä±Ź±«¤ņ±«³§µž¤Ē½Ó¾A¤¹¤ė
?Download as PPTX, PDF?
0 likes?381 views

MikanOS¤Ė“īŻd¤·¤æUSB CDC„Ʉ鄤„Š¤ņÓƤ¤¤Ę”¢×Ō×÷CPU¤ĖCŠµÕZ¤ņĖĶŠÅ¤¹¤ė·½·Ø¤ņÕhĆ÷¤·¤Ž¤¹”£

![/15
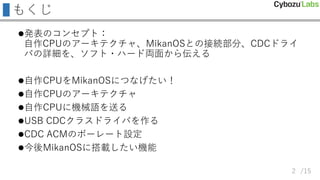
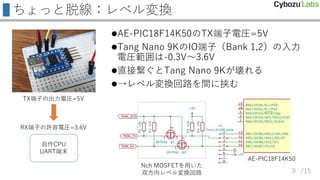
×Ō×÷CPU¤Ī„¢©`„„Ę„Æ„Į„ć
„³©`„ė
„¹„æ„Ć„Æ
„į„¤„ó„į„ā„ź
£ØFPGAÄŚŹiBRAM£©
0x000
0x200
0x3ff
CŠµÕZ
„ׄķ„°„é„ą
PC
ALU
FP
„¢„É„ģ„¹
insn[15:0]
0
1
”
15
ŃŻĖćÓĆ„¹„æ„Ć„Æ
£Ø16„Ó„Ć„Č·ł£©
Õi¤ß³ö¤·„Ē©`„æ
BP
ų¤Žz¤ß„Ē©`„æ
CPU„³„¢
UART
ĖĶŹÜŠÅ
RX
TX
CŠµÕZ
ų¤Žz¤ß
4](https://image.slidesharecdn.com/connectmikanostomyhandmadecpubyusb-220724020559-725d4830/85/MikanOS-CPU-USB-4-320.jpg)
![/15
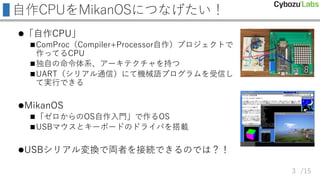
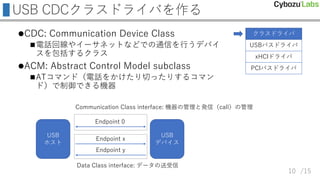
ĆüĮī„Ē„³©`„ɤȊÅŗž
PUSH imm15
ADD
LD imm8
ST imm8
STA
JMP imm8
„Ė©`„ā„Ė„Ć„Æ
xxxx
B002
90xx
94xx
9500
A0xx
CŠµÕZ CŠµÕZÉĻĪ»8„ӄƄȤĪ„Ē„³©`„ÉįįŠÅŗÅ
1_10_00_01_00_0_00_00
0_10_00_10_00_0_00_00
1_11_10_01_00_0_00_00
1_01_01_10_00_0_00_00
0_00_01_10_00_0_00_00
1_00_00_00_01_0_00_00
Imm 1=¼“ĆüĮī
Load 0=stack[0] 1=stack[1]Ӣ
2=ALU³öĮ¦ 3=„į„ā„ź
R 1=„į„ā„źÕiŽz
W 1=„į„ā„źųŽz
Pop 1=ŃŻĖćÓĆ„¹„æ„Ć„Æ¤«¤é„Ż„Ć„×
Push 1=ŃŻĖćÓĆ„¹„æ„Ć„Æ¤Ė„ׄƄ·„å
Jmp 0=„ø„ć„ó„פ·¤Ź¤¤”¢1=oĢõ¼ž
addr
data
a
b
addr
a
b
x
Load=0 & Pop=1
6](https://image.slidesharecdn.com/connectmikanostomyhandmadecpubyusb-220724020559-725d4830/85/MikanOS-CPU-USB-6-320.jpg)

![/15
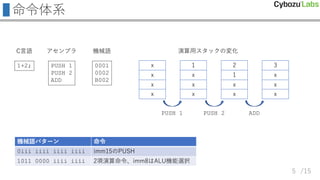
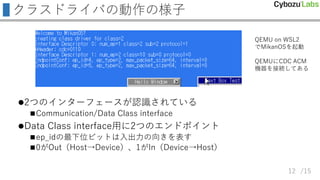
CDC„Ʉ鄤„Š¤Īg×°£ØŗŅ×°ę£©
Error CDCDriver::SendSerial(const void* buf, int len) {
uint8_t* buf_out = new uint8_t[len];
memcpy(buf_out, buf, len);
ParentDevice()->NormalOut(ep_bulk_out_, buf_out, len);
uint8_t* buf_in = new uint8_t[8];
ParentDevice()->NormalIn(ep_bulk_in_, buf_in, 8);
return MAKE_ERROR(Error::kSuccess);
}
int CDCDriver::ReceiveSerial(void* buf, int len) {
const auto recv_len =
std::min(len, static_cast<int>(receive_buf_.size()));
auto buf8 = reinterpret_cast<uint8_t*>(buf);
for (int i = 0; i < recv_len; ++i) {
buf8[i] = receive_buf_.front();
receive_buf_.pop_front();
}
return recv_len;
}
Out·½Ļņ¤Ī„Ø„ó„É„Ż„¤„ó„Č
¤Ē„Ē©`„æ¤ņĖĶŠÅ¤¹¤ė
In·½Ļņ¤Ī„Ø„ó„É„Ż„¤„ó„Č
¤Ė¤·ŹÜŠÅ¤ņ¤«¤±¤Ę¤Ŗ¤Æ
„Ē„Š„¤„¹¤«¤é„Ē©`„椬
ŹÜŠÅ¤µ¤ģ¤Ę¤¤¤ģ¤Š
receive_buf_¤Ė
„Ē©`„椬ų¤«¤ģ¤Ę¤¤¤ė
11](https://image.slidesharecdn.com/connectmikanostomyhandmadecpubyusb-220724020559-725d4830/85/MikanOS-CPU-USB-11-320.jpg)
²Ń¾±°ģ²¹²Ō°æ³§¤Č×Ō×÷°ä±Ź±«¤ņ±«³§µž¤Ē½Ó¾A¤¹¤ė
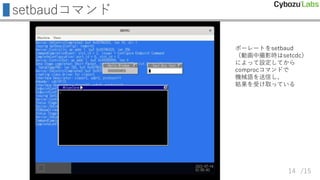
- 5. /15 ĆüĮīĢåĻµ 1+2; CŃŌÕZ PUSH 1 PUSH 2 ADD „¢„»„ó„Ö„é 0001 0002 B002 CŠµÕZ CŠµÕZ„Ń„æ©`„ó ĆüĮī 0iii iiii iiii iiii imm15¤ĪPUSH 1011 0000 iiii iiii 2ķŃŻĖćĆüĮī”¢imm8¤ĻALUCÄÜßxk x x x x 1 x x x 2 1 x x 3 x x x ŃŻĖćÓĆ„¹„æ„Ć„Æ¤Īä»Æ PUSH 1 PUSH 2 ADD 5
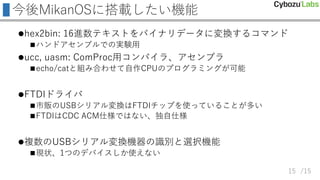
- 6. /15 ĆüĮī„Ē„³©`„ɤȊÅŗž PUSH imm15 ADD LD imm8 ST imm8 STA JMP imm8 „Ė©`„ā„Ė„Ć„Æ xxxx B002 90xx 94xx 9500 A0xx CŠµÕZ CŠµÕZÉĻĪ»8„ӄƄȤĪ„Ē„³©`„ÉįįŠÅŗÅ 1_10_00_01_00_0_00_00 0_10_00_10_00_0_00_00 1_11_10_01_00_0_00_00 1_01_01_10_00_0_00_00 0_00_01_10_00_0_00_00 1_00_00_00_01_0_00_00 Imm 1=¼“ĆüĮī Load 0=stack[0] 1=stack[1]”¢ 2=ALU³öĮ¦ 3=„į„ā„ź R 1=„į„ā„źÕiŽz W 1=„į„ā„źųŽz Pop 1=ŃŻĖćÓĆ„¹„æ„Ć„Æ¤«¤é„Ż„Ć„× Push 1=ŃŻĖćÓĆ„¹„æ„Ć„Æ¤Ė„ׄƄ·„å Jmp 0=„ø„ć„ó„פ·¤Ź¤¤”¢1=oĢõ¼ž addr data a b addr a b x Load=0 & Pop=1 6
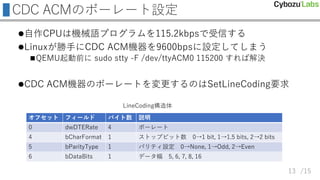
- 9. /15 ¤Į¤ē¤Ć¤ČĶŃ¾£ŗ„ģ„Ł„ėäQ ?AE-PIC18F14K50¤ĪTX¶Ė×ÓėR=5V ?Tang Nano 9K¤ĪIO¶Ė×Ó£ØBank 1,2£©¤ĪČėĮ¦ ėR¹ ģ¤Ļ-0.3V”«3.6V ?Ö±½Ó椰¤ČTang Nano 9K¤¬²¤ģ¤ė ?”ś„ģ„Ł„ėäQ»ŲĀ·¤ņég¤ĖŠ®¤ą ×Ō×÷CPU UART¶ĖÄ© TX¶Ė×Ó¤Ī³öĮ¦ėR=5V RX¶Ė×Ó¤ĪŌSČŻėR=3.6V Nch MOSFET¤ņÓƤ¤¤æ Ė«·½Ļņ„ģ„Ł„ėäQ»ŲĀ· AE-PIC18F14K50 9
- 10. /15 USB CDC„Ƅ鄹„Ʉ鄤„Š¤ņ×÷¤ė ?CDC: Communication Device Class ?ėŌ»Ų¾¤ä„¤©`„µ„Ķ„ƄȤŹ¤É¤Ē¤ĪĶ؊ŤņŠŠ¤¦„Ē„Š„¤ „¹¤ņ°üĄØ¤¹¤ė„Ƅ鄹 ?ACM: Abstract Control Model subclass ?AT„³„Ž„ó„É£ØėŌ¤ņ¤«¤±¤æ¤źĒŠ¤Ć¤æ¤ź¤¹¤ė„³„Ž„ó „É£©¤ĒÖĘÓł¤Ē¤¤ėCĘ÷ xHCI„Ʉ鄤„Š USB„Š„¹„Ʉ鄤„Š „Ƅ鄹„Ʉ鄤„Š PCI„Š„¹„Ʉ鄤„Š USB „Ū„¹„Č USB „Ē„Š„¤„¹ Endpoint 0 Endpoint x Endpoint y Communication Class interface: CĘ÷¤Ī¹ÜĄķ¤Č°kŠÅ£Øcall£©¤Ī¹ÜĄķ Data Class interface: „Ē©`„æ¤ĪĖĶŹÜŠÅ 10
- 11. /15 CDC„Ʉ鄤„Š¤Īg×°£ØŗŅ×°ę£© Error CDCDriver::SendSerial(const void* buf, int len) { uint8_t* buf_out = new uint8_t[len]; memcpy(buf_out, buf, len); ParentDevice()->NormalOut(ep_bulk_out_, buf_out, len); uint8_t* buf_in = new uint8_t[8]; ParentDevice()->NormalIn(ep_bulk_in_, buf_in, 8); return MAKE_ERROR(Error::kSuccess); } int CDCDriver::ReceiveSerial(void* buf, int len) { const auto recv_len = std::min(len, static_cast<int>(receive_buf_.size())); auto buf8 = reinterpret_cast<uint8_t*>(buf); for (int i = 0; i < recv_len; ++i) { buf8[i] = receive_buf_.front(); receive_buf_.pop_front(); } return recv_len; } Out·½Ļņ¤Ī„Ø„ó„É„Ż„¤„ó„Č ¤Ē„Ē©`„æ¤ņĖĶŠÅ¤¹¤ė In·½Ļņ¤Ī„Ø„ó„É„Ż„¤„ó„Č ¤Ė¤·ŹÜŠÅ¤ņ¤«¤±¤Ę¤Ŗ¤Æ „Ē„Š„¤„¹¤«¤é„Ē©`„椬 ŹÜŠÅ¤µ¤ģ¤Ę¤¤¤ģ¤Š receive_buf_¤Ė „Ē©`„椬ų¤«¤ģ¤Ę¤¤¤ė 11
- 12. /15 „Ƅ鄹„Ʉ鄤„Š¤ĪÓ×÷¤Ī×Ó ?2¤Ä¤Ī„¤„ó„æ©`„Õ„§©`„¹¤¬ÕJ×R¤µ¤ģ¤Ę¤¤¤ė ?Communication/Data Class interface ?Data Class interfaceÓƤĖ2¤Ä¤Ī„Ø„ó„É„Ż„¤„ó„Č ?ep_id¤Ī×īĻĀĪ»„ӄƄȤĻČė³öĮ¦¤ĪĻņ¤¤ņ±ķ¤¹ ?0¤¬Out£ØHost”śDevice£©”¢1¤¬In£ØDevice”śHost£© QEMU on WSL2 ¤ĒMikanOS¤ņĘšÓ QEMU¤ĖCDC ACM CĘ÷¤ņ½Ó¾A¤·¤Ę¤¢¤ė 12
- 13. /15 CDC ACM¤Ī„Ü©`„ģ©`„ČŌO¶Ø ?×Ō×÷CPU¤ĻCŠµÕZ„ׄķ„°„é„ą¤ņ115.2kbps¤ĒŹÜŠÅ¤¹¤ė ?Linux¤¬ŁŹÖ¤ĖCDC ACMCĘ÷¤ņ9600bps¤ĖŌO¶Ø¤·¤Ę¤·¤Ž¤¦ ?QEMUĘšÓĒ°¤Ė sudo stty -F /dev/ttyACM0 115200 ¤¹¤ģ¤Š½āQ ?CDC ACMCĘ÷¤Ī„Ü©`„ģ©`„Ȥņäøü¤¹¤ė¤Ī¤ĻSetLineCodingŅŖĒó „Ŗ„Õ„»„Ć„Č „Õ„£©`„ė„É „Š„¤„ČŹż ÕhĆ÷ 0 dwDTERate 4 „Ü©`„ģ©`„Č 4 bCharFormat 1 „¹„ȄƄׄӄƄȏż 0”ś1 bit, 1”ś1.5 bits, 2”ś2 bits 5 bParityType 1 „Ń„ź„Ę„£ŌO¶Ø 0”śNone, 1”śOdd, 2”śEven 6 bDataBits 1 „Ē©`„æ·ł 5, 6, 7, 8, 16 LineCodingŌģĢå 13
- 15. /15 ½ńįįMikanOS¤Ė“īŻd¤·¤æ¤¤CÄÜ ?hex2bin: 16ßMŹż„Ę„„¹„Ȥņ„Š„¤„Ź„ź„Ē©`„æ¤ĖäQ¤¹¤ė„³„Ž„ó„É ?„Ļ„ó„É„¢„»„ó„Ö„ė¤Ē¤ĪgņYÓĆ ?ucc, uasm: ComProcÓĆ„³„ó„Ń„¤„锢„¢„»„ó„Ö„é ?echo/cat¤Č½M¤ßŗĻ¤ļ¤»¤Ę×Ō×÷CPU¤Ī„ׄķ„°„é„ß„ó„°¤¬æÉÄÜ ?FTDI„Ʉ鄤„Š ?ŹŠŲ¤ĪUSB„·„ź„¢„ėäQ¤ĻFTDI„Į„ƄפņŹ¹¤Ć¤Ę¤¤¤ė¤³¤Č¤¬¶ą¤¤ ?FTDI¤ĻCDC ACMŹĖ¤Ē¤Ļ¤Ź¤¤”¢¶Ą×ŌŹĖ ?Ń}Źż¤ĪUSB„·„ź„¢„ėäQCĘ÷¤Ī×Re¤ČßxkCÄÜ ?¬Fד”¢1¤Ä¤Ī„Ē„Š„¤„¹¤·¤«Ź¹¤Ø¤Ź¤¤ 15