










Makalah pii final
- 1. MAKALAH PENGANTAR INSTRUMENTASI INDUSTRI ALAT PENGATUR KETINGGIAN AIR PADA BENDUNGAN Penulis: Anang Hardoyo 05/185215/PA/10435 Puji Priyono T. 05/185889/PA/10454 M. Zainal Arif 05/185947/PA/10471 PROGRAM STUDI ELEKTRONIKA DAN INSTRUMENTASI FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS GADJAH MADA YOGYAKARTA 2007
- 2. ALAT PENGATUR KETINGGIAN AIR PADA BENDUNGAN Abstrak Pada bendungan-bendungan yang sudah ada, digunakan pintu air untuk mengatur banyaknya air dalam bedungan itu. Pintu air dikendalikan oleh manusia, yang bertugas menjaga supaya air dalam bendungan tetap stabil. Dalam hal ini air tidak kurang dan tidak melebihi batas yang sudah ada. Oleh karena itu, petugas penjaga pintu air harus siap siaga setiap saat. Tapi sangat tidak mungkin petugas itu setiap saat ada untuk menjaga pintu air. Alat ini berguna sebagai pengganti sebagian atau bahkan seluruh kerja dari seorang operator. Dipilihnya ide ini karena masih banyak digunakan pengendali pintu air bendungan yang menggunakan teknik manual, menggunakan tenaga manusia untuk membuka dan menutup pintu air itu. Oleh karena itu dibuat alat ini untuk meringankan pekerjaan serta memudahkan dalam pegawasan terhadap air yang berada dalam bendungan tersebut. Alat ini akan setiap saat mengawasi ketinggian air pada bendungan, menggunakan sensor ultrasonic dan dibantu dengan mikokontroler. Yang nantinya akan secara otomatis membuka pntu air jika ketinggian air telah melewati batas, dan akan menutup jika ketinggian air sudah mencapai normal. Sehingga didapatkan suatu ketinggian air yang sesuai dengan keinginan user/operator. Dengan begitu tidak dibutuhkan lagi tenaga manusia untuk menjaga pintu air, sehingga tenaga manusia itu bisa digunakan pada bidang lain. Dengan kata lain akan terjadi efektifitas dan efisiensi. Keywords: pintu air, bendungan, irigasi, ketinggian air
- 3. A. PENDAHULUAN Dalam pertanian sebuah sistem irigasi yang baik sangat diperlukan untuk menunjang panen / hasil pertanian. Dalam sebuah sistem irigasi terdapat berbagai alat mekanik pengendali/pengontrol aliran air,misalnya saja: • Pengontrol Hulu vs. Hilir • Pengendali Pintu air • Penyadapan(Pintu Air) Alat-alat pengendali diatas berguna untuk mendukung sistem irigasi agar berjalan secara baik. Alat-alat pengendali tersebut dalam sistem irigasi digunakan untuk: • Mengontrol tinggi muka air • Mengukur debit aliran air • Mengontrol debit aliran Akan tetapi, dalam sistem irigasi sering dijumpai permasalahan antara lain: • Penyaluran yang tidak diinginkan • Adanya hujan yang tidak diharapkan • Kurangnya debit karna kekeringan • Penghentian penyaluran yang tidak diinginkan • Tidak akuratnya alat pengukur aliran air • Tidak akuratnya teknik pengontrol aliran • Karakteristik gelombang aliran air • Human factor misalnya saja kemalasan, kecurangan dan lain sebagainya. Dalam makalah ini akan secara khusus dibahas mengenai pengontrol ketinggian dan aliran air dalam sebuah sistem irigasi. Pengontrolan ketinggian air merupakan salah satu hal yang paling penting dalam sebuah sistem irigasi. Ketinggian air dalam sebuah sistem irigasi akan mempengaruhi hal-hal atau parameter-parameter lain dalam sistem tersebut. Pengontrolan ketinggian air dalam sebuah sistem irigasi dapat dilakukan secara: • Manual Operasi atau pengamatan yang dilakukan oleh manusia (secara langsung). isebut juga “pengamatan terbuka (open loop)” apabila mengacu ke fungsi pengendalian.
- 4. • Otomatis Operasi atau pengamatan dilakukan tanpa campur tangan manusia. Disebut juga “pengamatan tertutup (closed loop)” apabila mengacu ke fungsi pengendalian. • Remote (Jarak Jauh) Suatu operasi atau tata kerja yang dilakukan dari jauh. Dengan modernisasi, hal ini biasa lebih dipahami melibatkan peralatan, bukan pada aksi yang dilakukan manusia di lapangan. Suatu sistim “remote” mempunyai signal terhubung dari lapangan ke kantor pusat atau dari kantor lapangan atau kedua arah. Dalam pengontrolan ketinggian air terdapat dua macam pengendalian ketinggian air, yaitu: • Pengendali Jarak Jauh Pengendali yang menggerakan suatu alat dilapangan dari lokasi yang jauh (umumnya dari kantor). Hal ini dapat berupa otomatis atau manual. • Pengendalian Lokal Pengendalian untuk menggerakkan peralatan lapangan yang dilakukan ditempat tersebut (on-site). Hal ini dapat berupa otomatis atau manual. Dalam makalah ini akan secara khusus dibahas pengendalian lokal ketinggian air dalam sebuah sistem irigasi secara otomatis. Dengan pengendalian lokal ketinggian air secara otomatis, maka akan menambah efisiensi dan efektifitas dari sistem tersebut. Kemudian akan mengurangi permasalahan-permasalahan dalam sebuah sistem irigasi. Dengan adanya sistem irigasi pengendalian ketinggian air secara otomatis, diharapkan akan menghasilkan pelayanan yang baik serta efisiensi yang tinggi serta responsive. Sebuah tindakan penyelesaian akan diambil secara cepat tanpa harus menunggu terlalu lama. Selain itu mengurangi pengeluaran biaya untuk pembiayaan SDM. Selain itu mengurangi permasalahan yang disebabkan kesalahan dari factor manusia.
- 5. B. PERANCANGAN SISTEM Blok diagram Keterangan: 1. Default Data Input Data awal dimasukkan melalui bagian ini, data ini digunakan sebagai data pembading. Sehingga nanti data yang dimasukkan ini akan dibandingkan dengan data yang terbaca oleh sensor ultrasonic. Data yang dimasukkan adalah data dari keypad matrik yang akan dimasukkan ke mikrokontroler. Selanjutnya oleh mikrokontroler, data tesebut akan diterjemahkan. Data dari keypad dirubah menjadi data 8 bit. Data default yang dimasukkan hanya sekali, pada saat setting alat. Data tersebut merupakan data yang digunakan sebagai pembanding. Data in yang akan terus menerus digunakan sebagai acuan. 2. Sensor Ultrasonic Sensor ultrasonic berfungsi sebagai input element. Sensor ultrasonic akan memancarkan sinyal ke permukaan air, dan permukaan air akan memantulkan sinyalnya. Dan sensor penerima akan menerima sinyal dari pantulan tersebut. Yang nantinya sinyal itu akan dioper ke ADC. Sensor ini dipasang pada satu ujung pipa, dan ujung pipa yang lain berada didalam air. Sehingga saat sensor memancarkan sinyal, tidak banyak gangguan dari
- 6. luar. Dan air yang masuk ke dalam pipa juga tidak mengalami gangguan, baik berupa aliran gelombang air (riak) ataupun angin yang akan menyebabkan air bergerak-gerak. 3. ADC (Analog to Digital Converter) ADC juga sebagai input element bersama sensor ultrasonic. ADC berfungsi sebagai converter, mengubah data analog ke data digital. Dari data hasil pembacaan sensor ultrasonic,yang datanya masih berupa data analog, diubah ke data digital 8 bit. Yang nantinya akan diolah oleh mikrokontroler, selanjutnya akan dibandingkan dengan data yang diberikan oleh user (data default). 4. Mikrokontroler Mikrokontroler bekerja sebagai komparator, yang akan membandingkan data dari sensor ultrasonic sebagai masukan dengan data default yang telah dimasukkan oleh user sebagai data pembandingnya. Hasil dari pembandingan ini, akan menyebabkan driver motor bekerja. Sehingga akan menggerakkan pintu air, apakah pintu membuka atau pintu menutup. Mikrokontroler juga bekerja sebagai control utama dari sistem, yang akan mengendalikan seluruh peralatan yang ada. Mikrokontroler akan mengendalikan motor, yang nantinya akan menggerakkan pintu air, dan juga akan mengendalikan tampilan pada LCD. 5. LCD LCD berfungsi sebagai penampil, yang akan menampilkan default data yang telah dimasukkan user, serta menampilkan ketinggian air yang terbaca oleh sensor ultrasonic. Sehingga bisa dibaca oleh operator maupun user. LCD ini berfungsi sebagai salah satu output dari system. Yang hanya menapilkan data hasil pembacaan dan hasil pengolahan dari mikrokontroler. 6. Driver Motor Driver ini berfungsi sebagai penghubung antara mikrokontroler dengan pintu air bendungan. Driver ini difungsikan sebagai penggerak pintu air. yang di-control oleh mikrokontroler.
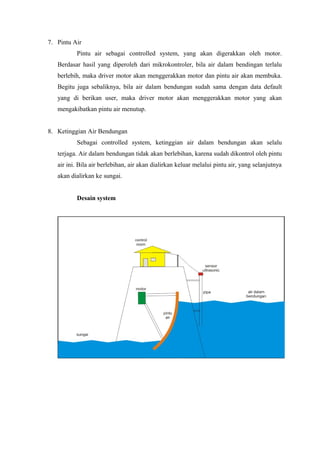
- 7. 7. Pintu Air Pintu air sebagai controlled system, yang akan digerakkan oleh motor. Berdasar hasil yang diperoleh dari mikrokontroler, bila air dalam bendingan terlalu berlebih, maka driver motor akan menggerakkan motor dan pintu air akan membuka. Begitu juga sebaliknya, bila air dalam bendungan sudah sama dengan data default yang di berikan user, maka driver motor akan menggerakkan motor yang akan mengakibatkan pintu air menutup. 8. Ketinggian Air Bendungan Sebagai controlled system, ketinggian air dalam bendungan akan selalu terjaga. Air dalam bendungan tidak akan berlebihan, karena sudah dikontrol oleh pintu air ini. Bila air berlebihan, air akan dialirkan keluar melalui pintu air, yang selanjutnya akan dialirkan ke sungai. Desain system
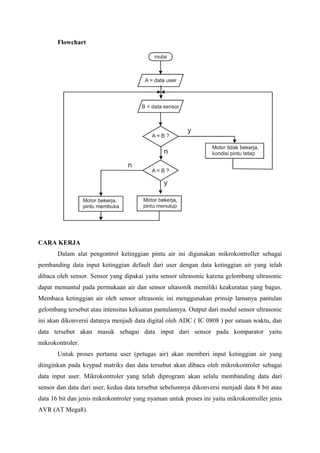
- 8. Flowchart CARA KERJA Dalam alat pengontrol ketinggian pintu air ini digunakan mikrokontroller sebagai pembanding data input ketinggian default dari user dengan data ketinggian air yang telah dibaca oleh sensor. Sensor yang dipakai yaitu sensor ultrasonic karena gelombang ultrasonic dapat memantul pada permukaan air dan sensor ultasonik memiliki keakuratan yang bagus. Membaca ketinggian air oleh sensor ultrasonic ini menggunakan prinsip lamanya pantulan gelombang tersebut atau intensitas kekuatan pantulannya. Output dari modul sensor ultrasonic ini akan dikonversi datanya menjadi data digital oleh ADC ( IC 0808 ) per satuan waktu, dan data tersebut akan masuk sebagai data input dari sensor pada komparator yaitu mikrokontroler. Untuk proses pertama user (petugas air) akan memberi input ketinggian air yang diinginkan pada keypad matriks dan data tersebut akan dibaca oleh mikrokontroler sebagai data input user. Mikrokontroler yang telah diprogram akan selalu membanding data dari sensor dan data dari user, kedua data tersebut sebelumnya dikonversi menjadi data 8 bit atau data 16 bit dan jenis mikrokontroler yang nyaman untuk proses ini yaitu mikrokontroller jenis AVR (AT Mega8).
- 9. Ada tiga kondisi output dari hasil pembandingan data masukan, • Pertama apabila kedua data masukan sama maka mikrokontroler akan memberi sinyal output atau perintah pada driver motor untuk diam atau tetap pada kondisi tersebut (motor tidak bekerja). • Kedua apabila data dari user lebih kecil data dari sensor (ketinggian air terlalu tinggi) maka mikrokontroler akan memberi sinyal output atau perintah pada driver motor untuk membuka pintu air (motor bekerja). • Ketiga apabila data user lebih besar data dari sensor (ketinggian air terlalu rendah) maka mikrokontroler akan memberi sinyal output atau perintah pada driver motor untuk menutup pintu air (motor bekerja). Setiap instruksi atau pembandingan data ini dilakukan terus-menerus setiap satuan waktu (contoh per sepuluh detik) sehingga apabila motor sedang bekerja (membuka atau menutup) dan ketinggian air sudah kembali ke ketinggian yang diinginkan maka dengan segera pintu air akan mempertahankan kondisi tersebut hingga perubahan selanjutnya. Output atau sinyal dari mikrokontroler ini akan diterima oleh driver motor. Data digital dari mikrokontroller ini masih lemah dan fungsi dari driver motor ini untuk menguatkan atau menggerakkan motor gearbox yang dipasang pada pintu air. Prinsip kerja driver motor ini yaitu mengatur arah putar motor gearbox ini sehingga motor pintu air ini bisa berfungsi untuk membuka dan menutup pintu air ini dengan mudah. C. HASIL DAN ANALISA Mikrokontroler (Sistem Kendali) dan Sensor Ultrasonic Yang Terpadu Suatu peralatan yang mengambil data di lapangan (lokasi) , dan untuk selanjutanya akan mengendalikan dan memonitor kegiatan. Peralatan inilah yang akan menentukan setiap langkah yang akan dilakukan. Dalam sebuah mikrokontroler telah dimasukkan program maupun algoritma yang akan menjadi penentu kebijakan langkah yang akan diambil secara real time. Penentuan kebijakan ini menurut situasi dan kondisi tertentu yang mungkin akan terjadi dan sebisa mungkin telah diantisipasi sebelumnya. Hubungan antara Mesin dan Manusia Dalam sistem irigasi terpadu ini, LCD digunakan operator untuk membaca nilai ketinggian air (status) dan keypad matrik digunakan untuk memasukkan nilai baru pada
- 10. sistem irigasi terpadu. Pemasukan nilai baru ketinggian air didasarkan pada situasi dan kondisi cuaca maupun lingkungan setempat. Sedangkan pemantauan ketinggian air dapat dilakukan secara berkala maupun real time. Secara langsung atau datang ke lokasi maupun secara remote atau jarak jauh. Pengambilan keputusan dalam penentuan ketinggian air harus melibatkan parameter – parameter yang terkait secara langsung maupun tidak langsung agar tidak merugikan satu pihak atau beberapa pihak. Hal-hal diatas juga menyesuaikan dengan software yang digunakan dalam sistem untuk membangun tampilan dan mengorganisir data. Kontrol Penyaluran Dalam pengontrolan penyaluran air maka terdapat dua macam cara pengontrolan dalam sistem irigasi terpadu. Dalam aplikasi untuk saluran dan rencana pemompaan dapat dilakukan dengan dua cara: Di dalam kantor, petugas atau operator akan : • Memonitor lokasi lahan yang direncanakan • Mampu merubah target kedalaman, tekanan, aliran dsb. Sedangkan di lapangan, mikrokontroler akan melakukan pengendalian secara aktual dan secara otomatis. Secara real time berdasar data ketinggian air saat itu juga dibandingkan dengan data input oleh operator/user yang telah dimasukkan sebelumnya. Peralatan yang ada di lapangan terus bekerja secara otomatis sekalipun hubungan komunikasi terputus antara kantor dengan lokasi bendungan. Sistem kerja ini akan lebih mudah dalam pengelolaan dan pemantauannya. Pengawasan dan pengumpulan data 1. Pengukuran Aliran Untuk pengukuran aliran, maka parameter-parameter yang akan diukur sebagai berikut: • Pengukuran debit aliran(volume/waktu) • Pengukuran per satuan volume • Pengukuran suatu volume air yang melalui titik tertentu. 2. Pengendalian Aliran
- 11. Dari data-data yang didapatkan dari pengukuran aliran maka dapat dilakukan pengendalian aliran. Dalam hal ini, maka akan dilakukan berbagai macam pengendalian, antara lain: • Pengendalian debit aliran (sebagai kebalikan dari pengendalian muka/ketinggian air). • Debit keluaran yang diinginkan diketahui, yaitu debit aliran sasaran. • Pengontrol Hulu (Upstream) merupakan suatu bentuk pengontrol saluran (manual atau otomatis) yang berfungsi sebagai bangunan pengendali yang mempertahankan ketinggian muka air di bagian hulu (upstream) konstan/tetap. • Pengontrol Hilir (Downstream) merupakan suatu bentuk pengontrol saluran (manual atau otomatis) yang berfungsi sebagai bangunan pengendali yang menjaga ketinggian muka air di bagian hilir (downstream) konstan/tetap. Sebagai hasil dari sistem irigasi terpadu yang menggunakan bendungan otomatis ini akan terwujud pelayanan penyaluran air yang lebih baik dan lebih akurat dalam penanganan serta cepat dan responsive terhadap kondisi cuaca maupun lingkungan sekitar. Dalam pelayanan penyaluran air terdapat berbagai komponen penyaluran air. Antara lain: • Keadilan (Equity) Dalam penyaluran air perlu diperhatikan apakah semua pengguna (konsumen) menerima jumlah yang sama atau tidak. Kalau tidak apa yang menyebabkan perbedaan jumlah penerimaan air. • Kepastian (Ketepatan Waktu & Jumlah) Dalam suatu sistem pelayanan diperlukan kepastian akan adanya ketersediaan air. Termasuk parameter tanggal dan waktu penyaluran air, debit aliran serta volumenya. • Debit aliran Perlu diperhatikan juga apakah debit aliran selalu sama tiap waktu penyaluran. Serta kemungkinan perubahan debit diubah selama waktu penyalauran. • Durasi Dalam sistem irigasi ini perlu diperhatikan juga mengenai masalah waktu atau durasi kerja siste,. Dan apakah dalam pelaksanaannya irigasi dapat dihentikan kapanpun atau hanya waktu- waktu tertentu saja.. • Schedule Penyaluran Kemudian jadwal penyaluran dalam sistem irigasi ini dapat dibagi 3 yaitu
- 12. o Rotasi • Suatu penyaluran hanya dapat dibuat untuk satu orang sekali dalam suatu waktu. • Umumnya, ada jadwal waktu seorang per 10 harian atau lebih. • Biasanya, debit aliran dan durasinya tetap (fixed). o Diatur • Seseorang mengajukan permintaan penyaluran air pada tanggal dan waktu yang ditentukan • Seseorang dapat menentukan, sesuai aturan yang disepakati, berapa banyak debit aliran dan durasi yang diinginkan. o Sesuai Kebutuhan • Air dapat diperoleh oleh pengguna tanpa harus memberitahu siapapun. • Ini adalah seperti yang kita punya di kota (air PAM). Mungkin ada keterbatasan debit aliran, tetapi tidak ada pembatasan di dalam frekuensi atau durasinya. Berbagai parameter diataslah yang memerlukan perhatian dalam penyusunan sistem irigasi ini. Suatu sistem yang baik dapat memenuhi sebanyak mungkin parameter – parameter diatas. Disinilah algoritma dalam mikrokontroler serta operator yang berperan penting dalam pengambilan keputusan dalam suatu keadaan. Baik secara berkala maupun real time. D. KEMUNGKINAN PENINGKATAN SYSTEM Untuk pengembangan system irigasi terpadu ini dapat ditingkatkan dalam sytem pengelolaan dan pemantauannya sehingga dapat meningkatkan efektivitas dan efisiensi baik SDA maupun SDM-nya, secara tidak langsung akan mengurangi beban anggaran pemeliharaan dan pemakaian. Untuk system pengelolaan dan pemantauan dapat dikembangkan menjadi berbagai macam metode dan alat bantu yang digunakan. Sebagai contoh dilakukan pengontrolan alat ini dengan remote atau pengendalian jarak jauh dan pemantauan hasil ketinggian air irigasi ini dari jarak jauh. Pengontrolan dengan Remote (Jarak Jauh) adalah suatu operasi atau tata kerja yang dilakukan dari jauh. Dengan modernisasi, hal ini biasa lebih dipahami melibatkan peralatan, bukan pada aksi yang dilakukan manusia di lapangan. Suatu sistim “remote” mempunyai
- 13. signal terhubung dari lapangan ke kantor pusat atau dari kantor lapangan atau kedua arah. Contoh aplikasi atau peralatan yang bisa digunakan dalam hal ini seperti dengan pengiriman data melalui gelombang RF, jaringan GSM atau CDMA (handphone), dan kabel instalasi. Pengamatan dari jarak jauh (Remote Monitoring) merupakan aktifitas satu arah. Biasanya peralatan di kantor menampilkan atau mencatat beberapa aktifitas dilapangan. Sebagai contoh, yang biasa dilakukan adalah memonitor ketinggian muka air disatu titik dari jarak jauh. Dengan adanya system bendungan otomatis ini dapat dikembangkan menjadi sebuah PLTA ( Pembangkit Listrik Tenaga Air) yang terintegrasi dalam sebuah system irigasi terpadu. Dalam hal ini pengaturan debit air pada turbin PLTA bisa mendapat pasokan yang sesuai yang diatur otomatis oleh alat irigasi otomatis ini. Gambar contoh pengembangan desain
- 14. E. KESIMPULAN Dengan penggunaan alat irigasi otomatis ini maka : • Gerbang air bisa membuka dan menutup dengan bantuan penggerak motor bertorsi tinggi. • Pengaturan gerak pintu air dapat dikontrol secara digital menggunakan mikrokontroler. • User atau operator dapat menyeting ketinggian air kapan saja sesuai kebutuhan. • Ketinggian air di bendungan akan selalu stabil sesuai dengan range ketinggian air yang telah ditentukan sebelumnya. • Pemantaun dan pengendalian ketinggian air menjadi lebih efisien. • Dapat disusun system irigasi yang terpadu dengan menggunakan beberapa bendungan otomatis disepanjang sungai. • Dari system irigasi ini dapat dikembangkan dalam hal monitoring, kontroling,dan further using. F. DAFTAR PUSTAKA http://www.watercontrol.org http://www.itrc.org http://deptan.go.id http://www.ec.gc.ca/Water/en/manage/use/e_use.htm