



![When training (C)
5
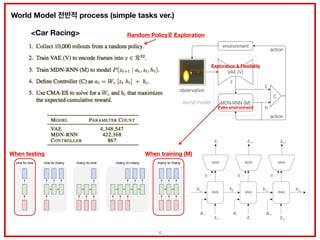
<Car Racing>
Training
Simulate
1. Environment reset ėēėė obs ė ęģĩ
2. Agentę° obsė ë°ëž random actionė ė·ĻíĻ
3. obs, reward, done, info = model.env.step(action)
4. [encoded_obs, action]ę° rnnė ėļíėžëĄ ëĪėīę°
5. íëė zę°ęģž hę°ėī ëėī
6. Total reward += reward
7. 2ëēėžëĄ ëėę° ë°ëģĩ
Optimizing
CMA-ES: cmaëžë optimizer
ëĨž ėīėĐí ė§í ėęģ ëĶŽėĶ
Cumulative rewardëĨž ėĩëę°
ëęē íë W, b ė°ūėėĪ
World Model ė ë°ė process (simple tasks ver.)](https://image.slidesharecdn.com/worldmodel-181101172007/85/World-model-5-320.jpg)






























![[paper review] ėę·ëđ - Eye in the sky & 3D human pose estimation in video with ...](https://cdn.slidesharecdn.com/ss_thumbnails/190321eyeposegyubin-190517100712-thumbnail.jpg?width=560&fit=bounds)


![ė 19í ëģīėėĶ(BOAZ) ëđ
ë°ėīí° ėŧĻížë°ėĪ - [ė ė§ 4ëëĄ ] : RAD(Reinforcement learning method for ...](https://cdn.slidesharecdn.com/ss_thumbnails/4-240209030650-b7b5323b-thumbnail.jpg?width=560&fit=bounds)
More Related Content
Similar to World model (20)
World model
- 1. What is the World Model Algorithm? Aug 29, 2018 Sooyoung Moon
- 2. 2 World Model ė ë°ė ëŠĻėë
- 3. 3 World Model ė ë°ė ëŠĻėë ë§ė― RNNííļę° ėëĪëĐī? íėĩėī ëęļī ëë RNNė ëĢėė ë ë ė ëĻ.
- 4. 4 World Model ė ë°ė process (simple tasks ver.) <Car Racing> Random PolicyëĄ Exploration Fake environment Exploration & Flexibility When training (M)When testing
- 5. When training (C) 5 <Car Racing> Training Simulate 1. Environment reset ėēėė obs ė ęģĩ 2. Agentę° obsė ë°ëž random actionė ė·ĻíĻ 3. obs, reward, done, info = model.env.step(action) 4. [encoded_obs, action]ę° rnnė ėļíėžëĄ ëĪėīę° 5. íëė zę°ęģž hę°ėī ëėī 6. Total reward += reward 7. 2ëēėžëĄ ëėę° ë°ëģĩ Optimizing CMA-ES: cmaëžë optimizer ëĨž ėīėĐí ė§í ėęģ ëĶŽėĶ Cumulative rewardëĨž ėĩëę° ëęē íë W, b ė°ūėėĪ World Model ė ë°ė process (simple tasks ver.)
- 6. 6 <VizDoom> Random PolicyëĄ Exploration Fake environment Exploration & Flexibility World Model ė ë°ė process (simple tasks ver.)
- 7. World Model ė ë°ė process (complicated tasks ver.) 1. M,C ę·ė ë ėíę° ėëëž ėžëĻ ëëĪę°ėžëĄ íëžëŊļí°ëĨž ėīęļ°í íëĪ. 2. íėë§ëĪ ė ėĨíęģ obs ė ėĨ ėīęąļ ėīėĐíėŽ Mė íļë ėīë. 3. actionė ëí reward, done ėīë° ëķëķëĪė ė ëķ ëŠĻëļë§ íęē ëĻ. ėī Mė ėĩí°ë§ėīėĶ íęēë CëĨž íļë ėīë. 4. ėīëģīëĪ ë ëģĩėĄí ėíĐėė M-C íļë ėīë íī ėžëëĪëĐī 2ëēėžëĄ ëėę°ëĪ.
- 8. Loss function Maximum likelihood loss function
- 9. 01_generate_data.py 03_generate_rnn_data.py 04_train_rnn.py Implementation ïŽles 02_train_vae.py 05_train_controller.py python 01_generate_data.py car_racing --total_episodes 2000 --start_batch 0 --time_steps 300 python 02_train_vae.py --start_batch 0 --max_batch 9 --new_model python 03_generate_rnn_data.py --start_batch 0 --max_batch 9 python 04_train_rnn.py --start_batch 0 --max_batch 9 --new_model python 05_train_controller.py car_racing --num_worker 16 --num_worker_trial 2 --num_episode 4 -- max_length 1000 --eval_steps 25 !9
- 10. VAE íėĩíėŽ latent space ë§ëë ėí MDN-RNN íėĩíėŽ sequential ė ëģī ėēëĶŽíë ėí âĶ 300 time steps âĶ âĶ âĶ âĶ . . . 200 x 10 batches VAE Weights.h5 01_generate_data.py 02_train_vae.py 03_generate_rnn_data.py ./vae/weights.h5 04_train_rnn.py MDN- RNN Weights.h5 ./rnn/weights.h5 Implementation ïŽles !10
- 11. CMA-ES CMA-ESę° ėīëĪ ęēėļė§ ė§ęīė ėžëĄ ėīíīíęļ° http://blog.otoro.net/2017/10/29/visual-evolution-strategies/ 05_train_controller.py Implementation ïŽles !11
- 12. Discussion 1. ė ėīę° ę°ííėĩėë ė°ėļëĪ. 2. ëëĶžėëę° íėĩėī ë ė ë ė ėęģ ëĶŽėž íęē―ëģīëĪ ëŠŧíė§ ėëĪ. 3. ėĪėí ė : ëĶŽėž íęē―ė ëđėļęģ ė°ė°ë ë§ė ęēė ëđíī ęĩėĨí íĻėĻė ėīëĪ. ė°ė°ë ėėēīę° ė ëĪ. 4. World modelë simulationėžëĄ ė°Ļę·žė°Ļę·ž ë°°ėī ęēė ëĶŽėž ėëëĄ ėĩí policyëĨž transfer í ė ėęļ° ëëŽļė ė ėī íėĩęģž ęē°íĐėī ëėī íĻęģžė ė§ėė ėžëĄ íėĩ í ė ėė 5. ę·ļ ë°ė ėĨė : 1. Controller modelė ėęē ë§ëĪėęļ° ëëŽļė ëģĩėĄí ėęģ ëĶŽėĶ ė°ęļ° ëģīëĪ ėëė ėžëĄ ė°ė°íęļ° ėŽėī esė. ë§Ļ ë§ė§ë§ ïŽnal cumulative rewardë§ ę°ė§ęģ optimizer ëëĶī ė ėė. 2. ESė ėĨė ėļ ëģë Ží ėŽėė GPUėė ė°ęļ° ėĒė íëėĻėīė ėĩė íë RNN ęĩŽėĄ°ëĨž ėļ ė ėęē ëëĪ. 6. ëĻė : 1. capacityę° ė íëėī ėė. ęģėė ėžëĄ continuous ë°ėīí°ę° ė ėĨëęļ° ëëŽļė 2. RNN ė°ęļ° ëëŽļė ėę° ė§ë ėëĄ ėíė§ë catastrophic forgetting ëŽļė ëĨž íīęē°í ė ėė. âĒ solution: small MDN-RNNė íŽęē ë§ëĪęą°ë external memory moduleė ėļ ė ėėęđ ëą 7. ėėžëĄ: 1. ëļë ėīíŽėėė ė ėĐę°ëĨíė§ ėēīíŽíīëģīëĐī ėĒė ęē 2. ėīëĪ taskė ė°ëĐī ėĒėė§? !12