VPPC 2013, Modeling for Control and Optimal Design of a Power Steering Pump and an Air Conditioning Compressor used in Heavy Duty Trucks
1 like639 views

This paper presents the influence on fuel consumption of two auxiliaries for two different topologies.







![Introduction Modeling of auxiliaries units Conclusions
Optimal Design on Hybrid Vehicles
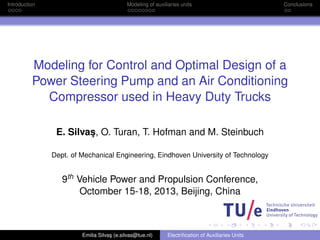
Motivation
Literature findings on removed auxiliaries:
6
5
4
3
2
1
0
Percentage change in fuel economy [%]
All auxiliaries
removed
PSP
removed
COF
removed
ACC
removed
ABC
removed
ALT
removed
T. Hendricks and M. O0Keefe.Heavy vehicle auxiliary load electrification for the essential power system
program: Benefits, tradeoffs, and remaining challenges.In SAE Tehnical Paper Series, 2002.
Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units](https://image.slidesharecdn.com/presentationvppc2013-141028045352-conversion-gate02/85/VPPC-2013-Modeling-for-Control-and-Optimal-Design-of-a-Power-Steering-Pump-and-an-Air-Conditioning-Compressor-used-in-Heavy-Duty-Trucks-9-320.jpg)







![Introduction Modeling of auxiliaries units Conclusions
Power Steering Pump
PSP System
Left hand
tube for
left hand
Power Steering
Pump
Rotary Valve
Body Unit
Reservoir
Steering
Wheel
s ’üż
Steering
Angle
Steering
Gearbox and
Hydraulic Piston
Belt to
the ICE
Rack
turn
Pinion Shalft
Energy
saving
potential
Hydraulic output power
Power [-]
’üĄ ,max Pump Shaft Speed [-] Q
Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units](https://image.slidesharecdn.com/presentationvppc2013-141028045352-conversion-gate02/85/VPPC-2013-Modeling-for-Control-and-Optimal-Design-of-a-Power-Steering-Pump-and-an-Air-Conditioning-Compressor-used-in-Heavy-Duty-Trucks-17-320.jpg)
![Introduction Modeling of auxiliaries units Conclusions
Power Steering Pump
Experimental Data
1
0.8
0.6
0.4
0.2
0
-1 0 1 2 3 4
Steering Angle [rad]
Power Steering Pressure [-]
Active Steering Region
Pressure Drop Region
Passive Steering Region
Assumptions /Constraints:
s 2 [0:5; 0:5] rad is considered road disturbance,
s = 0:1 rad is the symmetry point.
PSP Model I/O:
u(t) =
s
sign(_
s)
y(t) =
Pp
Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units](https://image.slidesharecdn.com/presentationvppc2013-141028045352-conversion-gate02/85/VPPC-2013-Modeling-for-Control-and-Optimal-Design-of-a-Power-Steering-Pump-and-an-Air-Conditioning-Compressor-used-in-Heavy-Duty-Trucks-18-320.jpg)
![Introduction Modeling of auxiliaries units Conclusions
Power Steering Pump
Experimental Data
1
0.8
0.6
0.4
0.2
0
-1 0 1 2 3 4
Steering Angle [rad]
Power Steering Pressure [-]
Active Steering Region
Pressure Drop Region
Passive Steering Region
Assumptions /Constraints:
s 2 [0:5; 0:5] rad is considered road disturbance,
s = 0:1 rad is the symmetry point.
PSP Model I/O:
u(t) =
s
sign(_
s)
y(t) =
Pp
Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units](https://image.slidesharecdn.com/presentationvppc2013-141028045352-conversion-gate02/85/VPPC-2013-Modeling-for-Control-and-Optimal-Design-of-a-Power-Steering-Pump-and-an-Air-Conditioning-Compressor-used-in-Heavy-Duty-Trucks-19-320.jpg)
![Introduction Modeling of auxiliaries units Conclusions
Power Steering Pump
Experimental Data
1
0.8
0.6
0.4
0.2
0
-1 0 1 2 3 4
Steering Angle [rad]
Power Steering Pressure [-]
Active Steering Region
Pressure Drop Region
Passive Steering Region
Assumptions /Constraints:
s 2 [0:5; 0:5] rad is considered road disturbance,
s = 0:1 rad is the symmetry point.
Steering
Pump
u(t) y(t)
PSP Model I/O:
u(t) =
s
sign(_
s)
y(t) =
Pp
Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units](https://image.slidesharecdn.com/presentationvppc2013-141028045352-conversion-gate02/85/VPPC-2013-Modeling-for-Control-and-Optimal-Design-of-a-Power-Steering-Pump-and-an-Air-Conditioning-Compressor-used-in-Heavy-Duty-Trucks-20-320.jpg)
![Introduction Modeling of auxiliaries units Conclusions
Power Steering Pump
Modeling Validation
Sequential Modeling
Measurements from 8
different driving cycles
^Pp = As + B2
s + C
min() =
PNi
=1
q
(Ppi ^Ppi )2;
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
s:t: 0 C 15 -10 -8 -6 -4 -2 0 2 4 6 8 10
Steering Angle [rad]
Pressure [-]
Validation
Route: Oss - Eindhoven
Energy cons. error =
1.7%
Improvement: steering
velocity
Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units](https://image.slidesharecdn.com/presentationvppc2013-141028045352-conversion-gate02/85/VPPC-2013-Modeling-for-Control-and-Optimal-Design-of-a-Power-Steering-Pump-and-an-Air-Conditioning-Compressor-used-in-Heavy-Duty-Trucks-21-320.jpg)
![Introduction Modeling of auxiliaries units Conclusions
Power Steering Pump
Modeling Validation
Sequential Modeling
Measurements from 8
different driving cycles
^Pp = As + B2
s + C
min() =
PNi
=1
q
(Ppi ^Ppi )2;
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
s:t: 0 C 15 -10 -8 -6 -4 -2 0 2 4 6 8 10
Steering Angle [rad]
Pressure [-]
Validation
Route: Oss - Eindhoven
Energy cons. error =
1.7%
Improvement: steering
velocity
Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units](https://image.slidesharecdn.com/presentationvppc2013-141028045352-conversion-gate02/85/VPPC-2013-Modeling-for-Control-and-Optimal-Design-of-a-Power-Steering-Pump-and-an-Air-Conditioning-Compressor-used-in-Heavy-Duty-Trucks-22-320.jpg)


![Introduction Modeling of auxiliaries units Conclusions
Air Conditioning Compressor
Modeling
u(t) Evaporator y(t)
Cooling functionality is carried
out by the evaporator:
u(t) =
2
664
m_ a
Rh
Ta
Tc
3
775
y(t) =
2
4
Te
Pc
c
3
5
Depending on the compressor operation:
Two modes defined 8 Te 2 [Te;min; Te;max]
m1 ! (C = 1) ^ T_e = Ql+QaQe
Ce
;
m2 ! (C = 0) ^ T_e = Qa
Ce
;
Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units](https://image.slidesharecdn.com/presentationvppc2013-141028045352-conversion-gate02/85/VPPC-2013-Modeling-for-Control-and-Optimal-Design-of-a-Power-Steering-Pump-and-an-Air-Conditioning-Compressor-used-in-Heavy-Duty-Trucks-25-320.jpg)
![Introduction Modeling of auxiliaries units Conclusions
Air Conditioning Compressor
Comparison with literature findings:
6
5
4
3
2
1
0
Percentage change in fuel economy [%]
All auxiliaries
removed
PSP
removed
ACC
removed
COF
removed
Payload 50%
Study case from literature
ALT
removed
ABC
removed
T. Hendricks and M. O0Keefe.Heavy vehicle auxiliary load electrification for the essential power system
program: Benefits, tradeoffs, and remaining challenges.In SAE Tehnical Paper Series, 2002.
Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units](https://image.slidesharecdn.com/presentationvppc2013-141028045352-conversion-gate02/85/VPPC-2013-Modeling-for-Control-and-Optimal-Design-of-a-Power-Steering-Pump-and-an-Air-Conditioning-Compressor-used-in-Heavy-Duty-Trucks-26-320.jpg)
































More Related Content
Similar to VPPC 2013, Modeling for Control and Optimal Design of a Power Steering Pump and an Air Conditioning Compressor used in Heavy Duty Trucks (20)
VPPC 2013, Modeling for Control and Optimal Design of a Power Steering Pump and an Air Conditioning Compressor used in Heavy Duty Trucks
- 1. Introduction Modeling of auxiliaries units Conclusions Modeling for Control and Optimal Design of a Power Steering Pump and an Air Conditioning Compressor used in Heavy Duty Trucks E. Silva┬Ės, O. Turan, T. Hofman and M. Steinbuch Dept. of Mechanical Engineering, Eindhoven University of Technology 9th Vehicle Power and Propulsion Conference, Octomber 15-18, 2013, Beijing, China Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 2. Introduction Modeling of auxiliaries units Conclusions Optimal Design on Hybrid Vehicles Motivation How can the fuel consumption be reduced in future hybrid trucks? "Belt driven auxiliary units can consume up to 15% of the total power for a truck and up to 25% for a transit bus..." Auxiliary Units Power Steering Pump (PSP) Water Pump (WAP) Air Brake Compressor (ABC) Engine Cooling Fan (ECF) Alternator (ALT) Air Cond. Compressor (ACC) Starter Motor (STM) Oil Pump (OLP) Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 3. Introduction Modeling of auxiliaries units Conclusions Optimal Design on Hybrid Vehicles Motivation How can the fuel consumption be reduced in future hybrid trucks? "Belt driven auxiliary units can consume up to 15% of the total power for a truck and up to 25% for a transit bus..." Auxiliary Units Power Steering Pump (PSP) Water Pump (WAP) Air Brake Compressor (ABC) Engine Cooling Fan (ECF) Alternator (ALT) Air Cond. Compressor (ACC) Starter Motor (STM) Oil Pump (OLP) Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 4. Introduction Modeling of auxiliaries units Conclusions Optimal Design on Hybrid Vehicles Motivation How can the fuel consumption be reduced in future hybrid trucks? "Belt driven auxiliary units can consume up to 15% of the total power for a truck and up to 25% for a transit bus..." Auxiliary Units Power Steering Pump (PSP) Water Pump (WAP) Air Brake Compressor (ABC) Engine Cooling Fan (ECF) Alternator (ALT) Air Cond. Compressor (ACC) Starter Motor (STM) Oil Pump (OLP) Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 5. Introduction Modeling of auxiliaries units Conclusions Optimal Design on Hybrid Vehicles Motivation How can the fuel consumption be reduced in future hybrid trucks? "Belt driven auxiliary units can consume up to 15% of the total power for a truck and up to 25% for a transit bus..." Auxiliary Units Power Steering Pump (PSP) Water Pump (WAP) Air Brake Compressor (ABC) Engine Cooling Fan (ECF) Alternator (ALT) Air Cond. Compressor (ACC) Starter Motor (STM) Oil Pump (OLP) Engine Cooling Fan Water Pump Air Brake Compressor Air Brake Compressor Steering Pump Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 6. Introduction Modeling of auxiliaries units Conclusions Optimal Design on Hybrid Vehicles Motivation How can the fuel consumption be reduced in future hybrid trucks? "Belt driven auxiliary units can consume up to 15% of the total power for a truck and up to 25% for a transit bus..." Auxiliary Units Air Conditioning Compressor Power Steering Pump (PSP) Water Pump (WAP) Air Brake Compressor (ABC) Engine Cooling Fan (ECF) Alternator (ALT) Air Cond. Compressor (ACC) Starter Motor (STM) Oil Pump (OLP) Fuel Pump Starter Motor Alternator Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 7. Introduction Modeling of auxiliaries units Conclusions Optimal Design on Hybrid Vehicles Motivation Conventional (non-hybrid) vehicles topology: Fuel tank Engine Transmission Final drive + wheels Mechanical link Hybrid Electric Truck (Parallel Topology): Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 8. Introduction Modeling of auxiliaries units Conclusions Optimal Design on Hybrid Vehicles Motivation Conventional (non-hybrid) vehicles topology: Fuel tank Engine Transmission Final drive + wheels Mechanical link Hybrid Electric Truck (Parallel Topology): BAT INV ICE EM FTA TRA WAP FDW COF OLP ALT ABC ACC PSP STM Mechanical Electrical Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 9. Introduction Modeling of auxiliaries units Conclusions Optimal Design on Hybrid Vehicles Motivation Literature findings on removed auxiliaries: 6 5 4 3 2 1 0 Percentage change in fuel economy [%] All auxiliaries removed PSP removed COF removed ACC removed ABC removed ALT removed T. Hendricks and M. O0Keefe.Heavy vehicle auxiliary load electrification for the essential power system program: Benefits, tradeoffs, and remaining challenges.In SAE Tehnical Paper Series, 2002. Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 10. Introduction Modeling of auxiliaries units Conclusions Optimal Design on Hybrid Vehicles Project Goal Analyse the benefits and trade-offs of electrification for Steering Pump and Air Conditioning Compressor by Modeling and validation of auxiliaries units, Validation of the fuel consumption values with literature, Analysis of possible topologies/ controllers. BAT INV ICE EM FTA TRA WAP FDW COF OLP ALT ABC ACC PSP STM Mechanical Electrical Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 11. Introduction Modeling of auxiliaries units Conclusions Optimal Design on Hybrid Vehicles Project Goal Analyse the benefits and trade-offs of electrification for Steering Pump and Air Conditioning Compressor by Modeling and validation of auxiliaries units, Validation of the fuel consumption values with literature, Analysis of possible topologies/ controllers. BAT INV ICE EM FTA TRA WAP FDW COF OLP ALT ABC ACC PSP STM Mechanical Electrical Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 12. Introduction Modeling of auxiliaries units Conclusions Optimal Design on Hybrid Vehicles Project Goal Analyse the benefits and trade-offs of electrification for Steering Pump and Air Conditioning Compressor by Modeling and validation of auxiliaries units, Validation of the fuel consumption values with literature, Analysis of possible topologies/ controllers. BAT INV ICE EM FTA TRA WAP FDW COF OLP ALT ABC ACC PSP STM Mechanical Electrical Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 13. Introduction Modeling of auxiliaries units Conclusions Optimal Design on Hybrid Vehicles Project Goal Analyse the benefits and trade-offs of electrification for Steering Pump and Air Conditioning Compressor by Modeling and validation of auxiliaries units, Validation of the fuel consumption values with literature, Analysis of possible topologies/ controllers. BAT INV ICE EM FTA TRA WAP FDW COF OLP ALT ABC ACC PSP STM Mechanical Electrical Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 14. Introduction Modeling of auxiliaries units Conclusions Power Steering Pump PSP System Steering Wheel s ’üż Steering Angle Pinion Shalft Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 15. Introduction Modeling of auxiliaries units Conclusions Power Steering Pump PSP System Steering Wheel s ’üż Steering Angle Pinion Shalft Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 16. Introduction Modeling of auxiliaries units Conclusions Power Steering Pump PSP System Left hand tube for left hand Power Steering Pump Rotary Valve Body Unit Reservoir Steering Wheel s ’üż Steering Angle Steering Gearbox and Hydraulic Piston Belt to the ICE Rack turn Pinion Shalft Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 17. Introduction Modeling of auxiliaries units Conclusions Power Steering Pump PSP System Left hand tube for left hand Power Steering Pump Rotary Valve Body Unit Reservoir Steering Wheel s ’üż Steering Angle Steering Gearbox and Hydraulic Piston Belt to the ICE Rack turn Pinion Shalft Energy saving potential Hydraulic output power Power [-] ’üĄ ,max Pump Shaft Speed [-] Q Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 18. Introduction Modeling of auxiliaries units Conclusions Power Steering Pump Experimental Data 1 0.8 0.6 0.4 0.2 0 -1 0 1 2 3 4 Steering Angle [rad] Power Steering Pressure [-] Active Steering Region Pressure Drop Region Passive Steering Region Assumptions /Constraints: s 2 [0:5; 0:5] rad is considered road disturbance, s = 0:1 rad is the symmetry point. PSP Model I/O: u(t) = s sign(_ s) y(t) = Pp Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 19. Introduction Modeling of auxiliaries units Conclusions Power Steering Pump Experimental Data 1 0.8 0.6 0.4 0.2 0 -1 0 1 2 3 4 Steering Angle [rad] Power Steering Pressure [-] Active Steering Region Pressure Drop Region Passive Steering Region Assumptions /Constraints: s 2 [0:5; 0:5] rad is considered road disturbance, s = 0:1 rad is the symmetry point. PSP Model I/O: u(t) = s sign(_ s) y(t) = Pp Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 20. Introduction Modeling of auxiliaries units Conclusions Power Steering Pump Experimental Data 1 0.8 0.6 0.4 0.2 0 -1 0 1 2 3 4 Steering Angle [rad] Power Steering Pressure [-] Active Steering Region Pressure Drop Region Passive Steering Region Assumptions /Constraints: s 2 [0:5; 0:5] rad is considered road disturbance, s = 0:1 rad is the symmetry point. Steering Pump u(t) y(t) PSP Model I/O: u(t) = s sign(_ s) y(t) = Pp Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 21. Introduction Modeling of auxiliaries units Conclusions Power Steering Pump Modeling Validation Sequential Modeling Measurements from 8 different driving cycles ^Pp = As + B2 s + C min() = PNi =1 q (Ppi ^Ppi )2; 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 s:t: 0 C 15 -10 -8 -6 -4 -2 0 2 4 6 8 10 Steering Angle [rad] Pressure [-] Validation Route: Oss - Eindhoven Energy cons. error = 1.7% Improvement: steering velocity Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 22. Introduction Modeling of auxiliaries units Conclusions Power Steering Pump Modeling Validation Sequential Modeling Measurements from 8 different driving cycles ^Pp = As + B2 s + C min() = PNi =1 q (Ppi ^Ppi )2; 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 s:t: 0 C 15 -10 -8 -6 -4 -2 0 2 4 6 8 10 Steering Angle [rad] Pressure [-] Validation Route: Oss - Eindhoven Energy cons. error = 1.7% Improvement: steering velocity Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 23. Introduction Modeling of auxiliaries units Conclusions Air Conditioning Compressor ACC System Compressor Condenser Evaporator Receiver+Valve Cab Interior Low Pressure Vapour Heater core Warm Ambient Air Cold Air Conditioned Air Low Pressure Liquid High Pressure Vapour Blower Cooling fan Ambient Air Hot Air High Pressure Liquid Cooling functionality is carried out by the evaporator: u(t) = 2 664 m_ a Rh Ta Tc 3 775 y(t) = 2 4 Te Pc c 3 5 Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 24. Introduction Modeling of auxiliaries units Conclusions Air Conditioning Compressor ACC System Compressor Condenser Evaporator Receiver+Valve Cab Interior Low Pressure Vapour Heater core Warm Ambient Air Cold Air Conditioned Air Low Pressure Liquid High Pressure Vapour Blower Cooling fan Ambient Air Hot Air High Pressure Liquid u(t) Evaporator y(t) Cooling functionality is carried out by the evaporator: u(t) = 2 664 m_ a Rh Ta Tc 3 775 y(t) = 2 4 Te Pc c 3 5 Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 25. Introduction Modeling of auxiliaries units Conclusions Air Conditioning Compressor Modeling u(t) Evaporator y(t) Cooling functionality is carried out by the evaporator: u(t) = 2 664 m_ a Rh Ta Tc 3 775 y(t) = 2 4 Te Pc c 3 5 Depending on the compressor operation: Two modes defined 8 Te 2 [Te;min; Te;max] m1 ! (C = 1) ^ T_e = Ql+QaQe Ce ; m2 ! (C = 0) ^ T_e = Qa Ce ; Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 26. Introduction Modeling of auxiliaries units Conclusions Air Conditioning Compressor Comparison with literature findings: 6 5 4 3 2 1 0 Percentage change in fuel economy [%] All auxiliaries removed PSP removed ACC removed COF removed Payload 50% Study case from literature ALT removed ABC removed T. Hendricks and M. O0Keefe.Heavy vehicle auxiliary load electrification for the essential power system program: Benefits, tradeoffs, and remaining challenges.In SAE Tehnical Paper Series, 2002. Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 27. Introduction Modeling of auxiliaries units Conclusions PSP Control Algorithm Variable Flow Control Variable flow rate control Steering system s ’üż h T p P ’üĄ Q e P r P For Qh 2 f10; 12; 14; 16g : Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 28. Introduction Modeling of auxiliaries units Conclusions Conclusions Summary Electrified auxiliaries enable Start/Stop and Zero Emission Driving; The electrification of the PSP and of the ACC brings significant improvements in fuel consumption; Variable flow control decreases the fuel consumption of the PSP with approx. 50% Future work Develop improved control algorithms at unit level; Synthesize a supervisory optimal controller for the auxiliaries (integrated with the topology/techonology selection). Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 29. Introduction Modeling of auxiliaries units Conclusions Conclusions Summary Electrified auxiliaries enable Start/Stop and Zero Emission Driving; The electrification of the PSP and of the ACC brings significant improvements in fuel consumption; Variable flow control decreases the fuel consumption of the PSP with approx. 50% Future work Develop improved control algorithms at unit level; Synthesize a supervisory optimal controller for the auxiliaries (integrated with the topology/techonology selection). Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units
- 30. Introduction Modeling of auxiliaries units Conclusions Conclusions Thank you! Emilia Silva┬Ės (e.silvas@tue.nl) Electrification of Auxiliaries Units