20171207 domain-adaptation
2 likes675 views

This document introduces a study that uses simulated data and domain adaptation techniques to efficiently train policies for robotic grasping. The study trains a neural network policy for grasping using large amounts of simulated data. It then adapts the features and visual appearance of the simulated data to match the real world domain using domain adversarial training and a GAN. In experiments, it finds that domain adaptation improves the grasping policy trained on simulated data, leading to more successful real world grasps.
![Confidential
ź╗ź¾ź╣ź┐źżźÓźĖźŃźčź¾DA in feature space
? Domain-adversarial neural net (DANN) [3]
7](https://image.slidesharecdn.com/20171207-domain-adaptation-171207114508/85/20171207-domain-adaptation-7-320.jpg)
![Confidential
ź╗ź¾ź╣ź┐źżźÓźĖźŃźčź¾References
13
[1] Bousmalis, K., Irpan, A., Wohlhart, P., Bai, Y., Kelcey, M.,
Kalakrishnan, M., ... & Levine, S. (2017). Using simulation and
domain adaptation to improve efficiency of deep robotic
grasping. arXiv preprint arXiv:1709.07857.
[2] Levine, S., Pastor, P., Krizhevsky, A., Ibarz, J., & Quillen, D.
(2016). Learning hand-eye coordination for robotic grasping with
deep learning and large-scale data collection. The International
Journal of Robotics Research, 0278364917710318.
[3] Ganin, Y., Ustinova, E., Ajakan, H., Germain, P., Larochelle, H.,
Laviolette, F., ... & Lempitsky, V. (2016). Domain-adversarial training
of neural networks. Journal of Machine Learning Research, 17(59),
1-35.](https://image.slidesharecdn.com/20171207-domain-adaptation-171207114508/85/20171207-domain-adaptation-13-320.jpg)

![[GTC 2019] Bringing Personal Robots Home: Integrating Computer Vision and Hum...](https://cdn.slidesharecdn.com/ss_thumbnails/s9360-bringingpersonalrobotshomefinalslides-190402004354-thumbnail.jpg?width=560&fit=bounds)
![šnŅ}ź╔źĻźųź¾Īóźšźļź╣ź┐ź├ź»AIķ_░kąg [MOBILITY:dev]](https://cdn.slidesharecdn.com/ss_thumbnails/20191031mobilitydevkuzuoka-191031073741-thumbnail.jpg?width=560&fit=bounds)



























More Related Content
Similar to 20171207 domain-adaptation (20)
More from Taku Yoshioka (8)






Recently uploaded (20)










20171207 domain-adaptation
- 2. Confidential ź╗ź¾ź╣ź┐źżźÓźĖźŃźčź¾About me ? Name: Taku Yoshioka ? Interests: Bayesian inference, machine learning, deep learning and robotics ? Robot and ROS: 9 months ? Affiliation: SenseTime Japan Īņ Computer vision and deep learning Īņ https://www.sensetime.jp Īņ https://blog.sensetime.jp (lunch blog) Īņ Kyoto, Tokyo Īņ We are hiring! 2
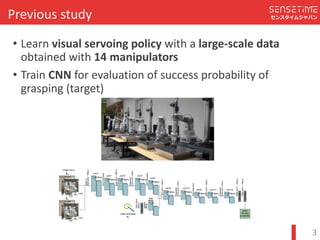
- 3. Confidential ź╗ź¾ź╣ź┐źżźÓźĖźŃźčź¾Previous study 3 ? Learn visual servoing policy with a large-scale data obtained with 14 manipulators ? Train CNN for evaluation of success probability of grasping (target)
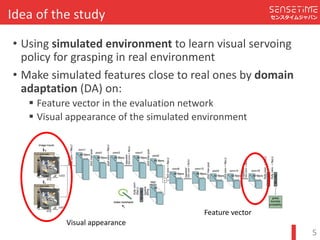
- 5. Confidential ź╗ź¾ź╣ź┐źżźÓźĖźŃźčź¾Idea of the study ? Using simulated environment to learn visual servoing policy for grasping in real environment ? Make simulated features close to real ones by domain adaptation (DA) on: Īņ Feature vector in the evaluation network Īņ Visual appearance of the simulated environment 5 Feature vector Visual appearance
- 6. Confidential ź╗ź¾ź╣ź┐źżźÓźĖźŃźčź¾ ? Fitting distributions based on random samples, without likelihood function (implicit learning) ? Adversarial training (e.g., GAN for generative model) 6 Fitting distributions
- 7. Confidential ź╗ź¾ź╣ź┐źżźÓźĖźŃźčź¾DA in feature space ? Domain-adversarial neural net (DANN) [3] 7
- 10. Confidential ź╗ź¾ź╣ź┐źżźÓźĖźŃźčź¾Experiment 10 ? 8M simulated data + 94K?9.4M real data ? Sim-only, Real-only, Sim + Real ? Na?ve mix, domain-specific batch normalization (DBN) + visual randomization, DBN + DANN, DBN + DANN + visual randomization, GraspGAN
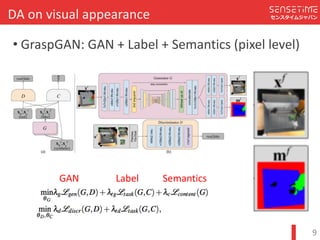
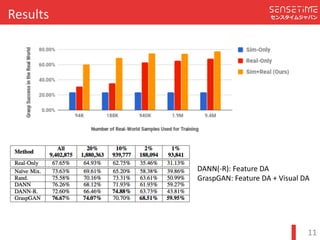
- 11. Confidential ź╗ź¾ź╣ź┐źżźÓźĖźŃźčź¾Results 11 DANN(-R): Feature DA GraspGAN: Feature DA + Visual DA
- 12. Confidential ź╗ź¾ź╣ź┐źżźÓźĖźŃźčź¾ 12 ? Findings: Īņ Efficient training by simulated data Īņ Improvement of policy by visual appearance DA ? Future study Īņ Consider physical discrepancy Īņ Other sensor (e.g., depth) Īņ Further improvement of success rate of the task
- 13. Confidential ź╗ź¾ź╣ź┐źżźÓźĖźŃźčź¾References 13 [1] Bousmalis, K., Irpan, A., Wohlhart, P., Bai, Y., Kelcey, M., Kalakrishnan, M., ... & Levine, S. (2017). Using simulation and domain adaptation to improve efficiency of deep robotic grasping. arXiv preprint arXiv:1709.07857. [2] Levine, S., Pastor, P., Krizhevsky, A., Ibarz, J., & Quillen, D. (2016). Learning hand-eye coordination for robotic grasping with deep learning and large-scale data collection. The International Journal of Robotics Research, 0278364917710318. [3] Ganin, Y., Ustinova, E., Ajakan, H., Germain, P., Larochelle, H., Laviolette, F., ... & Lempitsky, V. (2016). Domain-adversarial training of neural networks. Journal of Machine Learning Research, 17(59), 1-35.