3. relutance and hysteresis motor
Download as doc, pdf2 likes578 views
Electrical Drive lecture 1c notes for HD in Electrical Engineering
1 of 4
Downloaded 15 times


Ad
Recommended
FRACTIONAL HORSE POWER MOTORS
FRACTIONAL HORSE POWER MOTORSsavaliya753
╠²
This document summarizes several types of fractional horsepower motors: permanent magnet synchronous motors, reluctance motors, hysteresis motors, stepper motors, and servo motors. It provides details on their construction, operation principles, qualities, applications, and torque-speed characteristics. The key points are that permanent magnet synchronous motors can operate noiselessly and with high efficiency, reluctance motors have a simple low-cost structure, hysteresis motors develop constant torque and synchronize under any load, stepper motors have precise movement control, and servo motors provide higher torque and RPM with feedback control.Hysteresis motor
Hysteresis motorAhmed A.Hassan
╠²
This document discusses hysteresis motors. It describes the construction of hysteresis motors, which have a smooth cylinder rotor like induction motors but without windings. It explains that hysteresis motors operate based on the principle of a rotating stator flux inducing poles in the rotor that lag behind, causing it to accelerate to synchronous speed. The document also outlines the torque-speed characteristic of hysteresis motors, noting they can develop constant hysteresis torque independent of speed and frequency in their normal operating range.Hysterisis Motor
Hysterisis Motorjams006
╠²
The document discusses the hysteresis motor, including its definition, construction, operation, torque characteristics, mathematical analysis, advantages, disadvantages, and applications. A hysteresis motor is a synchronous motor without DC excitation that operates on single or three-phase power. It produces torque through hysteresis and eddy currents induced in the aluminum rotor by the rotating magnetic field of the stator windings. Applications include air conditioners and sound equipment due to its noiseless operation.Chapter 5 - DC-AC Conversion.pdf
Chapter 5 - DC-AC Conversion.pdfbenson215
╠²
This document discusses DC to AC conversion using inverters. It describes various inverter topologies including single phase half bridge and full bridge inverters as well as three phase full bridge inverters. It discusses modulation techniques such as sinusoidal pulse width modulation to generate sinusoidal AC outputs. Examples of applications like motor drives and solar power generation are provided.Chapter 0 - Introduction.pdf
Chapter 0 - Introduction.pdfbenson215
╠²
This document introduces an advanced power electronics course. It discusses the lecturer's background and qualifications. It outlines some ground rules for students, including submitting assignments on time, maintaining academic integrity, and being respectful. It then provides a general overview of the course, defining power electronics and discussing some key applications like power supplies, inverters, and motor drives. It also introduces some important power electronic components like capacitors, inductors, diodes, and active switching devices.Chapter 1 - PWM DC-DC Converter.pdf
Chapter 1 - PWM DC-DC Converter.pdfbenson215
╠²
This document provides an overview of pulse-width modulated (PWM) DC/DC converters. It discusses typical applications, topologies including non-isolated converters like buck, boost and buck-boost converters. The principles of DC/DC converters like conversion ratio and voltage/current waveforms are introduced. Modes of operation for buck converters in continuous and discontinuous mode are examined. Component ratings for voltage and current are also covered.Chapter 2 - Isolated DC-DC Converter.pdf
Chapter 2 - Isolated DC-DC Converter.pdfbenson215
╠²
This document summarizes different types of isolated DC/DC converters. It discusses flyback converters, which are derived from buck-boost converters by adding a coupled inductor. Flyback converters can operate in continuous or discontinuous mode. Phase-shift full-bridge converters are suitable for high power applications. They consist of a full-bridge inverter and rectifier, with legs switched alternately at different phases to regulate output voltage. The document also reviews transformer fundamentals and voltage conversion ratios for different isolated converter types.Chapter 3 - Resonant-mode DC-DC Converter.pdf
Chapter 3 - Resonant-mode DC-DC Converter.pdfbenson215
╠²
This chapter discusses resonant DC/DC converters. Hard-switching converters experience high switching losses which reduce efficiency. Resonant converters reduce switching losses by forcing zero-current or zero-voltage switching through resonant circuits. This is accomplished by adding inductors and capacitors to shape current and voltage waveforms. While more efficient, resonant converters have more complex circuitry than hard-switching converters.Chapter 6 - Modelling and Control of Converters.pdf
Chapter 6 - Modelling and Control of Converters.pdfbenson215
╠²
This document discusses modeling and control of power converters. It begins by explaining that converters are typically controlled with closed-loop control to maintain regulated output levels despite variations, rather than open-loop control. It then covers obtaining small-signal dynamic models of converters using state-space averaging techniques to design closed-loop controllers. As an example, it derives the small-signal model of a buck converter in continuous mode through state-space equations, averaging, linearization, and Laplace transformation to obtain a transfer function. The document provides procedures for modeling other converters and analyzing converter characteristics from the frequency-domain models.Chapter 4 - AC-DC Conversion.pdf
Chapter 4 - AC-DC Conversion.pdfbenson215
╠²
This document summarizes Chapter 4 of a textbook on AC/DC and DC/AC conversion. It discusses uncontrollable and controllable AC-DC converters, including rectifiers, power factor, and harmonics. It then covers full-wave and controlled rectifiers, thyristor triggering, and integrated power modules. The document also discusses power factor correction, harmonic distortion, and total harmonic distortion. Finally, it summarizes various power quality issues faced by utilities.Chapter 7 - EMI.pdf
Chapter 7 - EMI.pdfbenson215
╠²
This document discusses electromagnetic interference (EMI) in power electronics. It defines EMI and describes how it is generated internally in power electronic circuits and transmitted through electrical conduction, electromagnetic induction, and radiation. The document outlines international standards for EMI, sources of EMI, and methods for suppressing EMI, including EMI filters, active harmonic compensation, and proper design of circuit components.3. ac drive (misc.)
3. ac drive (misc.)benson215
╠²
(1) The document discusses AC drive systems including AC voltage controllers, cycloconverters, and PWM control.
(2) AC voltage controllers are used to control the speed of AC induction motors by varying the firing angle. Cycloconverters can generate variable frequency output from a fixed frequency input using a dual converter configuration.
(3) PWM control improves performance over simple voltage control by reducing harmonic content in the output waveform. Advanced PWM techniques like sinusoidal, trapezoidal, and stepped modulation further optimize the output waveform.2. ac drive (common inverter drive)
2. ac drive (common inverter drive)benson215
╠²
Electrical Drive lecture 4b notes for HD in Electrical Engineering1. revision on 3 phase conventional inverter
1. revision on 3 phase conventional inverterbenson215
╠²
This document discusses revisions made to a 3-phase conventional inverter. The inverter is used to convert DC power from sources like solar panels into 3-phase AC power that can be fed into the electric grid or used by electric motors. Some changes were made to the control system and components to improve the inverter's performance and efficiency.1. revision on 3 phase controlled rectifier
1. revision on 3 phase controlled rectifierbenson215
╠²
This document discusses a 3-phase controlled rectifier circuit that uses thyristors to control the rectification of a 3-phase AC input. The circuit allows controlling the DC output voltage by adjusting the firing angle of the thyristors. When the thyristors are fired earlier in their half-cycles, more voltage will be rectified and added to the DC output.2. motor drive dynamic
2. motor drive dynamicbenson215
╠²
This document discusses dimensioning a drive system, including:
1. The general steps of dimensioning including selecting the motor and frequency converter.
2. Common load types like constant torque, quadratic torque, and constant power loads.
3. How a motor's thermal loadability decreases at lower speeds for self-ventilated motors, but separate cooling allows overloading at low speeds.5. two phase servo motor
5. two phase servo motorbenson215
╠²
A 2-phase servo motor is described with 17 numbered points providing details about its construction and operation. Key details include that it uses 2 energized coils to rotate the motor shaft in either direction and has a feedback potentiometer to sense shaft position and complete a control loop.4. linear motor basics
4. linear motor basicsbenson215
╠²
1. A linear induction motor is essentially a rotating squirrel cage induction motor that has been opened out flat, producing linear force instead of rotary torque.
2. Linear motors have advantages like no moving parts, silent operation, and ease of control and installation. Applications include sliding doors, conveyors, and vehicle propulsion.
3. Linear motors require an AC power supply and speed can be controlled through phase control or feedback systems. Different linear motor designs exist including ironcore, aircore, and slotless types.2. brushless dc motors
2. brushless dc motorsbenson215
╠²
This document provides an overview of brushless DC motors. It discusses their structure, drive circuits, equivalent circuit model, and performance characteristics. Brushless DC motors have a rotor with permanent magnets and stator windings similar to AC motors. They use electronic commutation instead of brushes and commutators, making them maintenance-free. The document covers various drive circuit topologies including unipolar and bipolar drives. It also presents the dynamic and steady-state equivalent circuits and performance equations of brushless DC motors.1. servo basic
1. servo basicbenson215
╠²
This document provides an introduction to servo systems, including:
1. It defines a servo system as one that controls mechanical devices in compliance with varying position or speed target values from a command.
2. It describes three major types of control systems - open loop, semi-closed loop, and full-closed loop - and compares their features such as precision, ability to handle load fluctuations, and complexity.
3. It outlines the typical components of a servo system, including the servo motor, detector, driver, and position controller, and describes how they work together to provide position and speed feedback control of the motor.Eee3420 lecture08 rev2011
Eee3420 lecture08 rev2011benson215
╠²
This document provides an overview of sensors, actuators, and programmable logic controller (PLC) applications in industrial control. It discusses various types of common sensors such as inductive proximity, capacitive, optical, and mechanical contact sensors. It also describes actuator types including solenoids, valves, cylinders, and motors. Finally, it provides examples of how PLCs can be used with these sensors and actuators for industrial automation and control applications.Eee3420 lecture07 rev2011
Eee3420 lecture07 rev2011benson215
╠²
This document provides an overview of communication protocols and PLC communication techniques. It begins with learning objectives to understand communication protocols and PLC communication. It then introduces industrial networks and how multiple control systems like PLCs, robots, and computers must communicate to work together. It discusses various communication methods including serial, parallel, transmission rates and distances. It also covers topics like industrial network characteristics, hierarchy, response times, bandwidth, efficiency, access methods, topologies, number of devices, capabilities, message lengths, vendor support, OSI models, traditional industrial networks like DeviceNet and Profibus, and serial communication standards like RS-232.Eee3420 lecture06 rev2011
Eee3420 lecture06 rev2011benson215
╠²
This document provides an overview of sequential function charts (SFC) for process control design. It defines SFCs as a graphical programming language used to describe control sequences. The key components of SFCs are defined as steps, transitions, and actions. Various SFC structures are presented, including simple sequences, parallel sequences, and branching sequences. Implementation of SFCs using ladder logic and sequence bits is also described. An example of using SFCs to control a three-floor lift is presented to illustrate how SFCs can be applied to model sequential process control applications.Eee3420 lecture05 rev2011
Eee3420 lecture05 rev2011benson215
╠²
This document discusses designing control processes using flowchart techniques. It begins by defining the basic components of a flowchart like blocks, arrows, and decision points. It then provides examples of implementing simple sequential processes as flowcharts, including a water tank filling process. The document explains two methods for representing flowcharts in ladder logic programs using block logic or sequence bits. Finally, it presents a example of using flowcharts and high-level instructions to control the movement of a cart system.Eee3420 lecture04 rev2011
Eee3420 lecture04 rev2011benson215
╠²
This document provides an overview of an advanced PLC programming lecture for a course on industrial control. It discusses the structure and programming of Mitsubishi FX series PLCs, including details on hardware components like inputs, outputs, auxiliary relays and data registers. It also covers advanced programming techniques like special instructions, representation of operands, and data formats including bit devices, word devices, signed binary, hexadecimal, BCD, scientific notation and floating point values.Eee3420 lecture03 rev2011
Eee3420 lecture03 rev2011benson215
╠²
This document provides an overview of programmable logic controller (PLC) programming. It discusses the IEC 61131 standards for PLC programming languages including ladder logic, sequential function charts, function block diagrams, structured text, and instruction list. It also provides examples of programming basics like logic gates, latches, timers, and shift registers in ladder logic for different PLC brands like Allen-Bradley, Mitsubishi, and Omron.Eee3420 lecture02 rev2011
Eee3420 lecture02 rev2011benson215
╠²
This document provides an overview of programmable logic controllers (PLCs) and their hardware components. It discusses the basic components of a PLC including the power supply, central processing unit, input/output terminals, and indicator lights. It also describes common input and output devices used with PLCs such as sensors, actuators, and relays. The document discusses how inputs are connected to a PLC and converted to a format readable by its logic. It also describes how PLCs convert internal logic levels to external voltage levels on the outputs. Finally, it summarizes key aspects of PLC hardware and wiring.Introduction to Natural Language Processing - Stages in NLP Pipeline, Challen...
Introduction to Natural Language Processing - Stages in NLP Pipeline, Challen...resming1
╠²
Lecture delivered in 2021. This gives an introduction to Natural Language Processing. It describes the use cases of NLP in daily life. It discusses the stages in NLP Pipeline. It highlights the challenges involved covering the different levels of ambiguity that could arise. It also gives a brief note on the present scenario with the latest language models, tools and frameworks/libraries for NLP.Tesla-Stock-Analysis-and-Forecast.pptx (1).pptx
Tesla-Stock-Analysis-and-Forecast.pptx (1).pptxmoonsony54
╠²
this is data science ppt for tesla stock (linear regression)More Related Content
More from benson215 (20)
Chapter 6 - Modelling and Control of Converters.pdf
Chapter 6 - Modelling and Control of Converters.pdfbenson215
╠²
This document discusses modeling and control of power converters. It begins by explaining that converters are typically controlled with closed-loop control to maintain regulated output levels despite variations, rather than open-loop control. It then covers obtaining small-signal dynamic models of converters using state-space averaging techniques to design closed-loop controllers. As an example, it derives the small-signal model of a buck converter in continuous mode through state-space equations, averaging, linearization, and Laplace transformation to obtain a transfer function. The document provides procedures for modeling other converters and analyzing converter characteristics from the frequency-domain models.Chapter 4 - AC-DC Conversion.pdf
Chapter 4 - AC-DC Conversion.pdfbenson215
╠²
This document summarizes Chapter 4 of a textbook on AC/DC and DC/AC conversion. It discusses uncontrollable and controllable AC-DC converters, including rectifiers, power factor, and harmonics. It then covers full-wave and controlled rectifiers, thyristor triggering, and integrated power modules. The document also discusses power factor correction, harmonic distortion, and total harmonic distortion. Finally, it summarizes various power quality issues faced by utilities.Chapter 7 - EMI.pdf
Chapter 7 - EMI.pdfbenson215
╠²
This document discusses electromagnetic interference (EMI) in power electronics. It defines EMI and describes how it is generated internally in power electronic circuits and transmitted through electrical conduction, electromagnetic induction, and radiation. The document outlines international standards for EMI, sources of EMI, and methods for suppressing EMI, including EMI filters, active harmonic compensation, and proper design of circuit components.3. ac drive (misc.)
3. ac drive (misc.)benson215
╠²
(1) The document discusses AC drive systems including AC voltage controllers, cycloconverters, and PWM control.
(2) AC voltage controllers are used to control the speed of AC induction motors by varying the firing angle. Cycloconverters can generate variable frequency output from a fixed frequency input using a dual converter configuration.
(3) PWM control improves performance over simple voltage control by reducing harmonic content in the output waveform. Advanced PWM techniques like sinusoidal, trapezoidal, and stepped modulation further optimize the output waveform.2. ac drive (common inverter drive)
2. ac drive (common inverter drive)benson215
╠²
Electrical Drive lecture 4b notes for HD in Electrical Engineering1. revision on 3 phase conventional inverter
1. revision on 3 phase conventional inverterbenson215
╠²
This document discusses revisions made to a 3-phase conventional inverter. The inverter is used to convert DC power from sources like solar panels into 3-phase AC power that can be fed into the electric grid or used by electric motors. Some changes were made to the control system and components to improve the inverter's performance and efficiency.1. revision on 3 phase controlled rectifier
1. revision on 3 phase controlled rectifierbenson215
╠²
This document discusses a 3-phase controlled rectifier circuit that uses thyristors to control the rectification of a 3-phase AC input. The circuit allows controlling the DC output voltage by adjusting the firing angle of the thyristors. When the thyristors are fired earlier in their half-cycles, more voltage will be rectified and added to the DC output.2. motor drive dynamic
2. motor drive dynamicbenson215
╠²
This document discusses dimensioning a drive system, including:
1. The general steps of dimensioning including selecting the motor and frequency converter.
2. Common load types like constant torque, quadratic torque, and constant power loads.
3. How a motor's thermal loadability decreases at lower speeds for self-ventilated motors, but separate cooling allows overloading at low speeds.5. two phase servo motor
5. two phase servo motorbenson215
╠²
A 2-phase servo motor is described with 17 numbered points providing details about its construction and operation. Key details include that it uses 2 energized coils to rotate the motor shaft in either direction and has a feedback potentiometer to sense shaft position and complete a control loop.4. linear motor basics
4. linear motor basicsbenson215
╠²
1. A linear induction motor is essentially a rotating squirrel cage induction motor that has been opened out flat, producing linear force instead of rotary torque.
2. Linear motors have advantages like no moving parts, silent operation, and ease of control and installation. Applications include sliding doors, conveyors, and vehicle propulsion.
3. Linear motors require an AC power supply and speed can be controlled through phase control or feedback systems. Different linear motor designs exist including ironcore, aircore, and slotless types.2. brushless dc motors
2. brushless dc motorsbenson215
╠²
This document provides an overview of brushless DC motors. It discusses their structure, drive circuits, equivalent circuit model, and performance characteristics. Brushless DC motors have a rotor with permanent magnets and stator windings similar to AC motors. They use electronic commutation instead of brushes and commutators, making them maintenance-free. The document covers various drive circuit topologies including unipolar and bipolar drives. It also presents the dynamic and steady-state equivalent circuits and performance equations of brushless DC motors.1. servo basic
1. servo basicbenson215
╠²
This document provides an introduction to servo systems, including:
1. It defines a servo system as one that controls mechanical devices in compliance with varying position or speed target values from a command.
2. It describes three major types of control systems - open loop, semi-closed loop, and full-closed loop - and compares their features such as precision, ability to handle load fluctuations, and complexity.
3. It outlines the typical components of a servo system, including the servo motor, detector, driver, and position controller, and describes how they work together to provide position and speed feedback control of the motor.Eee3420 lecture08 rev2011
Eee3420 lecture08 rev2011benson215
╠²
This document provides an overview of sensors, actuators, and programmable logic controller (PLC) applications in industrial control. It discusses various types of common sensors such as inductive proximity, capacitive, optical, and mechanical contact sensors. It also describes actuator types including solenoids, valves, cylinders, and motors. Finally, it provides examples of how PLCs can be used with these sensors and actuators for industrial automation and control applications.Eee3420 lecture07 rev2011
Eee3420 lecture07 rev2011benson215
╠²
This document provides an overview of communication protocols and PLC communication techniques. It begins with learning objectives to understand communication protocols and PLC communication. It then introduces industrial networks and how multiple control systems like PLCs, robots, and computers must communicate to work together. It discusses various communication methods including serial, parallel, transmission rates and distances. It also covers topics like industrial network characteristics, hierarchy, response times, bandwidth, efficiency, access methods, topologies, number of devices, capabilities, message lengths, vendor support, OSI models, traditional industrial networks like DeviceNet and Profibus, and serial communication standards like RS-232.Eee3420 lecture06 rev2011
Eee3420 lecture06 rev2011benson215
╠²
This document provides an overview of sequential function charts (SFC) for process control design. It defines SFCs as a graphical programming language used to describe control sequences. The key components of SFCs are defined as steps, transitions, and actions. Various SFC structures are presented, including simple sequences, parallel sequences, and branching sequences. Implementation of SFCs using ladder logic and sequence bits is also described. An example of using SFCs to control a three-floor lift is presented to illustrate how SFCs can be applied to model sequential process control applications.Eee3420 lecture05 rev2011
Eee3420 lecture05 rev2011benson215
╠²
This document discusses designing control processes using flowchart techniques. It begins by defining the basic components of a flowchart like blocks, arrows, and decision points. It then provides examples of implementing simple sequential processes as flowcharts, including a water tank filling process. The document explains two methods for representing flowcharts in ladder logic programs using block logic or sequence bits. Finally, it presents a example of using flowcharts and high-level instructions to control the movement of a cart system.Eee3420 lecture04 rev2011
Eee3420 lecture04 rev2011benson215
╠²
This document provides an overview of an advanced PLC programming lecture for a course on industrial control. It discusses the structure and programming of Mitsubishi FX series PLCs, including details on hardware components like inputs, outputs, auxiliary relays and data registers. It also covers advanced programming techniques like special instructions, representation of operands, and data formats including bit devices, word devices, signed binary, hexadecimal, BCD, scientific notation and floating point values.Eee3420 lecture03 rev2011
Eee3420 lecture03 rev2011benson215
╠²
This document provides an overview of programmable logic controller (PLC) programming. It discusses the IEC 61131 standards for PLC programming languages including ladder logic, sequential function charts, function block diagrams, structured text, and instruction list. It also provides examples of programming basics like logic gates, latches, timers, and shift registers in ladder logic for different PLC brands like Allen-Bradley, Mitsubishi, and Omron.Eee3420 lecture02 rev2011
Eee3420 lecture02 rev2011benson215
╠²
This document provides an overview of programmable logic controllers (PLCs) and their hardware components. It discusses the basic components of a PLC including the power supply, central processing unit, input/output terminals, and indicator lights. It also describes common input and output devices used with PLCs such as sensors, actuators, and relays. The document discusses how inputs are connected to a PLC and converted to a format readable by its logic. It also describes how PLCs convert internal logic levels to external voltage levels on the outputs. Finally, it summarizes key aspects of PLC hardware and wiring.Recently uploaded (20)
Introduction to Natural Language Processing - Stages in NLP Pipeline, Challen...
Introduction to Natural Language Processing - Stages in NLP Pipeline, Challen...resming1
╠²
Lecture delivered in 2021. This gives an introduction to Natural Language Processing. It describes the use cases of NLP in daily life. It discusses the stages in NLP Pipeline. It highlights the challenges involved covering the different levels of ambiguity that could arise. It also gives a brief note on the present scenario with the latest language models, tools and frameworks/libraries for NLP.Tesla-Stock-Analysis-and-Forecast.pptx (1).pptx
Tesla-Stock-Analysis-and-Forecast.pptx (1).pptxmoonsony54
╠²
this is data science ppt for tesla stock (linear regression)Generative AI & Scientific Research : Catalyst for Innovation, Ethics & Impact
Generative AI & Scientific Research : Catalyst for Innovation, Ethics & ImpactAlqualsaDIResearchGr
╠²
Invited keynote at the Artificial Intelligence Symposium on AI-powered Research Innovation, taking place at ENSEM (L'├ēcole Nationale Sup├®rieure d'├ēlectricit├® et de M├®canique), Casablanca on June 21, 2025. IŌĆÖll be giving a keynote titled: "Generative AI & Scientific Research: Catalyst for Innovation, Ethics & Impact". Looking forward to engaging with researchers and doctoral students on how Generative AI is reshaping the future of science, from discovery to governance ŌĆö with both opportunities and responsibilities in focus.
#AI hashtag#GenerativeAI #ScientificResearch #Innovation #Ethics #Keynote #AIinScience #GAI #ResearchInnovation #Casablanca
1. Thinking, Creative Thinking, Innovation
2. Societies Evolution from 1.0 to 5.0
3. AI - 3P Approach, Use Cases & Innovation
4. GAI & Creativity
5. TrustWorthy AI
6. Guidelines on The Responsible use of GAI In ResearchRapid Prototyping for XR: Lecture 6 - AI for Prototyping and Research Directi...
Rapid Prototyping for XR: Lecture 6 - AI for Prototyping and Research Directi...Mark Billinghurst
╠²
This is lecture 6 in the course on Rapid Prototyping for XR, taught on June 13th, 2025 by Mark Billinghurst. This lecture was about using AI for Prototyping and Research Directions. International Journal of Advanced Information Technology (IJAIT)
International Journal of Advanced Information Technology (IJAIT)ijait
╠²
International journal of advanced Information technology (IJAIT) is a bi monthly open access peer-
reviewed journal, will act as a major forum for the presentation of innovative ideas, approaches,
developments, and research projects in the area advanced information technology applications and
services. It will also serve to facilitate the exchange of information between researchers and industry
professionals to discuss the latest issues and advancement in the area of advanced IT. Core areas of
advanced IT and multi-disciplinary and its applications will be covered during the conferences.Call For Papers - 17th International Conference on Wireless & Mobile Networks...
Call For Papers - 17th International Conference on Wireless & Mobile Networks...hosseinihamid192023
╠²
17th International Conference on Wireless & Mobile Networks (WiMoNe 2025) will provide
an excellent international forum for sharing knowledge and results in theory, methodology and
applications of Wireless & Mobile computing Environment. Current information age is witnessing
a dramatic use of digital and electronic devices in the workplace and beyond. Wireless, Mobile
Networks & its applications had received a significant and sustained research interest in terms of
designing and deploying large scale and high performance computational applications in real life.
The aim of the conference is to provide a platform to the researchers and practitioners from both
academia as well as industry to meet and share cutting-edge development in the field.Rapid Prototyping for XR: Lecture 4 - High Level Prototyping.
Rapid Prototyping for XR: Lecture 4 - High Level Prototyping.Mark Billinghurst
╠²
This is lecture 4 in the course on Rapid Prototyping for XR, taught by Mark Billinghurst on June 11th, 2025. This lecture is about High Level Prototyping.How to Un-Obsolete Your Legacy Keypad Design
How to Un-Obsolete Your Legacy Keypad DesignEpec Engineered Technologies
╠²
For any number of circumstances, obsolescence risk is ever present in the electronics industry. This is especially true for human-to-machine interface hardware, such as keypads, touchscreens, front panels, bezels, etc. This industry is known for its high mix and low-volume builds, critical design requirements, and high costs to requalify hardware. Because of these reasons, many programs will face end-of-life challenges both at the component level as well as at the supplier level.
Redesigns and qualifications can take months or even years, so proactively managing this risk is the best way to deter this. If an LED is obsolete or a switch vendor has gone out of business, there are options to proceed.
In this webinar, we cover options to redesign and reverse engineer legacy keypad and touchscreen designs.
For more information on our HMI solutions, visit https://www.epectec.com/user-interfaces.
Introduction to Python Programming Language
Introduction to Python Programming Languagemerlinjohnsy
╠²
This PPT covers features, applications, variable, data types and statements in PythonMachine Learning - Classification Algorithms
Machine Learning - Classification Algorithmsresming1
╠²
This covers traditional machine learning algorithms for classification. It includes Support vector machines, decision trees, Naive Bayes classifier , neural networks, etc.
It also discusses about model evaluation and selection. It discusses ID3 and C4.5 algorithms. It also describes k-nearest neighbor classifer.Cadastral Maps
Cadastral MapsGoogle
╠²
Preparation of cadastral maps based by Engineer Dungo Tizazu from Dire Dawa University Generative AI & Scientific Research : Catalyst for Innovation, Ethics & Impact
Generative AI & Scientific Research : Catalyst for Innovation, Ethics & ImpactAlqualsaDIResearchGr
╠²
Call For Papers - 17th International Conference on Wireless & Mobile Networks...
Call For Papers - 17th International Conference on Wireless & Mobile Networks...hosseinihamid192023
╠²
Ad
3. relutance and hysteresis motor
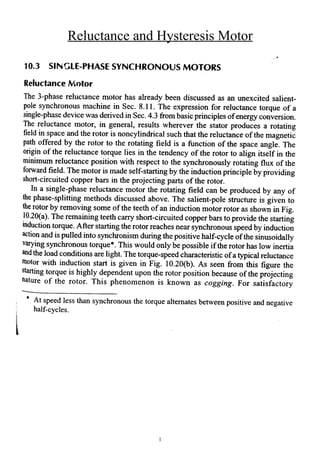
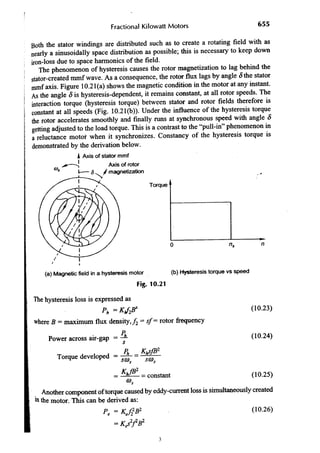
- 1. Reluctance and Hysteresis Motor 1
- 2. 2
- 3. 3
- 4. 4