Formation compl¨¨te ici:
https://www.alphorm.com/tutoriel/formation-en-ligne-certified-ethical-hacker-v9-1-4-reussir-ceh-v9
La certification CEH dans sa version 9 est actuellement la plus avanc¨¦e au monde dans le domaine de l'Ethical Hacking.
Cette formation CEH V9 aborde 18 modules successifs li¨¦s aux domaines de la s¨¦curit¨¦ informatique les plus r¨¦cents, en d¨¦taillant plus de 270 attaques techniques de hacking.
La formation CEH V9 permet ¨¤ tous les informaticiens et tous les passionn¨¦s d'informatique ayant un profil technique de d¨¦couvrir et de mieux comprendre les modes op¨¦ratoires, les m¨¦thodes employ¨¦es ainsi plus de 2200 outils utilis¨¦s par les pirates informatiques pour contourner et d¨¦jouer les protections de s¨¦curit¨¦ en place.
Cette formation CEH V9 vous aidera ¨¤ maitriser une m¨¦thodologie de piratage ¨¦thique qui pourra aussi bien ¨ştre utilis¨¦e dans un test d'intrusion que dans une situation de piratage ¨¦thique.
Cette formation CEH V9 est destin¨¦e ¨¤ vous transmettre une vision ¨¦tendue des vari¨¦t¨¦s d'attaques possibles dans un SI. Vous quitterez avec des comp¨¦tences en piratage ¨¦thique qui sont hautement recherch¨¦es.
Cette formation CEH V9 vous permettra d'obtenir l'examen de certification CEH Certified Ethical Hacker.
Playwright: A New Test Automation Framework for the Modern WebApplitools
?
Join Andrey Lushnikov, Principal Engineer at Microsoft, as he shares insights into the decisions behind the creation and development Playwright; how Playwright is the only tool that covers modern automation needs; and why it is believed Playwright is the first framework that can be used for cross-browser testing.
The document discusses SSL/TLS trends, practices, and futures. It covers global SSL encryption trends and drivers like increased spending on security and regulatory pressure. It discusses SSL best practices like enabling TLS 1.2, disabling weak protocols, using strong cipher strings, and enabling HTTP Strict Transport Security. The document also looks at solutions from F5 like hardware security modules, advanced key and certificate management, and market leading encryption support. It explores emerging standards like TLS 1.3 and topics like elliptic curve cryptography. Finally, it discusses what's next such as OCSP stapling and F5's SSL everywhere architecture.
Alphorm.com Formation Hacking et S¨¦curit¨¦, l'essentielAlphorm
?
Lien formation compl¨¨te ici:
http://www.alphorm.com/tutoriel/formation-en-ligne-hacking-et-securite-lessentiel
Cette formation est une approche offensive des pratiques et des m¨¦thodologies utilis¨¦es par les hackers dans le cadre dˇŻintrusion sur des r¨¦seaux et applications. Nous mettons lˇŻaccent sur la compr¨¦hension technique et pratique des diff¨¦rentes formes dˇŻattaques existantes, en mettant lˇŻaccent sur les vuln¨¦rabilit¨¦s les plus critiques.
Vous pourrez, au terme de cette formation r¨¦aliser des audits de s¨¦curit¨¦ (test de p¨¦n¨¦tration) au sein de votre infrastructure.
Il sˇŻagit dˇŻune formation compl¨¨te sur lˇŻessentiel de ce dont vous avez besoin afin de mettre la casquette du Hacker dans vos tests de vuln¨¦rabilit¨¦ , mais aussi si vous souhaitez avoir une approche offensive de la s¨¦curit¨¦ informatique , ainsi que toute personne souhaitant acqu¨¦rir les connaissances techniques dˇŻattaques , il faut savoir attaquer pour mieux se d¨¦fendre.
La pr¨¦sentation des techniques dˇŻattaques et vuln¨¦rabilit¨¦s sont ax¨¦es pratique s au sein dˇŻun lab de test de p¨¦n¨¦tration.
Deploy and Configure an Enterprise Root CA & Subordinate CA in Windows Server...Md. Abdul Barek
?
An enterprise root CA is a certificate authority server that signs its own certificate and can issue certificates to members of its domain based on templates in Active Directory. It is suitable for organizations with fewer than 300 users who need a single CA without a complex hierarchy. The document provides steps to install and configure an enterprise root CA and subordinate CA on domain controllers in Active Directory to issue certificates.
M2i Webinar - ITIL 4, une ¨¦volution majeure du r¨¦f¨¦rentiel (12-04-2019)M2i Formation
?
M2i Webinar - ITIL 4, une ¨¦volution majeure du r¨¦f¨¦rentiel
Revivez notre webinar anim¨¦ par Marielle Ribet.
12 avril 2019
Au programme :
1- Historique dˇŻITIL : d¨¦j¨¤ 33 ans de succ¨¨s
2- Les nouveaut¨¦s de la version 4
Int¨¦gration de lˇŻagilit¨¦, de DevOps et du Cloud
Le syst¨¨me de valeur des services
Les 7 principes
La cha?ne de valeur des services
Les pratiques g¨¦n¨¦rales, de gestion des services et de gestion technique
3- De V3 ¨¤ V4
De la cr¨¦ation ¨¤ la co-cr¨¦ation de valeur
Des processus aux pratiques
Du cycle de vie au syst¨¨me de valeur
4- Le nouveau cursus de formation et les passerelles
www.m2iformation.fr
FIDO and the Future of User AuthenticationFIDO Alliance
?
The document discusses the problems with password-based authentication and introduces FIDO authentication as a solution. It summarizes that FIDO authentication uses public key cryptography to allow users to authenticate with a single gesture on their device, without needing shared secrets or passwords. FIDO authentication is being adopted by major companies and specifications are standardized, with over 500 authenticators certified for compatibility and security. The presentation promotes FIDO as the future of secure, usable authentication.
The document provides an overview of Fortify on Demand (FoD) security assessments. It summarizes that FoD offers automated static and dynamic application security testing through their analysis tools and security experts. It provides concise summaries of their baseline, standard, and premium assessment levels that vary in coverage, user accounts tested, and inclusion of manual security testing. The document highlights some customer success stories and commonalities that organizations achieving success have in developing a secure software development lifecycle.
The document discusses creating and documenting an API. It outlines the workshop goals of creating an API, documenting it, and creating reference documents and how-to guides. It then provides steps to create an API account on sheetlabs.com, import a spreadsheet to create an API from the data, and document the API by describing what it contains and how results can be filtered. It also includes links to example API documentation and discusses creating conceptual documents, documenting the API using Swagger, and writing how-to documentation through examples, code libraries, and SDKs.
Choosing the right process improvement tool for your project.
Learn how an experienced engineer decides when simulation is the right tool for his projects,
and when it isn't.
With the evolution of process improvement software, it can be difficult to decide the right tool for the job. Using something too powerful and complex can be a lengthy and unnecessary process, but underestimating the depth of analysis required and choosing something too simplistic early in a project can result in repeated work later.
This document provides information about automating scans with the OWASP Zap security tool, including:
- An introduction to the baseline scan, which runs quickly and can be easily integrated into continuous integration pipelines.
- Options for more thorough scanning using the Zap command line interface, Jenkins plugin, or driving the Zap API directly from scripts.
- Tips for customizing Zap scans, such as configuring authentication, tuning speed and accuracy, and getting help with the documentation and user community.
- A demonstration of exploring targets using the Zap API, running passive and active scans, and generating reports programmatically.
Cypress is a testing tool that allows for fast, easy, and reliable testing of anything that runs in a browser. It differs from other tools in that it does not use Selenium, focuses on end-to-end testing, works on any front-end framework, uses only JavaScript for tests, and runs much faster than other options. Cypress tests the application as a real user would and allows debugging of test flows. It also supports plugins, common commands and assertions, and has a similar syntax to unit testing frameworks.
The Offensive Security Certified Professional (OSCP) is one of the most technical and most challenging certifications for information security professionals.
For More information please contact us : https://www.infosectrain.com/
The document discusses the basic steps for configuring Spring Security:
1. Set dependencies and create a WebSecurityConfigurerAdapter configuration class
2. Configure authentication using in-memory, JDBC, or LDAP
3. Ensure the security configuration is loaded by registering WebSecurityConfiguration
4. Configure the springSecurityFilterChain by extending AbstractSecurityWebApplicationInitializer
It provides code examples for configuring different authentication types and securing different URL patterns.
This document provides an overview and agenda for a presentation on using the Splunk Java SDK. The presenter is introduced as a developer evangelist for Splunk. The agenda includes an overview of the Splunk platform, REST API and SDKs, a detailed look at the Java SDK, examples of using the SDK to log events, search data, and work with saved searches, and a discussion of ways to think outside the box when using Splunk with Java.
There exist many code review checklist blogs/articles in the net telling standard Java best practices/guidelines; And I have come up with a checklist accommodating best practices from some of the recent popular books (reference given) and guidelines from Oracle (on Security).
Managing Microservices With The Istio Service Mesh on KubernetesIftach Schonbaum
?
Istio is an open source service mesh that provides traffic management, service identity and security, observability and policy enforcement capabilities for microservices. At its core, Istio uses the Envoy proxy as a sidecar for each microservice to mediate all inbound and outbound traffic. It provides features like load balancing, failure recovery, metrics and monitoring out of the box without requiring any code changes to the application. Istio's control plane components like Pilot, Mixer and Citadel manage the proxy configuration, collect telemetry, and handle authentication tasks.
Postman is an API development tool that allows users to design, manage, run, test, document, and share APIs. It provides features like request building, documentation, environments, test automation, and collaboration. Alternatives include Paw, Insomnia, command line tools like cURL, and services from Apigee and Apiary. The document recommends using any tool that helps share APIs, especially for complex projects and team collaboration.
Discussion on angular offering, approaches to integrate web worker in angular (5 and 6) application, their pros and cons. A sample example implementation using custom web worker approach and integrating the same with CLI(1 and 6) and the application.
FIDO and the Future of User AuthenticationFIDO Alliance
?
The document discusses the problems with password-based authentication and introduces FIDO authentication as a solution. It summarizes that FIDO authentication uses public key cryptography to allow users to authenticate with a single gesture on their device, without needing shared secrets or passwords. FIDO authentication is being adopted by major companies and specifications are standardized, with over 500 authenticators certified for compatibility and security. The presentation promotes FIDO as the future of secure, usable authentication.
The document provides an overview of Fortify on Demand (FoD) security assessments. It summarizes that FoD offers automated static and dynamic application security testing through their analysis tools and security experts. It provides concise summaries of their baseline, standard, and premium assessment levels that vary in coverage, user accounts tested, and inclusion of manual security testing. The document highlights some customer success stories and commonalities that organizations achieving success have in developing a secure software development lifecycle.
The document discusses creating and documenting an API. It outlines the workshop goals of creating an API, documenting it, and creating reference documents and how-to guides. It then provides steps to create an API account on sheetlabs.com, import a spreadsheet to create an API from the data, and document the API by describing what it contains and how results can be filtered. It also includes links to example API documentation and discusses creating conceptual documents, documenting the API using Swagger, and writing how-to documentation through examples, code libraries, and SDKs.
Choosing the right process improvement tool for your project.
Learn how an experienced engineer decides when simulation is the right tool for his projects,
and when it isn't.
With the evolution of process improvement software, it can be difficult to decide the right tool for the job. Using something too powerful and complex can be a lengthy and unnecessary process, but underestimating the depth of analysis required and choosing something too simplistic early in a project can result in repeated work later.
This document provides information about automating scans with the OWASP Zap security tool, including:
- An introduction to the baseline scan, which runs quickly and can be easily integrated into continuous integration pipelines.
- Options for more thorough scanning using the Zap command line interface, Jenkins plugin, or driving the Zap API directly from scripts.
- Tips for customizing Zap scans, such as configuring authentication, tuning speed and accuracy, and getting help with the documentation and user community.
- A demonstration of exploring targets using the Zap API, running passive and active scans, and generating reports programmatically.
Cypress is a testing tool that allows for fast, easy, and reliable testing of anything that runs in a browser. It differs from other tools in that it does not use Selenium, focuses on end-to-end testing, works on any front-end framework, uses only JavaScript for tests, and runs much faster than other options. Cypress tests the application as a real user would and allows debugging of test flows. It also supports plugins, common commands and assertions, and has a similar syntax to unit testing frameworks.
The Offensive Security Certified Professional (OSCP) is one of the most technical and most challenging certifications for information security professionals.
For More information please contact us : https://www.infosectrain.com/
The document discusses the basic steps for configuring Spring Security:
1. Set dependencies and create a WebSecurityConfigurerAdapter configuration class
2. Configure authentication using in-memory, JDBC, or LDAP
3. Ensure the security configuration is loaded by registering WebSecurityConfiguration
4. Configure the springSecurityFilterChain by extending AbstractSecurityWebApplicationInitializer
It provides code examples for configuring different authentication types and securing different URL patterns.
This document provides an overview and agenda for a presentation on using the Splunk Java SDK. The presenter is introduced as a developer evangelist for Splunk. The agenda includes an overview of the Splunk platform, REST API and SDKs, a detailed look at the Java SDK, examples of using the SDK to log events, search data, and work with saved searches, and a discussion of ways to think outside the box when using Splunk with Java.
There exist many code review checklist blogs/articles in the net telling standard Java best practices/guidelines; And I have come up with a checklist accommodating best practices from some of the recent popular books (reference given) and guidelines from Oracle (on Security).
Managing Microservices With The Istio Service Mesh on KubernetesIftach Schonbaum
?
Istio is an open source service mesh that provides traffic management, service identity and security, observability and policy enforcement capabilities for microservices. At its core, Istio uses the Envoy proxy as a sidecar for each microservice to mediate all inbound and outbound traffic. It provides features like load balancing, failure recovery, metrics and monitoring out of the box without requiring any code changes to the application. Istio's control plane components like Pilot, Mixer and Citadel manage the proxy configuration, collect telemetry, and handle authentication tasks.
Postman is an API development tool that allows users to design, manage, run, test, document, and share APIs. It provides features like request building, documentation, environments, test automation, and collaboration. Alternatives include Paw, Insomnia, command line tools like cURL, and services from Apigee and Apiary. The document recommends using any tool that helps share APIs, especially for complex projects and team collaboration.
Discussion on angular offering, approaches to integrate web worker in angular (5 and 6) application, their pros and cons. A sample example implementation using custom web worker approach and integrating the same with CLI(1 and 6) and the application.
The document summarizes the 2020 TTT Program on Day 3 in Jeju, discussing Edge AI and combining IoT with AI using on-device AI boards. It also lists current AI student projects involving deep learning, transfer learning, and AI for sign language conversation. Finally, it provides information on the 2020-1 semester course covering IoT cloud service development using platforms like Azure IoT Hub, AWS IoT Core, and Google Firebase, and includes links to course materials.
This document provides an introduction to developing Internet of Things (IoT) applications using the NodeMCU development board and IoT cloud platforms. It covers basic Arduino programming on NodeMCU, reading sensor values from devices like DHT11, and sending sensor data to the IoT platform Ubidots. Hands-on labs demonstrate building a real-time humidity and temperature monitor and a smart switch controller that retrieve and send data to control an LED. Future topics discussed include IoT communication protocols, machine learning, and applying IoT in various fields.
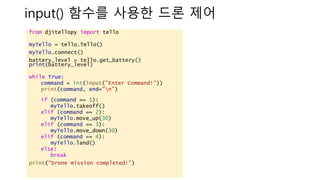
38. ?? ??? ??, ??
from djitellopy import tello
import cv2
import time
tello = tello.Tello()
tello.connect()
battery_level = tello.get_battery()
print(f"Battery Life Percentage: {battery_level}")
time.sleep(2)
print("Turn Video Stream On")
tello.streamon()
# read a single image from the Tello video feed
print("Read Tello Image")
frame_read = tello.get_frame_read()
print(type(frame_read))
time.sleep(2)
while True:
# read a single image from the Tello video feed
print("Read Tello Image")
tello_video_image = frame_read.frame
# use opencv to write image
if tello_video_image is not None:
cv2.imshow("TelloVideo", tello_video_image)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
tello.streamoff()
cv2.destroyWindow('TelloVideo')
cv2.destroyAllWindows()
58. forward/ backward ??
# ?? ??? ?? : z_area = offset_z
offset_z = w * h
# ?? ??? ?? update ? forward/ backward ??
def adjust_tello_position(offsetz):
f not 15000 <= offset_z <= 30000 and offset_z != 0:
if offset_z < 15000:
tello.move_forward(20)
elif offset_z > 30000:
tello.move_back(20)
?? ?? : https://drive.google.com/file/d/1fJn9bOhB9cEKs71fDCtqzvWxQfNcb4z5/view?usp=sharing
59. left/ right ??
offset_x = face_center_x - center_x
def adjust_tello_position(offset_x):
"""
Adjusts the position of the tello drone based on the offset values given from th
e frame
:param offset_x: Offset between center and face x coordinates
"""
if not -90 <= offset_x <= 90 and offset_x != 0:
# offset_x? ???? ?? ?? ???? ?? ?? ?? ??
if offset_x < 0:
tello.rotate_counter_clockwise(10)
# offset_x? ???? ?? ???? ?? ?? ?? ??
elif offset_x > 0:
tello.rotate_clockwise(10)
?? ?? : https://drive.google.com/file/d/1WXTTag3aDv66SXSCYzapRxOcCA3PNnSK/view?usp=sharing
60. up/ down ??
# Add 30 so that the drone covers as much of the subject as possible
offset_y = face_center_y - center_y - 30
"""
Adjusts the position of the tello drone based on the offset values given
from the frame
:param offset_y: Offset between center and face y coordinates
"""
if not -70 <= offset_y <= 70 and offset_y != -30:
if offset_y < 0:
print('move up')
tello.move_up(20)
elif offset_y > 0:
print('move down')
tello.move_down(20)
?? ?? : https://drive.google.com/file/d/1WXTTag3aDv66SXSCYzapRxOcCA3PNnSK/view?usp=sharing
61. Face following ??
?? ?? : https://drive.google.com/file/d/1f4Xcq8W4HL7tRSILb-hXrV9Jd-gywPPp/view?usp=sharing
62. Face Detection AI ????
? Haar Cascade
? https://github.com/opencv/opencv/blob/master/data/haarcascades/haarcas
cade_frontalface_default.xml
? Dlib : HOG + CNN
? https://github.com/davisking/dlib
? MTCNN
? https://github.com/ipazc/mtcnn
? OpenCV DNN : Caffe based DNN
? https://github.com/opencv/opencv/tree/master/samples/dnn/face_detector
? YOLO
? https://velog.io/@hhhong/Object-Detection-with-YOLO





















![DJITelloPy ??
? API : djitellopy.readthedocs.io
? GitHub : https://github.com/damiafuentes/DJITelloPy
? DJITelloPy ?? ??
? ???
? pip install djitellopy==2.4.0
? ???
? [setting]->[Project]->[Python Interpreter] -> + ˇ®djitellopy 2.4.0ˇŻ](https://image.slidesharecdn.com/aidrone2024-240130130627-f8aeed32/85/AI-21-320.jpg)

















































































![[C++ Korea] Effective Modern C++ mva item 7 distinguish between and {} when c...](https://cdn.slidesharecdn.com/ss_thumbnails/ckoreaeffectivemoderncmvaitem7distinguishbetweenandwhencreatingobjects-150424205331-conversion-gate01-thumbnail.jpg?width=560&fit=bounds)


![[1B4]??????????? ????????_???????????](https://cdn.slidesharecdn.com/ss_thumbnails/1b4-140928080341-phpapp01-thumbnail.jpg?width=560&fit=bounds)
![[143] Modern C++ ??? ?? ??](https://cdn.slidesharecdn.com/ss_thumbnails/143deview2018modernc9-181011024146-thumbnail.jpg?width=560&fit=bounds)


![[Flutter Meetup In Songdo] ?????????? ????????? ????](https://cdn.slidesharecdn.com/ss_thumbnails/fluttermeetupinsongdo-230923083413-6792eb64-thumbnail.jpg?width=560&fit=bounds)
![[??] ??? ?? [2015.5.23]](https://cdn.slidesharecdn.com/ss_thumbnails/v2-150524160009-lva1-app6891-thumbnail.jpg?width=560&fit=bounds)



















