

![??? ??
? ?? ?? ??
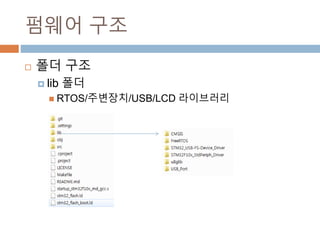
? thread_mw
hexairbotFrameComplete()
computeRC()
? ????? ?? ???? ?????? ??
? ??? ???(?,??,?,???,AUX1,AUX2,AUX3,AUX4)? rcData[] ??? ??50Hz
computeIMU()
? ???/???/??? ??? ?? ??? ??
annexCode() ? ??? ??? rcData[]? ??? 1000~2000??(??? 1500), ???? ? rcCommand[]?
0~500 ??? ??
pid_controller()
mixTable()
writeServos()
writeMotors()
? rcCommnad[]?? ???? PID??? ?? ???? ??
? ?? ??? ?? PID??? ?? ?? ???? ?? PWM?? ??
? PWM?? ?? ?? ??
280Hz](https://image.slidesharecdn.com/random-150328233741-conversion-gate01/85/2015-3-28-25-320.jpg)
![??? ??
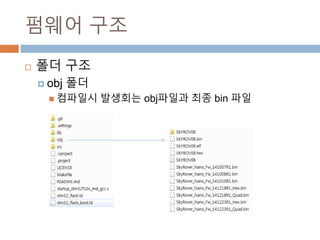
? MSP_SET_RAW_RC_TINY
evaluateCommand()
{
switch( cmdMSP )
{
case MSP_SET_RAW_RC_TINY:
for(i = 0;i < 4;i++)
{
serialRcValue[i] = 1000 + read8() * 4;
}
auxChannels = read8();
ĪŁ
Index
0 0~250 ©C Roll ?
1 0~250 ©C Pitch ?
2 0~250 ©C Yaw ?
3 0~250 ©C Throttle ?
4 0~255 ©C Aux ?
7:6 bit - Aux1
5:4 bit - Aux2
3:2 bit - Aux3
1:0 bit - Aux4
Aux1
- 0 : Headfree Mode Off
- 2 : Headfree Mode On
Aux2
- 0 : ???? Off
- 2 : ???? On](https://image.slidesharecdn.com/random-150328233741-conversion-gate01/85/2015-3-28-30-320.jpg)
![?? ??
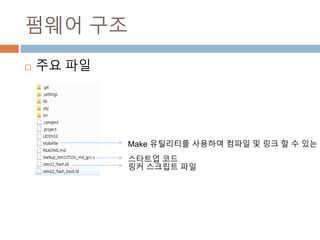
? ?? ???
? Roll/Pitch/Yaw/??? ?? ?? ?? ??? ?? ?? ?? ???
? mixer.c ? ?? ???? ??? ??
FRONT_L ?? ??? = (+1xRoll ????) + (-1xPitch ????) + (-1xYaw ????)
REAR_L ?? ??? = (+1xRoll ????) + (+1xPitch ????) + (+1xYaw ????)
FRONT_R ?? ??? = (-1xRoll ????) + (-1xPitch ????) + (+1xYaw ????)
REAR_R ?? ??? = (-1xRoll ????) + (+1xPitch ????) + (-1xYaw ????)
static const motorMixer_t mixerQuadX[] = {
{ 1.0f, -1.0f, 1.0f, -1.0f }, // REAR_R
{ 1.0f, -1.0f, -1.0f, 1.0f }, // FRONT_R
{ 1.0f, 1.0f, 1.0f, 1.0f }, // REAR_L
{ 1.0f, 1.0f, -1.0f, -1.0f }, // FRONT_L
};
Throttle
Pitch
Yaw
Roll](https://image.slidesharecdn.com/random-150328233741-conversion-gate01/85/2015-3-28-36-320.jpg)
??? ???? ??? ?? 2015. 3.28.
- 1. ??? ??? ?? 2015. 3. 28. ???(??)
- 2. ?? ? ??? History ? SmartRover App ? ?? ?? ? ???? IDE ? ???? IDE ? ??? ?? ? ?? ?? ? ?? ?? ? ?? ??
- 3. ??? History ? CupDrone ??? ? Multiwii ??? ??? ??? SkyRover Nano ????? F/W ?? ? ?? ?? ? ?? ???? ??? Multiwii 2.3 Arduino AVR SkyRover Nano + Flexbot ?? I/F Afroflight32 GCC STM32F103 ???? ?? + + FreeRTOS ?? USB ?? + LCD Lib (u8glib) + CupDrone
- 4. SmartRover App ? ??? ??? ?? ????? App?? ??? Flexbot?? ??? ??? ? Google play?? Ī░SmartRoverĪ▒? ???? ??
- 5. ???? ©C ???? IDE ? ??? ???/??? ?? ???? IDE?? ?? ? ???? ? Java SE (JDK) ?? ? http://www.oracle.com/technetwork/java/javase/downloads/index.html ? Eclipse IDE for C/C++ Developers ?? ? https://eclipse.org/downloads/ ? GNU ARM Eclipse Plug-in ?? ? Eclipse ?? ? Help->Install New Software->Add ?? ? ?? ?? Name : GNU ARM Eclipse Plug-ins Loc : http://gnuarmeclipse.sourceforge.net/updates
- 6. ???? ©C ???? IDE ? GNU ARM Eclipse Plug-in ?? ? GNU ARM C/C++ Cross Development Tools ?? ? ???
- 7. ???? ©C ???? IDE ? ARM GCC ?? ? GNU Tools for ARM Embedded Processors ? https://launchpad.net/gcc-arm-embedded ? ???? ?? ?? ???? ? ?? ? ?? ?? ???? Add path to environment variable ??
- 8. ???? ©C ???? IDE ? Cross Build Tools ?? ? http://sourceforge.net/projects/gnuarmeclipse/files/Build% 20Tools/ Cross Build Tools.zip ???? ? ??? ?? ? ?? ?? ? C:Program FilesGNU Tools ARM Embedded4.9 2015q1bin ? 3? ?? ??
- 9. ???? ©C ???? IDE ? ???? ???? (github.com/oroca) ? File->Import ?? ? URI : https//github.com/oroca/SkyRover_Nano ??
- 10. ???? ©C ???? IDE ? ???? ???? (github.com/oroca) ? Clone URI ?? ? Import existing projects ??
- 11. ???? ©C ???? IDE ? ???? ???? (github.com/oroca) ? SkyRover_Nano ???? ??
- 12. ???? Tool ? STM32LD_GUI ? STM32F ??? ???? ????? ??? ???? ???? ???? ? ??? : http://cafe.naver.com/openrt/5943 ? ???? : https://github.com/chcbaram/stm32ld_gui ? Visual C++ 6.0?? ???
- 13. ???? Tool ? STM32LD ? ??? ??? ???? ?????? ???/?/????? ???? ? ???? : https://github.com/chcbaram/stm32ld ? ????? ??? (cygwin ? gcc ?? ??) ? gcc -o stm32ld main.c stm32ld.c main_OpenCM.c serial_win32.c - DWIN32_BUILD ? ?/????? ??? ? Mac/Linux gcc -o stm32ld main.c stm32ld.c main_OpenCM.c serial_posix.c ? ???? ? stm32ld ???? ???? ????? 1 ? ex) stm32ld COM1 115200 main.bin 1 ? ex OpenCM ??) stm32ld COM1 115200 main.bin 1 opencm
- 14. ???? ©C ???? IDE ? ???? ?????? ?? ?? ???? ? ????? ???? 1.6 ??? SkyRover ?? ??? ???? ?? ? ???? ? ????IDE 1.6?? ???? ? http://arduino.cc/en/Main/Software ?? Zip??? ???? ? ?? ?? ? SkyRover ?? ?? ? https://github.com/oroca/SkyRover_Ardu ?? Download ZIP ?? ?? ???? ? Arduino-1.6.1/hardware/oroca ??? ?? ??
- 15. ???? ©C ???? IDE ? ??->??->SkyRover ??
- 16. ???? ©C ???? IDE ? ??->??->SkyRover->?? ??
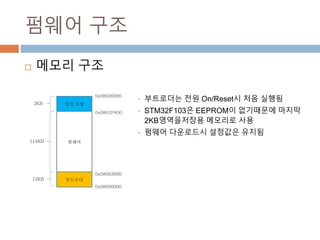
- 17. ??? ?? ? ??? ?? ??? ???? 0x08000000 0x08003000 ?? ?? 12KB 114KB 2KB 0x0801F800 0x08020000 ? ????? ?? On/Reset? ?? ??? ? STM32F103? EEPROM? ????? ??? 2KB?????? ???? ?? ? ??? ????? ???? ???
- 18. ??? ?? ? ?? ?? ? lib ?? ? RTOS/????/USB/LCD ?????
- 19. ??? ?? ? ?? ?? ? obj ?? ? ???? ???? obj??? ?? bin ??
- 20. ??? ?? ? ?? ?? ? src ?? ? ???? ?? ? Thread ?? ? FreeRTOS? Thread ?? ??
- 21. ??? ?? ? ?? ?? Make ????? ???? ??? ? ?? ? ? ?? ?? ?? ???? ?? ?? ???? ??
- 22. ??? ?? ? ?? ?? ? main.c ? main??? ?? ?? ???/?? ??? ?? ? mw.c ? ???? ???? ????, ??/????/?? ?? ? sensors.c ? ??? ??? ???? ?? ? ?? ??? ?? ?? ? imu.c ? ???/???/???? ?? Roll/Pith/Yaw?? ?? ?? ? mixer.c ? ????? ? ??? ???? ?? ? serial.c ? ??? ??? ?????? MSP ?? ?? ??
- 23. ??? ?? ? ?? ?? ? drv_***.c ? ???? ???? ??? ?? ???? ??? ?? ? drv_timer.c ? CPU? PWM ??? ? ?? ?? ? drv_pwm.c ? ?? ?? PWM ?? ?? ? config.c ? ?? FLASH? ???? ?????? ??? ?? ? board.h ? ????/????/LED? ?? ??? ??? ??
- 24. ??? ?? ? ?? ?? ?? ? thread ?? main() thread_main() thread_mw() thread_menu() thread_lcd() - ??? ?? ?? ?? - USB? ?? ?? ?? ?? - I2C??? LCD ?? ?? ??
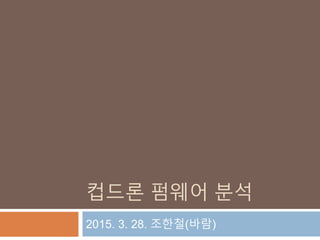
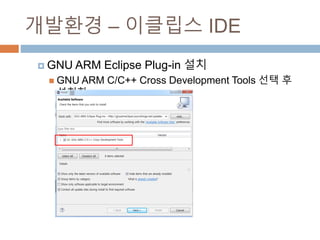
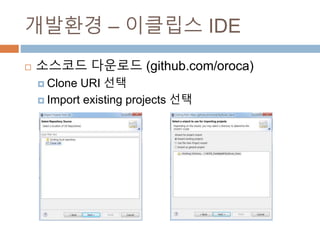
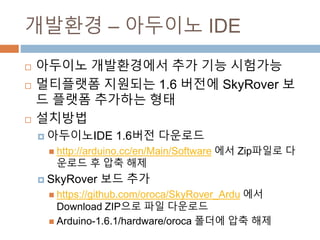
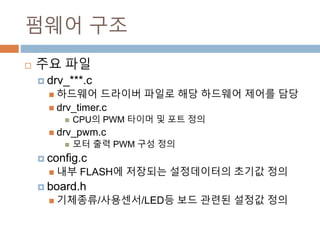
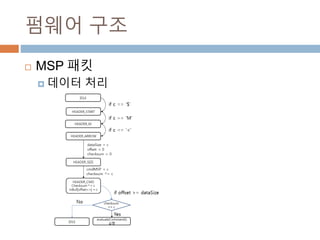
- 25. ??? ?? ? ?? ?? ?? ? thread_mw hexairbotFrameComplete() computeRC() ? ????? ?? ???? ?????? ?? ? ??? ???(?,??,?,???,AUX1,AUX2,AUX3,AUX4)? rcData[] ??? ??50Hz computeIMU() ? ???/???/??? ??? ?? ??? ?? annexCode() ? ??? ??? rcData[]? ??? 1000~2000??(??? 1500), ???? ? rcCommand[]? 0~500 ??? ?? pid_controller() mixTable() writeServos() writeMotors() ? rcCommnad[]?? ???? PID??? ?? ???? ?? ? ?? ??? ?? PID??? ?? ?? ???? ?? PWM?? ?? ? PWM?? ?? ?? ?? 280Hz
- 26. ??? ?? ? ?? ?? ? App?? MSP ????? Roll/Pitch/Yaw/Throttle ??? ?? MSP ?? annexCode() serialCom() evaluateCommand() serialRead() ??? ??? ??
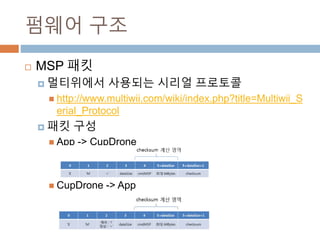
- 27. ??? ?? ? MSP ?? ? ????? ???? ??? ???? ? http://www.multiwii.com/wiki/index.php?title=Multiwii_Seri al_Protocol ? ?? ?? ? App -> CupDrone ? CupDrone -> App
- 28. ??? ?? ? MSP ?? ? ??? ??
- 29. ??? ?? ? ?? ?? ? CupDrone??? ?? ?? ??(serial.c? ??) ? MSP_SET_RAW_RC_TINY ???? ?? ??? ?? #if defined(SKYROVER) #define MSP_SET_RAW_RC_TINY 150 #define MSP_ARM 151 #define MSP_DISARM 152 #define MSP_TRIM_UP 153 #define MSP_TRIM_DOWN 154 #define MSP_TRIM_LEFT 155 #define MSP_TRIM_RIGHT 156 #endif Roll/Pitch/Yaw/Throttle/Aux ?? ?? ??? ?? ????
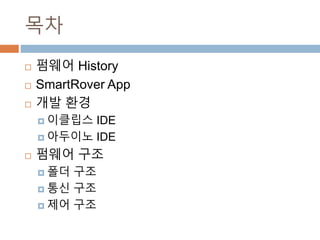
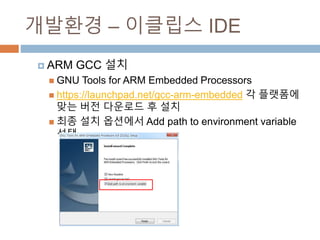
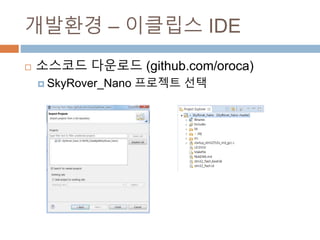
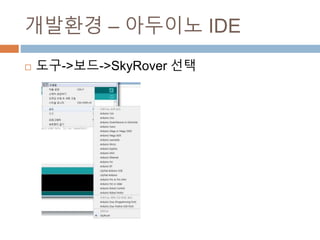
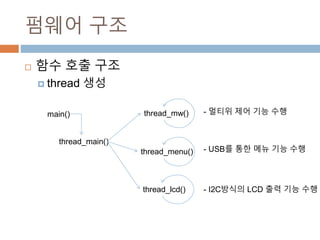
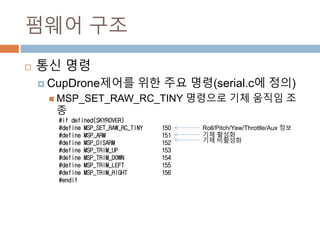
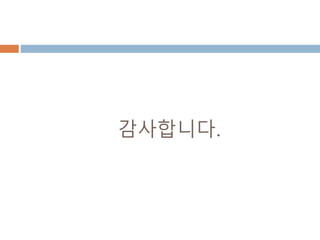
- 30. ??? ?? ? MSP_SET_RAW_RC_TINY evaluateCommand() { switch( cmdMSP ) { case MSP_SET_RAW_RC_TINY: for(i = 0;i < 4;i++) { serialRcValue[i] = 1000 + read8() * 4; } auxChannels = read8(); ĪŁ Index 0 0~250 ©C Roll ? 1 0~250 ©C Pitch ? 2 0~250 ©C Yaw ? 3 0~250 ©C Throttle ? 4 0~255 ©C Aux ? 7:6 bit - Aux1 5:4 bit - Aux2 3:2 bit - Aux3 1:0 bit - Aux4 Aux1 - 0 : Headfree Mode Off - 2 : Headfree Mode On Aux2 - 0 : ???? Off - 2 : ???? On
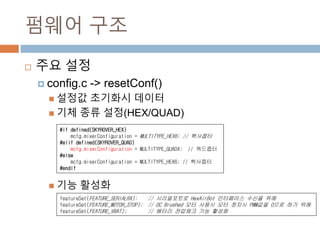
- 31. ??? ?? ? ?? ?? ? board.h ? ?? ?? ??(HEX/QUAD) ? ???? ?? //#define SKYROVER_HEX #define SKYROVER_QUAD #define GYRO #define ACC #define MAG #define BARO #define ACC_AS_MAG #define SENSORS_SET (SENSOR_ACC | SENSOR_BARO)
- 32. ??? ?? ? ?? ?? ? config.c -> resetConf() ? ??? ???? ??? ? ?? ?? ??(HEX/QUAD) ? ?? ??? #if defined(SKYROVER_HEX) mcfg.mixerConfiguration = MULTITYPE_HEX6; // ???? #elif defined(SKYROVER_QUAD) mcfg.mixerConfiguration = MULTITYPE_QUADX; // ???? #else mcfg.mixerConfiguration = MULTITYPE_HEX6; // ???? #endif featureSet(FEATURE_SERIALRX); // ?????? HexAirBot ????? ??? ?? featureSet(FEATURE_MOTOR_STOP); // DC Brushed ?? ??? ?? ??? PWM?? 0?? ?? ?? featureSet(FEATURE_VBAT); // ??? ???? ?? ???
- 33. ??? ?? ? ?? ?? ? config.c -> resetConf() ? ????? ?? ? ?? ?? ?? ? Yaw? ?? ?? mcfg.serialrx_type = SERIALRX_HEXAIRBOT; // HexAirBot mcfg.minthrottle = 1150; mcfg.maxthrottle = 1850; mcfg.motor_pwm_rate = 1000; // Hz DC ?????? 500 ???? ?? cfg.yaw_direction = 1;
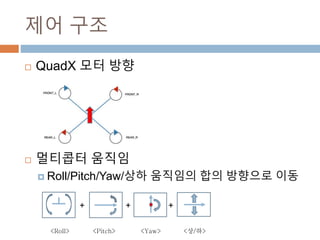
- 34. ?? ?? ? QuadX ?? ?? ? ???? ??? ? Roll/Pitch/Yaw/?? ???? ?? ???? ?? <Roll> <Pitch> <Yaw> <?/?> + + +
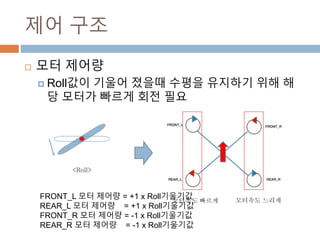
- 35. ?? ?? ? ?? ??? ? Roll?? ??? ??? ??? ???? ?? ?? ??? ??? ?? ?? <Roll> ???? ??????? ??? FRONT_L ?? ??? = +1 x Roll???? REAR_L ?? ??? = +1 x Roll???? FRONT_R ?? ??? = -1 x Roll???? REAR_R ?? ??? = -1 x Roll????
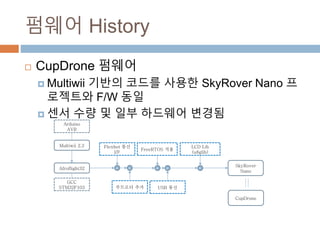
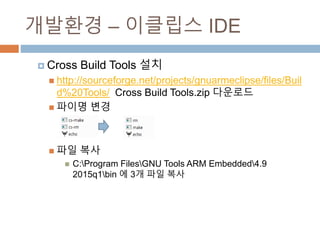
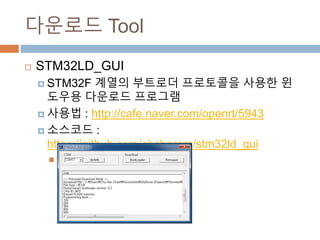
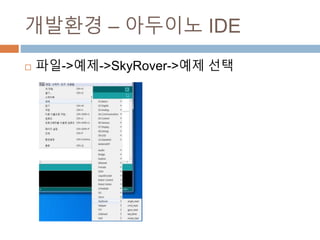
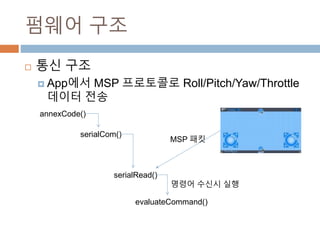
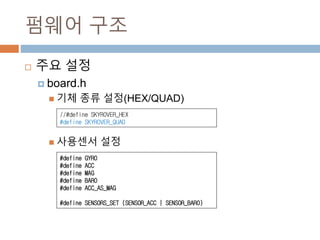
- 36. ?? ?? ? ?? ??? ? Roll/Pitch/Yaw/??? ?? ?? ?? ??? ?? ?? ?? ??? ? mixer.c ? ?? ???? ??? ?? FRONT_L ?? ??? = (+1xRoll ????) + (-1xPitch ????) + (-1xYaw ????) REAR_L ?? ??? = (+1xRoll ????) + (+1xPitch ????) + (+1xYaw ????) FRONT_R ?? ??? = (-1xRoll ????) + (-1xPitch ????) + (+1xYaw ????) REAR_R ?? ??? = (-1xRoll ????) + (+1xPitch ????) + (-1xYaw ????) static const motorMixer_t mixerQuadX[] = { { 1.0f, -1.0f, 1.0f, -1.0f }, // REAR_R { 1.0f, -1.0f, -1.0f, 1.0f }, // FRONT_R { 1.0f, 1.0f, 1.0f, 1.0f }, // REAR_L { 1.0f, 1.0f, -1.0f, -1.0f }, // FRONT_L }; Throttle Pitch Yaw Roll
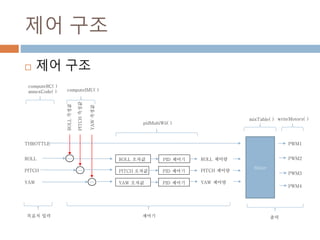
- 37. ?? ?? ? ?? ?? THROTTLE ROLL PITCH YAW ROLL??? PITCH??? YAW??? ROLL ??? PITCH ??? YAW ??? PID ??? PID ??? PID ??? ROLL ??? PITCH ??? YAW ??? Mixer PWM1 PWM2 PWM3 PWM4 ??? ?? ??? ?? computeRC( ) annexCode( ) computeIMU( ) pidMultiWii( ) mixTable( ) writeMotors( )
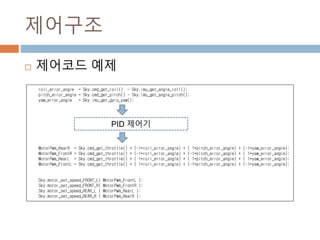
- 38. ???? ? ???? ?? roll_error_angle = Sky.cmd_get_roll() - Sky.imu_get_angle_roll(); pitch_error_angle = Sky.cmd_get_pitch() - Sky.imu_get_angle_pitch(); yaw_error_angle = Sky.imu_get_gyro_yaw(); MotorPwm_RearR = Sky.cmd_get_throttle() + (-1*roll_error_angle) + ( 1*pitch_error_angle) + (-1*yaw_error_angle); MotorPwm_FrontR = Sky.cmd_get_throttle() + (-1*roll_error_angle) + (-1*pitch_error_angle) + ( 1*yaw_error_angle); MotorPwm_RearL = Sky.cmd_get_throttle() + ( 1*roll_error_angle) + ( 1*pitch_error_angle) + ( 1*yaw_error_angle); MotorPwm_FrontL = Sky.cmd_get_throttle() + ( 1*roll_error_angle) + (-1*pitch_error_angle) + (-1*yaw_error_angle); Sky.motor_set_speed_FRONT_L( MotorPwm_FrontL ); Sky.motor_set_speed_FRONT_R( MotorPwm_FrontR ); Sky.motor_set_speed_REAR_L ( MotorPwm_RearL ); Sky.motor_set_speed_REAR_R ( MotorPwm_RearR ); PID ???
- 39. ?????.