












































More Related Content
Similar to Arduino_car_robot_presentation.pptx (20)
Recently uploaded (20)


















Arduino_car_robot_presentation.pptx
- 1. Car obstacle detector Arduino Robot Module :Systems integration Module Code: LIPC 3390 Guide: Presented by:
- 2. Outline ’üĄ Aim and Objectives ’üĄ Introduction ’üĄ List of components ’üĄ Circuit Diagram ’üĄ Arduino Codes ’üĄ The Final Result ’üĄ Conclusion and Observation
- 3. Aim and Objectives Aim ’üĄ To construct a programmable Arduino car robot to detect and measure object Objective ’üĄ To connect various car robot components to Arduino ’üĄ Write a programming code for Ultrasonic sensor, servo motor and motor controller ’üĄ Examine each programmed component
- 4. Introduction ’üĄ This project is meant to demonstrate how a car robot is programmed to move around, also has the features to measure and detect object from distance
- 5. List of components ’üĄ Arduino uno Servo motor SG90
- 6. ŌĆó Double weels ŌĆó DC motor drive SG90
- 7. ŌĆó Male anf female connecting wire ŌĆó L298 motor controller
- 8. ŌĆó Breadboard Ultrasonic sensor (HC-SR04)
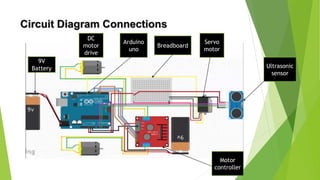
- 9. Hardware Assemble steps ’üĄ Install the two DC motor drive ’üĄ Attach the two double wheels ’üĄ Connect the front smaller wheel ’üĄ Attach ultrasonic sensor to servo motor ’üĄ Attach Arduino uno and motor controller ’üĄ Attach breadboard ’üĄ Complete connections with male and female wires
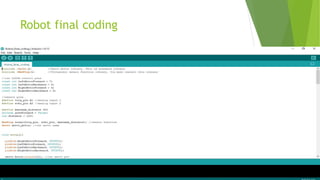
- 12. Programming Steps ’üĄ Download Arduino Uno Software App ’üĄ Declare variables ’üĄ Void setup ’üĄ Void loop ’üĄ Verify code and upload
- 14. Digital pin connections Function Digital pin Left motor forward 7 Left motor backward 6 Right motor forward 4 Right motor backward 5
- 15. Challenges Encountered and solution ’üĄ Wrong pin connection was discovered ’üĄ Issues with importing library ’üĄ Connecting motor controller panel to 5v ’üĄ The issue with servo motor
- 16. The Final Result
- 17. Conclusion and Observation ’üĄ The sensor did not cover or move the entire distance that we suspected at the beginning ’üĄ Understand the concept and the principle of how Arduino works ’üĄ Grasping the working method of the ultrasonic sensor ’üĄ Use variety of the equipment
- 18. References ’üĄ Wang, Z., Lim, E.G., Wang, W., Leach, M. and Man, K.L., 2014, November. Design of an arduino- based smart car. In 2014 International SoC Design Conference (ISOCC) (pp. 175-176). IEEE. ’üĄ Ullah, S., Mumtaz, Z., Liu, S., Abubaqr, M., Mahboob, A. and Madni, H.A., 2019. Single-equipment with multiple-application for an automated robot-car control system. Sensors, 19(3), p.662. ’üĄ Chu, H.C., Chien, M.F., Lin, T.H. and Zhang, Z.J., 2016, July. Design and implementation of an auto- following robot-car system for the elderly. In 2016 International Conference on System Science and Engineering (ICSSE) (pp. 1-4). IEEE. ’üĄ Taha, I.A. and Marhoon, H.M., 2018. Implementation of controlled robot for fire detection and extinguish to closed areas based on Arduino. Telkomnika, 16(2), pp.654-664. ’üĄ Ananda, R. and Amin, M., 2020, August. CONTROL OF A ROBOT CAR WITH TWO COMMANDS VIA HC-05. In International Conference on Social, Sciences and Information Technology (Vol. 1, No. 1, pp. 71-76).