Autonomous Driving, provable safety and scalability design principles - Erez Dagan
ŌĆó
5 likesŌĆó918 views

Erez Dagan, SVP Advanced development and strategy, Mobileye - Workshop on Safety of Automated Vehicles (in collaboration with IRCOBI) - 12 September 2017 - Antwerp, Belgium




![Automated Driving Group 7
Sensing Errors : Drive Safely vs Drive Comfortably
The right measure to judge how well a sensing system approximates reality is by its impact on the policy.
We have established that any policyŌĆÖs safety depends on :
(1) Rejecting non-cautious actions
(2) defaulting to DEP if no cautious action exists.
Hence, a sensing error is a defined to be safety critical - only if it leads to either:
(1) Approval of a non-cautious action. (ŌĆśmissŌĆÖ)
(2) Unnecessary DEP. (ŌĆśghostŌĆÖ)
Sensing errors that lead to neither of the above - would merely compromise the drive-comfort.
[We further show that securing ŌĆśsemantic accuracyŌĆÖ of a sensor - is sufficient for optimizing the drive comfort.]](https://image.slidesharecdn.com/euroncap-20thanniversary-erezdagan-170927080840/85/Autonomous-Driving-provable-safety-and-scalability-design-principles-Erez-Dagan-7-320.jpg)

















































More Related Content
Similar to Autonomous Driving, provable safety and scalability design principles - Erez Dagan (20)
More from Euro NCAP (9)







Recently uploaded (20)




















Autonomous Driving, provable safety and scalability design principles - Erez Dagan
- 1. Autonomous Driving provable safety and scalability design principles Erez Dagan SVP Advanced development and Strategy. Mobileye, an intel company.
- 2. Automated Driving Group 2 Autonomous driving holds a promise of huge public safety and societal efficiency benefits. However, our automated mobility solutions must be provably safe and economically-scalable to deliver on that promise - a socially acceptable and marketable ŌĆśdrive-anywhereŌĆÖ proposition. Introduction
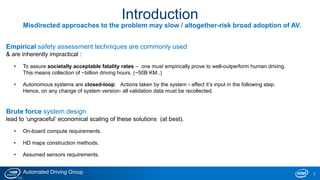
- 3. Automated Driving Group 3 Introduction Misdirected approaches to the problem may slow / altogether-risk broad adoption of AV. Empirical safety assessment techniques are commonly used & are inherently impractical : ŌĆó To assure societally acceptable fatality rates ŌĆō one must empirically prove to well-outperform human driving. This means collection of ~billion driving hours. (~50B KM..) ŌĆó Autonomous systems are closed-loop: Actions taken by the system - affect itŌĆÖs input in the following step. Hence, on any change of system version- all validation data must be recollected. Brute force system design lead to ŌĆśungracefulŌĆÖ economical scaling of these solutions (at best). ŌĆó On-board compute requirements. ŌĆó HD maps construction methods. ŌĆó Assumed sensors requirements.
- 4. Automated Driving Group 4 ScalabilitySafety Driving Policy Environment Sensing Introduction The following slides 1. Present a formal safety model (RSS) - enforceable on any AV driving policy module. 2. Deduce a formal disambiguation of safety-critical sensing errors from errors causing drive comfort issues. 3. Outline our architecture, leveraging RSS compliance into scalability. RSS model Blame semantics 1 Critical errors ŌĆō safety PAC system ŌĆō comfort Error semantics 2 Efficient Q CV Sensing Mapping/Fusion action semantics Env. model semantics 3 fused sensing system: tractable validation Efficient RSS compliance check
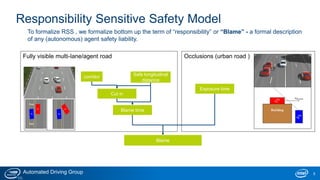
- 5. Automated Driving Group 5 Responsibility Sensitive Safety Model To formalize RSS , we formalize bottom up the term of ŌĆ£responsibilityŌĆØ or ŌĆ£BlameŌĆØ - a formal description of any (autonomous) agent safety liability. corridor Safe longitudinal distance Cut in Blame time Blame Exposure time Fully visible multi-lane/agent road Occlusions (urban road )
- 6. Automated Driving Group 6 We propose (and prove) that by applying a certain, temporally-local constraint on any policy - ItŌĆÖs RSS adherence may be secured. For that we further define : ŌĆō Default Emergency Policy (DEP) : well-specified default maneuver. ŌĆō Safe state - assures safe execution of DEP (up to our blame) ŌĆō Cautious command - if the next state it leads-to is a safe state. And prove : Any policy that Secures itŌĆÖs RSS into the future, accounting for any possible ŌĆśbutterfly effectsŌĆÖ Cautious command Safe state DEP Blame Any Policy action Execute action Null? Execute DEP . Reject action ŌĆ£CautiousŌĆØ? Estimated state 1. Executes only ŌĆścautiousŌĆÖ commands 2. Defaults to DEP when no ŌĆścautiousŌĆÖ command exist Responsibility Sensitive Safety - put to practice
- 7. Automated Driving Group 7 Sensing Errors : Drive Safely vs Drive Comfortably The right measure to judge how well a sensing system approximates reality is by its impact on the policy. We have established that any policyŌĆÖs safety depends on : (1) Rejecting non-cautious actions (2) defaulting to DEP if no cautious action exists. Hence, a sensing error is a defined to be safety critical - only if it leads to either: (1) Approval of a non-cautious action. (ŌĆśmissŌĆÖ) (2) Unnecessary DEP. (ŌĆśghostŌĆÖ) Sensing errors that lead to neither of the above - would merely compromise the drive-comfort. [We further show that securing ŌĆśsemantic accuracyŌĆÖ of a sensor - is sufficient for optimizing the drive comfort.]
- 8. Automated Driving Group 8 ScalabilitySafety Driving Policy Environment Sensing Critical errors ŌĆō safety PAC system ŌĆō comfort RSS model Blame semantics Error semantics 1 2 Efficient Q action semantics 3 a The RSS is applicable to any policy, & in particular ŌĆōto ML policies. - our efficient implementation of policiesŌĆÖ ŌĆ£cautiousness checkŌĆØ is publically available. - We further share our design principle of a scalable policy. Efficient RSS compliance check
- 9. Automated Driving Group 100,000 runs (8 agents placed randomly) 0% accidents 99.8% success running time: 1msec per agent on EyeQ4 Double Lane Merge - ME Policy solution simulated The double lane marge use-case very effectively captures the complexities of HW negotiations. Our SRR-verified policy is applied ŌĆō demonstrating absolute safety, and runtime efficiency
- 10. Automated Driving Group 10 Driving policy ŌĆō tackling the computational challenge Driving policy is a choice of driving action given our perception of the environment. At each point , the next action should be chosen by itŌĆÖs long term effect. ’ā© A computationally explosive problem, even under hard simplifying assumptions commonly used. Common approaches to try to mitigate the problem include: - Discretizing the actions space and simulating all possible options. STILL BIG - Offline pre-calculation of discretized action/state combinations. STILL BIG - Training a module to approximate the long-term effects (of each action, at each state). INHERENTLY HARD Solution : We adopt human-like semantics: Instead of geometric actions : ŌĆ£drive 13.7 meters at the current speed and then accelerate at a rate of 0.8 m/s2 ŌĆØ We formulate semantic actions: ŌĆ£follow the car in front of youŌĆØ or ŌĆ£quickly overtake that car on your leftŌĆØ. Our approach results in: - Reduction of the computational complexity to a hard-upper bound, while covering the ŌĆ£geometricŌĆØ actions-space. - Successful learning of action impacts even further into the future.
- 11. Automated Driving Group Responsibility Sensitive Safety under occlusions The results of applying the ŌĆśblameŌĆÖ extension to cases of occlusions induced by other vehicles.
- 12. Automated Driving Group CV Sensing Mapping/Fusion Env. model semantics b 12 ScalabilitySafety Driving Policy Environment Sensing Critical errors ŌĆō safety PAC system ŌĆō comfort RSS model Efficient Q Blame semantics action semantics Error semantics 1 2 3 fused sensing system: tractable validation Efficient RSS compliance check Having Clearly identified what type of sensing errors are safety-critical ones, leads to: - An effective & scalable perception architecture, not compromising safety aspects. - Optimized fused-system ŌĆścautiousnessŌĆÖ check ’ā© tractable empirical validation.
- 13. Automated Driving Group Covering all Environment model elements : 1. Drivable area boundaries 2. Driving paths geometry 3. Movable obstacles 4. Semantics Visual : Comprehensive Perception Space
- 14. Automated Driving Group Foreground Background Appearance, texture Flow, structure visual inference redundancies Visual : Comprehensive Perception Space
- 15. Automated Driving Group All products, computer systems, dates and figures specified are preliminary based on current expectations, and are subject to change without notice. 15 Multi sensor environment perception : safety and comfort Camera covers: 1. Drivable area boundaries 2. Driving paths geometry 3. Road users 4. Semantics The Perception of the environment is improved and robustified by other sensors : a. Road users and (some) road boundaries may also be sensed by Radar and Lidar. b. Only a dynamic updated map may faithfully convey road geometry and traffic semantics. Any fusion of other sensors may now be designed to serve 2 well-disambiguated goals: - ŌĆ£ImproveŌĆØ : Enhanced drive comfort - ŌĆ£RobustifyŌĆØ: Reduction of safety critical errors We start by reviewing our scalable mapping technology, and then discuss the fusion of map/radar/lidar.
- 16. Automated Driving Group All products, computer systems, dates and figures specified are preliminary based on current expectations, and are subject to change without notice. 1.Harvesting by Single-camera vehicles : vast device proliferation to assure extremely high refresh rates REM: Crowd sourced mapping and localization
- 17. Automated Driving Group 2.Map aggregation in the cloud : ingesting dynamic updates and auto-validation of the cured map REM: Crowd sourced mapping and localization
- 18. Automated Driving Group 3.RB consumption through Self-localization REM: Crowd sourced mapping and localization
- 19. Automated Driving Group 19 Localization and eHorizon under hard visibility Environmental conditions - Rain
- 20. Automated Driving Group RSD Summary ME cloud 1.Send Summary 2. Valuable - Yes/No? 3. Send RSD only if valuable Summary GPS trace (one sample every 15 seconds) + metadata (lighting conditions, visibility, speed etc.) = a mechanism for minimizing bandwidth costs. Economically-aware harvesting: ŌĆ£data pullingŌĆØ system
- 21. Automated Driving Group 21 Road coverage rates/fleet size A fleet of ~15K vehicles will cover ~95% of the motorways (road type 1) on an hourly basis. A fleet of ~1000 vehicles will cover ~98% of the motorways (road type 1) on a daily basis.
- 22. Automated Driving Group CameraŌĆōREM Fusion Producing a 3D model of the environment which preserves the natural semantic accuracy of the visual-space .
- 23. Automated Driving Group 23 Optimizing (Fused) system safety/comfort levels Formally disambiguating safety and comfort aspects - allows more decoupled & verifiable development. Sensor fusion may now also be re-designed to serve 2 formally disambiguated objectives: 1. Enhanced drive comfort Improve the ŌĆścomfortŌĆÖ EM by versatile sensors synergies 2. Reduction of safety critical errors robustify the safety by redundant cautiousness-checks of the different sensors In a Sensor Fusion setup , this disambiguation is further leveraged to make a fused system safety validation tractable : We dramatically reduce (~square-root) the amount of data needed for reaching identical empirical safety assurances by applying Majority function over cautiousness checks executed by 3 quasi-independent sensors. As a result : We may assert socially acceptable levels of solution safety (1B hours MTBF) ŌĆō by collection of ~100K driving hours. Any Policy action Execute action Estimated state Null? Execute DEP . Reject action ŌĆ£CautiousŌĆØ? Cautious(camera)? majority Cautious(Radar)? Cautious(Lidar)? Estimated state - safety comfort
- 24. Automated Driving Group ŌĆó Range estimation : camera + road elevation model / depth sensors ŌĆó Road elevation model (2D’ā©3D) : optic-flow/Lidar-points on the road/ REM ŌĆó Lane detection: camera / REM ŌĆó Free-space: camera (on-road delimiters) /depth sensors (floating objects) Fusion synergies for drive comfort : Examples
- 25. Automated Driving Group 25 ScalabilitySafety Driving Policy Environment Sensing Critical errors ŌĆō safety PAC system ŌĆō comfort RSS model Efficient Q CV Sensing Mapping/Fusion Blame semantics action semantics Error semantics Env. model semantics Summary 1. a formal safety model (RSS) - enforceable on any AV driving policy module. 2. a formal disambiguation of safety-critical sensing errors from errors causing drive comfort issues. 3. Outline of our architecture, leveraging its RSS compliance into scalability of both the sensing and the driving policy systems. 1 2 3 fused sensing system: tractable validation Efficient RSS compliance check https://arxiv.org/pdf/1708.06374.pdf