[CV√„è䪷]Active Object Localization with Deep Reinfocement Learning
6 likes6,408 views

2016/02/06§Àø™¥fl§µ§Ï§ø∞‰≥’√„«øª·£¿Èv∂´°∏±ı∞‰∞‰≥’2015’i§flª·°π∞k±Ì◊ ¡œ§«§π°£

[CV√„è䪷]Active Object Localization with Deep Reinfocement Learning
- 1. µ⁄32ªÿ CV√„è䪷°∏ICCV2015’i§flª·°π Active Object Localization with Deep Reinforcement Learning Ω‘¥®◊ø“≤(takmin)
- 2. ◊‘º∫ΩBΩÈ 2 •∆•Ø•À•´•Î?•Ω•Í•Â©`•∑•Á•Û?•¢©`•≠•∆•Ø•» Ω‘¥® ◊ø“≤£®§fl§ §¨§Ô §ø§Ø§‰£© •’•Í©`•®•Û•∏•À•¢£®•”•∏•Á•Û£¶IT•È•‹£© °∏•≥•Û•‘•Â©`•ø•”•∏•Á•Û√„è䪷£¿Èvñ|°π÷˜¥fl ≤© ø£®π§—ߣ© ¬‘ös£∫ 1999-2003ƒÍ »’±æHP£®··§À•¢•∏•Ï•Û•»?•∆•Ø•Œ•Ì•∏©`§ÿ∑÷…Á£©§À§∆°¢IT•®•Û•∏•À•¢§»§∑§∆•∑•π•∆•‡òã∫B°¢•◊•Í •ª©`•Î•π°¢•◊•Ì•∏•ß•Ø•»•fi•Õ•∏•·•Û•»°¢•µ•›©`•»µ»§ŒòIÑ’§Àèæ ¬ 2004-2009ƒÍ •≥•Û•‘•Â©`•ø•”•∏•Á•Û§Ú”√§§§ø•∑•π•∆•‡/•¢•◊•Í/•µ©`•”•πÈ_∞kµ»§Àèæ ¬ 2007-2010ƒÍ ëc뙡x€”¥Û—ߥۗߑ∫ ··∆⁄≤© ø’n≥çÀ§∆°¢•≥•Û•‘•Â©`•ø•”•∏•Á•Û§Úåüπ• ÖgŒª»°µ√ÕÀ—ß··°¢≤© ø∫≈»°µ√£®2014ƒÍ£© 2009ƒÍ-¨F‘⁄ •’•Í©`•È•Û•π§»§∑§∆°¢•≥•Û•‘•Â©`•ø•”•∏•Á•Û§Œ•≥•Û•µ•Î/—–æø/È_∞kµ»§Àèæ ¬
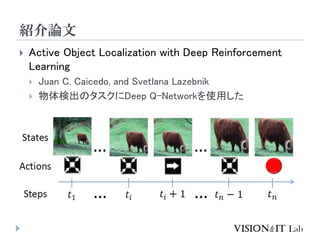
- 3. ΩBΩȒ쌃 ? Active Object Localization with Deep Reinforcement Learning ? Juan C. Caicedo, and Svetlana Lazebnik ? ŒÔÃÂó ≥ˆ§Œ•ø•π•Ø§ÀDeep Q-Network§Ú π”√§∑§ø
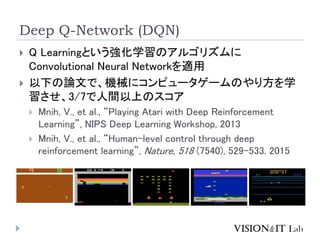
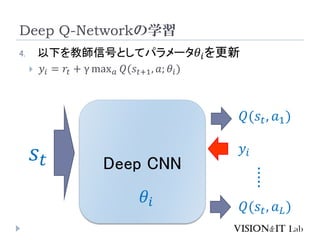
- 4. Deep Q-Network (DQN) ? Q Learning§»§§§¶èäªØ—ߡ琉•¢•Î•¥•Í•∫•‡§À Convolutional Neural Network§Úflm”√ ? “‘œ¬§Œ’쌃§«°¢ôC–µ§À•≥•Û•‘•Â©`•ø•≤©`•‡§Œ§‰§Í∑Ω§Ú—ß ¡ï§µ§ª°¢3/7§«»ÀÈg“‘…œ§Œ•π•≥•¢ ? Mnih, V., et al., °∞Playing Atari with Deep Reinforcement Learning°±, NIPS Deep Learning Workshop, 2013 ? Mnih, V., et al., °∞Human-level control through deep reinforcement learning°±, Nature, 518 (7540), 529®C533. 2015
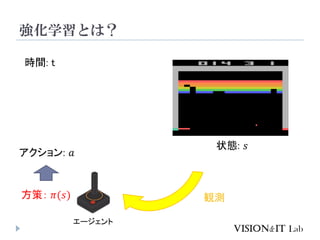
- 6. èäªØ—ߡ炙§œ£ø •®©`•∏•ß•Û•» ◊¥ëB: ? ïrÈg: t •¢•Ø•∑•Á•Û: ? ”Qúy∑Ω≤fl£∫ ?(?)
- 7. èäªØ—ߡ炙§œ£ø •®©`•∏•ß•Û•» ◊¥ëB: ? ïrÈg: t •¢•Ø•∑•Á•Û: ? ”Qúy∑Ω≤fl£∫ ?(?)
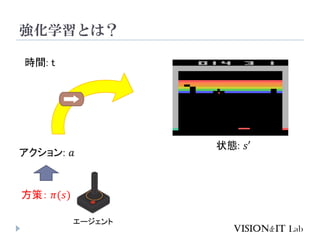
- 8. èäªØ—ߡ炙§œ£ø •®©`•∏•ß•Û•» ïrÈg: t •¢•Ø•∑•Á•Û: ? ∑Ω≤fl£∫ ?(?) ◊¥ëB: ?°‰
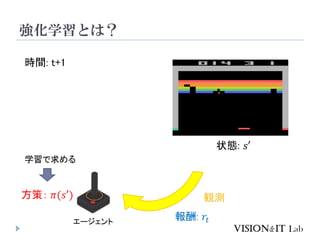
- 9. èäªØ—ߡ炙§œ£ø •®©`•∏•ß•Û•» ◊¥ëB: ?°‰ ïrÈg: t+1 àÛ≥Í: ?? ”Qúy∑Ω≤fl£∫ ?(?°‰) —ߡ匿«Û§·§Î
- 10. èäªØ—ߡ炙§œ£ø ? §…§Œ§Ë§¶§ ∑Ω≤fl§Ú—ß¡ï§π§Î£ø ? “‘œ¬§ŒàÛ≥ͧŒ∫Õ§Œ∆⁄¥˝Ç駨◊Ó¥Û§»§ §Î§Ë§¶§ÀΩÒ§Œ––Ñ”§ÚõQ ∂®§π§Î ?? = ?? + ???+1 + ?2 ??+2 + ? + ? ??? ? ? àÛ≥ͧŒ∫Õ Ω´¿¥§ŒàÛ≥Í úpÀ•¬ ?? (?) = argmax ? ? ??|?? = ?, ? ? = ? ◊¥ëBs§Œïr°¢àÛ≥ͧŒ∫Õ§¨◊Ó¥Û§»§ §Í§Ω§¶§ ––Ñ”a§Úflx§÷
- 11. Q Learning ?? (?, ?) ?? (?) = argmax ? ? ??|?? = ?, ? ? = ? ◊¥ëBs°¢––Ñ”a§ŒΩM§fl∫œ§Ô§ª§Œ¡º§∑êô§∑ §Ú•π•≥•¢§«Ω箧∆§Ø§Ï§ÎÈv ˝ ◊¥ëBs§Œïr°¢àÛ≥ͧŒ∫Õ§¨◊Ó¥Û§»§ §Í§Ω§¶§ ––Ñ”a§Úflx§÷ ◊¥ëBs§«––Ñ”a§Ú§»§√§ø§»§≠°¢§Ω§Œ··◊Óflm§ ––Ñ” §Ú§»§ÍæA§±§øïr§Àµ√§È§Ï§ÎàÛ≥ͧŒ∫Õ§Œ∆⁄¥˝Çé ?§Œ¥˙§Ô§Í§ÀÈv ˝Q§Ú—ß¡ï§π§Î
- 12. Q Learning ?? (?) = argmax ? ?? (?, ?) ?§Œ¥˙§Ô§Í§ÀÈv ˝Q§Ú—ß¡ï§π§Î Èv ˝?§Œ•—•È•·©`•ø?§Ú —ß¡ï§À§Ë§Í«Û§·§Î ?(?, ?; ?? ) ??+1 = ?? ? ??? ? ?(??) —ß¡ï¬ ¥_¬ µƒπ¥≈‰Ωµœ¬∑®(SGD) ìp ßÈv ˝
- 13. Q Learning ?(??) = 1 2 ?? (?, ?) ? ?(?, ?; ??) 2 ΩÃéü–≈∫≈ ¥Ê‘⁄§∑§ §§ ? ìp ßÈv ˝ ??+1 = ?? ? ??? ? ?(??)
- 14. Q Learning ?? = ?? + ???+1 + ?2 ??+2 + ? + ? ??? ? ? ?? = ?? + ???+1 ?? (?, ?) = ? ??|?? = ?, ? ? = ? ?? (?, ?) = ?? + ? max ?°‰ ?? (?°‰, ?°‰) àÛ≥ͧŒ∫Õ ?§À§Ë§√§∆flw “∆§∑§ø◊¥ëB
- 15. Q Learning ?? (?, ?) = ?? + ? max ?°‰ ?? (?°‰, ?°‰) ? ìp ßÈv ˝ ?(??) = 1 2 ?? (?, ?) ? ?(?, ?; ??) 2
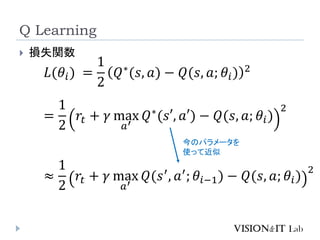
- 16. Q Learning ? ìp ßÈv ˝ = 1 2 ?? + ? max ?°‰ ?? (?°‰, ?°‰) ? ?(?, ?; ??) 2 °÷ 1 2 ?? + ? max ?°‰ ?(?°‰ , ?°‰ ; ???1) ? ?(?, ?; ??) 2 ΩÒ§Œ•—•È•·©`•ø§Ú π§√§∆Ω¸À∆ ?(??) = 1 2 ?? (?, ?) ? ?(?, ?; ??) 2
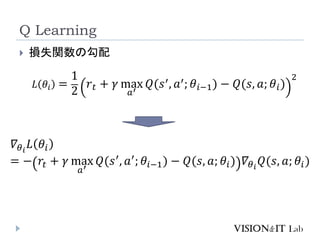
- 17. Q Learning ? ìp ßÈv ˝§Œπ¥≈‰ ?? ? ? ?? = ? ?? + ? max ?°‰ ?(?°‰, ?°‰; ???1) ? ?(?, ?; ??) ?? ? ?(?, ?; ??) ? ?? = 1 2 ? ? + ? max ?°‰ ?(?°‰, ?°‰; ???1) ? ?(?, ?; ??) 2
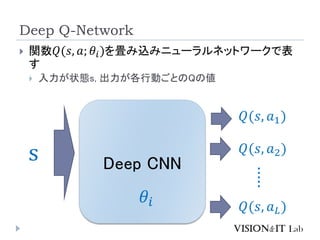
- 18. Deep Q-Network ? Èv ˝ ?(?, ?; ??)§ÚÆí§flfiz§fl•À•Â©`•È•Î•Õ•√•»•Ô©`•Ø§«±Ì §π ? »Î¡¶§¨◊¥ëBs, ≥ˆ¡¶§¨∏˜––Ñ”§¥§»§ŒQ§ŒÇé Deep CNN ?(?, ?1) ?(?, ? ?) ?(?, ?2) ?? ????? s
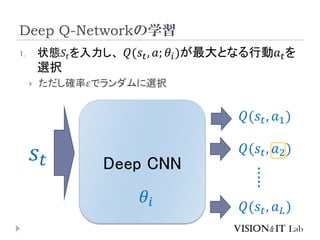
- 19. Deep Q-Network§Œ—ß¡ï 1. ◊¥ëB ??§Ú»Î¡¶§∑°¢ ?(??, ?; ??)§¨◊Ó¥Û§»§ §Î––Ñ”? ?§Ú flxík ? §ø§¿§∑¥_¬ ?§«•È•Û•¿•‡§Àflxík Deep CNN ?(??, ?1) ?(??, ? ?) ?(??, ?2) ?? ????? ??
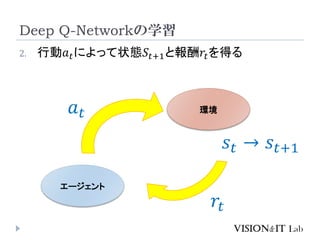
- 20. Deep Q-Network§Œ—ß¡ï 2. ––Ñ”? ?§À§Ë§√§∆◊¥ëB??+1§»àÛ≥Í??§Úµ√§Î ? ? ?? °˙ ??+1 •®©`•∏•ß•Û•» ≠hæ≥ ??
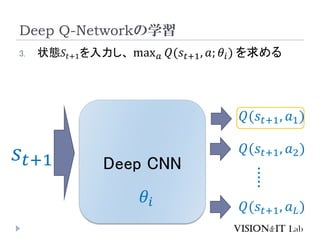
- 21. Deep Q-Network§Œ—ß¡ï 3. ◊¥ëB ??+1§Ú»Î¡¶§∑°¢ max ? ?(??+1, ?; ??) §Ú«Û§·§Î Deep CNN ?(??+1, ?1) ?(??+1, ? ?) ?(??+1, ?2) ?? ????? ??+1
- 22. Deep Q-Network§Œ—ß¡ï 4. “‘œ¬§ÚΩÃéü–≈∫≈§»§∑§∆•—•È•·©`•ø ??§Ú∏¸–¬ ? ?? = ?? + ¶√ max ? ?(??+1, ?; ??) Deep CNN ?(??, ?1) ?(??, ? ?) ?? ?? ????? ??
- 23. §‰§√§»±æÂ
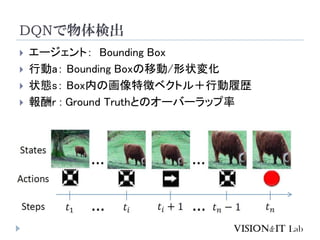
- 24. DQN§«ŒÔÃÂó ≥ˆ ? •®©`•∏•ß•Û•»£∫ Bounding Box ? ––Ñ”a£∫ Bounding Box§Œ“∆Ñ”/–Œ◊¥â‰ªØ ? ◊¥ëBs£∫ Boxƒ⁄§Œª≠œÒÃÿè’•Ÿ•Ø•»•Î£´––Ñ”¬ƒös ? àÛ≥Ír : Ground Truth§»§Œ•™©`•–©`•È•√•◊¬
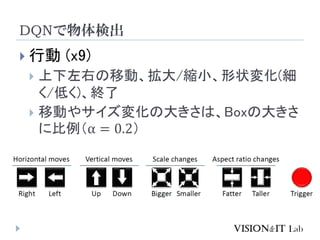
- 25. DQN§«ŒÔÃÂó ≥ˆ ? ––Ñ” (x9) ? …œœ¬◊Û”“§Œ“∆Ñ”°¢íà¥Û/øs–°°¢–Œ◊¥â‰ªØ(ºö §Ø/µÕ§Ø)°¢ΩK¡À ? “∆Ñ”§‰•µ•§•∫≪اŒ¥Û§≠§µ§œ°¢Box§Œ¥Û§≠§µ §À±»¿˝£®¶¡ = 0.2£©
- 26. DQN§«ŒÔÃÂó ≥ˆ ? ◊¥ëB ? Bounding Boxƒ⁄§Œª≠œÒ§´§Èª≠œÒÃÿè’•Ÿ•Ø•»•Î§Ú»°µ√ ? Æí§flfiz§fl•À•Â©`•È•Î•Õ•√•»•Ô©`•Ø§«»°µ√§∑§ø4096¥Œ‘™•Ÿ •Ø•»•Î ? fl^»•§Œ––Ñ”¬ƒös ? ÷±Ω¸10ªÿ§Œ––Ñ”§fi§« ? §Ω§Ï§æ§Ï§Œ––Ñ”§œ°¢9¥Œ‘™•–•§• •Í•Ÿ•Ø•»•Î£®§»§√§ø––Ñ” §Ú1°¢À˚0£© ? 10 x 9 = 90¥Œ‘™•Ÿ•Ø•»•Î ? 4096+90 = 4186¥Œ‘™•Ÿ•Ø•»•Î§ÚDQN§ÿ§Œ»Î¡¶§»§π§Î
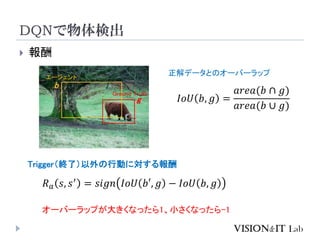
- 27. DQN§«ŒÔÃÂó ≥ˆ ? àÛ≥Í b g ??? ?, ? = ????(? °… ?) ????(? °» ?) ? ? ?, ?°‰ = ???? ??? ?°‰, ? ? ??? ?, ? •®©`•∏•ß•Û•» Ground Truth ’˝Ω‚•«©`•ø§»§Œ•™©`•–©`•È•√•◊ Trigger£®ΩK¡À£©“‘Õ‚§Œ––Ñ”§Àåù§π§ÎàÛ≥Í •™©`•–©`•È•√•◊§¨¥Û§≠§Ø§ §√§ø§È1°¢–°§µ§Ø§ §√§ø§È-1
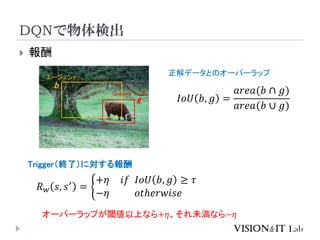
- 28. DQN§«ŒÔÃÂó ≥ˆ ? àÛ≥Í b g ??? ?, ? = ????(? °… ?) ????(? °» ?) •®©`•∏•ß•Û•» Ground Truth ’˝Ω‚•«©`•ø§»§Œ•™©`•–©`•È•√•◊ Trigger£®ΩK¡À£©§Àåù§π§ÎàÛ≥Í •™©`•–©`•È•√•◊§¨ÈìÇé“‘…œ§ §È+?°¢§Ω§ÏŒ¥ú∫§ §È?? ? ? ?, ?°‰ = +? ?? ??? ?, ? °› ? ?? ?????????
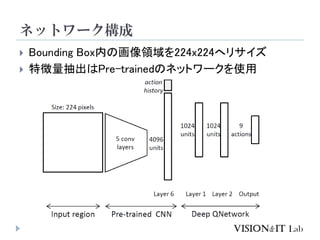
- 29. •Õ•√•»•Ô©`•Øòã≥… ? Bounding Boxƒ⁄§Œª≠œÒÓI”Ú§Ú224x224§ÿ•Í•µ•§•∫ ? Ãÿè’¡ø≥È≥ˆ§œ± ∞˘±-≥Ÿ∞˘≤πæ±≤‘±ªÂ§Œ•Õ•√•»•Ô©`•Ø§Ú π”√
- 30. •®©`•∏•ß•Û•»§Œ—ß¡ï ? ¶≈-greedy•¢•Î•¥•Í•∫•‡ ? ¥_¬ ¶≈§«•È•Û•¿•‡§À––Ñ”§Úflx§÷ ? §Ω§Ï“‘Õ‚§œ◊Ó§‚QÇ駨∏fl§§––Ñ” ? ±æ ÷∑®§«§œ°¢—ß¡ïïr§À’˝Ω‚•«©`•ø§¨§Ô §´§√§∆§§§Î§Œ§«°¢àÛ≥ͧ¨•◊•È•π§À§ §Î––Ñ” §Œ÷–§´§È•È•Û•¿•‡§Àflx§÷ ? ¶≈§œ—ߡ裡flM§‡§À§ƒ§Ï§∆–°§µ§Ø§∑§∆§§§Ø
- 31. •®©`•∏•ß•Û•»§Œ—ß¡ï ? Experience Replay ? fl^»•§Œ(??, ? ?, ??, ??+1)§Úreplay-memory§À±£ ¥Ê ? DQN§Œ—ß¡ïïr°¢±£¥Ê§∑§øreplay-memory§´ §È•È•Û•¿•‡§Àflx§Û§«•fl•À•–•√•¡§À§∑§∆‘Ÿ—ß¡ï
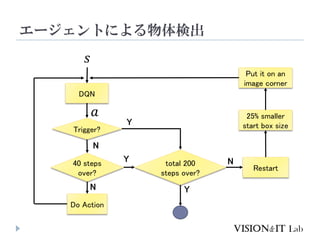
- 32. •®©`•∏•ß•Û•»§À§Ë§ÎŒÔÃÂó ≥ˆ Trigger? DQN ? ? Restart 40 steps over? total 200 steps over? 25% smaller start box size Put it on an image corner Do Action Y Y Y N N N
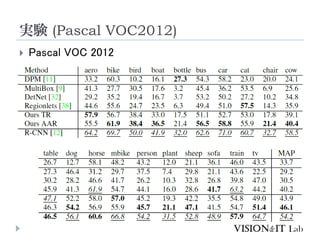
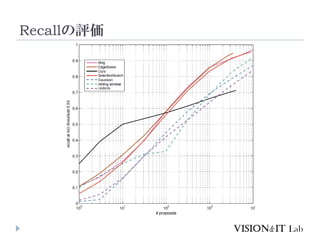
- 33. ågÚY (Pascal VOC2007) ? Pascal VOC 2007
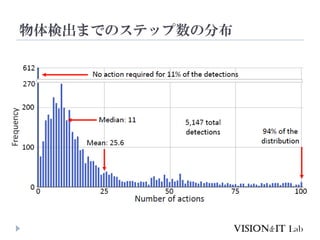
- 36. ––∂جƒös§Œ¿˝
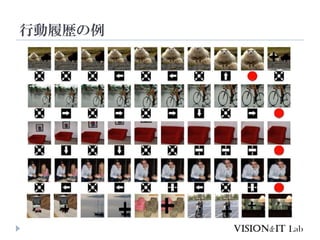
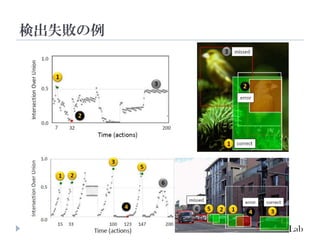
- 37. ∏¥ ˝ŒÔÃÂó ≥ˆ§Œ¿˝
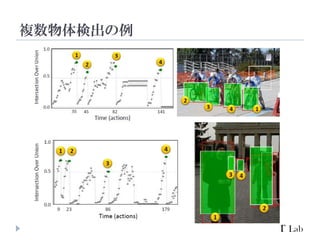
- 38. ó ≥ˆ ß∞‹§Œ¿˝
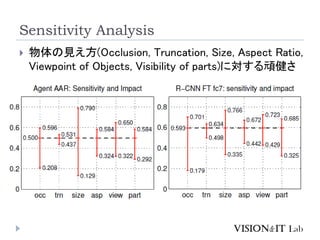
- 39. Sensitivity Analysis ? ŒÔ猓䧮∑Ω(Occlusion, Truncation, Size, Aspect Ratio, Viewpoint of Objects, Visibility of parts)§Àåù§π§ÎÓBΩ°§µ
- 40. Runtime ?K-40 GPU “ªÃ® ?CNN§À§Ë§ÎÃÿè’≥È≥ˆ (4.5 ms) ?Q-network (3.2 ms) ?∆Ωæ˘ 1.54sec/image
- 41. ΩY’ì ? èäªØ—ß¡ï§Ú”√§§§∆°¢Top-Down§«ŒÔÃÂó ≥ˆ§Ú ––§¶ ÷∑®§Ú÷∞∏ ? “ª§ƒ§Œ•™•÷•∏•ß•Ø•»§Àåù§∑11§´§È25§Ø§È§§§ŒÓI ”Ú§∑§´“ä§∆§§§ §Ø§∆§‚ó ≥ˆ§«§≠§ø ? Ω´¿¥µƒ§À§œ ? §‚§¶…Ÿ§∑•´•∆•¥•Í§Úâ৉§∑§∆§fl§ø§§ ? •Õ•√•»•Ô©`•Ø§Ú…ӧا∑§∆§fl§ø§§ ? Pre-trained§ •‚•«•Î§«§œ§ §Øend-to-end§«ª≠œÒÃÿ è’¡ø§Ú—ß¡ï§∑§ø§§