Interactive perceptionú¿IPú®: ÑÝÑ▄Ñ├Ñ╚ñ╬ͬÊÖñ╦Úvñ╣ñÙÐð¥┐¢B¢Ú
1 like1,085 views

Physical human-robot interaction (pHRI)ñ╦Úvñ╣ñÙÍÏʬñ╩ÊòÁÒñ╦ñ─ñññã┐╝ñ¿ñÙñ┐ñßñ╬ıô╬─ı{û╦░k▒Ý╗ß┘Y┴¤ñÃñ╣ú«îg┐ıÚgñÃ╗¯äËñ╣ñÙÑÝÑ▄Ñ├Ñ╚ñ╬Ðð¥┐ñ╦Ê█┴óñ─ͬÊèñ‗¢ÔıhñÀñÌñ╣ú«
![Interactive perceptionú¿IPú®: ÑÝÑ▄Ñ├Ñ╚ñ╬ͬÊÖñ╦ñ¬ñ▒ñÙ┼d╬Â╔¯ññÑóÑÎÑÝ®`Ñ┴
[1] Bohg, J., et al. "Interactive perception: Leveraging action in perception and perception in action", IEEE Transactions on Robotics, Vol.33,
No.6, pp.1273-1291, 2017.
[2] Atkeson, C. et al., "No falls, no resets: Reliable humanoid behaviour in the DARPA robotics challenge", 15th IEEE/RAS International Conference Humanoid
Robots, pp. 623¿C630, 2015.
[3] Johnson, M. et al., "Team IHMCí»s lessons learned from the DARPA robotics challenge trials", Journal of Field Robotics, Vol. 32, No. 2, pp. 192¿C208, 2015.
[4] Held, R. and Hein, A., "Movement-produced stimulation in the development of visually guided behaviour", J. Comparative Physiol. Psychol., Vol.56,
pp.872¿C876, 1963.
[5] Gibson, J. J., "The Senses Considered as Perceptual Systems", Houghton Mif?in, 1966.
░k▒Ýı▀ú║ ┤¾┌µ┤¾Ðº╩»³\Ðð¥┐╩Ê ▓®╩┐ßßã┌ın│╠ú│─Û ãÍ¥«¢í┤╬
Posture sensor ?(?)
Ñ╗ѾÑÁÃÚê¾
?(?)
ððäËÑÐÑÚÑß®`Ñ┐
└²ú®ÑÔ®`Ñ┐│÷┴ªÁ╚
ÑÝÑ▄Ñ├Ñ╚ñ¼ððäËñ╣ñÙñ│ñ╚ñáh¥│ñ‗▓┘θñÀí©ËÞ£yí╣ñõí©ıJÎRí╣ñ╦▒Ïʬñ╩ÃÚê¾ñ‗─▄äËÁ─ñ╦Á├ñÙ
Ñ╗ѾÑÁÃÚê¾(S(t))ñ╚ððäË
ÑÐÑÚÑß®`Ñ┐(A(t))ñ‗¢Mñ▀
║¤ñ´ñ╗(Sí┴Aí┴t)ú¼ËÞ£yñõ
ıJÎRñ‗╚¦ÊÎñ╦ñ╣ñÙ
ıô╬─ı{û╦░k▒Ý╗ß┘Y┴¤ Ã░¥Ä í½Physical human-robot interaction (pHRI)ñ╦Úvñ╣ñÙÍÏʬñ╩ÊòÁÒñ╦ñ─ñññã┐╝ñ¿ñÙí½](https://image.slidesharecdn.com/d3interactiveperception-220927090646-6a91c861/85/Interactive-perception-IP-1-320.jpg)
![í±╔·╗¯┐ıÚgñÃñ¤ËÞ£y└ºÙyñ╩¢Ë┤Ññ¼▒▄ñ▒ñÚñýñ╩ññ
ñ¤ñ©ñßñ╦ú║╔·╗¯ñ╬Íðñ╬¢Ë┤ÑÑ┐Ñ╣Ñ»
1/14
ó┘ ¡h¥│ñ╚ñ╬¤Ó╗ÑθË├
ñ╦ñÞñÙͬÊÖ
ó┌ ═Ô┬Êñ╦îØñ╣ñÙÂÓÿö
ñ╩¢Ë┤ÑÅÛ┤
¢±╗Ïñ╬─┌╚¦
(IP)
┤╬╗Ïñ╬─┌╚¦
(VSM)
¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ñ‗┐╝æ]ñ╣ñÙñ╚ú¼ñ¢ñªñÃñ╩ññê÷║¤ñ╚
▒╚¦^ñÀñãÂÓÿöñ╩╚Ù┴ª▒ݼFñ¼Á├ñÚñýñÙ
í· Í¬ÊÖ=¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ñ╦ñÞñ├ñã┤┘▀MñÁñýñÙ
í· ıJÎRñ╬¥½Â╚ñõ╦┘Â╚ñ¼╔¤ñ¼ñÙñ╩ñ╔ñ╬ä┐╣¹ñ¼ã┌┤²](https://image.slidesharecdn.com/d3interactiveperception-220927090646-6a91c861/85/Interactive-perception-IP-2-320.jpg)
![©┼ʬú║
Interactive perception (IP)ú║
ó┘ ÑÝÑ▄Ñ├Ñ╚ñ╬ͬÊÖñ╦ñ¬ñ▒ñÙ¢³─ÛÎó─┐ñÁñýñãñññÙÑó
ÑÎÑÝ®`Ñ┴ñ╬ñÊñ╚ñ─ú¿Darpa Robotics Challenge │÷ê÷ı▀ñÚñÔIPñ‗
╗¯Ë├ñ╣ñÙñ│ñ╚ñÃñÞñÛ©▀ññÎÈ┬╔ðÈñ‗│Íñ┐ñ╗ñÙñ│ñ╚ñ¼ñÃñ¡ñÙñ╚Îó─┐[2][3]ú®
ó┌ Ñ╗ѾÑÁÃÚê¾(S(t))ñ╚ÑóÑ»Ñ┴ÑÕÑ¿®`Ñ┐ÃÚê¾(A(t))ñ‗¢M
ñ▀║¤ñ´ñ╗ñã(Sí┴Aí┴t), ËÞ£yñõıJÎRñ‗╚¦ÊÎñ╦ñ╣ñÙ
IPñ╬ÍÏʬñ╩ÑóÑÎÑÛÑ▒®`ÑÀÑþѾñ╬©┼ʬñ‗ıh├¸
Interactive perception: Leveraging action in perception
and perception in action[1]ú¿Bohg, J., et al. 2017)
3/14
[1] Bohg, J., et al. "Interactive perception: Leveraging action in perception and perception in action", IEEE Transactions on Robotics, Vol.33, No.6, pp.1273-1291, 2017. [2]
Atkeson, C. et al., "No falls, no resets: Reliable humanoid behavior in the DARPA robotics challenge", 15th IEEE/RAS International Conference Humanoid Robots, pp. 623¿C
630, 2015.[3] Johnson, M. et al., "Team IHMCí»s lessons learned from the DARPA robotics challenge trials", Journal of Field Robotics, Vol. 32, No. 2, pp. 192¿C208, 2015.
Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017).
Posture sensor
?(?)
Ñ╗ѾÑÁÃÚê¾
?(?)
ððäËÑÐÑÚÑß®`Ñ┐
└²ú®ÑÔ®`Ñ┐│÷┴ªÁ╚](https://image.slidesharecdn.com/d3interactiveperception-220927090646-6a91c861/85/Interactive-perception-IP-4-320.jpg)
![©┼ʬú║
Interactive perception (IP)ú║
ó┘ ÑÝÑ▄Ñ├Ñ╚ñ╬ͬÊÖñ╦ñ¬ñ▒ñÙ¢³─ÛÎó─┐ñÁñýñãñññÙÑó
ÑÎÑÝ®`Ñ┴ñ╬ñÊñ╚ñ─ú¿Darpa Robotics Challenge │÷ê÷ı▀ñÚñÔIPñ‗
╗¯Ë├ñ╣ñÙñ│ñ╚ñÃñÞñÛ©▀ññÎÈ┬╔ðÈñ‗│Íñ┐ñ╗ñÙñ│ñ╚ñ¼ñÃñ¡ñÙñ╚Îó─┐[2][3]ú®
ó┌ Ñ╗ѾÑÁÃÚê¾(S(t))ñ╚ÑóÑ»Ñ┴ÑÕÑ¿®`Ñ┐ÃÚê¾(A(t))ñ‗¢M
ñ▀║¤ñ´ñ╗ñã(Sí┴Aí┴t), ËÞ£yñõıJÎRñ‗╚¦ÊÎñ╦ñ╣ñÙ
IPñ╬ÍÏʬñ╩ÑóÑÎÑÛÑ▒®`ÑÀÑþѾñ╬©┼ʬñ‗ıh├¸
Interactive perception: Leveraging action in perception
and perception in action[1]ú¿Bohg, J., et al. 2017)
3/14
[1] Bohg, J., et al. "Interactive perception: Leveraging action in perception and perception in action", IEEE Transactions on Robotics, Vol.33, No.6, pp.1273-1291, 2017. [2]
Atkeson, C. et al., "No falls, no resets: Reliable humanoid behavior in the DARPA robotics challenge", 15th IEEE/RAS International Conference Humanoid Robots, pp. 623¿C
630, 2015.[3] Johnson, M. et al., "Team IHMCí»s lessons learned from the DARPA robotics challenge trials", Journal of Field Robotics, Vol. 32, No. 2, pp. 192¿C208, 2015.
Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017).
Posture sensor
?(?)
Ñ╗ѾÑÁÃÚê¾
?(?)
ððäËÑÐÑÚÑß®`Ñ┐
└²ú®ÑÔ®`Ñ┐│÷┴ªÁ╚
[2] Atkeson, C. et al. [3] Johnson, M. et al.](https://image.slidesharecdn.com/d3interactiveperception-220927090646-6a91c861/85/Interactive-perception-IP-5-320.jpg)
![╚╦ñ‗║¼ñÓäË╬´ñ╬ͬÊÖ?ıJÎRú¢IPñ╬ñÞñªñ╩ú¼ÑñѾÑ┐ÑÚÑ»ÑãÑúÑÍñ╩╠¢╦¸Á─ñ╩ÑÎÑÝÑ╗Ñ╣
╔·╬´ÐºÁ─ñ╩ͬÊÖÑÎÑÝÑ╗Ñ╣(1/2) [4]ú¿Held, R. & Hein, A., 1963)
4/14
[4] Held, R. and Hein, A., "Movement-produced stimulation in the development of visually guided behaviour", J. Comparative Physiol. Psychol.,
Vol.56, pp.872¿C876, 1963.
Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017).
Ñ┤ѾÑ╔ÑÚÑ═Ñ│ñ╚ÎÈË╔ÊãäËÑ═Ñ│
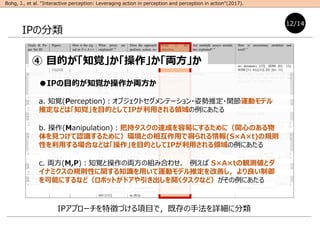
Heldñ╬îg‗Y [4]ú║
╠§╝■ú®ıQ╔·òrñ½ñÚ░ÁÚ£ñ╬ÍðñÃ˲ñãñ┐═¼©╣ñ╬ÎËÑ═Ñ│5îØ
(A,B)ñ¼Üiñ▒ñÙñÞñªñ╦ñ╩ñÙñ╬ñ‗┤²ñ┴╠Ï╩Ôñ╩ÊòÊÖ¢U‗Yñ‗ËÙñ¿ñÙ
? Añ¤ÎÈÀÍñ╬ÎÒñÃÜiñññã┐ıÚg─┌ñ‗ÊãäËú¿─▄äËÁ─ú®
? Bñ¤Añ╬äËñ¡ñ╦ÅÛñ©ñãäËñ»Ñ┤ѾÑ╔ÑÚñ╦ü\ñ╗ÊãäËú¿╩▄äËÁ─ú®
í¨¢U‗Yñ╣ñÙÊòÊÖ┤╠╝ññ¤═¼ñ©
¢Y╣¹ú®Bñ╦ñÔÜiñ»─▄┴ªñ¼ñóñÙñ╦ñÔÚvñ´ñÚñ║í©╔·┤µñ╦▓╗┐╔ÃÀñ╩
ÊòÊÖððäËí╣ñ¼ÊèñÚñýñ╩ñ½ñ├ñ┐í·í©Êèñ¿í╣ñ¼ð╬│╔ñÁñýñãñññ╩ññ
í¨Î┼ÁÏÎ╦ä¦íóÊòÊÖÁ─Ð┬╗Ï▒▄íó╦▓─┐À┤╔õñ╩ñ╔
í·─▄äËÁ─ñ╦╠Õñ‗äËñ½ñÀ¡h¥│ñ╚ÑñѾÑ┐ÑÚÑ»ÑÀÑþѾñ╣ñÙÊò
ÊÖ╠Õ‗Yñ¼▒Ïʬú¿╠Õñ╬äËñ¡ñ╚í©Êèñ¿í╣ñ╬ëõ╗»ñ╬Ê‗╣¹ú®
ıJÎRñ╦ñ¬ñññãí©ÎÈñÚ¡h¥│ñ‗ëõñ¿ñÙäËñ¡ú¿─▄äËÁ─ñ╩╠¢
╦¸ððäËú®í╣ñ½ñÚÁ├ñÚñýñÙÃÚê¾ñ│ñ¢Î¯ñÔ▒¥┘|Á─ñ╩ÃÚê¾
çÝ (Yuji, I., 2017)
A
B](https://image.slidesharecdn.com/d3interactiveperception-220927090646-6a91c861/85/Interactive-perception-IP-6-320.jpg)
![╚╦ñ‗║¼ñÓäË╬´ñ╬ͬÊÖ?ıJÎRú¢IPñ╬ñÞñªñ╩ú¼ÑñѾÑ┐ÑÚÑ»ÑãÑúÑÍñ╩╠¢╦¸Á─ñ╩ÑÎÑÝÑ╗Ñ╣
5/14
[5] Gibson, J. J., "The Senses Considered as Perceptual Systems", Houghton Mif?in, 1966.
Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017).
▓╗ÊÄätñ╩ð╬Î┤ñ╬╬´╠Õñ╬╝»║¤
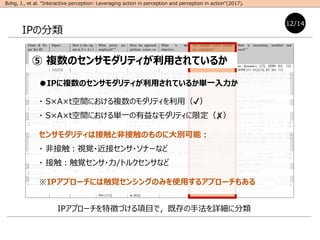
Gibsonñ╬îg‗Y [5]ú║
Ñ┐Ñ╣Ñ»ú®▒╗‗Yı▀ñÚñ¼ËÊçÝñ╬ñÞñªñ╩▓╗ÊÄätñ╩ð╬Î┤ñ╬╚²┤╬Ȭ
╬´╠Õñ╬╝»║¤ñ╬Íðñ½ñÚ╗¨£╩╬´╠Õñ‗Êèñ─ñ▒ñÙ
¢Y╣¹ú®
? ╗¡¤±ñ╬ñ▀▒Ý╩¥ú║㢥¨¥½Â╚49úÑ
? ╗¡¤±ñ‗╗Ï▄×┐╔─▄ú║㢥¨¥½Â╚72úÑ
? ╬´╠Õñ‗╩ÍñÃ┤ÑñÙñ│ñ╚ñ¼┐╔─▄ú║㢥¨¥½Â╚99úÑ
í·îؤ¾ñ╚ñ╬╬´└ÝÁ─ÑñѾÑ┐ÑÚÑ»ÑÀÑþѾñ¼Í¬ÊÖäI└Ýñ‗Í·ÚL
╔·╬´ÐºÁ─ñ╩ͬÊÖÑÎÑÝÑ╗Ñ╣(2/2) [5]ú¿Gibson, J. J., 1966)
╗¨£╩╬´╠Õñ╬└²
í±╔·╬´ÐºÁ─ñ╩ͬÊÖ í· í©ÊòÊÖÁ─ñ╩ıJÎRí╣ñ╚í©┤ÑÊÖñ╦ñÞñÙ╠¢╦¸í╣ñ╬ÚvéSñ‗¢U‗YÁ─ñ╦└Ý¢ÔñÀͬÊÖ
í±Ñ│ѾÑÈÑÕ®`Ñ┐ÑËÑ©ÑþѾ í· ╩┬Ã░ͬÎRñõÿöí®ñ╩üó¿ñ‗└¹Ë├ñÀ╗¡¤±ñ╦ÊÔ╬©Âñ▒ñ‗ððñª
í¨Pascal VOC ú¼ImageNet ú¼Microsoft COCO ñ╩ñ╔íó╩²╩«═‗ñ╬ÊÔ╬©Âñ▒ñÁñýñ┐┤¾┴┐ñ╬Ñî`Ñ┐Ñ╗Ñ├Ñ╚ñÃ│╔╣ª
í±ÑÝÑ▄Ñ├Ñ╚ÑËÑ©ÑþѾ í· ¡h¥│─┌ñ‗ÊãäËñÀñã╬´└ÝÁ─ñ╦¤Ó╗ÑθË├ñ╣ñÙͬÊÖ í· IP
┤ÑñÙððäËñÃͬÊÖñ¼¤‗╔¤](https://image.slidesharecdn.com/d3interactiveperception-220927090646-6a91c861/85/Interactive-perception-IP-7-320.jpg)
![ÑñѾÑ┐ÑÚÑ»ÑãÑúÑÍ?ÑЮ`Ñ╗ÑÎÑÀÑþѾú¿IPú®: ÑÝÑ▄Ñ├Ñ╚ͬÊÖñ╦ñ¬ñ▒ñÙ¢³─Ûñ╬ÑóÑÎÑÝ®`Ñ┴ñ‗░³║¼ñ╣ñÙ©┼─¯
í· ¡h¥│ñ╚ñ╬ñóñÚñµñÙÀN¯Éñ╬¤Ó╗ÑθË├ñ‗╗¯Ë├ñÀͬÊÖñ‗àg╝â╗»?Åè╗»ñÀêÈ└╬ñ╩▓┘θ?ððäËñ‗îg¼F
í±¤Ó╗ÑθË├ú║ó┘Ñ¿®`ѩѺѾÑ╚ñ╬ÊãäË ó┌¡h¥│ñ╚ñ╬¢Ë┤Ñ
└²ú®¢┼╩¢?▄ç¦åÊãäËú»Ñ╔Ñóñ╬Ú_Ú]?╬´╠Õñ‗Ð║ñ╣?┤┼┴ªí¡
í±IPñ╬ÑßÑÛÑ├Ñ╚ú║
ú▒ú®ÂÓÿöñ╩©ðÊÖ╚Ù┴ªð┼║┼ñ╬╔·│╔ú¿Create Novel Signals ú║CNSú®
í· ┤ÑÊÖ?ʶ╔¨?ÊòÊÖÑî`Ñ┐ú¼Ñ¬ÑÍѩѺѻÑ╚ñ╬ÍÏñÁ?▒Ý├µñ╬▓─┘|?äéðÈí¡
ú▓ú®Ñ╗ѾÑÁÃÚê¾ñ╚ððäËÑÐÑÚÑß®`Ñ┐ñ‗¢Mñ▀║¤ñ´ñ╗ñ┐ıJÎRú¿Action Perception Regularity ú║APRú®
í· òrÚgt?Ñ╗ѾÑÁÃÚê¾S?ððäËÑÐÑÚÑß®`Ñ┐Añ╬¢Y║¤┐ıÚgú¿Sí┴Aí┴tú®ñ╦ñ¬ñ▒ñÙÊÄätðÈñ‗к┴ò
í· ñóñÙ¡h¥│¤┬ñ╦ñ¬ñ▒ñÙððäËñ╚Ñ╗ѾÑÁÀ┤ÅÛñ╬Ê‗╣¹ÚvéSñ‗└Ý¢Ôñ╣ñÙñ│ñ╚ñ╦îØÅÛ
í· ñ│ñ╬ͬÎRñ‗└¹Ë├ñ╣ñÙñ│ñ╚ñ╦ñÞñÛí©ËÞ£yí╣ñ╚í©ıJÎRí╣ñ¼ñÞñÛ║åàgñ½ñ─êÈ└╬ñ╦ñ╩ñÙ
ÑÝÑ▄Ñ├Ñ╚ñ¼¡h¥│ñ‗▓┘θñÀí©ËÞ£yí╣ñõí©ıJÎRí╣ñ╦▒Ïʬñ╩ÃÚê¾ñ‗─▄äËÁ─ñ╦Á├ñÙñ│ñ╚ñ¼Í¸ñ╩─┐Á─
6/14
Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017).
ÑñѾÑ┐ÑÚÑ»ÑãÑúÑÍ?ÑЮ`Ñ╗ÑÎÑÀÑþѾ(IP)ú║¤Ó╗ÑθË├ñ‗╗¯Ë├ñÀñ┐ıJÎR](https://image.slidesharecdn.com/d3interactiveperception-220927090646-6a91c861/85/Interactive-perception-IP-8-320.jpg)
![ó┘ Sensorless Manipulationú║Ñ╗ѾÑÀѾÑ░ñ‗▒Ïʬñ╚ñÀñ╩ññÑóÑÎÑÝ®`Ñ┴
í· ¡h¥│ñ½ñÚ╩▄ñ▒ñÙÅÛ┤ñ‗┐╝æ]ñ╗ñ║Ñ╗ѾÑÁñ½ñÚñ╬ÑıÑú®`Ñ╔ÑðÑ├Ñ»ñ╩ñÀñ╦Ѭ®`ÑÎѾÑÙ®`ÑÎñÃ▓┘θ
ó┌ Perception of Visual Dataú║¥▓Í╣╗¡¤±?ÑËÑÃѬ?╦¹ñ╬ÊòÊÖÑî`Ñ┐ñ╬¢Ôßï?ıJÎR
í· Ñ│ѾÑÈÑÕ®`Ñ┐ÑËÑ©ÑþѾñ╬ÑóÑÎÑÝ®`Ñ┴ñ╬┤¾▓┐ÀÍñ¤╔·╬´ñõÑÝÑ▄Ñ├Ñ╚ñ╬ıJÎRñ╬─▄äËÁ─ñ╩ðÈ┘|ñ‗═Û╚½ñ╦ƒoÊò
ó█ Active Perceptionú║ͬÊÖ?ıJÎRñ╬ñ┐ñßñ╬Ñî`Ñ┐╚íÁ├ÑÎÑÝÑ╗Ñ╣ñ╦ͬÁ─ñ╩æÚ┬Èñ‗îº╚Ù
í· Ñ¿®`ѩѺѾÑ╚ñ¼í©ñ╩ñ╝ñ¢ñ╬Ñî`Ñ┐ñ¼▒Ïʬñ½í╣ñ‗ͬñ├ñãñ¬ñÛ┤╬ñ╦╚íÁ├ñ╣ñÙͬÊÖÑî`Ñ┐ñ‗▀xÆkú¿▓╗┤_îgðÈ£pú®
í· ñ¢ñ╬ͬÊÖÑî`Ñ┐ñ‗ñññ─ñ╔ñ│ñÃ╚íÁ├ñ╣ñÙñ½ñ‗øQ¿ñ╣ñÙ─▄äËÁ─ñ╩ͬÊÖ
í±APñ╚IPñ╬▓¯«É(IPñ╦ñ¤ÊȤ┬ñ╬ðÈ┘|ñ¼ñóñÙ)
1) ╬´└ÝÁ─¤Ó╗ÑθË├ñ╦ñÞñÛÁ├ñÚñýñÙÃÚê¾ñ‗║¼ñÓ
ú¿ÍÏ┴┐?▒Ý├µ┤ÍñÁ?Ë▓Â╚ñ╩ñ╔ñ╬╬´╠Õ╠ÏðÈú®
2) Êèñ¿À¢ñ└ñ▒ñÃñ╩ñ»¡h¥│ñ¢ñ╬ñÔñ╬ñ‗ëõ╗»ñÁñ╗ñÙ
ó▄ Active Haptic Perceptionú║
¡h¥│ñ╚ñ╬¢Ë┤Ñú¿┤ÑÊÖÃÚê¾ú®ñ‗╗¯Ë├ñÀñ┐ıJÎR
í·ð╬Î┤ıJÎR?Î╦ä¦═ã¿?▒Ý├µ┤ÍñÁıJÎRñ╩ñ╔í¡
í·¡h¥│ñ╬ëõ╗»ÎÈ╠Õñ¼─┐Á─ñÃñ╩ñññ¼IPñ╬Ê╗▓┐
IPñ╚╦¹ñ╬ͬÊÖÑóÑÎÑÝ®`Ñ┴ñ╬Úv▀Bú«Fñ¤¡h¥│ñ‗▓┘θñ╣ñÙú¼
?Fñ¤©ðÊÖÎ░Í├ñ╬ÑÐÑÚÑß®`Ñ┐ñ╬ñ▀▓┘θñ╣ñÙÑóÑ»ÑÀÑþѾ
7/14
ÑÝÑ▄Ñ├Ñ╚ͬÊÖñ╦ñ¬ñ▒ñÙIPñ╬╬╗Í├ñ┼ñ▒
Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017).
S í┴ A í┴ t
S í┴ A í┴ t
S í┴ t
S
A í┴ t
S í┴ A í┴ t](https://image.slidesharecdn.com/d3interactiveperception-220927090646-6a91c861/85/Interactive-perception-IP-9-320.jpg)
![Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017).
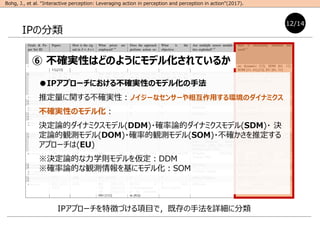
IPñ╬ÅÛË├└²ú║ó█Ñ└ÑñÑ╩Ñ▀Ñ»Ñ╣к┴òñ╚╬´ðÈ═ã¿
IPñ╦ñÞñÛ╬´╠Õñ╬┤ÑÊÖñ¬ñÞñËæTðÈ╠ÏðÈñ‗═ã¿ñ╣ñÙñ╚ñññªın¯}ñ╦ñÔ┤¾ñ¡ñ╩▀Mı╣
ó┘ ÊòÁÒëõ©³┐╔─▄ ó┌╚╦ñ¼Ð║ñ╣ ó█ÑÝÑ▄Ñ├Ñ╚ñ¼Ð║ñ╣
åû¯}ÈO¿ú®Ñã®`ÑÍÑÙñ╦Í├ñ½ñýñ┐Ã‗╠ÕÍÏ┴┐ñ‗ÑÝÑ▄Ñ├Ñ╚ñ¼═ã¿
í¨ÑÝÑ▄Ñ├Ñ╚ñ¼ [Ð║ñÀÌzñ▀┴ª?Ã‗ñ¼ÊãäËñÀñ┐¥ÓÙx?Ã‗ñ╬ÍÏ┴┐] ñ╬ÚvéSñ‗ͬñ├ñãñññÙñ╚üó¿(╩┬Ã░ͬÎR)
ó┘ ═Û╚½ñ╩ÑÐÑ├ÑÀÑÍѬÑÍÑ®`Ñðú║æTðÈ╠ÏðÈñ╬═ã¿ñ¤▓╗┐╔─▄
ó┌ ÑÝÑ▄Ñ├Ñ╚ñ¼¡h¥│ñ╚ÑñѾÑ┐ÑÚÑ»ÑÀÑþѾñ╣ñÙäeñ╬Ñ¿®`ѩѺѾÑ╚ñ‗ËQ▓ýú║▓╗┤_ñ½ñ╩═ã¿éÄ
í· ¤Ó╗ÑθË├ñ╦ñÞñÙÂÓÿöñ╩©ðÊÖÑÀÑ░Ñ╩ÑÙú¿CNSú®ñ└ñ▒ñÃñ¤═ã¿ñÃñ¡ñ╩ññ└²ú║Ð║ñÀñ┐┴ªñ╬ÃÚê¾ñ╬ÃÀ╚þ
ó█ ÑÝÑ▄Ñ├Ñ╚ñ¼ÎÈ┬╔Á─ñ╦▒Ïʬñ╩©ðÊÖÃÚê¾ñ‗╔·│╔ñ╣ñÙñ│ñ╚ñ¼┐╔─▄ú║ı²ñÀññæTðÈ╠ÏðÈñ‗═ã¿┐╔─▄
í· Sí┴Aí┴tñ╬ÊÄätðÈñ╦ñ─ñññãñ╬═ãıôú¿APRú®ñ╦ñÞñÛÁ├ñÚñýñ┐ͬÎRú¿ÑÝÑ▄Ñ├Ñ╚ñ¼Ã‗╠Õñ‗Ð║ñÀñ┐
ÅèñÁú®ñ╦ñÞñÛú¼Ã‗╠Õñ╬æTðÈ╠ÏðÈú¿ÍÏ┴┐ú®ñ‗═ã¿ñ╣ñÙñ│ñ╚ñ¼ñÃñ¡ñÙ
äé╠Õ(RO)ñ½ú┐ëõð╬┐╔─▄(DO)ñ½ú┐
rigid objects
deformable
11/14
ú┐
ÍÏññ?
¦Xññ?
ú┐
Ð║ñÀñ┐┴ªñ¼ÀÍñ½ñÚñ╩ñññ½ñÚ
ñ╩ñ¾ñ╚ñÔñññ¿ñ╩ññ???
!
ñ│ñýñ└ñ▒ñ╬┴ªñÃÐ║ñ╗ñðñ│ñýñ└ñ▒ÊãäË
ñÀñ┐ñ╬ñ└ñ½ñÚÃ‗ñ╬ÍÏñÁñ¤øQñÌñÛñ└úí](https://image.slidesharecdn.com/d3interactiveperception-220927090646-6a91c861/85/Interactive-perception-IP-14-320.jpg)

Interactive perceptionú¿IPú®: ÑÝÑ▄Ñ├Ñ╚ñ╬ͬÊÖñ╦Úvñ╣ñÙÐð¥┐¢B¢Ú
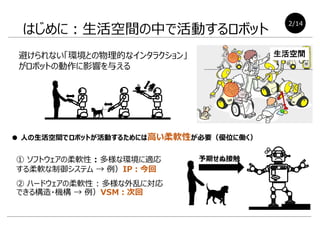
- 1. Interactive perceptionú¿IPú®: ÑÝÑ▄Ñ├Ñ╚ñ╬ͬÊÖñ╦ñ¬ñ▒ñÙ┼d╬Â╔¯ññÑóÑÎÑÝ®`Ñ┴ [1] Bohg, J., et al. "Interactive perception: Leveraging action in perception and perception in action", IEEE Transactions on Robotics, Vol.33, No.6, pp.1273-1291, 2017. [2] Atkeson, C. et al., "No falls, no resets: Reliable humanoid behaviour in the DARPA robotics challenge", 15th IEEE/RAS International Conference Humanoid Robots, pp. 623¿C630, 2015. [3] Johnson, M. et al., "Team IHMCí»s lessons learned from the DARPA robotics challenge trials", Journal of Field Robotics, Vol. 32, No. 2, pp. 192¿C208, 2015. [4] Held, R. and Hein, A., "Movement-produced stimulation in the development of visually guided behaviour", J. Comparative Physiol. Psychol., Vol.56, pp.872¿C876, 1963. [5] Gibson, J. J., "The Senses Considered as Perceptual Systems", Houghton Mif?in, 1966. ░k▒Ýı▀ú║ ┤¾┌µ┤¾Ðº╩»³\Ðð¥┐╩Ê ▓®╩┐ßßã┌ın│╠ú│─Û ãÍ¥«¢í┤╬ Posture sensor ?(?) Ñ╗ѾÑÁÃÚê¾ ?(?) ððäËÑÐÑÚÑß®`Ñ┐ └²ú®ÑÔ®`Ñ┐│÷┴ªÁ╚ ÑÝÑ▄Ñ├Ñ╚ñ¼ððäËñ╣ñÙñ│ñ╚ñáh¥│ñ‗▓┘θñÀí©ËÞ£yí╣ñõí©ıJÎRí╣ñ╦▒Ïʬñ╩ÃÚê¾ñ‗─▄äËÁ─ñ╦Á├ñÙ Ñ╗ѾÑÁÃÚê¾(S(t))ñ╚ððäË ÑÐÑÚÑß®`Ñ┐(A(t))ñ‗¢Mñ▀ ║¤ñ´ñ╗(Sí┴Aí┴t)ú¼ËÞ£yñõ ıJÎRñ‗╚¦ÊÎñ╦ñ╣ñÙ ıô╬─ı{û╦░k▒Ý╗ß┘Y┴¤ Ã░¥Ä í½Physical human-robot interaction (pHRI)ñ╦Úvñ╣ñÙÍÏʬñ╩ÊòÁÒñ╦ñ─ñññã┐╝ñ¿ñÙí½
- 2. í±╔·╗¯┐ıÚgñÃñ¤ËÞ£y└ºÙyñ╩¢Ë┤Ññ¼▒▄ñ▒ñÚñýñ╩ññ ñ¤ñ©ñßñ╦ú║╔·╗¯ñ╬Íðñ╬¢Ë┤ÑÑ┐Ñ╣Ñ» 1/14 ó┘ ¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ ñ╦ñÞñÙͬÊÖ ó┌ ═Ô┬Êñ╦îØñ╣ñÙÂÓÿö ñ╩¢Ë┤ÑÅÛ┤ ¢±╗Ïñ╬─┌╚¦ (IP) ┤╬╗Ïñ╬─┌╚¦ (VSM) ¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ñ‗┐╝æ]ñ╣ñÙñ╚ú¼ñ¢ñªñÃñ╩ññê÷║¤ñ╚ ▒╚¦^ñÀñãÂÓÿöñ╩╚Ù┴ª▒ݼFñ¼Á├ñÚñýñÙ í· Í¬ÊÖ=¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ñ╦ñÞñ├ñã┤┘▀MñÁñýñÙ í· ıJÎRñ╬¥½Â╚ñõ╦┘Â╚ñ¼╔¤ñ¼ñÙñ╩ñ╔ñ╬ä┐╣¹ñ¼ã┌┤²
- 3. í± ╚╦ñ╬╔·╗¯┐ıÚgñÃÑÝÑ▄Ñ├Ñ╚ñ¼╗¯äËñ╣ñÙñ┐ñßñ╦ñ¤©▀ññ╚ß▄øðÈñ¼▒Ïʬú¿â×╬╗ñ╦âPñ»ú® ▒▄ñ▒ñÚñýñ╩ññí©¡h¥│ñ╚ñ╬╬´└ÝÁ─ñ╩ÑñѾÑ┐ÑÚÑ»ÑÀÑþѾí╣ ñ¼ÑÝÑ▄Ñ├Ñ╚ñ╬äËθñ╦Ë░Ýæñ‗ËÙñ¿ñÙ ËÞã┌ñ╗ñ╠¢Ë┤Ñ ╔·╗¯┐ıÚg ó┌ Ѥ®`Ñ╔ѪѺÑóñ╬╚ß▄øðÈ : ÂÓÿöñ╩═Ô┬Êñ╦îØÅÛ ñÃñ¡ñÙÿïÈý?ÖCÿï í· └²ú®VSMú║┤╬╗Ï ó┘ Ñ¢ÑıÑ╚ѪѺÑóñ╬╚ß▄øðÈ : ÂÓÿöñ╩¡h¥│ñ╦▀mÅÛ ñ╣ñÙ╚ß▄øñ╩Íã˨ÑÀÑ╣ÑãÑÓ í· └²ú®IPú║¢±╗Ï ñ¤ñ©ñßñ╦ú║╔·╗¯┐ıÚgñ╬ÍðñÃ╗¯äËñ╣ñÙÑÝÑ▄Ñ├Ñ╚ 2/14
- 4. ©┼ʬú║ Interactive perception (IP)ú║ ó┘ ÑÝÑ▄Ñ├Ñ╚ñ╬ͬÊÖñ╦ñ¬ñ▒ñÙ¢³─ÛÎó─┐ñÁñýñãñññÙÑó ÑÎÑÝ®`Ñ┴ñ╬ñÊñ╚ñ─ú¿Darpa Robotics Challenge │÷ê÷ı▀ñÚñÔIPñ‗ ╗¯Ë├ñ╣ñÙñ│ñ╚ñÃñÞñÛ©▀ññÎÈ┬╔ðÈñ‗│Íñ┐ñ╗ñÙñ│ñ╚ñ¼ñÃñ¡ñÙñ╚Îó─┐[2][3]ú® ó┌ Ñ╗ѾÑÁÃÚê¾(S(t))ñ╚ÑóÑ»Ñ┴ÑÕÑ¿®`Ñ┐ÃÚê¾(A(t))ñ‗¢M ñ▀║¤ñ´ñ╗ñã(Sí┴Aí┴t), ËÞ£yñõıJÎRñ‗╚¦ÊÎñ╦ñ╣ñÙ IPñ╬ÍÏʬñ╩ÑóÑÎÑÛÑ▒®`ÑÀÑþѾñ╬©┼ʬñ‗ıh├¸ Interactive perception: Leveraging action in perception and perception in action[1]ú¿Bohg, J., et al. 2017) 3/14 [1] Bohg, J., et al. "Interactive perception: Leveraging action in perception and perception in action", IEEE Transactions on Robotics, Vol.33, No.6, pp.1273-1291, 2017. [2] Atkeson, C. et al., "No falls, no resets: Reliable humanoid behavior in the DARPA robotics challenge", 15th IEEE/RAS International Conference Humanoid Robots, pp. 623¿C 630, 2015.[3] Johnson, M. et al., "Team IHMCí»s lessons learned from the DARPA robotics challenge trials", Journal of Field Robotics, Vol. 32, No. 2, pp. 192¿C208, 2015. Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). Posture sensor ?(?) Ñ╗ѾÑÁÃÚê¾ ?(?) ððäËÑÐÑÚÑß®`Ñ┐ └²ú®ÑÔ®`Ñ┐│÷┴ªÁ╚
- 5. ©┼ʬú║ Interactive perception (IP)ú║ ó┘ ÑÝÑ▄Ñ├Ñ╚ñ╬ͬÊÖñ╦ñ¬ñ▒ñÙ¢³─ÛÎó─┐ñÁñýñãñññÙÑó ÑÎÑÝ®`Ñ┴ñ╬ñÊñ╚ñ─ú¿Darpa Robotics Challenge │÷ê÷ı▀ñÚñÔIPñ‗ ╗¯Ë├ñ╣ñÙñ│ñ╚ñÃñÞñÛ©▀ññÎÈ┬╔ðÈñ‗│Íñ┐ñ╗ñÙñ│ñ╚ñ¼ñÃñ¡ñÙñ╚Îó─┐[2][3]ú® ó┌ Ñ╗ѾÑÁÃÚê¾(S(t))ñ╚ÑóÑ»Ñ┴ÑÕÑ¿®`Ñ┐ÃÚê¾(A(t))ñ‗¢M ñ▀║¤ñ´ñ╗ñã(Sí┴Aí┴t), ËÞ£yñõıJÎRñ‗╚¦ÊÎñ╦ñ╣ñÙ IPñ╬ÍÏʬñ╩ÑóÑÎÑÛÑ▒®`ÑÀÑþѾñ╬©┼ʬñ‗ıh├¸ Interactive perception: Leveraging action in perception and perception in action[1]ú¿Bohg, J., et al. 2017) 3/14 [1] Bohg, J., et al. "Interactive perception: Leveraging action in perception and perception in action", IEEE Transactions on Robotics, Vol.33, No.6, pp.1273-1291, 2017. [2] Atkeson, C. et al., "No falls, no resets: Reliable humanoid behavior in the DARPA robotics challenge", 15th IEEE/RAS International Conference Humanoid Robots, pp. 623¿C 630, 2015.[3] Johnson, M. et al., "Team IHMCí»s lessons learned from the DARPA robotics challenge trials", Journal of Field Robotics, Vol. 32, No. 2, pp. 192¿C208, 2015. Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). Posture sensor ?(?) Ñ╗ѾÑÁÃÚê¾ ?(?) ððäËÑÐÑÚÑß®`Ñ┐ └²ú®ÑÔ®`Ñ┐│÷┴ªÁ╚ [2] Atkeson, C. et al. [3] Johnson, M. et al.
- 6. ╚╦ñ‗║¼ñÓäË╬´ñ╬ͬÊÖ?ıJÎRú¢IPñ╬ñÞñªñ╩ú¼ÑñѾÑ┐ÑÚÑ»ÑãÑúÑÍñ╩╠¢╦¸Á─ñ╩ÑÎÑÝÑ╗Ñ╣ ╔·╬´ÐºÁ─ñ╩ͬÊÖÑÎÑÝÑ╗Ñ╣(1/2) [4]ú¿Held, R. & Hein, A., 1963) 4/14 [4] Held, R. and Hein, A., "Movement-produced stimulation in the development of visually guided behaviour", J. Comparative Physiol. Psychol., Vol.56, pp.872¿C876, 1963. Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). Ñ┤ѾÑ╔ÑÚÑ═Ñ│ñ╚ÎÈË╔ÊãäËÑ═Ñ│ Heldñ╬îg‗Y [4]ú║ ╠§╝■ú®ıQ╔·òrñ½ñÚ░ÁÚ£ñ╬ÍðñÃ˲ñãñ┐═¼©╣ñ╬ÎËÑ═Ñ│5îØ (A,B)ñ¼Üiñ▒ñÙñÞñªñ╦ñ╩ñÙñ╬ñ‗┤²ñ┴╠Ï╩Ôñ╩ÊòÊÖ¢U‗Yñ‗ËÙñ¿ñÙ ? Añ¤ÎÈÀÍñ╬ÎÒñÃÜiñññã┐ıÚg─┌ñ‗ÊãäËú¿─▄äËÁ─ú® ? Bñ¤Añ╬äËñ¡ñ╦ÅÛñ©ñãäËñ»Ñ┤ѾÑ╔ÑÚñ╦ü\ñ╗ÊãäËú¿╩▄äËÁ─ú® í¨¢U‗Yñ╣ñÙÊòÊÖ┤╠╝ññ¤═¼ñ© ¢Y╣¹ú®Bñ╦ñÔÜiñ»─▄┴ªñ¼ñóñÙñ╦ñÔÚvñ´ñÚñ║í©╔·┤µñ╦▓╗┐╔ÃÀñ╩ ÊòÊÖððäËí╣ñ¼ÊèñÚñýñ╩ñ½ñ├ñ┐í·í©Êèñ¿í╣ñ¼ð╬│╔ñÁñýñãñññ╩ññ í¨Î┼ÁÏÎ╦ä¦íóÊòÊÖÁ─Ð┬╗Ï▒▄íó╦▓─┐À┤╔õñ╩ñ╔ í·─▄äËÁ─ñ╦╠Õñ‗äËñ½ñÀ¡h¥│ñ╚ÑñѾÑ┐ÑÚÑ»ÑÀÑþѾñ╣ñÙÊò ÊÖ╠Õ‗Yñ¼▒Ïʬú¿╠Õñ╬äËñ¡ñ╚í©Êèñ¿í╣ñ╬ëõ╗»ñ╬Ê‗╣¹ú® ıJÎRñ╦ñ¬ñññãí©ÎÈñÚ¡h¥│ñ‗ëõñ¿ñÙäËñ¡ú¿─▄äËÁ─ñ╩╠¢ ╦¸ððäËú®í╣ñ½ñÚÁ├ñÚñýñÙÃÚê¾ñ│ñ¢Î¯ñÔ▒¥┘|Á─ñ╩ÃÚê¾ çÝ (Yuji, I., 2017) A B
- 7. ╚╦ñ‗║¼ñÓäË╬´ñ╬ͬÊÖ?ıJÎRú¢IPñ╬ñÞñªñ╩ú¼ÑñѾÑ┐ÑÚÑ»ÑãÑúÑÍñ╩╠¢╦¸Á─ñ╩ÑÎÑÝÑ╗Ñ╣ 5/14 [5] Gibson, J. J., "The Senses Considered as Perceptual Systems", Houghton Mif?in, 1966. Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). ▓╗ÊÄätñ╩ð╬Î┤ñ╬╬´╠Õñ╬╝»║¤ Gibsonñ╬îg‗Y [5]ú║ Ñ┐Ñ╣Ñ»ú®▒╗‗Yı▀ñÚñ¼ËÊçÝñ╬ñÞñªñ╩▓╗ÊÄätñ╩ð╬Î┤ñ╬╚²┤╬Ȭ ╬´╠Õñ╬╝»║¤ñ╬Íðñ½ñÚ╗¨£╩╬´╠Õñ‗Êèñ─ñ▒ñÙ ¢Y╣¹ú® ? ╗¡¤±ñ╬ñ▀▒Ý╩¥ú║㢥¨¥½Â╚49úÑ ? ╗¡¤±ñ‗╗Ï▄×┐╔─▄ú║㢥¨¥½Â╚72úÑ ? ╬´╠Õñ‗╩ÍñÃ┤ÑñÙñ│ñ╚ñ¼┐╔─▄ú║㢥¨¥½Â╚99úÑ í·îؤ¾ñ╚ñ╬╬´└ÝÁ─ÑñѾÑ┐ÑÚÑ»ÑÀÑþѾñ¼Í¬ÊÖäI└Ýñ‗Í·ÚL ╔·╬´ÐºÁ─ñ╩ͬÊÖÑÎÑÝÑ╗Ñ╣(2/2) [5]ú¿Gibson, J. J., 1966) ╗¨£╩╬´╠Õñ╬└² í±╔·╬´ÐºÁ─ñ╩ͬÊÖ í· í©ÊòÊÖÁ─ñ╩ıJÎRí╣ñ╚í©┤ÑÊÖñ╦ñÞñÙ╠¢╦¸í╣ñ╬ÚvéSñ‗¢U‗YÁ─ñ╦└Ý¢ÔñÀͬÊÖ í±Ñ│ѾÑÈÑÕ®`Ñ┐ÑËÑ©ÑþѾ í· ╩┬Ã░ͬÎRñõÿöí®ñ╩üó¿ñ‗└¹Ë├ñÀ╗¡¤±ñ╦ÊÔ╬©Âñ▒ñ‗ððñª í¨Pascal VOC ú¼ImageNet ú¼Microsoft COCO ñ╩ñ╔íó╩²╩«═‗ñ╬ÊÔ╬©Âñ▒ñÁñýñ┐┤¾┴┐ñ╬Ñî`Ñ┐Ñ╗Ñ├Ñ╚ñÃ│╔╣ª í±ÑÝÑ▄Ñ├Ñ╚ÑËÑ©ÑþѾ í· ¡h¥│─┌ñ‗ÊãäËñÀñã╬´└ÝÁ─ñ╦¤Ó╗ÑθË├ñ╣ñÙͬÊÖ í· IP ┤ÑñÙððäËñÃͬÊÖñ¼¤‗╔¤
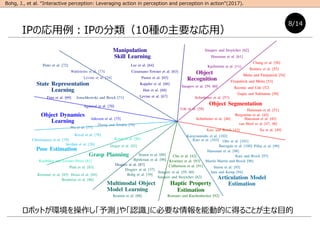
- 8. ÑñѾÑ┐ÑÚÑ»ÑãÑúÑÍ?ÑЮ`Ñ╗ÑÎÑÀÑþѾú¿IPú®: ÑÝÑ▄Ñ├Ñ╚ͬÊÖñ╦ñ¬ñ▒ñÙ¢³─Ûñ╬ÑóÑÎÑÝ®`Ñ┴ñ‗░³║¼ñ╣ñÙ©┼─¯ í· ¡h¥│ñ╚ñ╬ñóñÚñµñÙÀN¯Éñ╬¤Ó╗ÑθË├ñ‗╗¯Ë├ñÀͬÊÖñ‗àg╝â╗»?Åè╗»ñÀêÈ└╬ñ╩▓┘θ?ððäËñ‗îg¼F í±¤Ó╗ÑθË├ú║ó┘Ñ¿®`ѩѺѾÑ╚ñ╬ÊãäË ó┌¡h¥│ñ╚ñ╬¢Ë┤Ñ └²ú®¢┼╩¢?▄ç¦åÊãäËú»Ñ╔Ñóñ╬Ú_Ú]?╬´╠Õñ‗Ð║ñ╣?┤┼┴ªí¡ í±IPñ╬ÑßÑÛÑ├Ñ╚ú║ ú▒ú®ÂÓÿöñ╩©ðÊÖ╚Ù┴ªð┼║┼ñ╬╔·│╔ú¿Create Novel Signals ú║CNSú® í· ┤ÑÊÖ?ʶ╔¨?ÊòÊÖÑî`Ñ┐ú¼Ñ¬ÑÍѩѺѻÑ╚ñ╬ÍÏñÁ?▒Ý├µñ╬▓─┘|?äéðÈí¡ ú▓ú®Ñ╗ѾÑÁÃÚê¾ñ╚ððäËÑÐÑÚÑß®`Ñ┐ñ‗¢Mñ▀║¤ñ´ñ╗ñ┐ıJÎRú¿Action Perception Regularity ú║APRú® í· òrÚgt?Ñ╗ѾÑÁÃÚê¾S?ððäËÑÐÑÚÑß®`Ñ┐Añ╬¢Y║¤┐ıÚgú¿Sí┴Aí┴tú®ñ╦ñ¬ñ▒ñÙÊÄätðÈñ‗к┴ò í· ñóñÙ¡h¥│¤┬ñ╦ñ¬ñ▒ñÙððäËñ╚Ñ╗ѾÑÁÀ┤ÅÛñ╬Ê‗╣¹ÚvéSñ‗└Ý¢Ôñ╣ñÙñ│ñ╚ñ╦îØÅÛ í· ñ│ñ╬ͬÎRñ‗└¹Ë├ñ╣ñÙñ│ñ╚ñ╦ñÞñÛí©ËÞ£yí╣ñ╚í©ıJÎRí╣ñ¼ñÞñÛ║åàgñ½ñ─êÈ└╬ñ╦ñ╩ñÙ ÑÝÑ▄Ñ├Ñ╚ñ¼¡h¥│ñ‗▓┘θñÀí©ËÞ£yí╣ñõí©ıJÎRí╣ñ╦▒Ïʬñ╩ÃÚê¾ñ‗─▄äËÁ─ñ╦Á├ñÙñ│ñ╚ñ¼Í¸ñ╩─┐Á─ 6/14 Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). ÑñѾÑ┐ÑÚÑ»ÑãÑúÑÍ?ÑЮ`Ñ╗ÑÎÑÀÑþѾ(IP)ú║¤Ó╗ÑθË├ñ‗╗¯Ë├ñÀñ┐ıJÎR
- 9. ó┘ Sensorless Manipulationú║Ñ╗ѾÑÀѾÑ░ñ‗▒Ïʬñ╚ñÀñ╩ññÑóÑÎÑÝ®`Ñ┴ í· ¡h¥│ñ½ñÚ╩▄ñ▒ñÙÅÛ┤ñ‗┐╝æ]ñ╗ñ║Ñ╗ѾÑÁñ½ñÚñ╬ÑıÑú®`Ñ╔ÑðÑ├Ñ»ñ╩ñÀñ╦Ѭ®`ÑÎѾÑÙ®`ÑÎñÃ▓┘θ ó┌ Perception of Visual Dataú║¥▓Í╣╗¡¤±?ÑËÑÃѬ?╦¹ñ╬ÊòÊÖÑî`Ñ┐ñ╬¢Ôßï?ıJÎR í· Ñ│ѾÑÈÑÕ®`Ñ┐ÑËÑ©ÑþѾñ╬ÑóÑÎÑÝ®`Ñ┴ñ╬┤¾▓┐ÀÍñ¤╔·╬´ñõÑÝÑ▄Ñ├Ñ╚ñ╬ıJÎRñ╬─▄äËÁ─ñ╩ðÈ┘|ñ‗═Û╚½ñ╦ƒoÊò ó█ Active Perceptionú║ͬÊÖ?ıJÎRñ╬ñ┐ñßñ╬Ñî`Ñ┐╚íÁ├ÑÎÑÝÑ╗Ñ╣ñ╦ͬÁ─ñ╩æÚ┬Èñ‗îº╚Ù í· Ñ¿®`ѩѺѾÑ╚ñ¼í©ñ╩ñ╝ñ¢ñ╬Ñî`Ñ┐ñ¼▒Ïʬñ½í╣ñ‗ͬñ├ñãñ¬ñÛ┤╬ñ╦╚íÁ├ñ╣ñÙͬÊÖÑî`Ñ┐ñ‗▀xÆkú¿▓╗┤_îgðÈ£pú® í· ñ¢ñ╬ͬÊÖÑî`Ñ┐ñ‗ñññ─ñ╔ñ│ñÃ╚íÁ├ñ╣ñÙñ½ñ‗øQ¿ñ╣ñÙ─▄äËÁ─ñ╩ͬÊÖ í±APñ╚IPñ╬▓¯«É(IPñ╦ñ¤ÊȤ┬ñ╬ðÈ┘|ñ¼ñóñÙ) 1) ╬´└ÝÁ─¤Ó╗ÑθË├ñ╦ñÞñÛÁ├ñÚñýñÙÃÚê¾ñ‗║¼ñÓ ú¿ÍÏ┴┐?▒Ý├µ┤ÍñÁ?Ë▓Â╚ñ╩ñ╔ñ╬╬´╠Õ╠ÏðÈú® 2) Êèñ¿À¢ñ└ñ▒ñÃñ╩ñ»¡h¥│ñ¢ñ╬ñÔñ╬ñ‗ëõ╗»ñÁñ╗ñÙ ó▄ Active Haptic Perceptionú║ ¡h¥│ñ╚ñ╬¢Ë┤Ñú¿┤ÑÊÖÃÚê¾ú®ñ‗╗¯Ë├ñÀñ┐ıJÎR í·ð╬Î┤ıJÎR?Î╦ä¦═ã¿?▒Ý├µ┤ÍñÁıJÎRñ╩ñ╔í¡ í·¡h¥│ñ╬ëõ╗»ÎÈ╠Õñ¼─┐Á─ñÃñ╩ñññ¼IPñ╬Ê╗▓┐ IPñ╚╦¹ñ╬ͬÊÖÑóÑÎÑÝ®`Ñ┴ñ╬Úv▀Bú«Fñ¤¡h¥│ñ‗▓┘θñ╣ñÙú¼ ?Fñ¤©ðÊÖÎ░Í├ñ╬ÑÐÑÚÑß®`Ñ┐ñ╬ñ▀▓┘θñ╣ñÙÑóÑ»ÑÀÑþѾ 7/14 ÑÝÑ▄Ñ├Ñ╚ͬÊÖñ╦ñ¬ñ▒ñÙIPñ╬╬╗Í├ñ┼ñ▒ Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). S í┴ A í┴ t S í┴ A í┴ t S í┴ t S A í┴ t S í┴ A í┴ t
- 10. ÑÝÑ▄Ñ├Ñ╚ñ¼¡h¥│ñ‗▓┘θñÀí©ËÞ£yí╣ñõí©ıJÎRí╣ñ╦▒Ïʬñ╩ÃÚê¾ñ‗─▄äËÁ─ñ╦Á├ñÙñ│ñ╚ñ¼Í¸ñ╩─┐Á─ 8/14 Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). IPñ╬ÅÛË├└²ú║IPñ╬ÀͯÉú¿10ÀNñ╬͸ʬñ╩ÅÛË├ú®
- 11. ÑÝÑ▄Ñ├Ñ╚ñ¼¡h¥│ñ‗▓┘θñÀí©ËÞ£yí╣ñõí©ıJÎRí╣ñ╦▒Ïʬñ╩ÃÚê¾ñ‗─▄äËÁ─ñ╦Á├ñÙñ│ñ╚ñ¼Í¸ñ╩─┐Á─ 8/14 Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). IPñ╬ÅÛË├└²ú║IPñ╬ÀͯÉú¿10ÀNñ╬͸ʬñ╩ÅÛË├ú® ó┘ѬÑÍѩѺѻÑ╚Ñ╗Ñ░ÑßѾÑã®`ÑÀÑþѾ ó┌▀\äËÑÔÑÃÑÙñ╬═ã¿ ó█Ñ└ÑñÑ╩Ñ▀Ñ»Ñ╣к┴òñ╚╬´ðÈ═ã¿
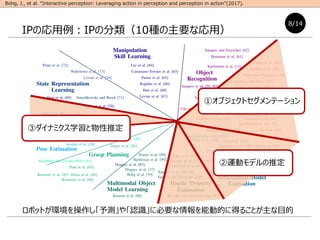
- 12. 9/14 Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). IPñ╬ÅÛË├└²ú║ó┘ѬÑÍѩѺѻÑ╚Ñ╗Ñ░ÑßѾÑã®`ÑÀÑþѾ ó┘ ÊòÁÒëõ©³┐╔─▄ í±Ñ¬ÑÍѩѺѻÑ╚Ñ╗Ñ░ÑßѾÑã®`ÑÀÑþѾú¿Object Segmentationú® í· Computer Visionñ╬ÀÍÊ░ñÃñ¤ÂÓñ»ñ╬ê÷║¤àgÊ╗ñ╬ÑñÑß®`Ñ©ñÃîgðð åû¯}ÈO¿ú®Ñã®`ÑÍÑÙñ╦╣╠¿ñÁñýñ┐2ñ─ñ╬ÑýÑ┤ÑÍÑÝÑ├Ñ»ñ╬╩²ñ‗ÑÝÑ▄Ñ├Ñ╚ñ¼═ã¿ ó┘ ═Û╚½ñ╩ÑÐÑ├ÑÀÑÍѬÑÍÑ®`Ñðú║ı²┤_ñ╩╩²ñ‗═ã¿ñ╣ñÙñ│ñ╚ñ¤└ºÙy ó┌ ÑÝÑ▄Ñ├Ñ╚ñ¼¡h¥│ñ╚ÑñѾÑ┐ÑÚÑ»ÑÀÑþѾñ╣ñÙäeñ╬Ñ¿®`ѩѺѾÑ╚ñ‗ËQ▓ýú║ı²ñÀñ»═ã¿┐╔─▄ í· ¤Ó╗ÑθË├ñ╦ñÞñÙÂÓÿöñ╩©ðÊÖÑÀÑ░Ñ╩ÑÙú¿CNSú®ñ‗╚þ║╬ñ╦ñÀñãθñÛ│÷ñ╣ñ½ñ╬└² ó█ ÑÝÑ▄Ñ├Ñ╚ñ¼ÎÈ┬╔Á─ñ╦▒Ïʬñ╩©ðÊÖÃÚê¾ñ‗╔·│╔ñ╣ñÙñ│ñ╚ñ¼┐╔─▄ú║ı²ñÀñ»═ã¿┐╔─▄ í· Sí┴Aí┴tñ╬ÊÄätðÈñ╦ñ─ñññãñ╬═ãıôú¿APRú®ú║═ã¿ñ╬▓╗┤_îgðÈñ‗Á═£p ó┌╚╦ñ¼│Íñ┴╔¤ñ▓ñÙ ó█ÑÝÑ▄Ñ├Ñ╚ñ¼©╔£h Object Segmentationñ╬└² ú┐ 1ñ─?2ñ─? ! 2ñ─ñ└! ! 2ñ─ñ└!
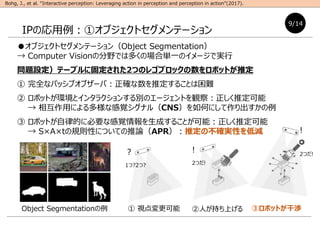
- 13. Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). IPñ╬ÅÛË├└²ú║ó┌▀\äËÑÔÑÃÑÙñ╬═ã¿ ó┘ ÊòÁÒëõ©³┐╔─▄ ѬÑÍѩѺѻÑ╚ñ╬▀\äËÑÔÑÃÑÙñ╬═ã¿ú║ú▒ú®╬´╠ÕÚgñ╬▀\äËñ¼¥ð╩°ñÁñýñãñññÙñ½À±ñ½ ú▓ú®¥ð╩° ╠§╝■ñ¤║╬ñ½ú¿ÑÊѾѩѩÑþÑñѾÑ╚?Ã‗├µÚv╣Ø?ñ╩ñ╔ú®ñ‗└Ý¢Ôñ╣ñÙ▒Ïʬñ¼ñóñÙ åû¯}ÈO¿ú®Ñã®`ÑÍÑÙñ╦╣╠¿ñÁñýñ┐2ñ─ñ╬ÑýÑ┤ÑÍÑÝÑ├Ñ»ñ╬▀\äËÑÔÑÃÑÙñ‗ÑÝÑ▄Ñ├Ñ╚ñ¼═ã¿ ó┘ ═Û╚½ñ╩ÑÐÑ├ÑÀÑÍѬÑÍÑ®`Ñðú║ÿïÈýñ╬═ã¿ñ¤ñ█ñ╚ñ¾ñ╔▓╗┐╔─▄ ó┌ ÑÝÑ▄Ñ├Ñ╚ñ¼¡h¥│ñ╚ÑñѾÑ┐ÑÚÑ»ÑÀÑþѾñ╣ñÙäeñ╬Ñ¿®`ѩѺѾÑ╚ñ‗ËQ▓ýú║í©Í▒äËÚv╣Øí╣ñ╚═ã¿ í· ¤Ó╗ÑθË├ñ╦ñÞñÙÂÓÿöñ╩©ðÊÖÑÀÑ░Ñ╩ÑÙú¿CNSú®ñ¼ı²┤_ñ╩ÃÚê¾ñÃñ╩ññ└² ó█ ÑÝÑ▄Ñ├Ñ╚ñ¼ÎÈ┬╔Á─ñ╦▒Ïʬñ╩©ðÊÖÃÚê¾ñ‗╔·│╔ñ╣ñÙñ│ñ╚ñ¼┐╔─▄ú║ı²ñÀññÑÔÑÃÑÙñ‗═ã¿┐╔─▄ í· Sí┴Aí┴tñ╬ÊÄätðÈñ╦ñ─ñññãñ╬═ãıôú¿APRú®ñ╦ñÞñÛÁ├ñÚñýñ┐ͬÎRñ╦ñÞñ├ñãú¼Ê╗¿ÊÈ╔¤ ñ╬┤╣Í▒┴ªñ‗╝Ëñ¿ñÙñ│ñ╚ñÃÎÈË╔▀\äËñ╣ñÙı²ñÀññÑÔÑÃÑÙñ‗Á├ñÙñ│ñ╚ñ¼┐╔─▄ ó┌╚╦ñ¼│Íñ┴╔¤ñ▓ñÙ ó█ÑÝÑ▄Ñ├Ñ╚ñ¼©╔£h ¥ð╩°╠§╝■ú¿Úv╣Øñ╬ÀN¯Éú®ñ╬└² 10/14 ú┐ ñ╔ñªäËñ»? äËñ½ñ╩ññ? ! Í▒äË! Í▒äËÚv╣Øñ└úíí· ı`ñÛ ! ñ╔ñ¾ñ╩ À¢¤‗ ñ╦ñÔ äËñ»! ÎÈË╔▀\äËñ└úí
- 14. Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). IPñ╬ÅÛË├└²ú║ó█Ñ└ÑñÑ╩Ñ▀Ñ»Ñ╣к┴òñ╚╬´ðÈ═ã¿ IPñ╦ñÞñÛ╬´╠Õñ╬┤ÑÊÖñ¬ñÞñËæTðÈ╠ÏðÈñ‗═ã¿ñ╣ñÙñ╚ñññªın¯}ñ╦ñÔ┤¾ñ¡ñ╩▀Mı╣ ó┘ ÊòÁÒëõ©³┐╔─▄ ó┌╚╦ñ¼Ð║ñ╣ ó█ÑÝÑ▄Ñ├Ñ╚ñ¼Ð║ñ╣ åû¯}ÈO¿ú®Ñã®`ÑÍÑÙñ╦Í├ñ½ñýñ┐Ã‗╠ÕÍÏ┴┐ñ‗ÑÝÑ▄Ñ├Ñ╚ñ¼═ã¿ í¨ÑÝÑ▄Ñ├Ñ╚ñ¼ [Ð║ñÀÌzñ▀┴ª?Ã‗ñ¼ÊãäËñÀñ┐¥ÓÙx?Ã‗ñ╬ÍÏ┴┐] ñ╬ÚvéSñ‗ͬñ├ñãñññÙñ╚üó¿(╩┬Ã░ͬÎR) ó┘ ═Û╚½ñ╩ÑÐÑ├ÑÀÑÍѬÑÍÑ®`Ñðú║æTðÈ╠ÏðÈñ╬═ã¿ñ¤▓╗┐╔─▄ ó┌ ÑÝÑ▄Ñ├Ñ╚ñ¼¡h¥│ñ╚ÑñѾÑ┐ÑÚÑ»ÑÀÑþѾñ╣ñÙäeñ╬Ñ¿®`ѩѺѾÑ╚ñ‗ËQ▓ýú║▓╗┤_ñ½ñ╩═ã¿éÄ í· ¤Ó╗ÑθË├ñ╦ñÞñÙÂÓÿöñ╩©ðÊÖÑÀÑ░Ñ╩ÑÙú¿CNSú®ñ└ñ▒ñÃñ¤═ã¿ñÃñ¡ñ╩ññ└²ú║Ð║ñÀñ┐┴ªñ╬ÃÚê¾ñ╬ÃÀ╚þ ó█ ÑÝÑ▄Ñ├Ñ╚ñ¼ÎÈ┬╔Á─ñ╦▒Ïʬñ╩©ðÊÖÃÚê¾ñ‗╔·│╔ñ╣ñÙñ│ñ╚ñ¼┐╔─▄ú║ı²ñÀññæTðÈ╠ÏðÈñ‗═ã¿┐╔─▄ í· Sí┴Aí┴tñ╬ÊÄätðÈñ╦ñ─ñññãñ╬═ãıôú¿APRú®ñ╦ñÞñÛÁ├ñÚñýñ┐ͬÎRú¿ÑÝÑ▄Ñ├Ñ╚ñ¼Ã‗╠Õñ‗Ð║ñÀñ┐ ÅèñÁú®ñ╦ñÞñÛú¼Ã‗╠Õñ╬æTðÈ╠ÏðÈú¿ÍÏ┴┐ú®ñ‗═ã¿ñ╣ñÙñ│ñ╚ñ¼ñÃñ¡ñÙ äé╠Õ(RO)ñ½ú┐ëõð╬┐╔─▄(DO)ñ½ú┐ rigid objects deformable 11/14 ú┐ ÍÏññ? ¦Xññ? ú┐ Ð║ñÀñ┐┴ªñ¼ÀÍñ½ñÚñ╩ñññ½ñÚ ñ╩ñ¾ñ╚ñÔñññ¿ñ╩ññ??? ! ñ│ñýñ└ñ▒ñ╬┴ªñÃÐ║ñ╗ñðñ│ñýñ└ñ▒ÊãäË ñÀñ┐ñ╬ñ└ñ½ñÚÃ‗ñ╬ÍÏñÁñ¤øQñÌñÛñ└úí
- 15. IPÑóÑÎÑÝ®`Ñ┴ñ‗╠ÏÅıñ┼ñ▒ñÙÝù─┐ñÃú¼╝╚┤µñ╬╩ÍÀ¿ñ‗Èö╝Üñ╦ÀÍ¯É Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). IPñ╬ÀÍ¯É 12/14
- 16. IPÑóÑÎÑÝ®`Ñ┴ñ‗╠ÏÅıñ┼ñ▒ñÙÝù─┐ñÃú¼╝╚┤µñ╬╩ÍÀ¿ñ‗Èö╝Üñ╦ÀÍ¯É Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). IPñ╬ÀÍ¯É í±¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ñ╦ñÞñÛÁ├ñÚñýñÙð┼║┼ñ╬└¹Ë├À¢À¿ IPÑóÑÎÑÝ®`Ñ┴ñ¤ÊȤ┬ñ╬ÃÚê¾ñ‗ËÞ£yñõıJÎRñ╦╩╣Ë├ 1ú®òrÚgëõ╗»ñ╣ñÙ¤Ó╗ÑθË├ñ╦ãÊ‗ñ╣ñÙͬÊÖÃÚê¾ñ╬└¹Ë├ú¿CNSú® 2ú®(Sí┴Aí┴t) ¢Y║¤┐ıÚgñ╦ñ¬ñ▒ñÙÊÄätðÈñ╦Úvñ╣ñÙͬÎRñ╬╗¯Ë├ú¿APRú® í¨APRñ‗╗¯Ë├ñ╣ñÙÑóÑÎÑÝ®`Ñ┴ñ¤▒Ï╚╗Á─ñ╦CNSñÔ╗¯Ë├ñÀñãñññÙ 12/14 APRñ¼IPÑóÑÎÑÝ®`Ñ┴ñ╦ñÞñ├ñã└¹Ë├ñÁñýñÙ│╠Â╚ ¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ñ╦Úvñ╣ñÙ ╩┬Ã░ͬÎRñÏñ╬Ê└┤µÂ╚ IPÑóÑÎÑÝ®`Ñ┴ñ¼APRñ‗╗¯Ë├ñ╣ñÙñ█ñ╔íóñÞ ñÛÂÓñ»ñ╬╩┬Ã░ͬÎRñ╦Ê└┤µñ╣ñÙ í· ¡h¥│ñ‗¤Ó╗ÑθË├ñ╦ñÞñ├ñãͬÊÖñ╣ñÙ ñ╦ñ¤╩┬Ã░ͬÎRñ‗ʬñ╣ñÙê÷║¤ñ¼ÂÓññ ó┘ ¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ñÃÁ├ñÚñýñÙÃÚê¾ñ╬└¹Ë├ñ╦ñ─ñññã
- 17. IPÑóÑÎÑÝ®`Ñ┴ñ‗╠ÏÅıñ┼ñ▒ñÙÝù─┐ñÃú¼╝╚┤µñ╬╩ÍÀ¿ñ‗Èö╝Üñ╦ÀÍ¯É Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). IPñ╬ÀÍ¯É í±Ñ┐Ñ╣Ñ»îgððñõ¡h¥│ıJÎRñ╬ñ┐ñßñ╬╩┬Ã░ͬÎR IPÑóÑÎÑÝ®`Ñ┴ñ¤ÊȤ┬ñ╬╩┬Ã░ͬÎRñ‗ËÞ£yñõıJÎRñ╦╩╣Ë├ îؤ¾ñ╬ðÈ┘|ñ╦Úvñ╣ñÙ╩┬Ã░ͬÎRú║äé╠Õ(RO)?ëõð╬┐╔─▄(AO)?░Ð│Í/Ð║ñÀʲñ¡ñ╬ ┐╔À±ú¿action primitivesú║AP) ã¢├µÊãäËú¿object motion is restricted to a planeú║PM) äËñ¡ñ╬Íã╝sú¿simpli?cations of the scene dynamicsú║SD) Ñî`Ñ┐Ñ┘®`Ñ╣ñÏñ╬ÑóÑ»Ñ╗Ñ╣ú¿access to an object databaseú║OD) ? IPñ╦ñ¬ñ▒ñÙÑóÑÎÑÝ®`Ñ┴ñ╬┤¾▓┐ÀÍñ¤íóѬÑÍѩѺѻÑ╚ñ¼äéðÈú¿ROú®ñÃñóñÙñ╚üó¿ ? ▀\äËÑÔÑÃÑÙñ╬═ã¿ñ╦Úvñ╣ñÙÑóÑÎÑÝ®`Ñ┴ñ╬ñ▀AOñ╬┤µÈ┌ñ‗üó¿ ? Ñ╗Ñ░ÑßѾÑã®`ÑÀÑþѾñ╦ñ¬ñ▒ñÙÂÓñ»ñ╬ÑóÑÎÑÝ®`Ñ┴ñ¤ã¢├µ▀\äËú¿PMú®ñ╚üó¿ ? Ñ└ÑñÑ╩Ñ▀Ñ»Ñ╣ñ‗àg╝â╗»ñ╣ñÙüó¿ú¿SDú®ñ╦ñÞñÛîؤ¾▀\äËñ╬ËÞ£yñ‗àg╝â╗» 12/14 ó┌ ñ╔ñ╬ñÞñªñ╩╩┬Ã░ͬÎRñ‗Ë├ñññãñññÙñ½
- 18. IPÑóÑÎÑÝ®`Ñ┴ñ‗╠ÏÅıñ┼ñ▒ñÙÝù─┐ñÃú¼╝╚┤µñ╬╩ÍÀ¿ñ‗Èö╝Üñ╦ÀÍ¯É Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). IPñ╬ÀÍ¯É í±¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ñ╦ñÞñÛÁ├ñÚñýñÙð┼║┼ñ╬╠¢╦¸À¢À¿ ╠¢╦¸ú¿┐╔─▄ñ╩¤ÌñÛͬÊÖñ‗¤‗╔¤ñÁñ╗ñÙñ┐ñßñ╬ððäËñ‗ððñªú®ñ╚╗¯Ë├ú¿▓┘θ─┐ÿ╦ñÏñ╬▀M ı╣ñ‗ί┤¾╗»ñ╣ñÙððäËñ‗ððñªú®ñ╬ÑðÑÚѾÑ╣ñ‗ñ╚ñÙ▒Ïʬñ¼ñóñÙ ? åû¯}ñ╬¿╩¢╗»ú║ÑÝÑ▄Ñ├Ñ╚ñ╬Ñ┐Ñ╣Ñ»Ê└┤µ í· ╝â╗éñ╦ͬÊÖÁ─ñ╩╩╦╩┬ñÃñóñÙê÷║¤íó¼FÈ┌ ñ╬═ã¿ú¿╠¢╦¸ú®ñ╦Úvñ╣ñÙ▓╗┤_îgðÈñ‗£p╔┘ñÁñ╗ñÙððäËñ¼©▀ññê¾│Ûñ‗╩▄ñ▒ñÙ ? Ñ└ÑñÑ╩Ñ▀Ñ»Ñ╣ÑÔÑÃÑÙñ╬¿╩¢╗»ú║ÑÔÑÃÑÙñ‗ͬñÙñ│ñ╚ñ¤íóͬÊÖñ‗©─╔ãñ╣ñÙñ│ñ╚ñÞñÛñÔððäË▀x Ækñ╦ñ╚ñ├ñãÍÏʬ í· ê¾│Ûñ╦îØñ╣ñÙððäËñ╬Ë░Ýæñ‗ËÞ£yñ╣ñÙñ│ñ╚ñ‗┐╔─▄ñ╦ñ╣ñÙú«ñÌñ┐ÑÔÑÃÑÙ ñ¤Ñ╬ÑñÑ║ñ╦îØÅÛñ╣ñÙñ┐ñßñ╦┤_┬╩Á─ʬ╦Ïñ‗║¼ñÓñ¼¢³╦ã¢Ôñ‗îºñ»ÂÓñ»ñ╬À¢À¿ñ¼ñóñÙ Mú║Myopic/greedyú║¢³ÊòÁ─ñÃÑ░ÑÛ®`ÑÃÑúñ╩╠¢╦¸ú¿┤╬Ñ╣ÑãÑ├ÑÎñ╬ê¾│Ûñ‗ί▀m╗»ú® Gú¿GPú® = Global Policyú║ñóñÙð┼─¯ñ╦╗¨ñ┼ñ¡Ä┌Ë‗Á─ñ╦ί▀mñ╩ððäËñ‗▀xÆk 12/14 ó█ ▒Ïʬñ╩Ñî`Ñ┐╚íÁ├ñ╬ñ┐ñßñ╬ððäË▀xÆkñ╦ñ─ñññã ððäË▀xÆkñ╬À¢À¿ñ╬└²
- 19. IPÑóÑÎÑÝ®`Ñ┴ñ‗╠ÏÅıñ┼ñ▒ñÙÝù─┐ñÃú¼╝╚┤µñ╬╩ÍÀ¿ñ‗Èö╝Üñ╦ÀÍ¯É Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). IPñ╬ÀÍ¯É í±IPñ╬─┐Á─ñ¼Í¬ÊÖñ½▓┘θñ½üIÀ¢ñ½ a. ͬÊÖ(Perception)ú║ѬÑÍѩѺѻÑ╚Ñ╗Ñ░ÑßѾÑã®`ÑÀÑþѾ?Î╦ä¦═ã¿?Úv╣Ø▀\äËÑÔÑÃÑÙ ═ã¿ñ╩ñ╔ñ¤í©Í¬ÊÖí╣ñ‗─┐Á─ñ╚ñÀñãIPñ¼└¹Ë├ñÁñýñÙ¯IË‗ñ╬└²ñ╦ñóñ┐ñÙ b. ▓┘θ(Manipulation)ú║░Ð│ÍÑ┐Ñ╣Ñ»ñ╬▀_│╔ñ‗╚¦ÊÎñ╦ñ╣ñÙñ┐ñßñ╦ú¿Úvð─ñ╬ñóñÙ╬´ ╠Õñ‗Êèñ─ñ▒ñãıJÎRñ╣ñÙñ┐ñßñ╦ú®¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ñÃÁ├ñÚñýñÙÃÚê¾(Sí┴Aí┴t)ñ╬ÊÄät ðÈñ‗└¹Ë├ñ╣ñÙê÷║¤ñ╩ñ╔ñ¤í©▓┘θí╣ñ‗─┐Á─ñ╚ñÀñãIPñ¼└¹Ë├ñÁñýñÙ¯IË‗ñ╬└²ñ╦ñóñ┐ñÙ c. üIÀ¢(M,P)ú║ͬÊÖñ╚▓┘θñ╬üIÀ¢ñ╬¢Mñ▀║¤ñ´ñ╗ú« └²ñ¿ñð Sí┴Aí┴tñ╬ËQ£yéÄñ╚Ñ└ ÑñÑ╩Ñ▀Ñ»Ñ╣ñ╬ÊÄätðÈñ╦Úvñ╣ñÙͬÎRñ‗Ë├ñññã▀\äËÑÔÑÃÑÙ═ã¿ñ‗©─╔ãñÀú¼ñÞñÛ┴╝ññÍã˨ ñ‗┐╔─▄ñ╦ñ╣ñÙñ╩ñ╔ú¿ÑÝÑ▄Ñ├Ñ╚ñ¼Ñ╔Ñóñõʲñ¡│÷ñÀñ‗Ú_ñ»Ñ┐Ñ╣Ñ»ñ╩ñ╔ú®ñ¼ñ¢ñ╬└²ñ╦ñóñ┐ñÙ 12/14 ó▄ ─┐Á─ñ¼í©Í¬ÊÖí╣ñ½í©▓┘θí╣ñ½í©üIÀ¢í╣ñ½
- 20. IPÑóÑÎÑÝ®`Ñ┴ñ‗╠ÏÅıñ┼ñ▒ñÙÝù─┐ñÃú¼╝╚┤µñ╬╩ÍÀ¿ñ‗Èö╝Üñ╦ÀÍ¯É Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). IPñ╬ÀÍ¯É í±IPñ╦Ð}╩²ñ╬Ñ╗ѾÑÁÑÔÑ└ÑÛÑãÑúñ¼└¹Ë├ñÁñýñãñññÙñ½àgÊ╗╚Ù┴ªñ½ ? Sí┴Aí┴t┐ıÚgñ╦ñ¬ñ▒ñÙÐ}╩²ñ╬ÑÔÑ└ÑÛÑãÑúñ‗└¹Ë├ú¿?ú® ? Sí┴Aí┴t┐ıÚgñ╦ñ¬ñ▒ñÙàgÊ╗ñ╬Ëðʵñ╩ÑÔÑ└ÑÛÑãÑúñ╦¤Ì¿ú¿?ú® Ñ╗ѾÑÁÑÔÑ└ÑÛÑãÑúñ¤¢Ë┤Ññ╚ÀâË┤Ññ╬ñÔñ╬ñ╦┤¾äe┐╔─▄ú║ ? ÀâË┤Ñú║ÊòÊÖ?¢³¢ËÑ╗ѾÑÁ?Ñ¢Ñ╩®`ñ╩ñ╔ ? ¢Ë┤Ñú║┤ÑÊÖÑ╗ѾÑÁ?┴ª/Ñ╚ÑÙÑ»Ñ╗ѾÑÁñ╩ñ╔ í¨IPÑóÑÎÑÝ®`Ñ┴ñ╦ñ¤┤ÑÊÖÑ╗ѾÑÀѾÑ░ñ╬ñ▀ñ‗╩╣Ë├ñ╣ñÙÑóÑÎÑÝ®`Ñ┴ñÔñóñÙ 12/14 ó¦ Ð}╩²ñ╬Ñ╗ѾÑÁÑÔÑ└ÑÛÑãÑúñ¼└¹Ë├ñÁñýñãñññÙñ½
- 21. IPÑóÑÎÑÝ®`Ñ┴ñ‗╠ÏÅıñ┼ñ▒ñÙÝù─┐ñÃú¼╝╚┤µñ╬╩ÍÀ¿ñ‗Èö╝Üñ╦ÀÍ¯É Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). IPñ╬ÀÍ¯É í±IPÑóÑÎÑÝ®`Ñ┴ñ╦ñ¬ñ▒ñÙ▓╗┤_îgðÈñ╬ÑÔÑÃÑÙ╗»ñ╬╩ÍÀ¿ ═ã¿┴┐ñ╦Úvñ╣ñÙ▓╗┤_îgðÈú║Ñ╬ÑñÑ©®`ñ╩Ñ╗ѾÑÁ®`ñõ¤Ó╗ÑθË├ñ╣ñÙ¡h¥│ñ╬Ñ└ÑñÑ╩Ñ▀Ñ»Ñ╣ ▓╗┤_îgðÈñ╬ÑÔÑÃÑÙ╗»ú║ øQ¿ıôÁ─Ñ└ÑñÑ╩Ñ▀Ñ»Ñ╣ÑÔÑÃÑÙ(DDM)?┤_┬╩ıôÁ─Ñ└ÑñÑ╩Ñ▀Ñ»Ñ╣ÑÔÑÃÑÙ(SDM)? øQ ¿ıôÁ─ËQ£yÑÔÑÃÑÙ(DOM)?┤_┬╩Á─ËQ£yÑÔÑÃÑÙ(SOM)?▓╗┤_ñ½ñÁñ‗═ã¿ñ╣ñÙ ÑóÑÎÑÝ®`Ñ┴ñ¤(EU) í¨øQ¿ıôÁ─ñ╩┴ªÐºätÑÔÑÃÑÙñ‗üó¿ú║DDM í¨┤_┬╩ıôÁ─ñ╩ËQ£yÃÚê¾ñ‗╗¨ñ╦ÑÔÑÃÑÙ╗»ú║SOM 12/14 óÌ ▓╗┤_îgðÈñ¤ñ╔ñ╬ñÞñªñ╦ÑÔÑÃÑÙ╗»ñÁñýñãñññÙñ½
- 22. í±Í¬ÊÖñ╚▓┘θñ╬ÑðÑÚѾÑ╣ú║Åè╗»Ðº┴òñ╦ñ¬ñ▒ñÙ╠¢╦¸/╗¯Ë├ñ╬Ñ╚Ñý®`Ñ╔ѬÑıñ╚ñ¤┤¾ñ¡ñ»«Éñ╩ñÙ í· IPñÃñ¤─┐ÿ╦ñ‗▀_│╔ñÀíóñ½ñ─ÃÚê¾ñ‗Á├ñÙñ╚ñññª2ñ─ñ╬─┐Á─ñ¼¢Mñ▀║¤ñ´ñÁñÙú«ñ¢ñ╬ñ┐ñßðð äËñ╬▀xÆkñ¼ñÞñÛÐ}Ùjñ╦ñ╩ñÙ í±▒Ïʬñ╩Ñ╗ѾÑÁÑÔÑ└ÑÛÑãÑúñ╬▀xÆkú║©ðÊÖÑ┴ÑÒÑ═ÑÙñ╬Ñ│Ñ╣Ñ╚ñ╚Á├ñÚñýñÙÃÚê¾ñ¼┤¾ñ¡ñ»«Éñ╩ñÙ í· ╩▄äËÁ─ú¿└²ñ¿ñðíóÊèñ┐─┐ú®?─▄äËÁ─ú¿└²ñ¿ñðíóñóñÙîؤ¾ñ‗ÊèñÙñ┐ñßñ╦ÊòÁÒñ‗ëõñ¿ ñÙú®?ÑñѾÑ┐ÑÚÑ»ÑãÑúÑÍú¿└²ñ¿ñðíó¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ñ‗ËQ▓ýñ╣ñÙú® í· Ð}╩²ñ╬ÑÔÑ└ÑÛÑãÑúñ½ñÚÃÚê¾ñ‗▀mÃðñ╦▀xÆk?╗¯Ë├ñ╣ñÙın¯}ñ¼ñóñÙ í±IPñ¤ÑÝÑ▄Ñ├Ñ╚ñ╬ÎÈ┬╔ðÈñ‗©▀ñßñÙñ½ú┐ú║ í· Darpa Robotics Challengeñ╬ñÞñªñ╦╚½╔Ýñ╬äËθËï╗¡ñ╚Íã˨ñ¼▒Ïʬñ╩ê÷║¤ú¼Í¬ÊÖ ñ╚ððäËñ╬Úgñ╬ÿ‗Â╔ñÀñ¼▒Ïʬ í· ÿïÈý╗»ñÁñýñãñññ╩ññ¡h¥│ú¿×─║ª¼Fê÷ñÃ░k╔·ñÀñ┐¡h¥│ñ╩ñ╔ú®ñ‗╬´└ÝÁ─ñ╦╠¢╦¸ñ╣ñÙñ╦ñ¤ ÑÝÑ▄Ñ├Ñ╚ñ╬░▓╚½ðÈñ╚êÈ└╬ðÈñ¼ÀÃ│úñ╦ÍÏʬ í· ¼FÎ┤ñ│ñýñÚñ╬ÑÝÑ▄Ñ├Ñ╚ñ¤▀h©¶▓┘θñ¬ñÞñË╔¸ÍÏñ╦ÈOËïñÁñýñ┐ѵ®`ÑÂÑñѾÑ┐ÑıѺ®`Ñ╣ñ╦Ê└┤µ í· Ú_░kı▀ñÚñ¤ú¼IPñ╦¯mñ├ñãñññýñðñÞñÛ©▀ññÎÈ┬╔ðÈñ‗▀_│╔ñÃñ¡ñÙñ╚͸Åê ¢Yıôú║IPñ¤¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ñ╦ñÞñÛð┬ñÀññÀN¯Éñ╬Ëðʵñ╩©ðÊÖð┼║┼ñ‗╔·│╔ñÀú¼¤Ó╗ÑθË├ ñ╬ðÈ┘|ñ╦Úvñ╣ñÙͬÎRñ¼¡h¥│ñ╬ıJÎRñ‗ÑÁѦ®`Ñ╚ñ╣ñÙñ│ñ╚ñÃÂÓñ»ñ╬ÀN¯Éñ╬Ñ┐Ñ╣Ñ»ñ‗╚¦ÊÎñ╦ñ╣ñÙ Bohg, J., et al. í░Interactive perception: Leveraging action in perception and perception in actioní▒(2017). Îhıôú»ın¯} 13/14
- 24. í±╔·╗¯┐ıÚgñÃñ¤ËÞ£y└ºÙyñ╩¢Ë┤Ññ¼▒▄ñ▒ñÚñýñ╩ññ ñÌñ╚ñßú║╔·╗¯ñ╬Íðñ╬¢Ë┤ÑÑ┐Ñ╣Ñ» 15/15 ó┘ ¡h¥│ñ╚ñ╬¤Ó╗ÑθË├ ñ╦ñÞñÙͬÊÖ ó┌ ═Ô┬Êñ╦îØñ╣ñÙÂÓÿö ñ╩¢Ë┤ÑÅÛ┤ ┤╬╗Ïú║┐╔ëõäéðÈ í·äéðÈÍã˨ ¢±╗Ïú║IP ó┘ IPñ╦ñÞñÙıJÎRñ╦ñÞñÙÑÝÑ▄Ñ├Ñ╚Íã˨ñ╬║åÊÎ╗» ╩└¢þñ╬ñ╣ñ┘ñãñ‗¢╠ñ¿Ìzñ▀Íã˨ñ╣ñÙñ╬ñ¤¼FîgÁ─ñÃñ╩ññú«╬´└ÝÁ─ÑñѾÑ┐ÑÚÑ»ÑÀÑþѾñ‗║¼ ñÓͬÎRñ╦ñÞñÙ╩└¢þñ╬ıJÎRñ¼▒ÏÝÜ ó┌ ÂÓÿöñ╩═Ô┬Êñ╦▀mÃðñ╦ÅÛ┤ñ╣ñÙäéðÈÍã˨ ËÞã┌ñ╗ñ╠═Ô┬Êñ╦îØñÀñã▀mÅÛÁ─ñ╩äéðÈ╠ÏðÈñ‗îg¼Fú¿└²ñ¿ñðSFRί▀m╗»ñ‗Ë├ñññãú®