Introduction-to-Robotics-PowerPoint-Presentation-on-Robotics.ppt
Download as PPT, PDF0 likes103 views
fty
1 of 19
Download to read offline












Recommended
Introduction-to-Robotics-PowerPoint-Presentation-on-Robotics.ppt
Introduction-to-Robotics-PowerPoint-Presentation-on-Robotics.pptdevil00321a
╠²
This document provides an introduction to robotics, defining robots as programmable mechanical or virtual agents that can perform a variety of tasks. The key components of robots are sensors that provide information, a controller (often a microcontroller like Arduino) that receives sensor signals and drives actuators, and actuators (typically motors) that enable movement. Robots are widely used in industrial applications for tasks like welding and assembly. They are also used where human safety is a risk, such as by the military or for space exploration. The goal of robotics is to develop flexible, human-like robots that can perform most human tasks.Introduction-to-Robotics-PowerPoint-Presentation-on-Robotics.ppt
Introduction-to-Robotics-PowerPoint-Presentation-on-Robotics.pptJhaneGonzales1
╠²
This document provides an introduction to robotics, defining robots as programmable mechanical or virtual agents that can perform a variety of tasks. The key components of robots are sensors that provide information, a controller (often a microcontroller like Arduino) that receives sensor signals and drives actuators, and actuators (typically motors) that enable movement. Robots are widely used in industrial applications for tasks like welding and assembly. They are also used where human safety is a risk, such as by the military or for space exploration. The goal of robotics is to develop flexible, human-like robots that can perform most human tasks.ROBOTICS
ROBOTICSKumar Nishant Ranjan Sinha
╠²
about robotics with some introductory level information. This presentation can be used to address a group of people to evoke their interests in robotics.robotics.pptx
robotics.pptxnireekshan1
╠²
The document provides an overview of robotics, including the key topics of: building blocks of robots such as actuators, sensors, processors and controllers; classifications of robots into manipulators, mobile robots, and humanoids; functions involved in robotic movement; software architectures; applications of AI in robotics; application domains; and pros and cons of robots. It introduces robotics and defines a robot, then discusses each topic in 1-2 paragraphs with examples.Introduction to Robotics 
Introduction to Robotics Sanjheev R
╠²
Robotics is an interdisciplinary field that involves engineering and science principles to design, build, and program robotic systems. The document discusses key aspects of robotics including artificial intelligence, components like power sources and sensors, locomotion, manipulation, and applications. Robotics technology has the potential to change the world for the better through applications like automated assembly and welding. Education and training in robotics engineering is needed to further advance the capabilities of robots.569637 634222725772371250
569637 634222725772371250Abhishek Raj
╠²
This document provides an overview of robotics and artificial intelligence. It defines robotics as the science and technology of robots, their design, manufacture, and application. It discusses the history and development of robots from early designs by Leonardo da Vinci to modern industrial robots. The document also describes different types of robots including pick and place robots, continuous path control robots, and sensory robots. It outlines applications of robots in areas like manufacturing, space exploration, agriculture, and more. Finally, it introduces artificial intelligence concepts like autonomous agents and behavior engineering and provides examples of AI robots like SPOT, Fresh Kitty, and the humanoid robot COG.Robotics classes in mumbai
Robotics classes in mumbaiVibrant Technologies & Computers
╠²
Robotics classes in mumbai
best Robotics classes in mumbai with job assistance.
our features are:
expert guidance by it industry professionals
lowest fees of 5000
practical exposure to handle projects
well equiped lab
after course resume writing guidance
Robotics and technologies 2020
Robotics and technologies 2020hulas raj tonday
╠²
This presentation provides a brief study and fundamental awareness of robotics till year 2020. It also includes a brief history and evolutions of robots. it also includes robotics research institutes in India which deal with innovations and developments. INTRODUCTION TO ROBOTICS12345678 (1).pdf
INTRODUCTION TO ROBOTICS12345678 (1).pdfJacelJaneOchavillo
╠²
Robotics is a field of engineering and science that involves the design, construction, operation, and use of robots. It integrates various disciplines such as mechanical engineering, electrical engineering, computer science, and artificial intelligence. Robots are machines designed to perform tasks that are either too dangerous, repetitive, or complex for humans to do easily.
Key Areas of Robotics:
Mechanical Systems: The physical components of the robot, such as gears, wheels, arms, and sensors, that allow it to move and interact with its environment.
Electrical Systems: The robot's electrical components, including power supplies (like batteries), circuits, and motors, that drive the robot's movement and control its functions.
Computer Systems: The programming or artificial intelligence that controls the robot, allowing it to follow instructions or perform tasks autonomously or semi-autonomously.
Sensors and Actuators: Sensors gather information from the environment (e.g., light, temperature, proximity), and actuators carry out movements or other functions based on that data.
Artificial Intelligence (AI): In advanced robotics, AI allows robots to make decisions, learn from experiences, and adapt to new situations.
Applications of Robotics:
Manufacturing: Industrial robots assemble products, weld parts, or handle hazardous materials.
Healthcare: Robots assist in surgeries, rehabilitation, or provide care to patients.
Exploration: Robots explore environments like outer space, deep oceans, or hazardous sites.
Service Robots: These robots help in everyday tasks like vacuuming, serving food, or assisting elderly people.
Military: Robots are used for reconnaissance, bomb disposal, or surveillance in dangerous environments.
Characteristics of Robots:
Autonomy: The ability to operate without human intervention.
Sensing: The capability to perceive its environment using sensors.
Interaction: The robotŌĆÖs capacity to interact with objects or people in its environment.
Robotics continues to evolve rapidly, pushing the boundaries of what machines can do, from AI-powered automation to assisting humans in everyday tasks.Artificial-Intelligence-High-Technology-PowerPoint-Templates.pptx
Artificial-Intelligence-High-Technology-PowerPoint-Templates.pptxnripendrakumarbedi
╠²
kjeagfugheugfgaehfguiaynfnugaeuifhuAll Terrain Offensive and Defensive Robot
All Terrain Offensive and Defensive Robotijtsrd
╠²
This document describes the development of an all-terrain offensive and defensive robot. The robot uses an Arduino microcontroller, DC motor drivers, a servo motor driver, a laser module, a wireless camera, and a Bluetooth module. It is designed to move in various terrains like forests and hilly areas. The robotic arm can pick up and drop bombs which are monitored by the wireless camera. The whole system is controlled via an Android application using Bluetooth. The robot was successfully implemented and able to move in different directions and use the laser module and robotic arm as intended. It has potential applications in military operations and hazardous environments.Introduction to robotics
Introduction to roboticsNitesh Singh
╠²
Robotics is an interdisciplinary field that applies concepts of engineering and computer science to develop machines that can assist humans. A robot is defined as a programmable machine that can perform physical tasks through movement of parts. Isaac Asimov popularized the three laws of robotics to ensure robots do not harm humans. Current robots are used for industrial manufacturing and hazardous situations. The development of humanoid robots like ASIMO and iCub aim to make robots capable of assisting humans through tasks requiring mobility, dexterity and cognition.Mr302:module 4:mtr,ncerc,JVP
Mr302:module 4:mtr,ncerc,JVPJishnu Jish
╠²
1) The document introduces robotics, defining a robot as a reprogrammable machine designed to perform tasks.
2) It discusses the types, uses, history, key components, and applications of robots. Robots are used for dangerous, repetitive, or menial tasks.
3) The future of robotics involves greater autonomy, with humanoid robots and robot work crews. Applications include agriculture, automotive, military, medical, space, and more.Intro robotics
Intro roboticsrajmohan1976july
╠²
1) The document introduces robotics, defining a robot as a reprogrammable machine designed to perform tasks.
2) It discusses the types, uses, history, key components, and applications of robots. Robots are used for dangerous, repetitive, or menial tasks.
3) The future of robotics involves greater autonomy, with humanoid robots and robot work crews. Applications include agriculture, automotive, military, medical, space, and more.introduction-to-robotics.pdf
introduction-to-robotics.pdfYGBala
╠²
This document provides an introduction to robotics, including:
- Definitions of a robot as machines that can be reprogrammed to perform tasks.
- The main types of robots including manipulators, wheeled, legged, UAVs, and UUVs.
- The key uses of robots in jobs that are dangerous, repetitive, or menial for humans.
- A brief history of robotics from the first industrial robot in 1954 to developments in the 1980s and 2000s.
- The main components of robots including their base, manipulator, controller, sensors, actuators, and power systems.
- Current and future applications of robots in industries like manufacturing, agriculture, healthcare, andMaterial Handling Robot For Smart Manufacturing in Industries
Material Handling Robot For Smart Manufacturing in Industriesdbpublications
╠²
AbstractŌĆöMaterial Handling RoboŌĆÖs are mechanically controlled devices designed to replicate the movement of a human arm. The devices are used for lifting heavy objects and carrying out tasks that require extreme concentration and expert accuracy.In this highly developing society; time and man power are critical constrains for completion of task in large scales. the automation is playing important role to save human efforts in most of the regular and frequently carried works e.g. most of the industrial jobs like welding, painting, assembly, container filling etc. one of the major and most commonly performed work is picking and placing of jobs from source to destination. For this purpose, We intend to design a prototype based robo using pick and place mechanism.Material Selection is done using RFID Technology.The Material Handling Robot is a microcontroller based mechatronic system that detects the object based on the instruction given by the RFID Reader, picks that object automatically from source location and places at desired location.A mechanical gripper is robotic, usually programmable, with similar functions to a human arm.Thus designing a Material Handling Robo most often can be used for industrial and nonindustrial purposes.introduction to Robotics (the role of computer science)
introduction to Robotics (the role of computer science)RajeshSharma1041
╠²
This document provides an introduction to robotics, including definitions of robotics, the history of robots from the first industrial robot installed in 1961 through current generations, and types of robots such as pre-programmed, humanoid, autonomous, teleoperated, and augmenting robots. It also discusses how computer science relates to robots through areas like artificial intelligence and sensor processing, and gives examples of applications of current and future robots in areas like medical care, bomb disposal, transportation, exploration, and more.Introduction to robotics
Introduction to roboticsPushpa Saravanan
╠²
Robotic technology has evolved from early concepts of robots in literature to modern applications. Robots are programmable machines designed to perform tasks automatically. They consist of mechanical parts, sensors to perceive the environment, processors to make decisions, and effectors to manipulate objects. Key events included the coining of the term "robot" in 1920 and "robotics" in the 1940s. Isaac Asimov proposed three laws of robotics to ensure robots do not harm humans. Modern robots are used for industrial manufacturing, medical procedures, space exploration, military applications, and more. They allow tasks to be performed quickly, consistently and in hazardous environments.LectureOne_introduction-to-robotics-DrWasan.ppsx
LectureOne_introduction-to-robotics-DrWasan.ppsxwasaneng
╠²
This document provides an overview of robotics, including:
- A definition of a robot and a brief history tracing the origins of the word back to Karel Capek's 1920 play.
- The basic building blocks of a robot including sensors, effectors, actuators, controllers, and power supply.
- Examples of different types of robots categorized by application, such as mobile, stationary, industrial, educational, and domestic robots.
- Advantages and disadvantages of using robots, such as their ability to perform dangerous or repetitive tasks consistently while also potentially replacing human jobs.Introduction to robotics
Introduction to roboticsBikash Shrestha
╠²
Robotics is the branch of technology that deals with the design, construction, operation, and application of robots. It involves the use of electronics, mechanics, and computer engineering to mimic human actions. Isaac Asimov proposed three laws of robotics to ensure robots do not harm humans. Robots have a variety of uses including industrial applications, hazardous environments, research, military, households, agriculture, healthcare, and more. The key components of robots include a power supply, sensors to collect information, a controller to process sensor inputs and activate effectors, effectors to perform tasks, and actuators like motors and cylinders to power the effectors. Locomotion involves different drive systems like differential, car, and skid steer drives toRobots
Robotsmrscjrobertson
╠²
Robots are machines that can be programmed to perform various tasks. There are two main types: stationary robots fixed in one location like on an assembly line, and mobile robots that can move around like robotic forklifts. Robots generally have an arm, power supply, and controlling computer. The arm has movable joints called degrees of freedom. Mobile robots use wheels or tracks and guidance systems like magnets or light to navigate. Intelligent robots have powerful processors, memory, sensors and can learn from their experiences.Intro to robotics
Intro to roboticsMarc Dy
╠²
This document provides an introduction to robotics, including:
- Defining robots and discussing their history from the 1920s concept to modern industrial uses
- Describing common robot components like manipulators, sensors, actuators, and controllers
- Explaining what tasks robots can perform like dangerous, repetitive, or menial jobs in various industries
- Discussing future directions like artificial intelligence, autonomy, and humanoid robotsRobotics
RoboticsImtiaz Siddique
╠²
Information about robotics, types of robotics, objectives, what is actuators, traditional vs robotics, technologies, interaction, social robots, applications of Robots, Advantages of robotics, disadvantages of robotics, difference between robotic system and other artificial intellegence technologiesrobotics 
robotics samrana gultasab
╠²
This document discusses robots and robotic technology. It provides information on the components of robots including power supply, actuators, sensors, manipulation and locomotion. It also discusses different robotic architectures and compares the HRP-4C humanoid robot to the HRP-4 robot. In conclusion, robots provide advantages for applications in hazardous environments or for tasks requiring speed and accuracy, though they may displace some human jobs.Introduction robotics
Introduction roboticsIjal Mustofa
╠²
This document provides an introduction to robotics, including definitions of robots, a brief history of robot development from the 1920s to present, key components of robots like manipulators, bases, sensors, actuators, and controllers. It discusses current and potential applications of robots in industries like manufacturing, healthcare, space, hazardous environments, homes, and more. The future of robotics with advances in artificial intelligence and humanoids is also outlined. The document concludes by describing some current robotics projects at the Polytechnic University robotics center.Andriod Controlled Pick and Place Arm with Line Follower Automaton
Andriod Controlled Pick and Place Arm with Line Follower Automatonijtsrd
╠²
Manufacturing automaton is widely used in small and medium plants, however, automaton cooperating with other devices is an important aspect for achieving the fully autonomous system. This paper presents the Pick and Place Robot with Line Follower Function for manufacturing application. Model of pick and place robot which will be functioned following a specific line may benefit production to reduce the labor cost or maybe alternatives of the labors. This system has a line follower and pick and place function that is controlled by Andriod with Arduino. Lwin Lwin Htay | Nyan Phyo Aung | Mo Mo Myint Wai "Andriod Controlled Pick and Place Arm with Line Follower Automaton" Published in International Journal of Trend in Scientific Research and Development (ijtsrd), ISSN: 2456-6470, Volume-3 | Issue-5 , August 2019, URL: https://www.ijtsrd.com/papers/ijtsrd26407.pdfPaper URL: https://www.ijtsrd.com/engineering/electronics-and-communication-engineering/26407/andriod-controlled-pick-and-place-arm-with-line-follower-automaton/lwin-lwin-htay
Presentation1.pptx
Presentation1.pptxABDULBASITABDULAZEEZ2
╠²
This document discusses robotics and provides information on various topics related to the field. It begins by defining robotics and robots, and describes how robotics combines multiple engineering disciplines. It then discusses different types of robots and their applications in manufacturing, healthcare, agriculture, logistics, space exploration, defense, education, entertainment, and more. The document outlines key robot components and concludes by discussing both the benefits and challenges of robotics, as well as trends that may shape the future of robotics such as increased use of AI/machine learning, collaborative robots, swarm robotics, and roles in industry automation.NCACSE PPT FINAL.pptx
NCACSE PPT FINAL.pptxKunalPardeshi16
╠²
This document describes a hand gesture controlled robot with obstacle avoidance capabilities built using an Arduino. The robot operates in both manual and autonomous modes, with hand gestures sensed by an Arduino and accelerometer worn by the user to control movement. An ultrasonic sensor allows the robot to change direction automatically if obstacles are detected. The project aims to address minor delays in communication and improve accuracy of the gesture recognition system. Results show that users prioritized precision over speed when controlling the robot. Future applications of this gesture technology include use in industries like automation, medical, and gaming.Ktor - Definizioni di Path, Integrazioni, Plugin e build fino al rilascio
Ktor - Definizioni di Path, Integrazioni, Plugin e build fino al rilascioinfogdgmi
╠²
Tra i vari framework backend basati sulla JVM, uno in particolare, con il passare del tempo, ha saputo ritagliarsi il suo spazio: era Ktor (figlio di Kmer).
In questo talk faremo un tour di Ktor,
dalla sua parte backend: Definizioni di Path, Integrazioni, Plugin e build fino al rilascio (e qualche chicca),
fino alla sua controparte client e qualche sua integrazioneRequirements Engineering for Secure Software
Requirements Engineering for Secure SoftwareDr Sarika Jadhav
╠²
Security requirements are often treated as generic lists of features, neglecting system-specific needs and the attacker's perspective. A systematic approach to security requirements engineering is crucial to avoid this problem.
Requirements engineering defects can cost 10 to 200 times more to correct once the system is operational. Software development takes place in a dynamic environment, causing requirements to constantly change.
More Related Content
Similar to Introduction-to-Robotics-PowerPoint-Presentation-on-Robotics.ppt (20)
INTRODUCTION TO ROBOTICS12345678 (1).pdf
INTRODUCTION TO ROBOTICS12345678 (1).pdfJacelJaneOchavillo
╠²
Robotics is a field of engineering and science that involves the design, construction, operation, and use of robots. It integrates various disciplines such as mechanical engineering, electrical engineering, computer science, and artificial intelligence. Robots are machines designed to perform tasks that are either too dangerous, repetitive, or complex for humans to do easily.
Key Areas of Robotics:
Mechanical Systems: The physical components of the robot, such as gears, wheels, arms, and sensors, that allow it to move and interact with its environment.
Electrical Systems: The robot's electrical components, including power supplies (like batteries), circuits, and motors, that drive the robot's movement and control its functions.
Computer Systems: The programming or artificial intelligence that controls the robot, allowing it to follow instructions or perform tasks autonomously or semi-autonomously.
Sensors and Actuators: Sensors gather information from the environment (e.g., light, temperature, proximity), and actuators carry out movements or other functions based on that data.
Artificial Intelligence (AI): In advanced robotics, AI allows robots to make decisions, learn from experiences, and adapt to new situations.
Applications of Robotics:
Manufacturing: Industrial robots assemble products, weld parts, or handle hazardous materials.
Healthcare: Robots assist in surgeries, rehabilitation, or provide care to patients.
Exploration: Robots explore environments like outer space, deep oceans, or hazardous sites.
Service Robots: These robots help in everyday tasks like vacuuming, serving food, or assisting elderly people.
Military: Robots are used for reconnaissance, bomb disposal, or surveillance in dangerous environments.
Characteristics of Robots:
Autonomy: The ability to operate without human intervention.
Sensing: The capability to perceive its environment using sensors.
Interaction: The robotŌĆÖs capacity to interact with objects or people in its environment.
Robotics continues to evolve rapidly, pushing the boundaries of what machines can do, from AI-powered automation to assisting humans in everyday tasks.Artificial-Intelligence-High-Technology-PowerPoint-Templates.pptx
Artificial-Intelligence-High-Technology-PowerPoint-Templates.pptxnripendrakumarbedi
╠²
kjeagfugheugfgaehfguiaynfnugaeuifhuAll Terrain Offensive and Defensive Robot
All Terrain Offensive and Defensive Robotijtsrd
╠²
This document describes the development of an all-terrain offensive and defensive robot. The robot uses an Arduino microcontroller, DC motor drivers, a servo motor driver, a laser module, a wireless camera, and a Bluetooth module. It is designed to move in various terrains like forests and hilly areas. The robotic arm can pick up and drop bombs which are monitored by the wireless camera. The whole system is controlled via an Android application using Bluetooth. The robot was successfully implemented and able to move in different directions and use the laser module and robotic arm as intended. It has potential applications in military operations and hazardous environments.Introduction to robotics
Introduction to roboticsNitesh Singh
╠²
Robotics is an interdisciplinary field that applies concepts of engineering and computer science to develop machines that can assist humans. A robot is defined as a programmable machine that can perform physical tasks through movement of parts. Isaac Asimov popularized the three laws of robotics to ensure robots do not harm humans. Current robots are used for industrial manufacturing and hazardous situations. The development of humanoid robots like ASIMO and iCub aim to make robots capable of assisting humans through tasks requiring mobility, dexterity and cognition.Mr302:module 4:mtr,ncerc,JVP
Mr302:module 4:mtr,ncerc,JVPJishnu Jish
╠²
1) The document introduces robotics, defining a robot as a reprogrammable machine designed to perform tasks.
2) It discusses the types, uses, history, key components, and applications of robots. Robots are used for dangerous, repetitive, or menial tasks.
3) The future of robotics involves greater autonomy, with humanoid robots and robot work crews. Applications include agriculture, automotive, military, medical, space, and more.Intro robotics
Intro roboticsrajmohan1976july
╠²
1) The document introduces robotics, defining a robot as a reprogrammable machine designed to perform tasks.
2) It discusses the types, uses, history, key components, and applications of robots. Robots are used for dangerous, repetitive, or menial tasks.
3) The future of robotics involves greater autonomy, with humanoid robots and robot work crews. Applications include agriculture, automotive, military, medical, space, and more.introduction-to-robotics.pdf
introduction-to-robotics.pdfYGBala
╠²
This document provides an introduction to robotics, including:
- Definitions of a robot as machines that can be reprogrammed to perform tasks.
- The main types of robots including manipulators, wheeled, legged, UAVs, and UUVs.
- The key uses of robots in jobs that are dangerous, repetitive, or menial for humans.
- A brief history of robotics from the first industrial robot in 1954 to developments in the 1980s and 2000s.
- The main components of robots including their base, manipulator, controller, sensors, actuators, and power systems.
- Current and future applications of robots in industries like manufacturing, agriculture, healthcare, andMaterial Handling Robot For Smart Manufacturing in Industries
Material Handling Robot For Smart Manufacturing in Industriesdbpublications
╠²
AbstractŌĆöMaterial Handling RoboŌĆÖs are mechanically controlled devices designed to replicate the movement of a human arm. The devices are used for lifting heavy objects and carrying out tasks that require extreme concentration and expert accuracy.In this highly developing society; time and man power are critical constrains for completion of task in large scales. the automation is playing important role to save human efforts in most of the regular and frequently carried works e.g. most of the industrial jobs like welding, painting, assembly, container filling etc. one of the major and most commonly performed work is picking and placing of jobs from source to destination. For this purpose, We intend to design a prototype based robo using pick and place mechanism.Material Selection is done using RFID Technology.The Material Handling Robot is a microcontroller based mechatronic system that detects the object based on the instruction given by the RFID Reader, picks that object automatically from source location and places at desired location.A mechanical gripper is robotic, usually programmable, with similar functions to a human arm.Thus designing a Material Handling Robo most often can be used for industrial and nonindustrial purposes.introduction to Robotics (the role of computer science)
introduction to Robotics (the role of computer science)RajeshSharma1041
╠²
This document provides an introduction to robotics, including definitions of robotics, the history of robots from the first industrial robot installed in 1961 through current generations, and types of robots such as pre-programmed, humanoid, autonomous, teleoperated, and augmenting robots. It also discusses how computer science relates to robots through areas like artificial intelligence and sensor processing, and gives examples of applications of current and future robots in areas like medical care, bomb disposal, transportation, exploration, and more.Introduction to robotics
Introduction to roboticsPushpa Saravanan
╠²
Robotic technology has evolved from early concepts of robots in literature to modern applications. Robots are programmable machines designed to perform tasks automatically. They consist of mechanical parts, sensors to perceive the environment, processors to make decisions, and effectors to manipulate objects. Key events included the coining of the term "robot" in 1920 and "robotics" in the 1940s. Isaac Asimov proposed three laws of robotics to ensure robots do not harm humans. Modern robots are used for industrial manufacturing, medical procedures, space exploration, military applications, and more. They allow tasks to be performed quickly, consistently and in hazardous environments.LectureOne_introduction-to-robotics-DrWasan.ppsx
LectureOne_introduction-to-robotics-DrWasan.ppsxwasaneng
╠²
This document provides an overview of robotics, including:
- A definition of a robot and a brief history tracing the origins of the word back to Karel Capek's 1920 play.
- The basic building blocks of a robot including sensors, effectors, actuators, controllers, and power supply.
- Examples of different types of robots categorized by application, such as mobile, stationary, industrial, educational, and domestic robots.
- Advantages and disadvantages of using robots, such as their ability to perform dangerous or repetitive tasks consistently while also potentially replacing human jobs.Introduction to robotics
Introduction to roboticsBikash Shrestha
╠²
Robotics is the branch of technology that deals with the design, construction, operation, and application of robots. It involves the use of electronics, mechanics, and computer engineering to mimic human actions. Isaac Asimov proposed three laws of robotics to ensure robots do not harm humans. Robots have a variety of uses including industrial applications, hazardous environments, research, military, households, agriculture, healthcare, and more. The key components of robots include a power supply, sensors to collect information, a controller to process sensor inputs and activate effectors, effectors to perform tasks, and actuators like motors and cylinders to power the effectors. Locomotion involves different drive systems like differential, car, and skid steer drives toRobots
Robotsmrscjrobertson
╠²
Robots are machines that can be programmed to perform various tasks. There are two main types: stationary robots fixed in one location like on an assembly line, and mobile robots that can move around like robotic forklifts. Robots generally have an arm, power supply, and controlling computer. The arm has movable joints called degrees of freedom. Mobile robots use wheels or tracks and guidance systems like magnets or light to navigate. Intelligent robots have powerful processors, memory, sensors and can learn from their experiences.Intro to robotics
Intro to roboticsMarc Dy
╠²
This document provides an introduction to robotics, including:
- Defining robots and discussing their history from the 1920s concept to modern industrial uses
- Describing common robot components like manipulators, sensors, actuators, and controllers
- Explaining what tasks robots can perform like dangerous, repetitive, or menial jobs in various industries
- Discussing future directions like artificial intelligence, autonomy, and humanoid robotsRobotics
RoboticsImtiaz Siddique
╠²
Information about robotics, types of robotics, objectives, what is actuators, traditional vs robotics, technologies, interaction, social robots, applications of Robots, Advantages of robotics, disadvantages of robotics, difference between robotic system and other artificial intellegence technologiesrobotics
robotics samrana gultasab
╠²
This document discusses robots and robotic technology. It provides information on the components of robots including power supply, actuators, sensors, manipulation and locomotion. It also discusses different robotic architectures and compares the HRP-4C humanoid robot to the HRP-4 robot. In conclusion, robots provide advantages for applications in hazardous environments or for tasks requiring speed and accuracy, though they may displace some human jobs.Introduction robotics
Introduction roboticsIjal Mustofa
╠²
This document provides an introduction to robotics, including definitions of robots, a brief history of robot development from the 1920s to present, key components of robots like manipulators, bases, sensors, actuators, and controllers. It discusses current and potential applications of robots in industries like manufacturing, healthcare, space, hazardous environments, homes, and more. The future of robotics with advances in artificial intelligence and humanoids is also outlined. The document concludes by describing some current robotics projects at the Polytechnic University robotics center.Andriod Controlled Pick and Place Arm with Line Follower Automaton
Andriod Controlled Pick and Place Arm with Line Follower Automatonijtsrd
╠²
Manufacturing automaton is widely used in small and medium plants, however, automaton cooperating with other devices is an important aspect for achieving the fully autonomous system. This paper presents the Pick and Place Robot with Line Follower Function for manufacturing application. Model of pick and place robot which will be functioned following a specific line may benefit production to reduce the labor cost or maybe alternatives of the labors. This system has a line follower and pick and place function that is controlled by Andriod with Arduino. Lwin Lwin Htay | Nyan Phyo Aung | Mo Mo Myint Wai "Andriod Controlled Pick and Place Arm with Line Follower Automaton" Published in International Journal of Trend in Scientific Research and Development (ijtsrd), ISSN: 2456-6470, Volume-3 | Issue-5 , August 2019, URL: https://www.ijtsrd.com/papers/ijtsrd26407.pdfPaper URL: https://www.ijtsrd.com/engineering/electronics-and-communication-engineering/26407/andriod-controlled-pick-and-place-arm-with-line-follower-automaton/lwin-lwin-htay
Presentation1.pptx
Presentation1.pptxABDULBASITABDULAZEEZ2
╠²
This document discusses robotics and provides information on various topics related to the field. It begins by defining robotics and robots, and describes how robotics combines multiple engineering disciplines. It then discusses different types of robots and their applications in manufacturing, healthcare, agriculture, logistics, space exploration, defense, education, entertainment, and more. The document outlines key robot components and concludes by discussing both the benefits and challenges of robotics, as well as trends that may shape the future of robotics such as increased use of AI/machine learning, collaborative robots, swarm robotics, and roles in industry automation.NCACSE PPT FINAL.pptx
NCACSE PPT FINAL.pptxKunalPardeshi16
╠²
This document describes a hand gesture controlled robot with obstacle avoidance capabilities built using an Arduino. The robot operates in both manual and autonomous modes, with hand gestures sensed by an Arduino and accelerometer worn by the user to control movement. An ultrasonic sensor allows the robot to change direction automatically if obstacles are detected. The project aims to address minor delays in communication and improve accuracy of the gesture recognition system. Results show that users prioritized precision over speed when controlling the robot. Future applications of this gesture technology include use in industries like automation, medical, and gaming.Recently uploaded (20)
Ktor - Definizioni di Path, Integrazioni, Plugin e build fino al rilascio
Ktor - Definizioni di Path, Integrazioni, Plugin e build fino al rilascioinfogdgmi
╠²
Tra i vari framework backend basati sulla JVM, uno in particolare, con il passare del tempo, ha saputo ritagliarsi il suo spazio: era Ktor (figlio di Kmer).
In questo talk faremo un tour di Ktor,
dalla sua parte backend: Definizioni di Path, Integrazioni, Plugin e build fino al rilascio (e qualche chicca),
fino alla sua controparte client e qualche sua integrazioneRequirements Engineering for Secure Software
Requirements Engineering for Secure SoftwareDr Sarika Jadhav
╠²
Security requirements are often treated as generic lists of features, neglecting system-specific needs and the attacker's perspective. A systematic approach to security requirements engineering is crucial to avoid this problem.
Requirements engineering defects can cost 10 to 200 times more to correct once the system is operational. Software development takes place in a dynamic environment, causing requirements to constantly change.
module-4.1-Class notes_R and DD_basket-IV -.pdf
module-4.1-Class notes_R and DD_basket-IV -.pdfritikkumarchaudhury7
╠²
About Quick, merge and Binary search.Protecting Secrets in Transparent Systems
Protecting Secrets in Transparent SystemsLucaBarbaro3
╠²
Invited talk for the Theories in Information Systems seminar-series course at the Utrecht UniversityIntroduction to 3D Printing Technology.pptx
Introduction to 3D Printing Technology.pptxpprakash21252
╠²
Welcome to our presentation on 3D printing technology, where we explore the transformative power of this innovative manufacturing process. Also known as additive manufacturing, 3D printing has been gaining momentum in recent years, and its potential to revolutionize industries is vast.
In this presentation, we delve into the world of 3D printing, discussing its history, principles, and applications. We examine the various types of 3D printing technologies, including Fused Deposition Modeling (FDM), Stereolithography (SLA), and Selective Laser Sintering (SLS). We also explore the advantages and limitations of 3D printing, including its ability to create complex geometries, reduce material waste, and increase product customization.
One of the most significant impacts of 3D printing is its potential to transform industries. We discuss the applications of 3D printing in various sectors, including aerospace, automotive, healthcare, and consumer products. We examine case studies of companies that have successfully implemented 3D printing, such as Boeing, BMW, and Procter & Gamble.
The presentation also explores the future of 3D printing, including emerging trends and technologies. We discuss the potential of 3D printing to disrupt traditional supply chains and create new business models. We also examine the challenges and limitations of 3D printing, including the need for standardization, regulation, and education.
This presentation is ideal for anyone interested in learning about 3D printing technology, including students, researchers, entrepreneurs, and industry professionals. Whether you are looking to gain a basic understanding of 3D printing or seeking to explore its applications in various industries, this presentation is a valuable resource.
UHV UNIT-3 HARMONY IN THE FAMILY AND SOCIETY.pptx
UHV UNIT-3 HARMONY IN THE FAMILY AND SOCIETY.pptxariomthermal2031
╠²
HARMONY IN THE FAMILY AND SOCIETY NBA Criteria TIER I and TIER II Comparison
NBA Criteria TIER I and TIER II ComparisonDr INBAMALAR T M
╠²
Document Preparation for NBA
Self Assessment Report (SAR) Tier I Formats


┘ģ┘Ŗ┘āž¦┘å┘Ŗ┘āž¦ ž╣ž¦┘ģ┘ć ┘łžĄ┘Ŗž¦┘åž® ž¬┘łž▒ž©┘Ŗ┘垦ž¬ ( žĘž©ž¦ž╣ž®)kkkjjj kkkkk .pptx
┘ģ┘Ŗ┘āž¦┘å┘Ŗ┘āž¦ ž╣ž¦┘ģ┘ć ┘łžĄ┘Ŗž¦┘åž® ž¬┘łž▒ž©┘Ŗ┘垦ž¬ ( žĘž©ž¦ž╣ž®)kkkjjj kkkkk .pptxzeidali3
╠²
mechanical

Water Industry Process Automation & Control Monthly - April 2025
Water Industry Process Automation & Control Monthly - April 2025Water Industry Process Automation & Control
╠²
Welcome to the April 2025 edition of WIPAC Monthly, the magazine brought to you by the LInkedIn Group Water Industry Process Automation & Control.
In this month's issue, along with all of the industries news we have a number of great articles for your edification
The first article is my annual piece looking behind the storm overflow numbers that are published each year to go into a bit more depth and look at what the numbers are actually saying.
The second article is a taster of what people will be seeing at the SWAN Annual Conference next month in Berlin and looks at the use of fibre-optic cable for leak detection and how its a technology we should be using more of
The third article, by Rob Stevens, looks at what the options are for the Continuous Water Quality Monitoring that the English Water Companies will be installing over the next year and the need to ensure that we install the right technology from the start.
Hope you enjoy the current edition,
Oliver
Telehealth technology ŌĆō A new horizon in health care
Telehealth technology ŌĆō A new horizon in health careDr INBAMALAR T M
╠²
Telehealth technology ŌĆō A new horizon in health care, Telemedicine, E-health

Call for Papers - 6th International Conference on Big Data and Machine Learni...
Call for Papers - 6th International Conference on Big Data and Machine Learni...IJDKP
╠²
6th International Conference on Big Data and Machine Learning (BDML 2025) will act as a major forum for the presentation of innovative ideas, approaches, developments, and research projects in the areas of Big Data and Machine Learning. It will also serve to facilitate the exchange of information between researchers and industry professionals to discuss the latest issues and advancement in the area of Big Data and Machine Learning.
Production Planning & Control and Inventory Management.pptx
Production Planning & Control and Inventory Management.pptxVirajPasare
╠²
Production Planning and Control : Importance, Objectives and Functions . Inventory Management - Meaning, Types , Objectives, Selective Inventory Control : ABC Analysise-health to improve the effectiveness of the Healthcare system
e-health to improve the effectiveness of the Healthcare systemDr INBAMALAR T M
╠²
e-health to improve the effectiveness of the Healthcare system, Telehealth technology ŌĆō A new horizon in health care, Telemedicine, E-healthWater Industry Process Automation & Control Monthly - April 2025
Water Industry Process Automation & Control Monthly - April 2025Water Industry Process Automation & Control
╠²
Introduction-to-Robotics-PowerPoint-Presentation-on-Robotics.ppt
- 2. ’é¦ Robot and Robotics technologies represented a practical applications of physics, computer science, engineering and mathematics. ’é¦ It provides a very powerful and flexible approach to demonstrate a variety of engineering concept.
- 3. ŌĆ£An electrical or mechanical or electromechanical, programmable or non programmable multifunctional manipulator designed to move material, parts, tools, or specialized devices through various programmed motions for the performance of a variety of tasksŌĆØ A robot is a mechanical or virtual, artificial agent. It is usually an electromechanical system.
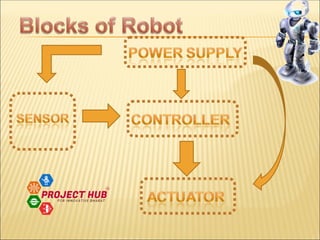
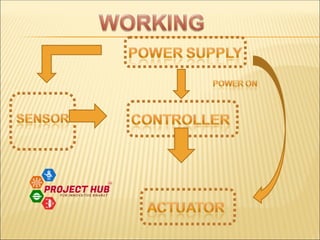
- 7. Sensor: A device which provides information about the physical world. A sensor is a device that measures a physical quantity and converts it into a signal which can be read by an observer or by an instrument.
- 8. IR sensor Sound sensor Temperature sensor Ultrasonic sensor LDR Smoke sensor PIR sensor Humidity sensor Magnetic field EtcŌĆ”ŌĆ”ŌĆ”.
- 9. This is also know as brain of the robot. Here we are using arduino uno microcontroller as a controller unit of robot. The Arduino Uno is a microcontroller board based on the ATmega328. Controller unit receive the signal from sensor and drives the actuators.
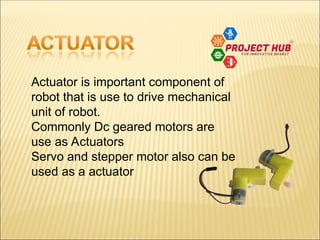
- 10. Actuator is important component of robot that is use to drive mechanical unit of robot. Commonly Dc geared motors are use as Actuators Servo and stepper motor also can be used as a actuator
- 12. ŌĆó Industrial robots (which can be re-programmed) are used extensively in factories to weld, paint, lift and transport goods in place of humans ŌĆó The car manufacturing industry is a good example. Robots weld and fit car components to new vehicles Current Robotic Technologies
- 13. ŌĆó Large organisations and companies reap many benefits from robotic technologies because: ŌĆó Robots are less expensive than paying human workers over the long run and robots are not prone to injure themselves. Current Robotic Technologies
- 14. ŌĆó Robots are used internationally by Police, Army, Navy and Air force organisations ŌĆó Robotic technology is used to deal with hazardous situations such as dealing with suspicious packages, riots and for the collection of foreign intelligence ŌĆó NASA scientists use robotic technologies (Mars Explorer) to explore other planets Robots are currently used for situations where human safety is an issue
- 15. ŌĆóRepetitive tasks ŌĆóHigh speed ŌĆóHigh precision movements ŌĆóPre-planned trajectories and task policies ŌĆóAutomated and no human interference required
- 16. ’āÆ MATRIX ’āÆ I-ROBOT ’āÆ TERMINATOR
- 17. ’āÆ ASIMO is a humanoid robot created by Honda. ASIMO was created at HondaŌĆÖs Research & Development Wako Fundamental Technical Research Center in Japan. ’āÆ The name ASIMO is an acronym for ŌĆ£Advanced Step in Innovative MobilityŌĆØ.
- 18. Although most robots in use today are designed for specific tasks, the goal is to make universal robots, robots flexible enough to do just about anything a human can do.