Me330 lecture1
Download as ppt, pdf1 like296 views

This document provides an overview and logistics for an ME 330 Control Systems course. It introduces the instructor, textbook, grading breakdown, software to be used, and course objectives. Key points are: - Lectures on Mondays and Wednesdays from 7-8pm, labs on Tuesdays and Thursdays from 5:30-7pm - The course aims to help students recognize, model, analyze, and design control systems using mathematical tools - Control systems regulate processes using inputs, outputs, and feedback to handle disturbances
1 of 10
Download to read offline
![Course Logistics Lecture: M,W 19:00 – 20:00, GMCS-102 or 301 Lab: T,Th 17:30 – 19:00, E-301 Instructor: Dr. Matthew Graham [email_address] TA: Eric Miller [email_address] Office Hrs: M,W after class](https://image.slidesharecdn.com/me330lecture1-110223225028-phpapp01/85/Me330-lecture1-2-320.jpg)
Ad
Recommended
Mis
MisManish Kumar Aery
Ěý
The document defines a system as a set of independent components that work together to achieve a specific goal. The key elements of any system are identified as input, processor, output, and feedback/control. Five common characteristics of systems are also outlined: organization, interaction, interdependence, integration, and a central objective. Different types of systems are described, such as conceptual vs physical, natural vs artificial, and open vs closed systems.Meeting w1 chapter 1
Meeting w1 chapter 1Hattori Sidek
Ěý
This document provides an overview of control systems, including:
- Defining the basic components and configurations of control systems
- Describing open-loop and closed-loop systems, their advantages and disadvantages
- Classifying control systems as single-input single-output, multiple-input multiple-output, linear, non-linear, time-variant, or time-invariant
- Outlining a 6-step general process for designing a control system
- Assigning an activity for students to describe the operation of a control system from a selected sector by reverse engineering it according to the design stepsFinal j314 slideshow yunker
Final j314 slideshow yunkerAndrew Yunker
Ěý
The document summarizes Greek life houses located on College Street at Ohio University, known as Greek Row. It describes the layout of fraternity and sorority houses from one end of College Street to the other, providing details about each house such as notable amenities, traditions, and historical facts. Residents of the houses enjoy meals provided by cooks, courtyards, sunbathing decks, and large rooms with bunk beds. Parties occur frequently at some houses despite rules against alcohol.Me330 lecture5
Me330 lecture5Andy Norris
Ěý
This document discusses modeling mechanical systems for control systems. It covers:
1) Newton's second law governs mechanical systems and results in equations of motion describing dynamical systems. These equations can be represented using block diagrams and Laplace transforms.
2) Modeling involves determining the equation of motion using free body diagrams and summing the forces. Mechanical components like springs, dampers and masses have characteristic force-velocity, force-displacement and impedance relationships.
3) Systems with multiple degrees of freedom require equations of motion equal to the number of independent motions. Transfer functions can be derived from the Laplace transform of the equations of motion.Me330 lecture3
Me330 lecture3Andy Norris
Ěý
This document discusses the process of solving differential equations representing dynamical systems using Laplace transforms. It involves 4 main steps: 1) Represent the differential equation in the Laplace domain as a "transfer function", 2) Transform the input function to the Laplace domain, 3) Multiply the transfer function by the input function, 4) Take the inverse Laplace transform to find the time domain response. It also discusses partial fraction expansion, which simplifies functions for taking the inverse Laplace transform using lookup tables. There are three cases for partial fraction expansion depending on the roots of the denominator polynomial.Management Cartoon
Management CartoonJuan Gabriel Rios Montelongo
Ěý
The document provides advice on revenue management systems through cartoons and sayings. It suggests embracing automation but setting realistic deadlines. Testing solutions thoroughly by considering different customer needs and situations. Forecasting and optimization require complex tools and not all presentations will succeed, so support from online help and expertise in different situations can be useful. Select the most important attributes to focus modeling efforts and remember that while math is helpful, usability and testing are also critical.Me330 lecture4
Me330 lecture4Andy Norris
Ěý
1. The document discusses different cases for taking the inverse Laplace transform of a function F(s), depending on the characteristics of the denominator of F(s).
2. If the denominator has real and distinct roots, one multiplies F(s) by the appropriate term and evaluates the residue at each root to find the inverse Laplace transform.
3. If there are real repeated roots, one multiplies F(s) by the appropriate power and differentiates to find all residues needed for the inverse Laplace transform.
4. If there are complex roots, one solves for the residues by balancing coefficients or factorizing, then combines like terms to find the inverse Laplace transform.Me330 lecture2
Me330 lecture2Andy Norris
Ěý
1) The document discusses complex numbers and the Laplace transform, which can convert differential equations describing dynamic systems into algebraic equations.
2) The Laplace transform represents functions in the complex s-domain and allows converting between the time and frequency domains.
3) The Laplace transform is a useful mathematical tool for control systems analysis and design by representing systems as transfer functions and enabling calculation of time-domain responses from frequency-domain inputs.01 Introduction to System Dynamics
01 Introduction to System Dynamicsiddbbi
Ěý
This document provides an introduction to system dynamics. It defines a system as a collection of interacting components with defined boundaries and inputs/outputs. Dynamic systems change over time even if inputs are constant, while static systems only depend on current inputs. Common dynamic systems include mechanical, electrical, thermal, and fluid systems. System dynamics involves defining a system, creating a mathematical model, simulating the model's behavior, and making recommendations. Models allow studying systems without experimenting on real systems. Simulation uses models to compute how systems react to inputs over time.Automatic control 1 reduction block .pdf
Automatic control 1 reduction block .pdfssuser029aa3
Ěý
The document provides an overview of a course on automatic control systems, detailing grading distribution and course content including system modeling and PID design. It outlines specific learning outcomes related to mathematical modeling, system stability, and various control techniques. Additionally, it defines key concepts such as dynamic systems, simulation, and modeling relevant to the field of automatic control.Robotics lec 5
Robotics lec 5Mahmoud Hussein
Ěý
This document provides an overview of control systems and modeling approaches. It defines key concepts in control systems like controlled variables, manipuated variables, and disturbances. It also describes different modeling approaches like black box, grey box, and white box models. Finally, it discusses modeling DC motors as an example and different types of controllers like P, PI, and PD that can be used for position control of DC motors.MECH370hshsjahb skshbskd djdbhdjd jdjd.pdf
MECH370hshsjahb skshbskd djdbhdjd jdjd.pdfMicahSileshi
Ěý
The document outlines the course MECH 370, focusing on the modeling, simulation, and analysis of physical systems in engineering. It introduces methods for predicting dynamic behavior, mathematical modeling, and the use of software tools like MATLAB/Simulink. The course covers various system types, modeling processes, and analysis techniques, providing a foundational understanding for students in engineering disciplines.MECH370_S07_L1Modellinbvhjbvghj bffjbfgvccg,.pdf
MECH370_S07_L1Modellinbvhjbvghj bffjbfgvccg,.pdfMicahSileshi
Ěý
The document outlines the course MECH 370, which focuses on modeling, simulation, and analysis of dynamic physical systems, covering various engineering components such as mechanical, electrical, thermal, and fluid elements. It provides a course structure that includes definitions, classifications, and methods for creating mathematical models, alongside the use of software tools like MATLAB/Simulink for simulations. The course aims to equip students with skills to analyze system behaviors and build models from first principles.System dynamics ch 1
System dynamics ch 1Hamzah Alqahtani
Ěý
This document provides an introduction to system dynamics and mathematical modeling of dynamic systems. It defines key concepts such as:
- A system is made up of interacting components that work together to achieve an objective. It has inputs from the environment and outputs responses to those inputs.
- Dynamic systems have outputs that vary over time even if inputs are held constant, due to internal feedback loops within the system.
- Mathematical models of dynamic systems use equations, often differential equations, to describe the system's behavior based on physical laws. The accuracy of a model's predictions depends on how well it approximates the real system.
- Engineering systems like mechanical, electrical, thermal and fluid systems can all be modeled as dynamic systems using appropriate equationsControl engineering module 1 part-a 18me71
Control engineering module 1 part-a 18me71Mohammed Imran
Ěý
The document outlines a control engineering course (code 18ME71) designed for mechanical engineering students, focusing on modern control theory and system analysis skills. The course encompasses various control system components, their applications, and classifications, detailing the objectives, learning outcomes, and curriculum structure. It also discusses the significance of control systems in everyday life, industry, and advanced technologies.PE-3032_Lecture_01.pptx
PE-3032_Lecture_01.pptxgeremu2
Ěý
This document provides an overview of a control systems engineering course. It outlines the course syllabus which covers classical and modern control techniques including modeling, analysis in the time and frequency domains, and controller design methods. The general content includes system modeling, analysis of open and closed loop systems, stability analysis, and compensation techniques. Recommended textbooks are provided and prerequisites of differential equations, linear algebra, and basic physics systems are listed. Finally, basic definitions of elements in a control system including controllers, actuators, sensors, and the design process are introduced.Introduction to System Analysis and Design - Cybernetics Robo Academy
Introduction to System Analysis and Design - Cybernetics Robo AcademyTutulAhmed3
Ěý
This document provides an introduction and overview of system analysis and design. It defines a system as a collection of interrelated components that function together to achieve an outcome. The key characteristics of a system are described as organization, interaction, interdependence, integration, and a central objective. The basic elements of a system are defined as inputs, outputs, processors, control, feedback, environment, and boundaries/interfaces. Different types of systems like physical/abstract and open/closed systems are discussed. The document also introduces system analysis and design, and different systems models like schematic, flow, static, and dynamic models. Recommended reference books on the topic are also provided.Control systemengineering notes.pdf
Control systemengineering notes.pdfk vimal kumar
Ěý
This document provides a syllabus for a course on Control System Engineering-I. It covers various topics related to control systems including an introduction to control systems, feedback characteristics and sensitivity measures, control system components, time domain performance analysis, stability analysis, root locus technique, and frequency domain analysis. The syllabus is intended to teach students the basic concepts, classifications, components, analysis techniques, and design aspects of control systems. It disclaims any original content and states that the information is a collection from various sources for teaching purposes only.lecture1423904331 (1).pdf
lecture1423904331 (1).pdfDivya Somashekar
Ěý
This document provides a syllabus for a course on Control System Engineering-I. It covers various topics related to control systems including an introduction to control systems, feedback characteristics and sensitivity measures, control system components, time domain performance analysis, stability analysis, root locus technique, and frequency domain analysis. The syllabus is intended to teach students the basic concepts, classifications, components, analysis techniques, and design aspects of linear control systems. It disclaims any original content and states that the information is a collection from various sources for teaching purposes only.lecture1423904331 (1).pdf
lecture1423904331 (1).pdfDivya Somashekar
Ěý
The document provides a syllabus for the course "Control System Engineering-I". It covers topics such as introduction to control systems, feedback characteristics, control system components, time domain performance analysis, stability analysis, root locus technique, and frequency domain analysis. The syllabus aims to teach students about modeling and analyzing linear time-invariant control systems. Key concepts covered include transfer functions, block diagrams, time response analysis, stability criteria, root locus plots, and frequency response methods. The overall goal is for students to understand analysis and design of basic linear feedback control systems.system
systemSaranya Dhanesh Kumar
Ěý
The document outlines the concepts related to systems, emphasizing the definition of a system as a set of interrelated components aimed at achieving a common goal through input-output transformation processes. It discusses different types of systems, system analysis, management stages, and the System Development Life Cycle (SDLC), while also concerning itself with information systems, control mechanisms, and the importance of feedback loops. Additionally, it categorizes systems based on natural vs. human-made distinctions, architecture, and various operational characteristics, such as formal vs. informal information systems.2. Feed forward system.pptx
2. Feed forward system.pptxAMSuryawanshi
Ěý
The document provides an overview of a control system engineering session presented by Mr. A. M. Suryawanshi, covering basic concepts such as tracking, regulator systems, feedforward systems, and transfer functions. It outlines the differences between feedback and feedforward systems and discusses their respective characteristics and applications. Additionally, it highlights student evaluation questions and the modeling of electrical and mechanical systems.ME416A_Module 1.pdf
ME416A_Module 1.pdfMECHANICALENGINEERIN55
Ěý
The document provides an introduction to control systems, including:
- Control systems are integral parts of modern society and are found in applications like rockets, manufacturing machines, and self-driving vehicles.
- The chapter defines a control system and describes their basic features and configurations, including open-loop and closed-loop systems.
- The objectives of control system analysis and design are described as producing the desired transient response, reducing steady-state error, and achieving stability.
- The design process for control systems is outlined in six steps: determining requirements, drawing block diagrams, creating schematics, developing mathematical models, reducing block diagrams, and analyzing and designing the system.Control systems
Control systems Dr.YNM
Ěý
The document provides an overview of control systems, defining them as interconnections of components designed to regulate output in accordance with input signals. It distinguishes between open-loop and closed-loop systems, outlining their components, advantages, and examples, such as washing machines (open-loop) and air conditioners (closed-loop). Additionally, the document discusses block diagram representation, types of systems, and the significance of transfer functions in analyzing system performance.Introduction to material Engineering 2KIU.pdf
Introduction to material Engineering 2KIU.pdfMohammedBuhariDahiru
Ěý
The document provides an introduction to a course on control systems. It outlines the administration of the course including the lecturers, timetable, and assessment. Four lecturers will teach various aspects of the course over two semesters. The timetable details the weekly topics that will be covered. Assessment includes exams, practical work, tutorials, and a final project. Linear time-invariant systems are discussed as the basis for modeling control systems. Their key properties of homogeneity, superposition, and time-invariance allow such systems to be solved.Dlh+dk chapter 1
Dlh+dk chapter 1HĆ°ng Bin
Ěý
This document outlines the course objectives, topics, and structure for a System Dynamics and Controls course taught by Dr. Nguyen Duy Anh. The course aims to help students understand system modeling, analysis, stability, and controller design. Key topics include transfer functions, root locus, state space modeling, and PID control. The course consists of 8 chapters, homework assignments, midterm and final exams, and student feedback. The grading scheme is also provided.L2_Dynamics Overview.pdf
L2_Dynamics Overview.pdfShakirUllah78
Ěý
The document discusses dynamic systems and modeling dynamic systems. It provides examples of dynamic systems from various domains like mechanical, electrical, biological, and economic systems. It defines dynamic systems as systems where the present output depends on both present and past inputs. The document discusses modeling dynamic systems using mathematical models and provides guidelines for formulating control-oriented models, including defining the objective, system boundaries, relevant stocks, conservation laws, and relations between flows and levels. It provides examples of modeling a room's thermal dynamics and a vehicle's motion and energy consumption.More Related Content
Similar to Me330 lecture1 (20)
01 Introduction to System Dynamics
01 Introduction to System Dynamicsiddbbi
Ěý
This document provides an introduction to system dynamics. It defines a system as a collection of interacting components with defined boundaries and inputs/outputs. Dynamic systems change over time even if inputs are constant, while static systems only depend on current inputs. Common dynamic systems include mechanical, electrical, thermal, and fluid systems. System dynamics involves defining a system, creating a mathematical model, simulating the model's behavior, and making recommendations. Models allow studying systems without experimenting on real systems. Simulation uses models to compute how systems react to inputs over time.Automatic control 1 reduction block .pdf
Automatic control 1 reduction block .pdfssuser029aa3
Ěý
The document provides an overview of a course on automatic control systems, detailing grading distribution and course content including system modeling and PID design. It outlines specific learning outcomes related to mathematical modeling, system stability, and various control techniques. Additionally, it defines key concepts such as dynamic systems, simulation, and modeling relevant to the field of automatic control.Robotics lec 5
Robotics lec 5Mahmoud Hussein
Ěý
This document provides an overview of control systems and modeling approaches. It defines key concepts in control systems like controlled variables, manipuated variables, and disturbances. It also describes different modeling approaches like black box, grey box, and white box models. Finally, it discusses modeling DC motors as an example and different types of controllers like P, PI, and PD that can be used for position control of DC motors.MECH370hshsjahb skshbskd djdbhdjd jdjd.pdf
MECH370hshsjahb skshbskd djdbhdjd jdjd.pdfMicahSileshi
Ěý
The document outlines the course MECH 370, focusing on the modeling, simulation, and analysis of physical systems in engineering. It introduces methods for predicting dynamic behavior, mathematical modeling, and the use of software tools like MATLAB/Simulink. The course covers various system types, modeling processes, and analysis techniques, providing a foundational understanding for students in engineering disciplines.MECH370_S07_L1Modellinbvhjbvghj bffjbfgvccg,.pdf
MECH370_S07_L1Modellinbvhjbvghj bffjbfgvccg,.pdfMicahSileshi
Ěý
The document outlines the course MECH 370, which focuses on modeling, simulation, and analysis of dynamic physical systems, covering various engineering components such as mechanical, electrical, thermal, and fluid elements. It provides a course structure that includes definitions, classifications, and methods for creating mathematical models, alongside the use of software tools like MATLAB/Simulink for simulations. The course aims to equip students with skills to analyze system behaviors and build models from first principles.System dynamics ch 1
System dynamics ch 1Hamzah Alqahtani
Ěý
This document provides an introduction to system dynamics and mathematical modeling of dynamic systems. It defines key concepts such as:
- A system is made up of interacting components that work together to achieve an objective. It has inputs from the environment and outputs responses to those inputs.
- Dynamic systems have outputs that vary over time even if inputs are held constant, due to internal feedback loops within the system.
- Mathematical models of dynamic systems use equations, often differential equations, to describe the system's behavior based on physical laws. The accuracy of a model's predictions depends on how well it approximates the real system.
- Engineering systems like mechanical, electrical, thermal and fluid systems can all be modeled as dynamic systems using appropriate equationsControl engineering module 1 part-a 18me71
Control engineering module 1 part-a 18me71Mohammed Imran
Ěý
The document outlines a control engineering course (code 18ME71) designed for mechanical engineering students, focusing on modern control theory and system analysis skills. The course encompasses various control system components, their applications, and classifications, detailing the objectives, learning outcomes, and curriculum structure. It also discusses the significance of control systems in everyday life, industry, and advanced technologies.PE-3032_Lecture_01.pptx
PE-3032_Lecture_01.pptxgeremu2
Ěý
This document provides an overview of a control systems engineering course. It outlines the course syllabus which covers classical and modern control techniques including modeling, analysis in the time and frequency domains, and controller design methods. The general content includes system modeling, analysis of open and closed loop systems, stability analysis, and compensation techniques. Recommended textbooks are provided and prerequisites of differential equations, linear algebra, and basic physics systems are listed. Finally, basic definitions of elements in a control system including controllers, actuators, sensors, and the design process are introduced.Introduction to System Analysis and Design - Cybernetics Robo Academy
Introduction to System Analysis and Design - Cybernetics Robo AcademyTutulAhmed3
Ěý
This document provides an introduction and overview of system analysis and design. It defines a system as a collection of interrelated components that function together to achieve an outcome. The key characteristics of a system are described as organization, interaction, interdependence, integration, and a central objective. The basic elements of a system are defined as inputs, outputs, processors, control, feedback, environment, and boundaries/interfaces. Different types of systems like physical/abstract and open/closed systems are discussed. The document also introduces system analysis and design, and different systems models like schematic, flow, static, and dynamic models. Recommended reference books on the topic are also provided.Control systemengineering notes.pdf
Control systemengineering notes.pdfk vimal kumar
Ěý
This document provides a syllabus for a course on Control System Engineering-I. It covers various topics related to control systems including an introduction to control systems, feedback characteristics and sensitivity measures, control system components, time domain performance analysis, stability analysis, root locus technique, and frequency domain analysis. The syllabus is intended to teach students the basic concepts, classifications, components, analysis techniques, and design aspects of control systems. It disclaims any original content and states that the information is a collection from various sources for teaching purposes only.lecture1423904331 (1).pdf
lecture1423904331 (1).pdfDivya Somashekar
Ěý
This document provides a syllabus for a course on Control System Engineering-I. It covers various topics related to control systems including an introduction to control systems, feedback characteristics and sensitivity measures, control system components, time domain performance analysis, stability analysis, root locus technique, and frequency domain analysis. The syllabus is intended to teach students the basic concepts, classifications, components, analysis techniques, and design aspects of linear control systems. It disclaims any original content and states that the information is a collection from various sources for teaching purposes only.lecture1423904331 (1).pdf
lecture1423904331 (1).pdfDivya Somashekar
Ěý
The document provides a syllabus for the course "Control System Engineering-I". It covers topics such as introduction to control systems, feedback characteristics, control system components, time domain performance analysis, stability analysis, root locus technique, and frequency domain analysis. The syllabus aims to teach students about modeling and analyzing linear time-invariant control systems. Key concepts covered include transfer functions, block diagrams, time response analysis, stability criteria, root locus plots, and frequency response methods. The overall goal is for students to understand analysis and design of basic linear feedback control systems.system
systemSaranya Dhanesh Kumar
Ěý
The document outlines the concepts related to systems, emphasizing the definition of a system as a set of interrelated components aimed at achieving a common goal through input-output transformation processes. It discusses different types of systems, system analysis, management stages, and the System Development Life Cycle (SDLC), while also concerning itself with information systems, control mechanisms, and the importance of feedback loops. Additionally, it categorizes systems based on natural vs. human-made distinctions, architecture, and various operational characteristics, such as formal vs. informal information systems.2. Feed forward system.pptx
2. Feed forward system.pptxAMSuryawanshi
Ěý
The document provides an overview of a control system engineering session presented by Mr. A. M. Suryawanshi, covering basic concepts such as tracking, regulator systems, feedforward systems, and transfer functions. It outlines the differences between feedback and feedforward systems and discusses their respective characteristics and applications. Additionally, it highlights student evaluation questions and the modeling of electrical and mechanical systems.ME416A_Module 1.pdf
ME416A_Module 1.pdfMECHANICALENGINEERIN55
Ěý
The document provides an introduction to control systems, including:
- Control systems are integral parts of modern society and are found in applications like rockets, manufacturing machines, and self-driving vehicles.
- The chapter defines a control system and describes their basic features and configurations, including open-loop and closed-loop systems.
- The objectives of control system analysis and design are described as producing the desired transient response, reducing steady-state error, and achieving stability.
- The design process for control systems is outlined in six steps: determining requirements, drawing block diagrams, creating schematics, developing mathematical models, reducing block diagrams, and analyzing and designing the system.Control systems
Control systems Dr.YNM
Ěý
The document provides an overview of control systems, defining them as interconnections of components designed to regulate output in accordance with input signals. It distinguishes between open-loop and closed-loop systems, outlining their components, advantages, and examples, such as washing machines (open-loop) and air conditioners (closed-loop). Additionally, the document discusses block diagram representation, types of systems, and the significance of transfer functions in analyzing system performance.Introduction to material Engineering 2KIU.pdf
Introduction to material Engineering 2KIU.pdfMohammedBuhariDahiru
Ěý
The document provides an introduction to a course on control systems. It outlines the administration of the course including the lecturers, timetable, and assessment. Four lecturers will teach various aspects of the course over two semesters. The timetable details the weekly topics that will be covered. Assessment includes exams, practical work, tutorials, and a final project. Linear time-invariant systems are discussed as the basis for modeling control systems. Their key properties of homogeneity, superposition, and time-invariance allow such systems to be solved.Dlh+dk chapter 1
Dlh+dk chapter 1HĆ°ng Bin
Ěý
This document outlines the course objectives, topics, and structure for a System Dynamics and Controls course taught by Dr. Nguyen Duy Anh. The course aims to help students understand system modeling, analysis, stability, and controller design. Key topics include transfer functions, root locus, state space modeling, and PID control. The course consists of 8 chapters, homework assignments, midterm and final exams, and student feedback. The grading scheme is also provided.L2_Dynamics Overview.pdf
L2_Dynamics Overview.pdfShakirUllah78
Ěý
The document discusses dynamic systems and modeling dynamic systems. It provides examples of dynamic systems from various domains like mechanical, electrical, biological, and economic systems. It defines dynamic systems as systems where the present output depends on both present and past inputs. The document discusses modeling dynamic systems using mathematical models and provides guidelines for formulating control-oriented models, including defining the objective, system boundaries, relevant stocks, conservation laws, and relations between flows and levels. It provides examples of modeling a room's thermal dynamics and a vehicle's motion and energy consumption.Me330 lecture1
- 1. ME 330 Control Systems SP 2011 Lecture 1
- 2. Course Logistics Lecture: M,W 19:00 – 20:00, GMCS-102 or 301 Lab: T,Th 17:30 – 19:00, E-301 Instructor: Dr. Matthew Graham [email_address] TA: Eric Miller [email_address] Office Hrs: M,W after class
- 3. Syllabus Textbook: N. S. Nise, Control Systems Engineering , 6th edition, Wiley Inc., 2010 Lecture notes Grading: Homework 25% Lab Work: 25% Exam(s): 20% Final: 30% Course ethics discussion
- 4. Software (Available in lab E-301)
- 5. Biography Undergrad: Loyola Marymount Univ. Grad: UCSD, Mechanical Engineering Hard Disk Drives, Control Theory Current: Algorithms Engineer @ Cymer
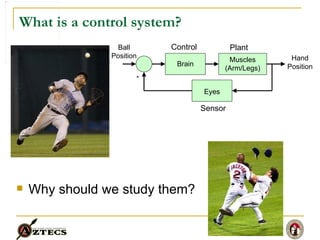
- 6. What is a control system? Why should we study them? Brain Muscles (Arm/Legs) Hand Position Ball Position Eyes - Control Plant Sensor
- 7. Objectives Recognize and model control systems in mathematical framework Analyze control systems stability performance criteria Design control systems tools for development
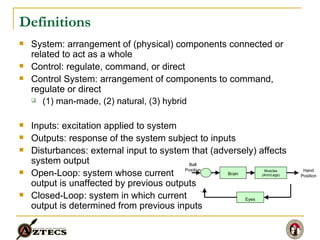
- 8. Definitions System: arrangement of (physical) components connected or related to act as a whole Control: regulate, command, or direct Control System: arrangement of components to command, regulate or direct (1) man-made, (2) natural, (3) hybrid Inputs: excitation applied to system Outputs: response of the system subject to inputs Disturbances: external input to system that (adversely) affects system output Open-Loop: system whose current output is unaffected by previous outputs Closed-Loop: system in which current output is determined from previous inputs Brain Muscles (Arm/Legs) Hand Position Ball Position Eyes -
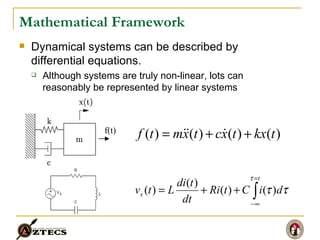
- 9. Mathematical Framework Dynamical systems can be described by differential equations. Although systems are truly non-linear, lots can reasonably be represented by linear systems f(t)
- 10. Homework Review Laplace transforms, section 2.2