±·°Õ±õ°ä¤ĻŗĪ¤ņ¼ĘĖ椷¤Ę¤¤¤ė¤Ī¤«
0 likes4,330 views

Non-trivial information closure (Bertschinger et al. (2006) "Information and closure in systems theory")¤Ė¤Ä¤¤¤ĘÕ{¤Ł¤Ę¤ß¤æ¤Ī¤Ē¤Ž¤Č¤į¤Ž¤·¤æ”£








![[DLŻÕi»į]Control as Inference¤Č°kÕ¹](https://cdn.slidesharecdn.com/ss_thumbnails/20191004-191204055019-thumbnail.jpg?width=560&fit=bounds)















![SSII2021 [OS2-01] ÜŅĘѧĮ¤Ī»łµA£ŗ®¤Ź¤ė„愹„ƤĪÖŖ×R¤ņĄūÓƤ¹¤ė¤æ¤į¤ĪCŠµŃ§Į¤Ī·½·Ø](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=560&fit=bounds)

![[DLŻÕi»į]`»ÆѧĮ¤Ī¤æ¤į¤ĪדB±ķ¬FѧĮ £¤č¤źĮ¼¤¤”øŹĄ½ē„ā„Ē„ė”¹¤Ī«@µĆ¤ĖĻņ¤±¤Ę£](https://cdn.slidesharecdn.com/ss_thumbnails/20181026staterepresenration-181127055206-thumbnail.jpg?width=560&fit=bounds)

![[DLŻÕi»į]SlowFast Networks for Video Recognition](https://cdn.slidesharecdn.com/ss_thumbnails/20191206slowfastnetworkkuboshizuma-191206010601-thumbnail.jpg?width=560&fit=bounds)


More Related Content
What's hot (20)
More from Masatoshi Yoshida (20)


















±·°Õ±õ°ä¤ĻŗĪ¤ņ¼ĘĖ椷¤Ę¤¤¤ė¤Ī¤«
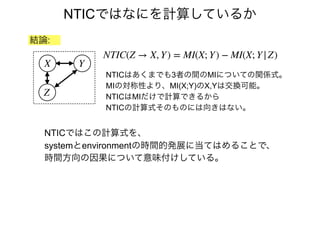
- 1. NTIC¤Ē¤Ļ¤Ź¤Ė¤ņÓĖ椷¤Ę¤¤¤ė¤« NTIC¤Ļ¤¢¤Æ¤Ž¤Ē¤ā3ÕߤĪég¤ĪMI¤Ė¤Ä¤¤¤Ę¤ĪévSŹ½”£ MI¤Ī³ĘŠŌ¤č¤ź”¢MI(X;Y)¤ĪX,Y¤Ļ½»QæÉÄÜ”£ NTIC¤ĻMI¤Ą¤±¤ĒÓĖć¤Ē¤¤ė¤«¤é NTIC¤ĪÓĖćŹ½¤½¤Ī¤ā¤Ī¤Ė¤ĻĻņ¤¤Ļ¤Ź¤¤”£ NTIC(Z ”ś X, Y) = MI(X; Y) ? MI(X; Y|Z) NTIC¤Ē¤Ļ¤³¤ĪÓĖćŹ½¤ņ”¢ system¤Čenvironment¤ĪrégµÄ°kÕ¹¤Ėµ±¤Ę¤Ļ¤į¤ė¤³¤Č¤Ē”¢ rég·½Ļņ¤ĪŅņ¹ū¤Ė¤Ä¤¤¤ĘŅāĪ¶ø¶¤±¤·¤Ę¤¤¤ė”£ X Y Z ½YÕ:
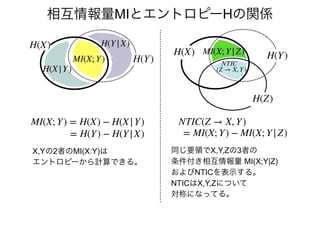
- 2. MI(X; Y) H(Y|X) H(X|Y) H(X) H(Y) X,Y¤Ī2ÕߤĪMI(X:Y)¤Ļ „Ø„ó„Č„ķ„Ō©`¤«¤éÓĖć¤Ē¤¤ė”£ MI(X; Y) = H(X) ? H(X|Y) = H(Y) ? H(Y|X) Ļą»„ĒéóĮæMI¤Č„Ø„ó„Č„ķ„Ō©`H¤ĪévS H(X) H(Y) H(Z) MI(X; Y|Z) NTIC (Z ”ś X, Y) = MI(X; Y) ? MI(X; Y|Z) NTIC(Z ”ś X, Y) Ķ¬¤øŅŖīI¤ĒX,Y,Z¤Ī3ÕߤĪ Ģõ¼žø¶¤Ļą»„ĒéóĮæ MI(X;Y|Z) ¤Ŗ¤č¤ÓNTIC¤ņ±ķŹ¾¤¹¤ė”£ NTIC¤ĻX,Y,Z¤Ė¤Ä¤¤¤Ę ³Ę¤Ė¤Ź¤Ć¤Ę¤ė”£
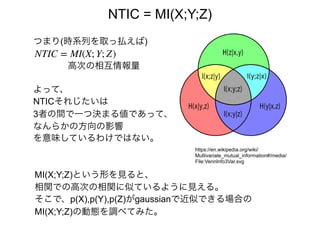
- 3. ¤Ä¤Ž¤ź(rĻµĮŠ¤ņČ”¤ĆB¤Ø¤Š) https://en.wikipedia.org/wiki/ Multivariate_mutual_information#/media/ File:VennInfo3Var.svg NTIC = MI(X;Y;Z) MI(X;Y;Z)¤Č¤¤¤¦ŠĪ¤ņŅ¤ė¤Č”¢ Ļąév¤Ē¤Īøß“Ī¤ĪĻąév¤ĖĖʤʤ¤¤ė¤č¤¦¤ĖŅ¤Ø¤ė”£ ¤½¤³¤Ē”¢p(X),p(Y),p(Z)¤¬gaussian¤Ē½üĖʤĒ¤¤ėöŗĻ¤Ī MI(X;Y;Z)¤ĪÓB¤ņÕ{¤Ł¤Ę¤ß¤æ”£ øß“Ī¤ĪĻą»„ĒéóĮæ NTIC = MI(X; Y; Z) ¤č¤Ć¤Ę”¢ NTIC¤½¤ģ¤ø¤æ¤¤¤Ļ 3ÕߤĪég¤ĒŅ»¤ÄQ¤Ž¤ė¤Ē¤¢¤Ć¤Ę”¢ ¤Ź¤ó¤é¤«¤Ī·½Ļņ¤ĪÓ°ķ ¤ņŅāĪ¶¤·¤Ę¤¤¤ė¤ļ¤±¤Ē¤Ļ¤Ź¤¤”£
- 4. p(X),p(Y),p(Z)¤¬gaussian¤ĪöŗĻ ¤č¤Ć¤ĘNTIC = MI(X,Y,Z) ¤āĻąév¤ČĘ«Ļąév¤Ēų¤±¤ė”£ MI(X; Y; Z) = MI(X; Y) ? MI(X; Y|Z) Zhao J, Zhou Y, Zhang X, Chen L. (2016) Proc Natl Acad Sci U S A. 113(18):5130-5. ¤ĪSupplementary information¤ĖŌ^Ć÷¤¢¤ź: https://www.pnas.org/content/pnas/suppl/2016/04/16/1522586113.DCSupplemental/pnas.1522586113.sapp.pdf = ? 1 2 log(1 ? ¦Ń2 XY) + 1 2 log(1 ? ¦Ń2 XY?Z) = ? 1 2 log( 1 ? ¦Ń2 XY 1 ? ¦Ń2 XY?Z ) p(X),p(Y),p(Z)¤¬gaussian¤ĪöŗĻ”¢ ĻąévSŹż MI¤Ŗ¤č¤ÓĢõ¼žø¶¤MI¤Ļ”¢Ļąév¤Ŗ¤č¤ÓĘ«Ļąév¤Ēų¤±¤ė”£ MI(X; Y) = ? 1 2 log(1 ? ¦Ń2 XY) Ę«ĻąévSŹżMI(X; Y|Z) = ? 1 2 log(1 ? ¦Ń2 XY?Z) ¦ŃXY?Z ¦ŃXY
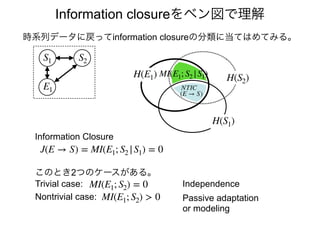
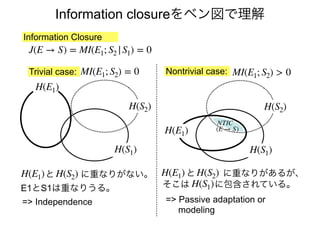
- 5. Information closure¤ņ„Ł„óķ¤ĒĄķ½ā S1 S2 E1 rĻµĮŠ„Ē©`„æ¤Ėų¤Ć¤Ęinformation closure¤Ī·Öī¤Ėµ±¤Ę¤Ļ¤į¤Ę¤ß¤ė”£ Information Closure J(E ”ś S) = MI(E1; S2 |S1) = 0 H(E1) H(S2) H(S1) MI(E1; S2 |S1) NTIC (E ”ś S) MI(E1; S2) = 0Trivial case: MI(E1; S2) > 0Nontrivial case: ¤³¤Ī¤Č¤2¤Ä¤Ī„±©`„¹¤¬¤¢¤ė”£ Independence Passive adaptation or modeling
- 6. Trivial case: Nontrivial case: Information closure¤ņ„Ł„óķ¤ĒĄķ½ā Information Closure J(E ”ś S) = MI(E1; S2 |S1) = 0 H(E1) H(S2) H(S1) MI(E1; S2) = 0 MI(E1; S2) > 0 => Independence => Passive adaptation or modeling H(E1) H(S2)¤Č ¤ĖÖŲ¤Ź¤ź¤¬¤Ź¤¤”£ H(E1) H(S2) H(S1) NTIC (E ”ś S) H(E1) H(S2)¤Č ¤ĖÖŲ¤Ź¤ź¤¬¤¢¤ė¤¬”¢ ¤½¤³¤Ļ ¤Ė°üŗ¬¤µ¤ģ¤Ę¤¤¤ė”£H(S1)E1¤ČS1¤ĻÖŲ¤Ź¤ź¤¦¤ė”£
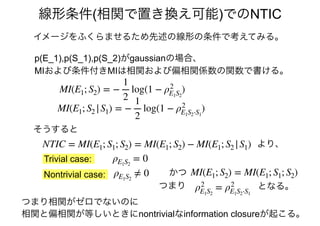
- 7. „¤„į©`„ø¤ņ¤Õ¤Æ¤é¤Ž¤»¤ė¤æ¤įĻČŹö¤Ī¾ŠĪ¤ĪĢõ¼ž¤Ēæ¼¤Ø¤Ę¤ß¤ė”£ ¾ŠĪĢõ¼ž(Ļąév¤ĒÖƤQ¤ØæÉÄÜ)¤Ē¤ĪNTIC p(E_1),p(S_1),p(S_2)¤¬gaussian¤ĪöŗĻ”¢ MI¤Ŗ¤č¤ÓĢõ¼žø¶¤MI¤ĻĻąév¤Ŗ¤č¤ÓĘ«ĻąévSŹż¤ĪévŹż¤Ēų¤±¤ė”£ ¤«¤Ä Trivial case: Nontrivial case: ¦ŃE1S2 ”Ł 0 ¤½¤¦¤¹¤ė¤Č ¦ŃE1S2 = 0 ¦Ń2 E1S2 = ¦Ń2 E1S2?S1 ¤Č¤Ź¤ė”£ NTIC = MI(E1; S1; S2) = MI(E1; S2) ? MI(E1; S2 |S1) ¤č¤ź”¢ MI(E1; S2) = MI(E1; S1; S2) ¤Ä¤Ž¤ź MI(E1; S2) = ? 1 2 log(1 ? ¦Ń2 E1S2 ) MI(E1; S2 |S1) = ? 1 2 log(1 ? ¦Ń2 E1S2?S1 ) ¤Ä¤Ž¤źĻąév¤¬„¼„ķ¤Ē¤Ź¤¤¤Ī¤Ė Ļąév¤ČĘ«Ļąév¤¬µČ¤·¤¤¤Č¤¤Ėnontrivial¤Źinformation closure¤¬Ęš¤³¤ė”£
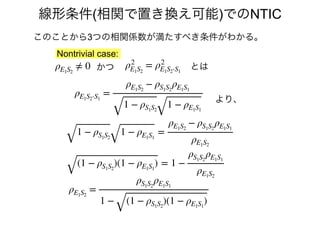
- 8. ¤³¤Ī¤³¤Č¤«¤é3¤Ä¤ĪĻąévSŹż¤¬ŗ¤æ¤¹¤Ł¤Ģõ¼ž¤¬¤ļ¤«¤ė”£ ¦Ń2 E1S2 = ¦Ń2 E1S2?S1 ¤«¤Ä¦ŃE1S2 ”Ł 0 ¤Č¤Ļ ¦ŃE1S2?S1 = ¦ŃE1S2 ? ¦ŃS1S2 ¦ŃE1S1 1 ? ¦ŃS1S2 1 ? ¦ŃE1S1 1 ? ¦ŃS1S2 1 ? ¦ŃE1S1 = ¦ŃE1S2 ? ¦ŃS1S2 ¦ŃE1S1 ¦ŃE1S2 (1 ? ¦ŃS1S2 )(1 ? ¦ŃE1S1 ) = 1 ? ¦ŃS1S2 ¦ŃE1S1 ¦ŃE1S2 ¤č¤ź”¢ ¦ŃE1S2 = ¦ŃS1S2 ¦ŃE1S1 1 ? (1 ? ¦ŃS1S2 )(1 ? ¦ŃE1S1 ) Nontrivial case: ¾ŠĪĢõ¼ž(Ļąév¤ĒÖƤQ¤ØæÉÄÜ)¤Ē¤ĪNTIC
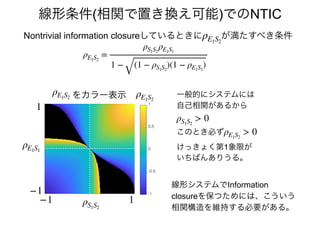
- 9. Nontrivial information closure¤·¤Ę¤¤¤ė¤Č¤¤Ė ¤¬ŗ¤æ¤¹¤Ł¤Ģõ¼ž¦ŃE1S2 ¦ŃE1S2 = ¦ŃS1S2 ¦ŃE1S1 1 ? (1 ? ¦ŃS1S2 )(1 ? ¦ŃE1S1 ) Ņ»°ćµÄ¤Ė„·„¹„Ę„ą¤Ė¤Ļ ×Ō¼ŗĻąév¤¬¤¢¤ė¤«¤é ¤³¤Ī¤Č¤±Ų¤ŗ ¦ŃS1S2 > 0 ¦ŃE1S2 > 0 ¦ŃE1S1 ¦ŃS1S2 ?1 1 ?1 1 ¦ŃE1S2 ¦ŃE1S2 ¤ņ„«„é©`±ķŹ¾ ¤±¤Ć¤¤ē¤ÆµŚ1ĻóĻŽ¤¬ ¤¤¤Į¤Š¤ó¤¢¤ź¤¦¤ė”£ ¾ŠĪ„·„¹„Ę„ą¤ĒInformation closure¤ņ±£¤Ä¤æ¤į¤Ė¤Ļ”¢¤³¤¦¤¤¤¦ ĻąévŌģ¤ņ¾S³Ö¤¹¤ė±ŲŅŖ¤¬¤¢¤ė”£ ¾ŠĪĢõ¼ž(Ļąév¤ĒÖƤQ¤ØæÉÄÜ)¤Ē¤ĪNTIC
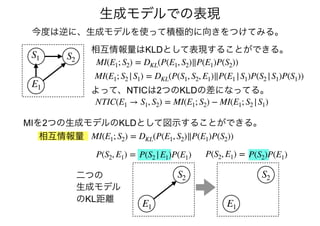
- 10. Éś³É„ā„Ē„ė¤Ē¤Ī±ķ¬F NTIC(E1 ”ś S1, S2) = MI(E1; S2) ? MI(E1; S2 |S1) S1 S2 E1 MI(E1; S2) = DKL(P(E1, S2)”ĪP(E1)P(S2)) MI(E1; S2 |S1) = DKL(P(S1, S2, E1)”ĪP(E1 |S1)P(S2 |S1)P(S1)) Ļą»„ĒéóĮæ¤ĻKLD¤Č¤·¤Ę±ķ¬F¤¹¤ė¤³¤Č¤¬¤Ē¤¤ė”£ ¤č¤Ć¤Ę”¢NTIC¤Ļ2¤Ä¤ĪKLD¤Ī²ī¤Ė¤Ź¤Ć¤Ę¤ė”£ MI¤ņ2¤Ä¤ĪÉś³É„ā„Ē„ė¤ĪKLD¤Č¤·¤ĘķŹ¾¤¹¤ė¤³¤Č¤¬¤Ē¤¤ė”£ P(S2 |E1)P(E1) MI(E1; S2) = DKL(P(E1, S2)”ĪP(E1)P(S2))Ļą»„ĒéóĮæ P(S2)P(E1) ¶ž¤Ä¤Ī Éś³É„ā„Ē„ė ¤ĪKL¾ąėx S2 S2 E1E1 P(S2, E1) = ½ń¶Č¤ĻÄę¤Ė”¢Éś³É„ā„Ē„ė¤ņŹ¹¤Ć¤Ę·eOµÄ¤ĖĻņ¤¤ņ¤Ä¤±¤Ę¤ß¤ė”£ P(S2, E1) =
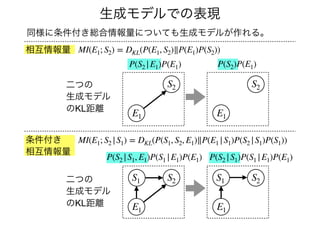
- 11. P(S2 |E1)P(E1) MI(E1; S2) = DKL(P(E1, S2)”ĪP(E1)P(S2)) Éś³É„ā„Ē„ė¤Ē¤Ī±ķ¬F Ļą»„ĒéóĮæ P(S2)P(E1) ¶ž¤Ä¤Ī Éś³É„ā„Ē„ė ¤ĪKL¾ąėx Ģõ¼žø¶¤ Ļą»„ĒéóĮæ MI(E1; S2 |S1) = DKL(P(S1, S2, E1)”ĪP(E1 |S1)P(S2 |S1)P(S1)) P(S2 |S1, E1)P(S1 |E1)P(E1) S1 S2 S1 S2 P(S2 |S1)P(S1 |E1)P(E1) ¶ž¤Ä¤Ī Éś³É„ā„Ē„ė ¤ĪKL¾ąėx E1E1 S2 S2 E1E1 Ķ¬¤ĖĢõ¼žø¶¤¾tŗĻĒéóĮæ¤Ė¤Ä¤¤¤Ę¤āÉś³É„ā„Ē„ė¤¬×÷¤ģ¤ė”£
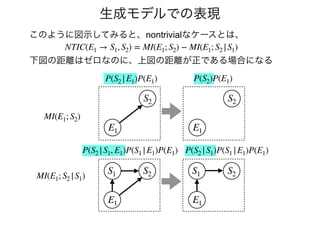
- 12. Éś³É„ā„Ē„ė¤Ē¤Ī±ķ¬F ¤³¤Ī¤č¤¦¤ĖķŹ¾¤·¤Ę¤ß¤ė¤Č”¢nontrivial¤Ź„±©`„¹¤Č¤Ļ”¢ P(S2 |E1)P(E1) P(S2)P(E1) S2 S2 E1E1 P(S2 |S1, E1)P(S1 |E1)P(E1) S1 S2 S1 S2 P(S2 |S1)P(S1 |E1)P(E1) E1E1 NTIC(E1 ”ś S1, S2) = MI(E1; S2) ? MI(E1; S2 |S1) ĻĀķ¤Ī¾ąėx¤Ļ„¼„ķ¤Ź¤Ī¤Ė”¢ÉĻķ¤Ī¾ąėx¤¬Õż¤Ē¤¢¤ėöŗĻ¤Ė¤Ź¤ė MI(E1; S2) MI(E1; S2 |S1)