
![Biological Systems
Engineering lab.
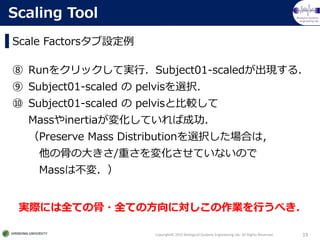
Scale Modelセクションについて(骨の大きさと重さの調整)
Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 10
Scaling Tool
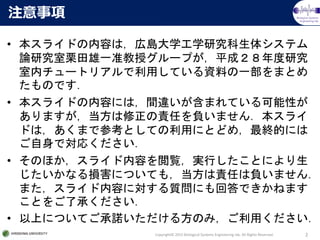
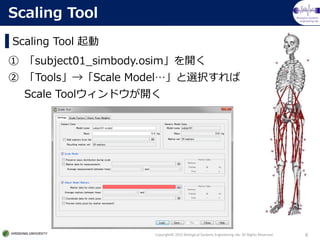
Preserve~ :Scaling前後で骨の重さの比を保持
Marker data~ :作成した.trcファイル(静止状態推奨)
Average~ :.trcのどの時間の平均データを使うか
? Scaling前
? Scaling後(Preserve~ ONの時) ? Scaling後(Preserve~ OFFの時)
例:組み込みのモデル を,体重100 [kg]の被験者にScaling
距骨重量 / 踵骨重量 0.08
体重 72.6 [kg]
距骨重量 / 踵骨重量 0.08
体重 100 [kg]
距骨重量 / 踵骨重量 0.0679
体重 125.22 [kg]](https://image.slidesharecdn.com/opensimscaling20160118-160502071046/85/OpenSim-scaling-10-320.jpg)
OpenSim の 使い方 (scaling編)
- 1. OpenSimの使い方 Scaling Tool 編 2016/5/2 Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 広島大学工学研究科 生体システム論研究室 栗田グループ
- 2. Biological Systems Engineering lab. ? 本スライドの内容は,広島大学工学研究科生体システム 論研究室栗田雄一准教授グループが,平成28年度研究 室内チュートリアルで利用している資料の一部をまとめ たものです. ? 本スライドの内容には,間違いが含まれている可能性が ありますが,当方は修正の責任を負いません.本スライ ドは,あくまで参考としての利用にとどめ,最終的には ご自身で対応ください. ? そのほか,スライド内容を閲覧,実行したことにより生 じたいかなる損害についても,当方は責任は負いません. また,スライド内容に対する質問にも回答できかねます ことをご了承ください. ? 以上についてご承諾いただける方のみ,ご利用ください. Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 2 注意事項
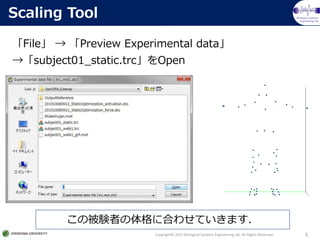
- 3. Biological Systems Engineering lab. Scaling Tool 概要 Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 3 Scaling Tool モーションキャプチャで.trcファイルを作ると その中にはマーカーの位置が保存される. これらのマーカー位置から, 「体格を考慮した.osimファイルを作る」 =「筋骨格モデルの体格を被験者に合わせる」のが Scaling Toolである. 一方.osimファイルにもマーカーの位置が保存されている.
- 4. Biological Systems Engineering lab. Scaling Tool 概要 Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 4 Scaling Tool これら3つの機能を備えている. 体格を考慮 A) 骨の大きさ?重さの調整 B) 姿勢の計算(Inverse Kinematics) C) .osimファイル側のマーカー位置の調整
- 5. Biological Systems Engineering lab. Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 5 Scaling Tool 「File」 → 「Preview Experimental data」 →「subject01_static.trc」をOpen この被験者の体格に合わせていきます.
- 6. Biological Systems Engineering lab. Scaling Tool 起動 Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 6 Scaling Tool ① 「subject01_simbody.osim」を開く ② 「Tools」→「Scale Model…」と選択すれば Scale Toolウィンドウが開く
- 7. Biological Systems Engineering lab. Subject Dataセクションについて(被験者のデータ) Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 7 Scaling Tool Model name :作成する.osimファイルの名前 Mass :作成する.osimファイルの体重 =(既知ならば)被験者の体重 Add markers from file :.osimファイルに マーカーを追加するかどうか.
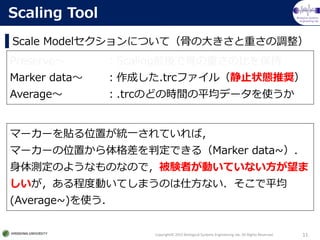
- 8. Biological Systems Engineering lab. Scale Modelセクションについて(骨の大きさと重さの調整) Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 8 Scaling Tool Preserve~ :Scaling前後で骨の重さの比を保持 Marker data~ :作成した.trcファイル(静止状態推奨) Average~ :.trcのどの時間の平均データを使うか
- 9. Biological Systems Engineering lab. Scale Modelセクションについて(骨の大きさと重さの調整) Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 9 Scaling Tool Preserve~ :Scaling前後で骨の重さの比を保持 Marker data~ :作成した.trcファイル(静止状態推奨) Average~ :.trcのどの時間の平均データを使うか Preserve~ ON 組み込みのモデルの骨の重量比を維持し, 総和が被験者の体重と等しくなるように調整する. Preserve~ OFF 骨の大きさの拡大倍率から予想される質量にする. 総和は被験者の体重と等しくならないことが多い. 被験者の体重が分かるときは, ONの方が無難か.
- 10. Biological Systems Engineering lab. Scale Modelセクションについて(骨の大きさと重さの調整) Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 10 Scaling Tool Preserve~ :Scaling前後で骨の重さの比を保持 Marker data~ :作成した.trcファイル(静止状態推奨) Average~ :.trcのどの時間の平均データを使うか ? Scaling前 ? Scaling後(Preserve~ ONの時) ? Scaling後(Preserve~ OFFの時) 例:組み込みのモデル を,体重100 [kg]の被験者にScaling 距骨重量 / 踵骨重量 0.08 体重 72.6 [kg] 距骨重量 / 踵骨重量 0.08 体重 100 [kg] 距骨重量 / 踵骨重量 0.0679 体重 125.22 [kg]
- 11. Biological Systems Engineering lab. Scale Modelセクションについて(骨の大きさと重さの調整) Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 11 Scaling Tool Preserve~ :Scaling前後で骨の重さの比を保持 Marker data~ :作成した.trcファイル(静止状態推奨) Average~ :.trcのどの時間の平均データを使うか マーカーを貼る位置が統一されていれば, マーカーの位置から体格差を判定できる(Marker data~). 身体測定のようなものなので,被験者が動いていない方が望ま しいが,ある程度動いてしまうのは仕方ない.そこで平均 (Average~)を使う.
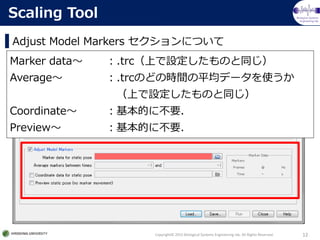
- 12. Biological Systems Engineering lab. Adjust Model Markers セクションについて Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 12 Scaling Tool Marker data~ :.trc(上で設定したものと同じ) Average~ :.trcのどの時間の平均データを使うか (上で設定したものと同じ) Coordinate~ :基本的に不要. Preview~ :基本的に不要.
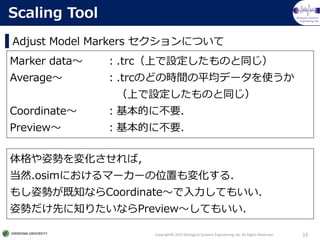
- 13. Biological Systems Engineering lab. Adjust Model Markers セクションについて Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 13 Scaling Tool Marker data~ :.trc(上で設定したものと同じ) Average~ :.trcのどの時間の平均データを使うか (上で設定したものと同じ) Coordinate~ :基本的に不要. Preview~ :基本的に不要. 体格や姿勢を変化させれば, 当然.osimにおけるマーカーの位置も変化する. もし姿勢が既知ならCoordinate~で入力してもいい. 姿勢だけ先に知りたいならPreview~してもいい.
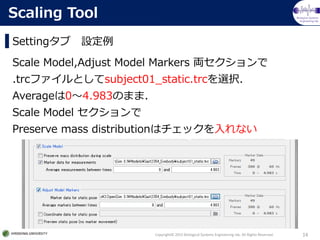
- 14. Biological Systems Engineering lab. Settingタブ 設定例 Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 14 Scaling Tool Scale Model,Adjust Model Markers 両セクションで .trcファイルとしてsubject01_static.trcを選択. Averageは0~4.983のまま. Scale Model セクションで Preserve mass distributionはチェックを入れない
- 15. Biological Systems Engineering lab. Scale Factorsタブについて(どの骨をどれだけ拡大するか) Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 15 Scaling Tool Use measurement:測定値から拡大倍率を決定する Use manual scales:拡大倍率を手入力する Uniform :XYZ全方向に同一倍率で拡大する
- 16. Biological Systems Engineering lab. Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 16 Scaling Tool マーカー対を指定すれば,「Use measurement」から その距離に合わせて骨の拡大/縮小が行える. Uniformにチェックを付けなければ, 「X方向にのみ拡大する」といったことも可能. Scale Factorsタブについて(どの骨をどれだけ拡大するか) Use measurement:測定値から拡大倍率を決定する Use manual scales:拡大倍率を手入力する Uniform :XYZ全方向に同一倍率で拡大する
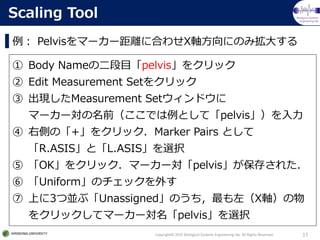
- 17. Biological Systems Engineering lab. 例: Pelvisをマーカー距離に合わせX軸方向にのみ拡大する Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 17 Scaling Tool ① Body Nameの二段目「pelvis」をクリック ② Edit Measurement Setをクリック ③ 出現したMeasurement Setウィンドウに マーカー対の名前(ここでは例として「pelvis」)を入力 ④ 右側の「+」をクリック.Marker Pairs として 「R.ASIS」と「L.ASIS」を選択 ⑤ 「OK」をクリック.マーカー対「pelvis」が保存された. ⑥ 「Uniform」のチェックを外す ⑦ 上に3つ並ぶ「Unassigned」のうち,最も左(X軸)の物 をクリックしてマーカー対名「pelvis」を選択
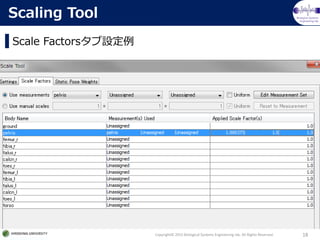
- 18. Biological Systems Engineering lab. Scale Factorsタブ設定例 Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 18 Scaling Tool
- 19. Biological Systems Engineering lab. Scale Factorsタブ設定例 Copyright? 2015 Biological Systems Engineering lab. All Rights Reserved. 19 Scaling Tool ⑧ Runをクリックして実行.Subject01-scaledが出現する. ⑨ Subject01-scaled の pelvisを選択. ⑩ Subject01-scaled の pelvisと比較して Massやinertiaが変化していれば成功. (Preserve Mass Distributionを選択した場合は, 他の骨の大きさ/重さを変化させていないので Massは不変.) 実際には全ての骨?全ての方向に対しこの作業を行うべき.
Editor's Notes
- #10: talus_r と calcn_r の質量比 = 0.08 体重:72.6 [kg]