
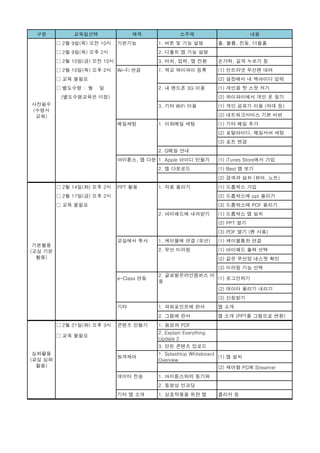
Schedule
- 1. кө¬л¶„ көҗмңЎмқјм„ нғқ м ңлӘ© мҶҢмЈјм ң лӮҙмҡ© в–Ў 2мӣ” 9мқј(лӘ©) мҳӨм „ 10мӢң кё°ліёкё°лҠҘ 1. лІ„нҠј л°Ҹ кё°лҠҘ м„ӨлӘ… нҷҲ, ліјлҘЁ, 진лҸҷ, лҚ”лё”нҷҲ в–Ў 2мӣ” 9мқј(лӘ©) мҳӨнӣ„ 2мӢң 2. л””нҸҙнҠё м•ұ кё°лҠҘ м„ӨлӘ… в–Ў 2мӣ” 10мқј(кёҲ) мҳӨм „ 10мӢң 3. н„°м№ҳ, мһ…л Ҙ, м•ұ м „нҷҳ мҶҗк°ҖлқҪ, кёёкІҢ лҲ„лҘҙкё° л“ұ в–Ў 2мӣ” 10мқј(лӘ©) мҳӨнӣ„ 2мӢң Wi-Fi м—°кІ° 1. н•ҷкөҗ мҷҖмқҙнҢҢмқҙ л“ұлЎқ (1) мқёнҠёлқјл„· л¬ҙм„ лһң лҢҖм—¬ в–Ў көҗмңЎ л¶Ҳн•„мҡ” (2) м„Өм •м—җм„ң лӮҙ л§Ҙм•„мқҙл”” мһ…л Ҙ в–Ў лі„лҸ„мҲҳл № : мӣ” мқј 2. лӮҙ н•ёл“ңнҸ° 3G мқҙмҡ© (1) к°ңмқёмҡ© н•« мҠӨнҢҹ мјңкё° (лі„лҸ„мҲҳл №көҗмңЎмқҖ лҜём •) (2) мҷҖмқҙнҢҢмқҙм—җм„ң к°ңмқё нҸ° м°ҫкё° мӮ¬м „н•„мҲҳ 3. кё°нғҖ WiFi мқҙмҡ© (1) к°ңмқё кіөмң кё° мқҙмҡ© (мқҳлҢҖ л“ұ) (мҲҳл №мӢң көҗмңЎ) (2) л„ӨнҠёмӣҢнҒ¬м„ң비мҠӨ кё°ліё 비лІҲ л©”мқјм„ёнҢ… 1. мқҙнҷ”л©”мқј м„ёнҢ… (1) кё°нғҖ л©”мқј 추к°Җ (2) нҸ¬нғҲм•„мқҙл””, л©”мқјм„ңлІ„ м„ёнҢ… (3) нҸ¬нҠё ліҖкІҪ 2. Gл©”мқј м•ҲлӮҙ м•„мқҙнҠ мҠӨ, м•ұ лӢӨмҡҙ 1. Apple м•„мқҙл”” л§Ңл“Өкё° (1) iTunes Storeм—җм„ң к°Җмһ… 2. м•ұ лӢӨмҡҙлЎңл“ң (1) Best м•ұ ліҙкё° (2) кІҖмғүкіј м„Өм№ҳ (л·°м–ҙ, л…ёнҠё) в–Ў 2мӣ” 14мқј(нҷ”) мҳӨнӣ„ 2мӢң PPT нҷңмҡ© 1. мһҗлЈҢ мҳ¬лҰ¬кё° (1) л“ңлЎӯл°•мҠӨ к°Җмһ… в–Ў 2мӣ” 17мқј(кёҲ) мҳӨнӣ„ 2мӢң (2) л“ңлЎӯл°•мҠӨм—җ ppt мҳ¬лҰ¬кё° в–Ў көҗмңЎ л¶Ҳн•„мҡ” (3) л“ңлЎӯл°•мҠӨм—җ PDF мҳ¬лҰ¬кё° 2. м•„мқҙнҢЁл“ңм—җ лӮҙл Өл°ӣкё° (1) л“ңлЎӯл°•мҠӨ м•ұ м„Өм№ҳ (2) PPT м—ҙкё° (3) PDF м—ҙкё° (нҺң мӮ¬мҡ©) көҗмӢӨм—җм„ң нҲ¬мӮ¬ 1. мјҖмқҙлё”м—җ м—°кІ° (мң м„ ) (1) мјҖмқҙлё”нҶөн•ң м—°кІ° кё°ліёнҷңмҡ© (көҗмӢӨ кё°ліё 2. л¬ҙм„ лҜёлҹ¬л§Ғ (1) м•„мқҙнҢЁл“ң м¶ңл Ҙ м„ нғқ нҷңмҡ©) (2) к°ҷмқҖ л¬ҙм„ л§қ л„ӨмҠӨнҢҹ нҷ•мқё (3) лҜёлҹ¬л§Ғ кё°лҠҘ м„ нғқ 2. кёҖлЎңлІҢмҳЁлқјмқёмә нҚјмҠӨ мқҙ e-Class м—°лҸҷ (1) лЎңк·ёмқён•ҳкё° мҡ© (2) лҚ°мқҙн„° мҳ¬лҰ¬кё° лӮҙлҰ¬кё° (3) мӢ мІӯл°ӣкё° кё°нғҖ 1. нҢҢмӣҢнҸ¬мқёнҠём—җ нҢҗм„ң м•ұ мҶҢк°ң 2. к·ёлҰјм—җ нҢҗм„ң м•ұ мҶҢк°ң (PPTлҘј к·ёлҰјмңјлЎң ліҖнҷҳ) в–Ў 2мӣ” 21мқј(нҷ”) мҳӨнӣ„ 3мӢң мҪҳн…җмё л§Ңл“Өкё° 1. мқҢм„ұкіј PDF 2. Explain Everything в–Ў көҗмңЎ л¶Ҳн•„мҡ” Update 2 3. л§Ңл“ мҪҳн…җмё м—…лЎңл“ң мӢ¬нҷ”нҷңмҡ© 1. Splashtop Whiteboard мӣҗкІ©м ңм–ҙ (1) м•ұ м„Өм№ҳ (көҗмӢӨ мӢ¬нҷ” Overview нҷңмҡ©) (2) м ңм–ҙн• PCм—җ Streamer лҚ°мқҙн„° м „мҶЎ 1. м•„мқҙнҠ мҠӨмҷҖмқҳ лҸҷкё°нҷ” 2. лҸҷмҳҒмғҒ мқёмҪ”л”© кё°нғҖ м•ұ мҶҢк°ң 1. мғҒнҳёмһ‘мҡ©мқ„ мң„н•ң м•ұ нҒҙлҰ¬м»Ө л“ұ