–Ш—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–µ —А–∞–Ј–ї–Є—З–љ—Л—Е –≤–∞—А–Є–∞–љ—В–Њ–≤ –њ–µ—А–µ–ї–µ—В–∞ –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ –∞–њ–њ–∞—А–∞—В–∞ –≤ —В–Њ—З–Ї—Г –ї–Є–±—А–∞—Ж–Є–Є L2 —Б–Є—Б—В–µ–Љ—Л –Ч–µ–Љ–ї—П-–Ы—Г–љ–∞
0 likes574 views

–Я—А–µ–Ј–µ–љ—В–∞—Ж–Є—П –Ї–≤–∞–ї–Є—Д–Є–Ї–∞—Ж–Є–Њ–љ–љ–Њ–є —А–∞–±–Њ—В—Л –±–∞–Ї–∞–ї–∞–≤—А–∞ –Ъ–Є—Б–µ–ї—С–≤–∞ –Р. –Ъ. –Э–∞—Г—З–љ—Л–є —А—Г–Ї–Њ–≤–Њ–і–Є—В–µ–ї—М: –Р–≤—А–∞–Љ–µ–љ–Ї–Њ –Р. –Р.












![–°–њ–Є—Б–Њ–Ї –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–љ—Л—Е –Є—Б—В–Њ—З–љ–Є–Ї–Њ–≤
1. –Ь–∞—А–Ї–µ–µ–≤, –Р.–Я. –Ґ–Њ—З–Ї–Є –ї–Є–±—А–∞—Ж–Є–Є –≤ –љ–µ–±–µ—Б–љ–Њ–є –Љ–µ—Е–∞–љ–Є–Ї–µ –Є
–Ї–Њ—Б–Љ–Њ–і–Є–љ–∞–Љ–Є–Ї–µ [–Ґ–µ–Ї—Б—В]/–Р.–Я. –Ь–∞—А–Ї–µ–µ–≤. вАУ –Ь.:–Э–∞—Г–Ї–∞, 1978. вАУ 312 —Б—В—А.
2. –Ы–µ–≤–∞–љ—В–Њ–≤—Б–Ї–Є–є, –Т.–Ш. –Ь–µ—Е–∞–љ–Є–Ї–∞ –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ –њ–Њ–ї–µ—В–∞ –≤ —Н–ї–µ–Љ–µ–љ—В–∞—А–љ–Њ–Љ
–Є–Ј–ї–Њ–ґ–µ–љ–Є–Є [–Ґ–µ–Ї—Б—В]/–Т.–Ш. –Ы–µ–≤–∞–љ—В–Њ–≤—Б–Ї–Є–є. вАУ –Ь.: –Э–∞—Г–Ї–∞, 1980. вАУ 512 —Б—В—А.
3. –Ф—Г–±–Њ—И–Є–љ, –У.–Э. –Э–µ–±–µ—Б–љ–∞—П –Љ–µ—Е–∞–љ–Є–Ї–∞. –Р–љ–∞–ї–Є—В–Є—З–µ—Б–Ї–Є–µ –Є –Ї–∞—З–µ—Б—В–≤–µ–љ–љ—Л–µ
–Љ–µ—В–Њ–і—Л [–Ґ–µ–Ї—Б—В]/–У.–Э. –Ф—Г–±–Њ—И–Є–љ. вАУ –Ь.: –Э–∞—Г–Ї–∞, 1978. вАУ 456 —Б—В—А.
–Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 18 / 19](https://image.slidesharecdn.com/random-130619101832-phpapp01/85/L2-18-320.jpg)






























More Related Content
What's hot (20)
Viewers also liked (20)


















Similar to –Ш—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–µ —А–∞–Ј–ї–Є—З–љ—Л—Е –≤–∞—А–Є–∞–љ—В–Њ–≤ –њ–µ—А–µ–ї–µ—В–∞ –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ –∞–њ–њ–∞—А–∞—В–∞ –≤ —В–Њ—З–Ї—Г –ї–Є–±—А–∞—Ж–Є–Є L2 —Б–Є—Б—В–µ–Љ—Л –Ч–µ–Љ–ї—П-–Ы—Г–љ–∞ (16)
















More from Theoretical mechanics department (20)




















–Ш—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–µ —А–∞–Ј–ї–Є—З–љ—Л—Е –≤–∞—А–Є–∞–љ—В–Њ–≤ –њ–µ—А–µ–ї–µ—В–∞ –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ –∞–њ–њ–∞—А–∞—В–∞ –≤ —В–Њ—З–Ї—Г –ї–Є–±—А–∞—Ж–Є–Є L2 —Б–Є—Б—В–µ–Љ—Л –Ч–µ–Љ–ї—П-–Ы—Г–љ–∞
- 1. –Ш—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–µ —А–∞–Ј–ї–Є—З–љ—Л—Е –≤–∞—А–Є–∞–љ—В–Њ–≤ –њ–µ—А–µ–ї–µ—В–∞ –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ –∞–њ–њ–∞—А–∞—В–∞ –≤ —В–Њ—З–Ї—Г –ї–Є–±—А–∞—Ж–Є–Є L2 —Б–Є—Б—В–µ–Љ—Л –Ч–µ–Љ–ї—П-–Ы—Г–љ–∞ –Ъ–∞—Д–µ–і—А–∞ —В–µ–Њ—А–µ—В–Є—З–µ—Б–Ї–Њ–є –Љ–µ—Е–∞–љ–Є–Ї–Є –Т—Л–њ–Њ–ї–љ–Є–ї: –Ъ–Є—Б–µ–ї¬®–µ–≤ –Р.–Ъ. e-mail: Kiselev.alexandr.2012@yandex.ru –Э–∞—Г—З–љ—Л–є —А—Г–Ї–Њ–≤–Њ–і–Є—В–µ–ї—М: –Ї.—В.–љ., –њ—А–Њ—Д–µ—Б—Б–Њ—А –Р–≤—А–∞–Љ–µ–љ–Ї–Њ –Р.–Р. e-mail: avramenko_a_a@mail.ru –°–∞–Љ–∞—А—Б–Ї–Є–є –≥–Њ—Б—Г–і–∞—А—Б—В–≤–µ–љ–љ—Л–є –∞—Н—А–Њ–Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Є–є —Г–љ–Є–≤–µ—А—Б–Є—В–µ—В –Є–Љ. –∞–Ї–∞–і–µ–Љ–Є–Ї–∞ –°. –Я. –Ъ–Њ—А–Њ–ї¬®–µ–≤–∞ (–љ–∞—Ж–Є–Њ–љ–∞–ї—М–љ—Л–є –Є—Б—Б–ї–µ–і–Њ–≤–∞—В–µ–ї—М—Б–Ї–Є–є —Г–љ–Є–≤–µ—А—Б–Є—В–µ—В) 19 –Є—О–љ—П 2013 –≥.
- 2. –¶–µ–ї—М –Є –Ј–∞–і–∞—З–Є —А–∞–±–Њ—В—Л –¶–µ–ї—М –Ь–Њ–і–µ–ї–Є—А–Њ–≤–∞–љ–Є–µ –і–≤–Є–ґ–µ–љ–Є—П –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ –∞–њ–њ–∞—А–∞—В–∞ –њ—А–Є —А–∞–Ј–ї–Є—З–љ—Л—Е –љ–∞—З–∞–ї—М–љ—Л—Е —Г—Б–ї–Њ–≤–Є—П—Е —Б—В–∞—А—В–∞ —Б –Њ–Ї–Њ–ї–Њ–Ј–µ–Љ–љ–Њ–є –Њ—А–±–Є—В—Л –Є –≤—Л–±–Њ—А –≤–∞—А–Є–∞–љ—В–∞ —Б –Љ–Є–љ–Є–Љ–∞–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В—М—О –њ–Њ–њ–∞–і–∞–љ–Є—П –≤ —В–Њ—З–Ї—Г L2. –Ч–∞–і–∞—З–Є 1 –°–Њ—Б—В–∞–≤–Є—В—М —Г—А–∞–≤–љ–µ–љ–Є—П –і–≤–Є–ґ–µ–љ–Є—П –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ –∞–њ–њ–∞—А–∞—В–∞ –і–ї—П –Њ–≥—А–∞–љ–Є—З–µ–љ–љ–Њ–є –Ј–∞–і–∞—З–Є —В—А–µ—Е —В–µ–ї; 2 –†–∞—Б—Б–Љ–Њ—В—А–µ—В—М —А–∞–Ј–ї–Є—З–љ—Л–µ –љ–∞—З–∞–ї—М–љ—Л–µ —Г—Б–ї–Њ–≤–Є—П —Б—В–∞—А—В–∞ —Б –Њ–Ї–Њ–ї–Њ–Ј–µ–Љ–љ–Њ–є –Њ—А–±–Є—В—Л –Є –≤—Л–±—А–∞—В—М –≤–∞—А–Є–∞–љ—В —Б –Љ–Є–љ–Є–Љ–∞–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В—М—О –њ–Њ–њ–∞–і–∞–љ–Є—П –≤ —В–Њ—З–Ї—Г L2. –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 2 / 19
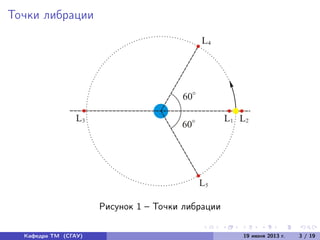
- 3. –Ґ–Њ—З–Ї–Є –ї–Є–±—А–∞—Ж–Є–Є –†–Є—Б—Г–љ–Њ–Ї 1 вАУ –Ґ–Њ—З–Ї–Є –ї–Є–±—А–∞—Ж–Є–Є –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 3 / 19
- 4. –Я—А–∞–Ї—В–Є—З–µ—Б–Ї–Њ–µ –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ —В–Њ—З–µ–Ї –ї–Є–±—А–∞—Ж–Є–Є –Т –љ–∞—Б—В–Њ—П—Й–µ–µ –≤—А–µ–Љ—П –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Є—Е –∞–њ–њ–∞—А–∞—В–Њ–≤ —А–∞–Ј–Љ–µ—Й–µ–љ—Л –≤ —А–∞–Ј–ї–Є—З–љ—Л—Е —В–Њ—З–Ї–∞—Е –ї–Є–±—А–∞—Ж–Є–Є –°–Њ–ї–љ–µ—З–љ–Њ–є —Б–Є—Б—В–µ–Љ—Л: SOHO (–∞–љ–≥–ї. Solar and Heliospheric Observatory, вАЭ–°–Њ–ї–љ–µ—З–љ–∞—П –Є –≥–µ–ї–Є–Њ—Б—Д–µ—А–љ–∞—П –Њ–±—Б–µ—А–≤–∞—В–Њ—А–Є—ПвАЭ) –љ–∞—Е–Њ–і–Є—В—Б—П –љ–∞ –Њ—А–±–Є—В–µ –≤ —В–Њ—З–Ї–µ L1 –Љ–µ–ґ–і—Г –Ч–µ–Љ–ї–µ–є –Є –°–Њ–ї–љ—Ж–µ–Љ. WMAP (–∞–љ–≥–ї. Wilkinson Microwave Anisotropy Probe), –Є–Ј—Г—З–∞–µ—В —А–µ–ї–Є–Ї—В–Њ–≤–Њ–µ –Є–Ј–ї—Г—З–µ–љ–Є–µ вАУ –≤ —В–Њ—З–Ї–µ L2 –Ј–∞ –Њ—А–±–Є—В–Њ–є –Ч–µ–Љ–ї–Є. Advanced Composition Explorer вАУ –≤ —В–Њ—З–Ї–µ L1 —Б–Є—Б—В–µ–Љ—Л –Ч–µ–Љ–ї—П-–°–Њ–ї–љ—Ж–µ. –Ґ–µ–ї–µ—Б–Ї–Њ–њ вАЭ–У–µ—А—И–µ–ї—МвАЭ –Є —В–µ–ї–µ—Б–Ї–Њ–њ вАЭ–Я–ї–∞–љ–ЇвАЭ, –Ј–∞–њ—Г—Й–µ–љ–љ—Л–µ 14 –Љ–∞—П 2009 –≥–Њ–і–∞, –љ–∞—Е–Њ–і—П—В—Б—П –≤ —В–Њ—З–Ї–µ L2 —Б–Є—Б—В–µ–Љ—Л –Ч–µ–Љ–ї—П-–°–Њ–ї–љ—Ж–µ. –Ъ–Њ—Б–Љ–Є—З–µ—Б–Ї–Є–є –∞–њ–њ–∞—А–∞—В WIND, –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ–љ—Л–є –і–ї—П –Є—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є—П —Б–Њ–ї–љ–µ—З–љ–Њ–≥–Њ –≤–µ—В—А–∞. –Р–њ–њ–∞—А–∞—В –Ј–∞–њ—Г—Й–µ–љ –≤ 1994 –≥–Њ–і—Г –Є —Д—Г–љ–Ї—Ж–Є–Њ–љ–Є—А—Г–µ—В –≤ –љ–∞—Б—В–Њ—П—Й–µ–µ –≤—А–µ–Љ—П, –љ–∞—Е–Њ–і–Є—В—Б—П –≤ —В–Њ—З–Ї–µ L1. –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 4 / 19
- 5. –Я–Њ—Б—В–∞–љ–Њ–≤–Ї–∞ –Ј–∞–і–∞—З–Є –†–Є—Б—Г–љ–Њ–Ї 2 вАУ –°–Є—Б—В–µ–Љ–∞ –Ї–Њ–Њ—А–і–Є–љ–∞—В –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 5 / 19
- 6. –Я–Њ—Б—В–∞–љ–Њ–≤–Ї–∞ –Ј–∞–і–∞—З–Є –Я—Г—Б—В—М m1, m2, m3 вАУ –Љ–∞—Б—Б—Л –Ч–µ–Љ–ї–Є, –Ы—Г–љ—Л –Є –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ –∞–њ–њ–∞—А–∞—В–∞ (–Ъ–Р) —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–µ–љ–љ–Њ. –Ф–Њ–њ—Г—Й–µ–љ–Є—П 1 –Ю—А–±–Є—В–∞ –Ы—Г–љ—Л —П–≤–ї—П–µ—В—Б—П –Ї—А—Г–≥–Њ–≤–Њ–є, —В.–µ. e = 1 вИТ b2 a2 = 0, –≥–і–µ e вАУ —Н–Ї—Б—Ж–µ–љ—В—А–Є—Б–Є—В–µ—В –Њ—А–±–Є—В—Л –Ы—Г–љ—Л; a –Є b вАУ –±–Њ–ї—М—И–∞—П –Є –Љ–∞–ї–∞—П –њ–Њ–ї—Г–Њ—Б–Є —Н–ї–ї–Є–њ—В–Є—З–µ—Б–Ї–Њ–є –Њ—А–±–Є—В—Л. 2 –Ф–≤–Є–ґ–µ–љ–Є–µ –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ –∞–њ–њ–∞—А–∞—В–∞ –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –≤ –њ–ї–Њ—Б–Ї–Њ—Б—В–Є –Њ—А–±–Є—В—Л –Ы—Г–љ—Л. –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 6 / 19
- 7. –Ъ–Є–љ–µ—В–Є—З–µ—Б–Ї–∞—П —Н–љ–µ—А–≥–Є—П –Є —Б–Є–ї–Њ–≤–∞—П —Д—Г–љ–Ї—Ж–Є—П –Ъ–Є–љ–µ—В–Є—З–µ—Б–Ї–∞—П —Н–љ–µ—А–≥–Є—П –Є —Б–Є–ї–Њ–≤–∞—П —Д—Г–љ–Ї—Ж–Є—П –Ъ–Р –Є–Љ–µ—О—В –≤–Є–і: T = 1 2 m3 ( ЋЩx вИТ ЋЩќљy)2 + ( ЋЩy + ЋЩќљx)2 + ЋЩz2 , (1) U = fm3 m1 r1 + m2 r2 . (2) –≥–і–µ ќљ вАУ –Є—Б—В–Є–љ–љ–∞—П –∞–љ–Њ–Љ–∞–ї–Є—П, f вАУ –≥—А–∞–≤–Є—В–∞—Ж–Є–Њ–љ–љ–∞—П –њ–Њ—Б—В–Њ—П–љ–љ–∞—П. –Ч–∞–Ї–Њ–љ –і–≤–Є–ґ–µ–љ–Є—П –Ы—Г–љ—Л –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –Ч–µ–Љ–ї–Є –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П –Є–Ј –Ј–∞–і–∞—З–Є –і–≤—Г—Е —В–µ–ї: r = p 1 + e cos ќљ , c2 = f(m1 + m2)p, dќљ dt = c r2 . (3) –≥–і–µ p –Є e вАУ —Д–Њ–Ї–∞–ї—М–љ—Л–є –њ–∞—А–∞–Љ–µ—В—А –Є —Н–Ї—Б—Ж–µ–љ—В—А–Є—Б–Є—В–µ—В –Ї–µ–њ–ї–µ—А–Њ–≤—Б–Ї–Њ–є –Њ—А–±–Є—В—Л, c вАУ –Ї–Њ–љ—Б—В–∞–љ—В–∞ –Є–љ—В–µ–≥—А–∞–ї–∞ –њ–ї–Њ—Й–∞–і–µ–є. –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 7 / 19
- 8. –£—А–∞–≤–љ–µ–љ–Є—П –і–≤–Є–ґ–µ–љ–Є—П –Њ–≥—А–∞–љ–Є—З–µ–љ–љ–Њ–є –Ј–∞–і–∞—З–Є —В—А–µ—Е —В–µ–ї –Я—А–Є –њ–Њ–Љ–Њ—Й–Є —Д—Г–љ–Ї—Ж–Є–Є –Ы–∞–≥—А–∞–љ–ґ–∞ L = T + U –≤—Л–њ–Є—Б—Л–≤–∞–µ–Љ –і–Є—Д—Д–µ—А–µ–љ—Ж–Є–∞–ї—М–љ—Л–µ —Г—А–∞–≤–љ–µ–љ–Є—П –і–≤–Є–ґ–µ–љ–Є—П –Ъ–Р: ¬®x вИТ 2 ЋЩќљ ЋЩy вИТ ¬®ќљy вИТ ЋЩќљ2 x = вИВW вИВx , ¬®y + 2 ЋЩќљ ЋЩx + ¬®ќљx вИТ ЋЩќљ2 y = вИВW вИВy , (4) ¬®z = вИВW вИВz . –Ч–і–µ—Б—М —З–µ—А–µ–Ј W –Њ–±–Њ–Ј–љ–∞—З–µ–љ–∞ —Б–Є–ї–Њ–≤–∞—П —Д—Г–љ–Ї—Ж–Є—П U —А–∞–Ј–і–µ–ї–µ–љ–љ–∞—П –љ–∞ m3. –°–і–µ–ї–∞–µ–Љ –≤ —Г—А–∞–≤–љ–µ–љ–Є—П—Е (4) —Б–ї–µ–і—Г—О—Й—Г—О –Ј–∞–Љ–µ–љ—Г –њ–µ—А–µ–Љ–µ–љ–љ—Л—Е: x = rќЊ, y = rќЈ, z = rќґ. (5) –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 8 / 19
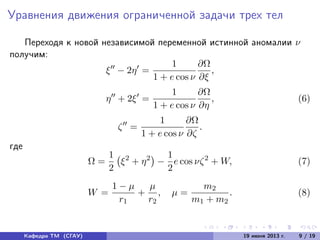
- 9. –£—А–∞–≤–љ–µ–љ–Є—П –і–≤–Є–ґ–µ–љ–Є—П –Њ–≥—А–∞–љ–Є—З–µ–љ–љ–Њ–є –Ј–∞–і–∞—З–Є —В—А–µ—Е —В–µ–ї –Я–µ—А–µ—Е–Њ–і—П –Ї –љ–Њ–≤–Њ–є –љ–µ–Ј–∞–≤–Є—Б–Є–Љ–Њ–є –њ–µ—А–µ–Љ–µ–љ–љ–Њ–є –Є—Б—В–Є–љ–љ–Њ–є –∞–љ–Њ–Љ–∞–ї–Є–Є ќљ –њ–Њ–ї—Г—З–Є–Љ: ќЊ вИТ 2ќЈ = 1 1 + e cos ќљ вИВвД¶ вИВќЊ , ќЈ + 2ќЊ = 1 1 + e cos ќљ вИВвД¶ вИВќЈ , (6) ќґ = 1 1 + e cos ќљ вИВвД¶ вИВќґ . –≥–і–µ вД¶ = 1 2 ќЊ2 + ќЈ2 вИТ 1 2 e cos ќљќґ2 + W, (7) W = 1 вИТ ¬µ r1 + ¬µ r2 , ¬µ = m2 m1 + m2 . (8) –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 9 / 19
- 10. –Э–∞—З–∞–ї—М–љ—Л–µ —Г—Б–ї–Њ–≤–Є—П –Ъ–Њ–Њ—А–і–Є–љ–∞—В—Л –Ф–ї—П –љ–∞—Е–Њ–ґ–і–µ–љ–Є—П —А–µ—И–µ–љ–Є—П –њ–ї–Њ—Б–Ї–Њ–є –Ї—А—Г–≥–Њ–≤–Њ–є –Њ–≥—А–∞–љ–Є—З–µ–љ–љ–Њ–є –Ј–∞–і–∞—З–Є —В—А–µ—Е —В–µ–ї —З–Є—Б–ї–µ–љ–љ–Њ –њ—А–Њ–Є–љ—В–µ–≥—А–Є—А—Г–µ–Љ —Б–Є—Б—В–µ–Љ—Г (6). –Э–∞—З–∞–ї—М–љ—Л–µ –Ї–Њ–Њ—А–і–Є–љ–∞—В—Л: x0 = x1 + (R1 + h) cos(ѕЖ), y0 = вИТ(R1 + h) sin(ѕЖ), (10) –≥–і–µ x1 вАУ –∞–±—Б—Ж–Є—Б—Б–∞ —Ж–µ–љ—В—А–∞ –Ч–µ–Љ–ї–Є, h = 300 –Ї–Љ вАУ –≤—Л—Б–Њ—В–∞ –Ї—А—Г–≥–Њ–≤–Њ–є –Њ—А–±–Є—В—Л –Ъ–Р, ѕЖ вАУ —Г–≥–Њ–ї –Љ–µ–ґ–і—Г –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П–Љ–Є –Є–Ј —Ж–µ–љ—В—А–∞ –Ч–µ–Љ–ї–Є –љ–∞ –љ–∞—З–∞–ї—М–љ—Г—О —В–Њ—З–Ї—Г –њ–Њ–ї–µ—В–∞ –Є –љ–∞—З–∞–ї—М–љ–Њ–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –Ы—Г–љ—Л. –Ф–ї—П –њ–µ—А–µ—Е–Њ–і–∞ –Ї –±–µ–Ј—А–∞–Ј–Љ–µ—А–љ—Л–Љ –Ї–Њ–Њ—А–і–Є–љ–∞—В–∞–Љ –≤–Њ—Б–њ–Њ–ї—М–Ј—Г–µ–Љ—Б—П —Д–Њ—А–Љ—Г–ї–∞–Љ–Є (5): x = rќЊ, y = rќЈ. –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 10 / 19
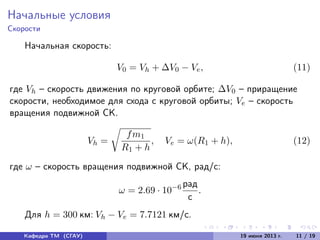
- 11. –Э–∞—З–∞–ї—М–љ—Л–µ —Г—Б–ї–Њ–≤–Є—П –°–Ї–Њ—А–Њ—Б—В–Є –Э–∞—З–∞–ї—М–љ–∞—П —Б–Ї–Њ—А–Њ—Б—В—М: V0 = Vh + вИЖV0 вИТ Ve, (11) –≥–і–µ Vh вАУ —Б–Ї–Њ—А–Њ—Б—В—М –і–≤–Є–ґ–µ–љ–Є—П –њ–Њ –Ї—А—Г–≥–Њ–≤–Њ–є –Њ—А–±–Є—В–µ; вИЖV0 вАУ –њ—А–Є—А–∞—Й–µ–љ–Є–µ —Б–Ї–Њ—А–Њ—Б—В–Є, –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ–µ –і–ї—П —Б—Е–Њ–і–∞ —Б –Ї—А—Г–≥–Њ–≤–Њ–є –Њ—А–±–Є—В—Л; Ve вАУ —Б–Ї–Њ—А–Њ—Б—В—М –≤—А–∞—Й–µ–љ–Є—П –њ–Њ–і–≤–Є–ґ–љ–Њ–є –°–Ъ. Vh = fm1 R1 + h , Ve = ѕЙ(R1 + h), (12) –≥–і–µ ѕЙ вАУ —Б–Ї–Њ—А–Њ—Б—В—М –≤—А–∞—Й–µ–љ–Є—П –њ–Њ–і–≤–Є–ґ–љ–Њ–є –°–Ъ, —А–∞–і/—Б: ѕЙ = 2.69 ¬Ј 10вИТ6 —А–∞–і —Б . –Ф–ї—П h = 300 –Ї–Љ: Vh вИТ Ve = 7.7121 –Ї–Љ/—Б. –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 11 / 19
- 12. –†–µ–Ј—Г–ї—М—В–∞—В—Л –Є–љ—В–µ–≥—А–Є—А–Њ–≤–∞–љ–Є—П –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 12 / 19
- 13. –Ґ—А–∞–µ–Ї—В–Њ—А–Є–Є –і–≤–Є–ґ–µ–љ–Є—П –Ъ–Р –Э–∞—З–∞–ї—М–љ—Л–µ —Г—Б–ї–Њ–≤–Є—П: ѕЖ = ѕА/2, V0 = 10.5758 –Ї–Љ/—Б 0.0 0.2 0.4 0.6 0.8 1.0 1.2 0.4 0.2 0.0 0.2 0.4 0.6 0.8 1.0 ќЮ ќЧ 0.2 0.0 0.2 0.4 0.6 0.8 1.0 0.0 0.2 0.4 0.6 0.8 1.0 1.2 x y VL2 = 1.0726 –Ї–Љ/—Б; t = 6.8 —Б—Г—В. –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 13 / 19
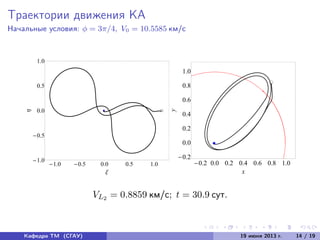
- 14. –Ґ—А–∞–µ–Ї—В–Њ—А–Є–Є –і–≤–Є–ґ–µ–љ–Є—П –Ъ–Р –Э–∞—З–∞–ї—М–љ—Л–µ —Г—Б–ї–Њ–≤–Є—П: ѕЖ = 3ѕА/4, V0 = 10.5585 –Ї–Љ/—Б 1.0 0.5 0.0 0.5 1.0 1.0 0.5 0.0 0.5 1.0 ќЮ ќЧ 0.2 0.0 0.2 0.4 0.6 0.8 1.0 0.2 0.0 0.2 0.4 0.6 0.8 1.0 xy VL2 = 0.8859 –Ї–Љ/—Б; t = 30.9 —Б—Г—В. –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 14 / 19
- 15. –Ґ—А–∞–µ–Ї—В–Њ—А–Є–Є –і–≤–Є–ґ–µ–љ–Є—П –Ъ–Р –Э–∞—З–∞–ї—М–љ—Л–µ —Г—Б–ї–Њ–≤–Є—П: ѕЖ = ѕА, V0 = 10.6101 –Ї–Љ/—Б 2 1 0 1 1 0 1 2 ќЮ ќЧ 0.0 0.5 1.0 1.5 2.0 1.0 0.5 0.0 0.5 1.0 x y VL2 = 1.3707 –Ї–Љ/—Б; t = 28 —Б—Г—В. –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 15 / 19
- 16. –Ґ—А–∞–µ–Ї—В–Њ—А–Є–Є –і–≤–Є–ґ–µ–љ–Є—П –Ъ–Р –Э–∞—З–∞–ї—М–љ—Л–µ —Г—Б–ї–Њ–≤–Є—П: ѕЖ = 3ѕА/4, V0 = 10.8758 –Ї–Љ/—Б 0.0 0.2 0.4 0.6 0.8 1.0 1.2 0.4 0.2 0.0 0.2 0.4 ќЮ ќЧ 0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 0.2 0.0 0.2 0.4 0.6 xy VL2 = 2.7542 –Ї–Љ/—Б; t = 1.6 —Б—Г—В. –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 16 / 19
- 17. –Ґ—А–∞–µ–Ї—В–Њ—А–Є–Є –і–≤–Є–ґ–µ–љ–Є—П –Ъ–Р –Э–∞—З–∞–ї—М–љ—Л–µ —Г—Б–ї–Њ–≤–Є—П: ѕЖ = ѕА, V0 = 10.5962 –Ї–Љ/—Б 1.0 0.5 0.0 0.5 1.0 1.0 0.5 0.0 0.5 ќЮ ќЧ 0.0 0.2 0.4 0.6 0.8 1.0 0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 x y V1 = 1.5765 –Ї–Љ/—Б, вИЖV = вИТ0.625 –Ї–Љ/—Б, VL2 = 0.0465 –Ї–Љ/—Б, t = 3.87 —Б—Г—В. –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 17 / 19
- 18. –°–њ–Є—Б–Њ–Ї –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–љ—Л—Е –Є—Б—В–Њ—З–љ–Є–Ї–Њ–≤ 1. –Ь–∞—А–Ї–µ–µ–≤, –Р.–Я. –Ґ–Њ—З–Ї–Є –ї–Є–±—А–∞—Ж–Є–Є –≤ –љ–µ–±–µ—Б–љ–Њ–є –Љ–µ—Е–∞–љ–Є–Ї–µ –Є –Ї–Њ—Б–Љ–Њ–і–Є–љ–∞–Љ–Є–Ї–µ [–Ґ–µ–Ї—Б—В]/–Р.–Я. –Ь–∞—А–Ї–µ–µ–≤. вАУ –Ь.:–Э–∞—Г–Ї–∞, 1978. вАУ 312 —Б—В—А. 2. –Ы–µ–≤–∞–љ—В–Њ–≤—Б–Ї–Є–є, –Т.–Ш. –Ь–µ—Е–∞–љ–Є–Ї–∞ –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ –њ–Њ–ї–µ—В–∞ –≤ —Н–ї–µ–Љ–µ–љ—В–∞—А–љ–Њ–Љ –Є–Ј–ї–Њ–ґ–µ–љ–Є–Є [–Ґ–µ–Ї—Б—В]/–Т.–Ш. –Ы–µ–≤–∞–љ—В–Њ–≤—Б–Ї–Є–є. вАУ –Ь.: –Э–∞—Г–Ї–∞, 1980. вАУ 512 —Б—В—А. 3. –Ф—Г–±–Њ—И–Є–љ, –У.–Э. –Э–µ–±–µ—Б–љ–∞—П –Љ–µ—Е–∞–љ–Є–Ї–∞. –Р–љ–∞–ї–Є—В–Є—З–µ—Б–Ї–Є–µ –Є –Ї–∞—З–µ—Б—В–≤–µ–љ–љ—Л–µ –Љ–µ—В–Њ–і—Л [–Ґ–µ–Ї—Б—В]/–У.–Э. –Ф—Г–±–Њ—И–Є–љ. вАУ –Ь.: –Э–∞—Г–Ї–∞, 1978. вАУ 456 —Б—В—А. –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 18 / 19
- 19. –С–ї–∞–≥–Њ–і–∞—А—О –Ј–∞ –≤–љ–Є–Љ–∞–љ–Є–µ! –Ъ–∞—Д–µ–і—А–∞ –Ґ–Ь (–°–У–Р–£) 19 –Є—О–љ—П 2013 –≥. 19 / 19