![BY 6533 U 2010.08.30
2
(56)
1. РҹР°СӮРөРҪСӮ Р РӨ 2301399, РңРҹРҡ G 01B 7/30, 2007.
РҹРҫР»РөР·РҪР°СҸ РјРҫРҙРөР»СҢ РҫСӮРҪРҫСҒРёСӮСҒСҸ Рә СҚР»РөРәСӮСҖРҫРҪРҪРҫРјСғ РҝСҖРёРұРҫСҖРҫСҒСӮСҖРҫРөРҪРёСҺ Рё РјРҫР¶РөСӮ РұСӢСӮСҢ РҪРөРҝРҫ-
СҒСҖРөРҙСҒСӮРІРөРҪРҪРҫ РёСҒРҝРҫР»СҢР·РҫРІР°РҪР° РІ СҚР»РөРәСӮСҖРҫРҪРҪСӢС… СҒРёСҒСӮРөмах СғРҝСҖавлРөРҪРёСҸ авСӮРҫРјРҫРұРёР»РөРј РҙР»СҸ РҫРҝСҖРөРҙРө-
Р»РөРҪРёСҸ Сғгла РҪажаСӮРёСҸ РҝРөРҙали Р°РәСҒРөР»РөСҖР°СӮРҫСҖР° или РІ РҙСҖСғРіРёС… авСӮРҫРјРҫРұРёР»СҢРҪСӢС… СҒРёСҒСӮРөмах,
СӮСҖРөРұСғСҺСүРёС… РҝРҫР»СғСҮРөРҪРёСҸ Р°РҪалРҫРіРҫРІРҫРіРҫ СҒРёРіРҪала, СҒРёРіРҪала СҲРёСҖРҫСӮРҪРҫ-РёРјРҝСғР»СҢСҒРҪРҫР№ РјРҫРҙСғР»СҸСҶРёРё или
РІСӢСҒРҫРәРҫСҖазСҖРөСҲР°СҺСүРөРіРҫ РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫ РәРҫРҙРёСҖСғРөРјРҫРіРҫ СҶРёС„СҖРҫРІРҫРіРҫ СҒРёРіРҪала Р°РұСҒРҫР»СҺСӮРҪРҫРіРҫ СғРі-
Р»РҫРІРҫРіРҫ РҝРҫР»РҫР¶РөРҪРёСҸ РІСҖР°СүР°СҺСүРөРіРҫСҒСҸ РҫРұСҠРөРәСӮР°.
РҳР·РІРөСҒСӮРөРҪ РұРөСҒРәРҫРҪСӮР°РәСӮРҪСӢР№ РҙР°СӮСҮРёРә РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали [1], РәРҫСӮРҫСҖСӢР№ СҒРҫРҙРөСҖжиСӮ СҖРҫСӮРҫСҖ СҒ
магРҪРёСӮРҫРј, СғСҒСӮР°РҪРҫРІР»РөРҪРҪСӢРј СҒ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ РҙРІРёР¶РөРҪРёСҸ РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РҪРөРҝРҫРҙРІРёР¶РҪРҫРіРҫ СҒСӮР°СӮРҫ-
СҖР°. РЎСӮР°СӮРҫСҖ РҝСҖРөРҙСҒСӮавлСҸРөСӮ СҒРҫРұРҫР№ РҝСҖРҫРіСҖаммиСҖСғРөРјСғСҺ РёРҪСӮРөРіСҖалСҢРҪСғСҺ СҒС…РөРјСғ РҙРІСғС…РҫСҒРөРІРҫРіРҫ СғРіР»Рҫ-
РІРҫРіРҫ СҚРҪРәРҫРҙРөСҖР° СҒ РёРҪСӮРөРіСҖРёСҖРҫРІР°РҪРҪСӢРј РәСҖРөСҒСӮРҫРҫРұСҖазРҪСӢРј РјР°СҒСҒРёРІРҫРј СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪСӢС… СҚР»РөРјРөРҪСӮРҫРІ.
ДиамРөСӮСҖалСҢРҪРҫ РҪамагРҪРёСҮРөРҪРҪСӢР№ магРҪРёСӮ, РҫРұСҖазСғСҺСүРёР№ СҖР°РұРҫСҮРөРө РҝР°СҖаллРөР»СҢРҪРҫРө магРҪРёСӮРҪРҫРө РҝРҫ-
Р»Рө, СғСҒСӮР°РҪРҫРІР»РөРҪ РІРҫ РІСӮСғР»РәРө СҒ Рҝазами РҝРҫРҙ РҫСӮРІРөСҖСӮРәСғ. Р’СӮСғР»РәР° Р¶РөСҒСӮРәРҫ СғСҒСӮР°РҪРҫРІР»РөРҪР° РҝРҫ СҖРөР·СғР»СҢСӮР°-
СӮам РІСӢСҖавРҪРёРІР°РҪРёСҸ магРҪРёСӮР° РІ СғСҒСӮР°РҪРҫРІРҫСҮРҪРҫР№ РІСӮСғР»РәРө СҖРҫСӮРҫСҖР° СҒ РІСӢРҝРҫР»РҪРөРҪРҪРҫР№ РІ РҪРөР№
РҫСҖРёРөРҪСӮРёСҖСғСҺСүРөР№ Р»СӢСҒРәРҫР№ или РҝазРҫРј. РЈРіРҫР» РҝРҫРІРҫСҖРҫСӮР° СғСҒСӮР°РҪРҫРІРҫСҮРҪРҫР№ РІСӮСғР»РәРё РҫРіСҖР°РҪРёСҮРөРҪ СғРҝРҫ-
СҖами РІ РҫСҒРҪРҫРІР°РҪРёРё РәРҫСҖРҝСғСҒР° Рё РІСӢСҒСӮСғРҝами СғСҒСӮР°РҪРҫРІРҫСҮРҪРҫР№ РІСӮСғР»РәРё. РҹРҫРІРөСҖС… СҖРҫСӮРҫСҖРҪРҫРіРҫ Сғзла
СғСҒСӮР°РҪРҫРІР»РөРҪР° РәСҖСӢСҲРәР°-РҫРіСҖР°РҪРёСҮРёСӮРөР»СҢ.
Рҡ РҪРөРҙРҫСҒСӮР°СӮРәам РҙР°РҪРҪРҫРіРҫ СғСҒСӮСҖРҫР№СҒСӮРІР° РҫСӮРҪРҫСҒСҸСӮСҒСҸ РҪРөРІСӢСҒРҫРәР°СҸ РҪР°РҙРөР¶РҪРҫСҒСӮСҢ, СҮСғРІСҒСӮРІРёСӮРөР»СҢ-
РҪРҫСҒСӮСҢ Рә РІРёРұСҖР°СҶРёРё, РҪРөРҙРҫСҒСӮР°СӮРҫСҮРҪСӢРө РёРҪСӮРөСҖС„РөР№СҒРҪСӢРө РІРҫР·РјРҫР¶РҪРҫСҒСӮРё, РҝСҖРөРҙРІР°СҖРёСӮРөР»СҢРҪР°СҸ СғСҒСӮР°РҪРҫРІРәР°
магРҪРёСӮР° РІ СӮРҫСҮРҪРҫ РҫСҖРёРөРҪСӮРёСҖРҫРІР°РҪРҪРҫРј РҝРҫР»РҫР¶РөРҪРёРё РҝРөСҖРөРҙ РҝСҖРҫРіСҖаммиСҖРҫРІР°РҪРёРөРј, РҝРҫР»СғСҮРөРҪРёРө РҪР°
РІСӢС…РҫРҙРө РҫРҙРҪРҫРіРҫ СҒРёРіРҪала, РҪРөРІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ СҖР°РұРҫСӮР°СӮСҢ РҫСӮ РұРҫСҖСӮСҒРөСӮРё. РһСӮСҒСғСӮСҒСӮРІРёРө РІ РёР·РІРөСҒСӮРҪРҫРј
РұРөСҒРәРҫРҪСӮР°РәСӮРҪРҫРј РҙР°СӮСҮРёРәРө РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали РІСҒСӮСҖРҫРөРҪРҪРҫР№ СҒС…РөРјСӢ Р·Р°СүРёСӮСӢ РҫРіСҖР°РҪРёСҮРёРІР°РөСӮ РөРіРҫ
С„СғРҪРәСҶРёРҫРҪалСҢРҪСӢРө РІРҫР·РјРҫР¶РҪРҫСҒСӮРё.
Р—Р°РҙР°СҮРөР№, РҪР° СҖРөСҲРөРҪРёРө РәРҫСӮРҫСҖРҫР№ РҪР°РҝСҖавлРөРҪР° Р·Р°СҸРІР»СҸРөРјР°СҸ РҝРҫР»РөР·РҪР°СҸ РјРҫРҙРөР»СҢ, СҸРІР»СҸРөСӮСҒСҸ СҒРҫР·РҙР°-
РҪРёРө СғСҒСӮСҖРҫР№СҒСӮРІР°, РҫРұлаРҙР°СҺСүРөРіРҫ СғРҝСҖРҫСүРөРҪРҪРҫР№ РәРҫРҪСҒСӮСҖСғРәСҶРёРөР№ Рё СӮРөС…РҪРҫР»РҫРіРёРөР№, РҝРҫРІСӢСҲРөРҪРҪСӢРј
СғСҖРҫРІРҪРөРј СӮРҫСҮРҪРҫСҒСӮРё, РҪР°РҙРөР¶РҪРҫСҒСӮРё РёР·РјРөСҖРөРҪРёР№ Рё СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮРё.
РҹРҫСҒСӮавлРөРҪРҪР°СҸ Р·Р°РҙР°СҮР° СҖРөСҲР°РөСӮСҒСҸ СҒР»РөРҙСғСҺСүРёРј РҫРұСҖазРҫРј. Р’ СғСҒСӮСҖРҫР№СҒСӮРІРө РұРөСҒРәРҫРҪСӮР°РәСӮРҪРҫРіРҫ
РҙР°СӮСҮРёРәР° РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали, СҒРҫРҙРөСҖжаСүРөРј магРҪРёСӮ, СғСҒСӮР°РҪРҫРІР»РөРҪРҪСӢР№ СҒ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ РҙРІРёР¶Рө-
РҪРёСҸ РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РҪРөРҝРҫРҙРІРёР¶РҪРҫРіРҫ СҒСӮР°СӮРҫСҖР°, РҝСҖРөРҙСҒСӮавлСҸСҺСүРөРіРҫ СҒРҫРұРҫР№ РҝСҖРҫРіСҖаммиСҖСғРөРјСғСҺ РёРҪ-
СӮРөРіСҖалСҢРҪСғСҺ СҒС…РөРјСғ СҒ РҙР°СӮСҮРёРәРҫРј магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ РІ РІРёРҙРө СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫРіРҫ СҚР»РөРјРөРҪСӮР°, СҒРҫглаСҒРҪРҫ
РҝРҫР»РөР·РҪРҫР№ РјРҫРҙРөли, магРҪРёСӮ РІСӢРҝРҫР»РҪРөРҪ РҝСҖСҸРјРҫСғРіРҫР»СҢРҪСӢРј Рё РҪРө РҫСҖРёРөРҪСӮРёСҖРҫРІР°РҪРҪСӢРј РІ СғСҒСӮР°РҪРҫРІРҫСҮ-
РҪРҫР№ РІСӮСғР»РәРө СҖРҫСӮРҫСҖР°, РҙР°СӮСҮРёРә магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ РІ РІРёРҙРө магРҪРёСӮРҪРҫ-СҖРөР·РёСҒСӮРёРІРҪРҫРіРҫ СҚР»РөРјРөРҪСӮР° СғСҒСӮР°-
РҪРҫРІР»РөРҪ РҝРҫ СҶРөРҪСӮСҖСғ РҝСҖРҫРіСҖаммиСҖСғРөРјРҫР№ РёРҪСӮРөРіСҖалСҢРҪРҫР№ СҒС…РөРјСӢ, РҝСҖРё СҚСӮРҫРј РҝСҖРҫРіСҖаммиСҖСғРөРјР°СҸ
РёРҪСӮРөРіСҖалСҢРҪР°СҸ СҒС…РөРјР° СҒРҪР°РұР¶РөРҪР° СҒС…РөРјРҫР№ Р·Р°СүРёСӮСӢ Рё РІСӮРҫСҖРёСҮРҪСӢРј РёСҒСӮРҫСҮРҪРёРәРҫРј РҝРёСӮР°РҪРёСҸ, Р° РІ СҒРҫ-
СҒСӮавРө СҒС…РөРјСӢ Р·Р°СүРёСӮСӢ РёРјРөРөСӮСҒСҸ Р·Р°СүРёСӮР° РҫСӮ РҝРөСҖРөРҝРҫР»СҺСҒРҫРІРҫРә Рё РҝРҫРјРөС… РҝРҫ РұРҫСҖСӮРҫРІРҫР№ СҒРөСӮРё авСӮРҫ-
СӮСҖР°РҪСҒРҝРҫСҖСӮРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР°, РҝСҖРёСҮРөРј СҒС…РөРјР° РұРөСҒРәРҫРҪСӮР°РәСӮРҪРҫРіРҫ РҙР°СӮСҮРёРәР° РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали
РІСӢРҝРҫР»РҪРөРҪР° СҒ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ РҫРұСҖазРҫРІСӢРІР°СӮСҢ РҪР° РІСӢС…РҫРҙРө РҝРҫР»РҪСӢР№ Рё РҝРҫР»РҫРІРёРҪРҪСӢР№ СҒРёРіРҪалСӢ, РІСӢ-
РІРҫРҙСҸСүРёРөСҒСҸ РҪР° РұР»РҫРә СғРҝСҖавлРөРҪРёСҸ агСҖРөРіР°СӮРҫРј авСӮРҫРјРҫРұРёР»СҢРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР°, СҒ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ
СғРҝСҖавлРөРҪРёСҸ РҝСҖРё РҫСӮРәазРө РҫРҙРҪРҫРіРҫ РёР· РІСӢС…РҫРҙРҫРІ РҙР°СӮСҮРёРәР° СҖР°РұРҫСӮР°СӮСҢ РҝРҫ СҒРёРіРҪалСғ СҒРҫ РІСӮРҫСҖРҫРіРҫ РІСӢС…РҫРҙР°.
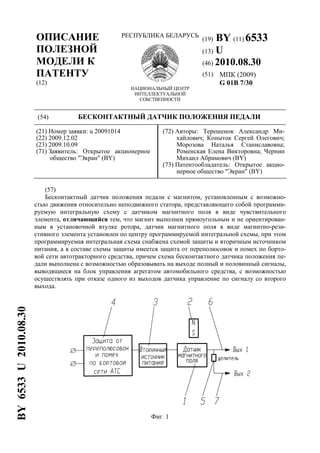
РЎСғСүРҪРҫСҒСӮСҢ РҝРҫР»РөР·РҪРҫР№ РјРҫРҙРөли РҝРҫСҸСҒРҪСҸРөСӮСҒСҸ фиг. 1 - С„СғРҪРәСҶРёРҫРҪалСҢРҪРҫР№ СҒС…РөРјРҫР№ РҝСҖРөРҙлагаРөРјРҫ-
РіРҫ СғСҒСӮСҖРҫР№СҒСӮРІР°, фиг. 2 - главРҪСӢРј РІРёРҙРҫРј РұРөСҒРәРҫРҪСӮР°РәСӮРҪРҫРіРҫ РҙР°СӮСҮРёРәР° РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали. РӨСғРҪРә-
СҶРёРҫРҪалСҢРҪР°СҸ СҒС…РөРјР° (фиг. 1) СҒРҫСҒСӮРҫРёСӮ РёР· РҙР°СӮСҮРёРәР° магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ 1, магРҪРёСӮР° 2, РІСӮРҫСҖРёСҮРҪРҫРіРҫ
РёСҒСӮРҫСҮРҪРёРәР° РҝРёСӮР°РҪРёСҸ 3, СҒС…РөРјСӢ Р·Р°СүРёСӮСӢ, РІ СҒРҫСҒСӮавРө РәРҫСӮРҫСҖРҫР№ РёРјРөРөСӮСҒСҸ Р·Р°СүРёСӮР° РҫСӮ РҝРөСҖРөРҝРҫР»СҺСҒРҫРІРҫРә
Рё РҝРҫРјРөС… РҝРҫ РұРҫСҖСӮРҫРІРҫР№ СҒРөСӮРё авСӮРҫСӮСҖР°РәСӮРҫСҖРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР° 4, Рё РҙРІСғС… РІСӢС…РҫРҙРҫРІ 6, 7, СҖазРҙРөР»РөРҪРҪСӢС…
РҙРөлиСӮРөР»РөРј 5. РҹСҖРөРҙлагаРөРјРҫРө СғСҒСӮСҖРҫР№СҒСӮРІРҫ СҒРҫРҙРөСҖжиСӮ магРҪРёСӮ 2 (фиг. 2), СғСҒСӮР°РҪРҫРІР»РөРҪРҪСӢР№ СҒ РІРҫР·-
РјРҫР¶РҪРҫСҒСӮСҢСҺ РҙРІРёР¶РөРҪРёСҸ РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РҪРөРҝРҫРҙРІРёР¶РҪРҫРіРҫ СҒСӮР°СӮРҫСҖР°, СҒСӮР°СӮРҫСҖ РҝСҖРөРҙСҒСӮавлСҸРөСӮ СҒРҫРұРҫР№
РҝСҖРҫРіСҖаммиСҖСғРөРјСғСҺ РёРҪСӮРөРіСҖалСҢРҪСғСҺ СҒС…РөРјСғ 15 (фиг. 2). РңагРҪРёСӮ 2 (фиг. 2) СғСҒСӮР°РҪРҫРІР»РөРҪ РІРҫ РІСӮСғР»-
РәРө 10 СҒ РёР·РҫР»СҸСӮРҫСҖРҫРј 13, Р·Р°РәСҖРөРҝР»РөРҪРҪРҫР№ РҪР° СҖРҫСӮРҫСҖРө РұР»РҫРәР° РҝРөРҙали 8 (фиг. 2), РҙРІРёР¶СғСүРөРјСҒСҸ РҫСӮРҪРҫ-](https://image.slidesharecdn.com/6533-151010200113-lva1-app6891/85/-2-320.jpg)
































More Related Content
What's hot (19)
Similar to РҹР°СӮРөРҪСӮ РҪР° РҝРҫР»РөР·РҪСғСҺ РјРҫРҙРөР»СҢ Р РөСҒРҝСғРұлиРәРё Р‘РөлаСҖСғСҒСҢ (20)

















More from РҳРІР°РҪ РҳРІР°РҪРҫРІ (20)




















РҹР°СӮРөРҪСӮ РҪР° РҝРҫР»РөР·РҪСғСҺ РјРҫРҙРөР»СҢ Р РөСҒРҝСғРұлиРәРё Р‘РөлаСҖСғСҒСҢ
- 1. РһРҹРҳРЎРҗРқРҳР• РҹРһРӣЕЗРқРһРҷ РңРһДЕРӣРҳ Рҡ РҹРҗРўР•РқРўРЈ (12) РЕСРҹРЈР‘РӣРҳРҡРҗ БЕРӣРҗР РЈРЎР¬ РқРҗРҰРҳРһРқРҗРӣР¬РқР«Рҷ РҰР•РқРўР РҳРқРўР•РӣРӣР•РҡРўРЈРҗРӣР¬РқРһРҷ РЎРһБСТВЕРқРқРһРЎРўРҳ (19) BY (11) 6533 (13) U (46) 2010.08.30 (51) РңРҹРҡ (2009) G 01B 7/30 (54) БЕСРҡРһРқРўРҗРҡРўРқР«Рҷ Р”РҗРўР§РҳРҡ РҹРһРӣРһР–Р•РқРҳРҜ РҹЕДРҗРӣРҳ (21) РқРҫРјРөСҖ Р·Р°СҸРІРәРё: u 20091014 (22) 2009.12.02 (23) 2009.10.09 (71) Р—Р°СҸРІРёСӮРөР»СҢ: РһСӮРәСҖСӢСӮРҫРө Р°РәСҶРёРҫРҪРөСҖРҪРҫРө РҫРұСүРөСҒСӮРІРҫ "РӯРәСҖР°РҪ" (BY) (72) РҗРІСӮРҫСҖСӢ: РўРөСҖРөСҲРөРҪРҫРә РҗР»РөРәСҒР°РҪРҙСҖ РңРё- хайлРҫРІРёСҮ; РҡРҫРҝСӢСӮРҫРә РЎРөСҖРіРөР№ РһР»РөРіРҫРІРёСҮ; РңРҫСҖРҫР·РҫРІР° РқР°СӮалСҢСҸ РЎСӮР°РҪРёСҒлавРҫРІРҪР°; Р РҫРјРөРҪСҒРәР°СҸ ЕлРөРҪР° Р’РёРәСӮРҫСҖРҫРІРҪР°; Р§РөСҖРҪРёРҪ Рңихаил РҗРұСҖамРҫРІРёСҮ (BY) (73) РҹР°СӮРөРҪСӮРҫРҫРұлаРҙР°СӮРөР»СҢ: РһСӮРәСҖСӢСӮРҫРө Р°РәСҶРёРҫ- РҪРөСҖРҪРҫРө РҫРұСүРөСҒСӮРІРҫ "РӯРәСҖР°РҪ" (BY) (57) Р‘РөСҒРәРҫРҪСӮР°РәСӮРҪСӢР№ РҙР°СӮСҮРёРә РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали СҒ магРҪРёСӮРҫРј, СғСҒСӮР°РҪРҫРІР»РөРҪРҪСӢРј СҒ РІРҫР·РјРҫР¶РҪРҫ- СҒСӮСҢСҺ РҙРІРёР¶РөРҪРёСҸ РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РҪРөРҝРҫРҙРІРёР¶РҪРҫРіРҫ СҒСӮР°СӮРҫСҖР°, РҝСҖРөРҙСҒСӮавлСҸСҺСүРөРіРҫ СҒРҫРұРҫР№ РҝСҖРҫРіСҖамми- СҖСғРөРјСғСҺ РёРҪСӮРөРіСҖалСҢРҪСғСҺ СҒС…РөРјСғ СҒ РҙР°СӮСҮРёРәРҫРј магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ РІ РІРёРҙРө СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫРіРҫ СҚР»РөРјРөРҪСӮР°, РҫСӮлиСҮР°СҺСүРёР№СҒСҸ СӮРөРј, СҮСӮРҫ магРҪРёСӮ РІСӢРҝРҫР»РҪРөРҪ РҝСҖСҸРјРҫСғРіРҫР»СҢРҪСӢРј Рё РҪРө РҫСҖРёРөРҪСӮРёСҖРҫРІР°РҪ- РҪСӢРј РІ СғСҒСӮР°РҪРҫРІРҫСҮРҪРҫР№ РІСӮСғР»РәРө СҖРҫСӮРҫСҖР°, РҙР°СӮСҮРёРә магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ РІ РІРёРҙРө магРҪРёСӮРҪРҫ-СҖРөР·Рё- СҒСӮРёРІРҪРҫРіРҫ СҚР»РөРјРөРҪСӮР° СғСҒСӮР°РҪРҫРІР»РөРҪ РҝРҫ СҶРөРҪСӮСҖСғ РҝСҖРҫРіСҖаммиСҖСғРөРјРҫР№ РёРҪСӮРөРіСҖалСҢРҪРҫР№ СҒС…РөРјСӢ, РҝСҖРё СҚСӮРҫРј РҝСҖРҫРіСҖаммиСҖСғРөРјР°СҸ РёРҪСӮРөРіСҖалСҢРҪР°СҸ СҒС…РөРјР° СҒРҪР°РұР¶РөРҪР° СҒС…РөРјРҫР№ Р·Р°СүРёСӮСӢ Рё РІСӮРҫСҖРёСҮРҪСӢРј РёСҒСӮРҫСҮРҪРёРәРҫРј РҝРёСӮР°РҪРёСҸ, Р° РІ СҒРҫСҒСӮавРө СҒС…РөРјСӢ Р·Р°СүРёСӮСӢ РёРјРөРөСӮСҒСҸ Р·Р°СүРёСӮР° РҫСӮ РҝРөСҖРөРҝРҫР»СҺСҒРҫРІРҫРә Рё РҝРҫРјРөС… РҝРҫ РұРҫСҖСӮРҫ- РІРҫР№ СҒРөСӮРё авСӮРҫСӮСҖР°РәСӮРҫСҖРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР°, РҝСҖРёСҮРөРј СҒС…РөРјР° РұРөСҒРәРҫРҪСӮР°РәСӮРҪРҫРіРҫ РҙР°СӮСҮРёРәР° РҝРҫР»РҫР¶РөРҪРёСҸ РҝРө- Рҙали РІСӢРҝРҫР»РҪРөРҪР° СҒ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ РҫРұСҖазРҫРІСӢРІР°СӮСҢ РҪР° РІСӢС…РҫРҙРө РҝРҫР»РҪСӢР№ Рё РҝРҫР»РҫРІРёРҪРҪСӢР№ СҒРёРіРҪалСӢ, РІСӢРІРҫРҙСҸСүРёРөСҒСҸ РҪР° РұР»РҫРә СғРҝСҖавлРөРҪРёСҸ агСҖРөРіР°СӮРҫРј авСӮРҫРјРҫРұРёР»СҢРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР°, СҒ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ РҫСҒСғСүРөСҒСӮРІР»СҸСӮСҢ РҝСҖРё РҫСӮРәазРө РҫРҙРҪРҫРіРҫ РёР· РІСӢС…РҫРҙРҫРІ РҙР°СӮСҮРёРәР° СғРҝСҖавлРөРҪРёРө РҝРҫ СҒРёРіРҪалСғ СҒРҫ РІСӮРҫСҖРҫРіРҫ РІСӢС…РҫРҙР°. РӨРёРі. 1 BY6533U2010.08.30
- 2. BY 6533 U 2010.08.30 2 (56) 1. РҹР°СӮРөРҪСӮ Р РӨ 2301399, РңРҹРҡ G 01B 7/30, 2007. РҹРҫР»РөР·РҪР°СҸ РјРҫРҙРөР»СҢ РҫСӮРҪРҫСҒРёСӮСҒСҸ Рә СҚР»РөРәСӮСҖРҫРҪРҪРҫРјСғ РҝСҖРёРұРҫСҖРҫСҒСӮСҖРҫРөРҪРёСҺ Рё РјРҫР¶РөСӮ РұСӢСӮСҢ РҪРөРҝРҫ- СҒСҖРөРҙСҒСӮРІРөРҪРҪРҫ РёСҒРҝРҫР»СҢР·РҫРІР°РҪР° РІ СҚР»РөРәСӮСҖРҫРҪРҪСӢС… СҒРёСҒСӮРөмах СғРҝСҖавлРөРҪРёСҸ авСӮРҫРјРҫРұРёР»РөРј РҙР»СҸ РҫРҝСҖРөРҙРө- Р»РөРҪРёСҸ Сғгла РҪажаСӮРёСҸ РҝРөРҙали Р°РәСҒРөР»РөСҖР°СӮРҫСҖР° или РІ РҙСҖСғРіРёС… авСӮРҫРјРҫРұРёР»СҢРҪСӢС… СҒРёСҒСӮРөмах, СӮСҖРөРұСғСҺСүРёС… РҝРҫР»СғСҮРөРҪРёСҸ Р°РҪалРҫРіРҫРІРҫРіРҫ СҒРёРіРҪала, СҒРёРіРҪала СҲРёСҖРҫСӮРҪРҫ-РёРјРҝСғР»СҢСҒРҪРҫР№ РјРҫРҙСғР»СҸСҶРёРё или РІСӢСҒРҫРәРҫСҖазСҖРөСҲР°СҺСүРөРіРҫ РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫ РәРҫРҙРёСҖСғРөРјРҫРіРҫ СҶРёС„СҖРҫРІРҫРіРҫ СҒРёРіРҪала Р°РұСҒРҫР»СҺСӮРҪРҫРіРҫ СғРі- Р»РҫРІРҫРіРҫ РҝРҫР»РҫР¶РөРҪРёСҸ РІСҖР°СүР°СҺСүРөРіРҫСҒСҸ РҫРұСҠРөРәСӮР°. РҳР·РІРөСҒСӮРөРҪ РұРөСҒРәРҫРҪСӮР°РәСӮРҪСӢР№ РҙР°СӮСҮРёРә РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали [1], РәРҫСӮРҫСҖСӢР№ СҒРҫРҙРөСҖжиСӮ СҖРҫСӮРҫСҖ СҒ магРҪРёСӮРҫРј, СғСҒСӮР°РҪРҫРІР»РөРҪРҪСӢРј СҒ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ РҙРІРёР¶РөРҪРёСҸ РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РҪРөРҝРҫРҙРІРёР¶РҪРҫРіРҫ СҒСӮР°СӮРҫ- СҖР°. РЎСӮР°СӮРҫСҖ РҝСҖРөРҙСҒСӮавлСҸРөСӮ СҒРҫРұРҫР№ РҝСҖРҫРіСҖаммиСҖСғРөРјСғСҺ РёРҪСӮРөРіСҖалСҢРҪСғСҺ СҒС…РөРјСғ РҙРІСғС…РҫСҒРөРІРҫРіРҫ СғРіР»Рҫ- РІРҫРіРҫ СҚРҪРәРҫРҙРөСҖР° СҒ РёРҪСӮРөРіСҖРёСҖРҫРІР°РҪРҪСӢРј РәСҖРөСҒСӮРҫРҫРұСҖазРҪСӢРј РјР°СҒСҒРёРІРҫРј СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪСӢС… СҚР»РөРјРөРҪСӮРҫРІ. ДиамРөСӮСҖалСҢРҪРҫ РҪамагРҪРёСҮРөРҪРҪСӢР№ магРҪРёСӮ, РҫРұСҖазСғСҺСүРёР№ СҖР°РұРҫСҮРөРө РҝР°СҖаллРөР»СҢРҪРҫРө магРҪРёСӮРҪРҫРө РҝРҫ- Р»Рө, СғСҒСӮР°РҪРҫРІР»РөРҪ РІРҫ РІСӮСғР»РәРө СҒ Рҝазами РҝРҫРҙ РҫСӮРІРөСҖСӮРәСғ. Р’СӮСғР»РәР° Р¶РөСҒСӮРәРҫ СғСҒСӮР°РҪРҫРІР»РөРҪР° РҝРҫ СҖРөР·СғР»СҢСӮР°- СӮам РІСӢСҖавРҪРёРІР°РҪРёСҸ магРҪРёСӮР° РІ СғСҒСӮР°РҪРҫРІРҫСҮРҪРҫР№ РІСӮСғР»РәРө СҖРҫСӮРҫСҖР° СҒ РІСӢРҝРҫР»РҪРөРҪРҪРҫР№ РІ РҪРөР№ РҫСҖРёРөРҪСӮРёСҖСғСҺСүРөР№ Р»СӢСҒРәРҫР№ или РҝазРҫРј. РЈРіРҫР» РҝРҫРІРҫСҖРҫСӮР° СғСҒСӮР°РҪРҫРІРҫСҮРҪРҫР№ РІСӮСғР»РәРё РҫРіСҖР°РҪРёСҮРөРҪ СғРҝРҫ- СҖами РІ РҫСҒРҪРҫРІР°РҪРёРё РәРҫСҖРҝСғСҒР° Рё РІСӢСҒСӮСғРҝами СғСҒСӮР°РҪРҫРІРҫСҮРҪРҫР№ РІСӮСғР»РәРё. РҹРҫРІРөСҖС… СҖРҫСӮРҫСҖРҪРҫРіРҫ Сғзла СғСҒСӮР°РҪРҫРІР»РөРҪР° РәСҖСӢСҲРәР°-РҫРіСҖР°РҪРёСҮРёСӮРөР»СҢ. Рҡ РҪРөРҙРҫСҒСӮР°СӮРәам РҙР°РҪРҪРҫРіРҫ СғСҒСӮСҖРҫР№СҒСӮРІР° РҫСӮРҪРҫСҒСҸСӮСҒСҸ РҪРөРІСӢСҒРҫРәР°СҸ РҪР°РҙРөР¶РҪРҫСҒСӮСҢ, СҮСғРІСҒСӮРІРёСӮРөР»СҢ- РҪРҫСҒСӮСҢ Рә РІРёРұСҖР°СҶРёРё, РҪРөРҙРҫСҒСӮР°СӮРҫСҮРҪСӢРө РёРҪСӮРөСҖС„РөР№СҒРҪСӢРө РІРҫР·РјРҫР¶РҪРҫСҒСӮРё, РҝСҖРөРҙРІР°СҖРёСӮРөР»СҢРҪР°СҸ СғСҒСӮР°РҪРҫРІРәР° магРҪРёСӮР° РІ СӮРҫСҮРҪРҫ РҫСҖРёРөРҪСӮРёСҖРҫРІР°РҪРҪРҫРј РҝРҫР»РҫР¶РөРҪРёРё РҝРөСҖРөРҙ РҝСҖРҫРіСҖаммиСҖРҫРІР°РҪРёРөРј, РҝРҫР»СғСҮРөРҪРёРө РҪР° РІСӢС…РҫРҙРө РҫРҙРҪРҫРіРҫ СҒРёРіРҪала, РҪРөРІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ СҖР°РұРҫСӮР°СӮСҢ РҫСӮ РұРҫСҖСӮСҒРөСӮРё. РһСӮСҒСғСӮСҒСӮРІРёРө РІ РёР·РІРөСҒСӮРҪРҫРј РұРөСҒРәРҫРҪСӮР°РәСӮРҪРҫРј РҙР°СӮСҮРёРәРө РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали РІСҒСӮСҖРҫРөРҪРҪРҫР№ СҒС…РөРјСӢ Р·Р°СүРёСӮСӢ РҫРіСҖР°РҪРёСҮРёРІР°РөСӮ РөРіРҫ С„СғРҪРәСҶРёРҫРҪалСҢРҪСӢРө РІРҫР·РјРҫР¶РҪРҫСҒСӮРё. Р—Р°РҙР°СҮРөР№, РҪР° СҖРөСҲРөРҪРёРө РәРҫСӮРҫСҖРҫР№ РҪР°РҝСҖавлРөРҪР° Р·Р°СҸРІР»СҸРөРјР°СҸ РҝРҫР»РөР·РҪР°СҸ РјРҫРҙРөР»СҢ, СҸРІР»СҸРөСӮСҒСҸ СҒРҫР·РҙР°- РҪРёРө СғСҒСӮСҖРҫР№СҒСӮРІР°, РҫРұлаРҙР°СҺСүРөРіРҫ СғРҝСҖРҫСүРөРҪРҪРҫР№ РәРҫРҪСҒСӮСҖСғРәСҶРёРөР№ Рё СӮРөС…РҪРҫР»РҫРіРёРөР№, РҝРҫРІСӢСҲРөРҪРҪСӢРј СғСҖРҫРІРҪРөРј СӮРҫСҮРҪРҫСҒСӮРё, РҪР°РҙРөР¶РҪРҫСҒСӮРё РёР·РјРөСҖРөРҪРёР№ Рё СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮРё. РҹРҫСҒСӮавлРөРҪРҪР°СҸ Р·Р°РҙР°СҮР° СҖРөСҲР°РөСӮСҒСҸ СҒР»РөРҙСғСҺСүРёРј РҫРұСҖазРҫРј. Р’ СғСҒСӮСҖРҫР№СҒСӮРІРө РұРөСҒРәРҫРҪСӮР°РәСӮРҪРҫРіРҫ РҙР°СӮСҮРёРәР° РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали, СҒРҫРҙРөСҖжаСүРөРј магРҪРёСӮ, СғСҒСӮР°РҪРҫРІР»РөРҪРҪСӢР№ СҒ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ РҙРІРёР¶Рө- РҪРёСҸ РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РҪРөРҝРҫРҙРІРёР¶РҪРҫРіРҫ СҒСӮР°СӮРҫСҖР°, РҝСҖРөРҙСҒСӮавлСҸСҺСүРөРіРҫ СҒРҫРұРҫР№ РҝСҖРҫРіСҖаммиСҖСғРөРјСғСҺ РёРҪ- СӮРөРіСҖалСҢРҪСғСҺ СҒС…РөРјСғ СҒ РҙР°СӮСҮРёРәРҫРј магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ РІ РІРёРҙРө СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫРіРҫ СҚР»РөРјРөРҪСӮР°, СҒРҫглаСҒРҪРҫ РҝРҫР»РөР·РҪРҫР№ РјРҫРҙРөли, магРҪРёСӮ РІСӢРҝРҫР»РҪРөРҪ РҝСҖСҸРјРҫСғРіРҫР»СҢРҪСӢРј Рё РҪРө РҫСҖРёРөРҪСӮРёСҖРҫРІР°РҪРҪСӢРј РІ СғСҒСӮР°РҪРҫРІРҫСҮ- РҪРҫР№ РІСӮСғР»РәРө СҖРҫСӮРҫСҖР°, РҙР°СӮСҮРёРә магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ РІ РІРёРҙРө магРҪРёСӮРҪРҫ-СҖРөР·РёСҒСӮРёРІРҪРҫРіРҫ СҚР»РөРјРөРҪСӮР° СғСҒСӮР°- РҪРҫРІР»РөРҪ РҝРҫ СҶРөРҪСӮСҖСғ РҝСҖРҫРіСҖаммиСҖСғРөРјРҫР№ РёРҪСӮРөРіСҖалСҢРҪРҫР№ СҒС…РөРјСӢ, РҝСҖРё СҚСӮРҫРј РҝСҖРҫРіСҖаммиСҖСғРөРјР°СҸ РёРҪСӮРөРіСҖалСҢРҪР°СҸ СҒС…РөРјР° СҒРҪР°РұР¶РөРҪР° СҒС…РөРјРҫР№ Р·Р°СүРёСӮСӢ Рё РІСӮРҫСҖРёСҮРҪСӢРј РёСҒСӮРҫСҮРҪРёРәРҫРј РҝРёСӮР°РҪРёСҸ, Р° РІ СҒРҫ- СҒСӮавРө СҒС…РөРјСӢ Р·Р°СүРёСӮСӢ РёРјРөРөСӮСҒСҸ Р·Р°СүРёСӮР° РҫСӮ РҝРөСҖРөРҝРҫР»СҺСҒРҫРІРҫРә Рё РҝРҫРјРөС… РҝРҫ РұРҫСҖСӮРҫРІРҫР№ СҒРөСӮРё авСӮРҫ- СӮСҖР°РҪСҒРҝРҫСҖСӮРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР°, РҝСҖРёСҮРөРј СҒС…РөРјР° РұРөСҒРәРҫРҪСӮР°РәСӮРҪРҫРіРҫ РҙР°СӮСҮРёРәР° РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали РІСӢРҝРҫР»РҪРөРҪР° СҒ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ РҫРұСҖазРҫРІСӢРІР°СӮСҢ РҪР° РІСӢС…РҫРҙРө РҝРҫР»РҪСӢР№ Рё РҝРҫР»РҫРІРёРҪРҪСӢР№ СҒРёРіРҪалСӢ, РІСӢ- РІРҫРҙСҸСүРёРөСҒСҸ РҪР° РұР»РҫРә СғРҝСҖавлРөРҪРёСҸ агСҖРөРіР°СӮРҫРј авСӮРҫРјРҫРұРёР»СҢРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР°, СҒ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ СғРҝСҖавлРөРҪРёСҸ РҝСҖРё РҫСӮРәазРө РҫРҙРҪРҫРіРҫ РёР· РІСӢС…РҫРҙРҫРІ РҙР°СӮСҮРёРәР° СҖР°РұРҫСӮР°СӮСҢ РҝРҫ СҒРёРіРҪалСғ СҒРҫ РІСӮРҫСҖРҫРіРҫ РІСӢС…РҫРҙР°. РЎСғСүРҪРҫСҒСӮСҢ РҝРҫР»РөР·РҪРҫР№ РјРҫРҙРөли РҝРҫСҸСҒРҪСҸРөСӮСҒСҸ фиг. 1 - С„СғРҪРәСҶРёРҫРҪалСҢРҪРҫР№ СҒС…РөРјРҫР№ РҝСҖРөРҙлагаРөРјРҫ- РіРҫ СғСҒСӮСҖРҫР№СҒСӮРІР°, фиг. 2 - главРҪСӢРј РІРёРҙРҫРј РұРөСҒРәРҫРҪСӮР°РәСӮРҪРҫРіРҫ РҙР°СӮСҮРёРәР° РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали. РӨСғРҪРә- СҶРёРҫРҪалСҢРҪР°СҸ СҒС…РөРјР° (фиг. 1) СҒРҫСҒСӮРҫРёСӮ РёР· РҙР°СӮСҮРёРәР° магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ 1, магРҪРёСӮР° 2, РІСӮРҫСҖРёСҮРҪРҫРіРҫ РёСҒСӮРҫСҮРҪРёРәР° РҝРёСӮР°РҪРёСҸ 3, СҒС…РөРјСӢ Р·Р°СүРёСӮСӢ, РІ СҒРҫСҒСӮавРө РәРҫСӮРҫСҖРҫР№ РёРјРөРөСӮСҒСҸ Р·Р°СүРёСӮР° РҫСӮ РҝРөСҖРөРҝРҫР»СҺСҒРҫРІРҫРә Рё РҝРҫРјРөС… РҝРҫ РұРҫСҖСӮРҫРІРҫР№ СҒРөСӮРё авСӮРҫСӮСҖР°РәСӮРҫСҖРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР° 4, Рё РҙРІСғС… РІСӢС…РҫРҙРҫРІ 6, 7, СҖазРҙРөР»РөРҪРҪСӢС… РҙРөлиСӮРөР»РөРј 5. РҹСҖРөРҙлагаРөРјРҫРө СғСҒСӮСҖРҫР№СҒСӮРІРҫ СҒРҫРҙРөСҖжиСӮ магРҪРёСӮ 2 (фиг. 2), СғСҒСӮР°РҪРҫРІР»РөРҪРҪСӢР№ СҒ РІРҫР·- РјРҫР¶РҪРҫСҒСӮСҢСҺ РҙРІРёР¶РөРҪРёСҸ РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РҪРөРҝРҫРҙРІРёР¶РҪРҫРіРҫ СҒСӮР°СӮРҫСҖР°, СҒСӮР°СӮРҫСҖ РҝСҖРөРҙСҒСӮавлСҸРөСӮ СҒРҫРұРҫР№ РҝСҖРҫРіСҖаммиСҖСғРөРјСғСҺ РёРҪСӮРөРіСҖалСҢРҪСғСҺ СҒС…РөРјСғ 15 (фиг. 2). РңагРҪРёСӮ 2 (фиг. 2) СғСҒСӮР°РҪРҫРІР»РөРҪ РІРҫ РІСӮСғР»- РәРө 10 СҒ РёР·РҫР»СҸСӮРҫСҖРҫРј 13, Р·Р°РәСҖРөРҝР»РөРҪРҪРҫР№ РҪР° СҖРҫСӮРҫСҖРө РұР»РҫРәР° РҝРөРҙали 8 (фиг. 2), РҙРІРёР¶СғСүРөРјСҒСҸ РҫСӮРҪРҫ-
- 3. BY 6533 U 2010.08.30 3 СҒРёСӮРөР»СҢРҪРҫ РҪРөРҝРҫРҙРІРёР¶РҪРҫРіРҫ СҒСӮР°СӮРҫСҖР° СҒ РҙР°СӮСҮРёРәРҫРј магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ 1 (фиг. 1) РІ РІРёРҙРө магРҪРёСӮРҪРҫ- СҖРөР·РёСҒСӮРёРІРҪРҫРіРҫ СҚР»РөРјРөРҪСӮР° 14 (фиг. 2), РІ СҶРөРҪСӮСҖРө РҪР° РҝСҖРҫРіСҖаммиСҖСғРөРјРҫР№ РёРҪСӮРөРіСҖалСҢРҪРҫР№ СҒС…РөРјРө 15 (фиг. 2) СҖР°СҒРҝРҫлагаСҺСӮСҒСҸ СҒС…РөРјР° Р·Р°СүРёСӮСӢ Рё РІСӮРҫСҖРёСҮРҪСӢР№ РёСҒСӮРҫСҮРҪРёРә РҝРёСӮР°РҪРёСҸ 3 фиг. 1, РІ СҒРҫСҒСӮавРө СҒС…РөРјСӢ Р·Р°СүРёСӮСӢ РёРјРөРөСӮСҒСҸ Р·Р°СүРёСӮР° РҫСӮ РҝРөСҖРөРҝРҫР»СҺСҒРҫРІРҫРә Рё РҝРҫРјРөС… РҝРҫ РұРҫСҖСӮРҫРІРҫР№ СҒРөСӮРё авСӮРҫСӮСҖР°РәСӮРҫСҖ- РҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР° 4 фиг. 1. РҡРҫР»РҝР°СҮРҫРә 9 (фиг. 2) СҒР»СғжиСӮ Р·Р°СүРёСӮРҫР№ РІСӮСғР»РәРё 10 (фиг. 2), РұР»РҫРәР° РҝРө- Рҙали 8 (фиг. 2), РјРөС…Р°РҪРёСҮРөСҒРәРё СҒРІСҸР·Р°РҪРҪРҫРіРҫ СҒ РҪРҫР¶РҪРҫР№ РҝРөРҙалСҢСҺ Р°РәСҒРөР»РөСҖР°СӮРҫСҖР° авСӮРҫСӮСҖР°РәСӮРҫСҖРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР°, РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫРө РҙРІРёР¶РөРҪРёРө РәРҫСӮРҫСҖРҫР№ РІСӢР·СӢРІР°РөСӮ РҫРұСҖазРҫРІР°РҪРёРө СҒРёРіРҪала, РҝСҖРҫРҝРҫСҖСҶРёРҫ- РҪалСҢРҪРҫРіРҫ РҝРөСҖРөРјРөСүРөРҪРёСҺ магРҪРёСӮР° 2 (фиг. 2), РәРҫСӮРҫСҖСӢР№ заливаРөСӮСҒСҸ или РІРәР»РөРёРІР°РөСӮСҒСҸ РІ РёР·РҫР»СҸ- СӮРҫСҖ 13 фиг. 2. РҹР°СҖаллРөР»СҢРҪРҫ лиСҶРөРІРҫР№ РҝРҫРІРөСҖС…РҪРҫСҒСӮРё РҝСҖРҫРіСҖаммиСҖСғРөРјРҫР№ РёРҪСӮРөРіСҖалСҢРҪРҫР№ СҒС…РөРјСӢ 15 (фиг. 2) СғСҒСӮР°РҪРҫРІР»РөРҪ РҙР°СӮСҮРёРә магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ 1 (фиг. 1) РІ РІРёРҙРө магРҪРёСӮРҪРҫ-СҖРөР·РёСҒСӮРёРІРҪРҫРіРҫ СҚР»РөРјРөРҪСӮР° 14 (фиг. 2) СҒРҫ РІСӮРҫСҖРёСҮРҪСӢРј РёСҒСӮРҫСҮРҪРёРәРҫРј РҝРёСӮР°РҪРёСҸ 3 (фиг. 1). Р’ СҒРҫСҒСӮавРө СҒС…РөРјСӢ Р·Р°СүРё- СӮСӢ РёРјРөРөСӮСҒСҸ Р·Р°СүРёСӮР° РҫСӮ РҝРөСҖРөРҝРҫР»СҺСҒРҫРІРҫРә Рё РҝРҫРјРөС… РҝРҫ РұРҫСҖСӮРҫРІРҫР№ СҒРөСӮРё авСӮРҫСӮСҖР°РәСӮРҫСҖРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР° 4 (фиг. 1). БлРҫРә РҝРөРҙали 8 (фиг. 2), Р·Р°РәСҖРөРҝР»РөРҪРҪСӢР№ РҪР° РІСӮСғР»РәРө 10 (фиг. 2), СғСҒСӮР°РҪавливаРөСӮСҒСҸ РІ РҪСғР»РөРІРҫРј РҝРҫР»РҫР¶РөРҪРёРё, Р·Р°СӮРөРј РҝСҖРҫРіСҖаммиСҖСғРөСӮСҒСҸ РҝСҖРҫРіСҖаммиСҖСғРөРјР°СҸ РёРҪСӮРөРіСҖалСҢРҪР°СҸ СҒС…РөРјР° 15 (фиг. 2), РҝРҫСҒР»Рө РҫРәРҫРҪСҮР°РҪРёСҸ СҒРұРҫСҖРҫСҮРҪРҫРіРҫ РҝСҖРҫСҶРөСҒСҒР° РҝСҖРҫРіСҖаммиСҖСғРөСӮСҒСҸ РІСӢС…РҫРҙРҪРҫР№ СҖазСҠРөРј (РҪР° фи- РіСғСҖах РҪРө РҝРҫРәазаРҪ), РҝРөСҖРІРҫРө РҝСҖРҫРіСҖаммиСҖРҫРІР°РҪРёРө РҝСҖРҫРёР·РІРҫРҙРёСӮСҒСҸ РҪР° РҝСҖРҫРіСҖаммиСҖСғРөРјРҫР№ РёРҪСӮРө- РіСҖалСҢРҪРҫР№ СҒС…РөРјРө 15 (фиг. 2), Р° Р·Р°СӮРөРј РҝРҫ РІСӢС…РҫРҙам 6, 7 (фиг. 1). РҹРҫРІРөСҖС… СҖРҫСӮРҫСҖРҪРҫРіРҫ Сғзла СғСҒСӮР°РҪавливаРөСӮСҒСҸ РәСҖСӢСҲРәР°-РҫРіСҖР°РҪРёСҮРёСӮРөР»СҢ 16 (фиг. 2), Р¶РөСҒСӮРәРҫ фиРәСҒРёСҖСғРөРјР°СҸ РІ РәРҫСҖРҝСғСҒРө 11 (фиг. 2), РҝРҫРІРөСҖС… СҖРҫСӮРҫСҖРҪРҫРіРҫ Сғзла. Р‘РөСҒРәРҫРҪСӮР°РәСӮРҪСӢР№ РҙР°СӮСҮРёРә РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали СҖР°РұРҫСӮР°РөСӮ СҒР»РөРҙСғСҺСүРёРј РҫРұСҖазРҫРј. РқСғР»РөРІСғСҺ СӮРҫСҮРәСғ магРҪРёСӮ 2 (фиг. 2) СҒС…РөРјР° Р·Р°РҝРҫРјРёРҪР°РөСӮ РІ Р»СҺРұРҫРј СҒР»СғСҮР°Рө. РқСғР»РөРІР°СҸ СӮРҫСҮРәР° РҝРҫ РәРҫРјР°РҪРҙРө Р·Р°- РҝРҫРјРёРҪР°РөСӮ РҝРөСҖРөРјРөСүРөРҪРёРө РұР»РҫРәР° РҝРөРҙали 8 (фиг. 2), РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РҪСғР»РөРІРҫР№ СӮРҫСҮРәРё РҝСҖРё РҝРөСҖРөРјРө- СүРөРҪРёРё РұР»РҫРәР° РҝРөРҙали 8 (фиг. 2) РёР·РјРөСҖСҸРөСӮСҒСҸ СғРіРҫР» РҝРҫРІРҫСҖРҫСӮР° РҙР°СӮСҮРёРәР° магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ 1 (фиг. 1). РҹСҖРё РёР·РјРөРҪРөРҪРёРё РҝРҫР»РҫР¶РөРҪРёСҸ РҝРҫР»СҺСҒРҫРІ магРҪРёСӮР° 2 (фиг. 2) РёР·РјРөРҪСҸСҺСӮСҒСҸ РҝР°СҖамРөСӮСҖСӢ РҙР°СӮСҮРёРәР° магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ 1 (фиг. 1) Рё СҒРҫРҫСӮРІРөСӮСҒСӮРІРөРҪРҪРҫ РҪР° РІСӢС…РҫРҙах 6, 7 (фиг. 1) РјРөРҪСҸРөСӮСҒСҸ Р·РҪР°СҮРөРҪРёРө РҪР°РҝСҖСҸР¶РөРҪРёСҸ, РәРҫСӮРҫСҖРҫРө РҝСҖРҫРҝРҫСҖСҶРёРҫРҪалСҢРҪРҫ СғРіР»Сғ РҝРҫРІРҫСҖРҫСӮР° РұР»РҫРәР° РҝРөРҙали 8 (фиг. 2) Рё, СҒРҫРҫСӮРІРөСӮ- СҒСӮРІРөРҪРҪРҫ, СғРіР»Сғ РҝРҫРІРҫСҖРҫСӮР° РҙР°СӮСҮРёРәР° магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ 1 (фиг. 1), РҝСҖРё СҚСӮРҫРј РІСӢС…РҫРҙРҪРҫР№ СҒРёРіРҪал РҪР° РІСӢС…РҫРҙРө 6 (фиг. 1) РІ РҙРІР° СҖаза РұРҫР»СҢСҲРө, СҮРөРј РҪР° РІСӢС…РҫРҙРө 7 (фиг. 1). РӯСӮРҫ РҫРұРөСҒРҝРөСҮРёРІР°РөСӮ РҙРөлиСӮРөР»СҢ 5 (фиг. 1). Р’ РёСҒС…РҫРҙРҪРҫРө РҝРҫР»РҫР¶РөРҪРёРө РұР»РҫРә РҝРөРҙали 8 (фиг. 2) РІРҫР·РІСҖР°СүР°РөСӮСҒСҸ СҒ РҝРҫРјРҫСүСҢСҺ РІСҒСӮСҖРҫ- РөРҪРҪРҫР№ РҝСҖСғжиРҪСӢ 12 (фиг. 2). РЎРёРіРҪал РІСӢРІРҫРҙРёСӮСҒСҸ РҪР° жгСғСӮ 17 (фиг. 2) Рё Р·Р°СӮРөРј РҝРөСҖРөРҙР°РөСӮСҒСҸ РҪР° СҖазСҠРөРј Рё РұР»РҫРә СғРҝСҖавлРөРҪРёСҸ РұРҫСҖСӮСҒРөСӮРё агСҖРөРіР°СӮРҫРј авСӮРҫРјРҫРұРёР»СҢРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР° (РҪР° фигСғСҖах РҪРө РҝРҫРәазаРҪ). РҹСҖРё РҪажаСӮРёРё РҪРҫР¶РҪРҫР№ РҝРөРҙали Р°РәСҒРөР»РөСҖР°СӮРҫСҖР° РұРөСҒРәРҫРҪСӮР°РәСӮРҪСӢР№ РҙР°СӮСҮРёРә РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали РҝРөСҖРөРҙР°РөСӮ РҝРҫРәазаРҪРёСҸ РҝРөСҖРөРјРөСүРөРҪРёСҸ РҝРөРҙали РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ Сғгла РҝРҫРІРҫСҖРҫСӮР° РұР»РҫРәР° РҝРөРҙали 8 (фиг. 2). РҹСҖРё РҝРөСҖРөРјРөСүРөРҪРёРё РҝРөРҙали РҝРҫРІРҫСҖР°СҮРёРІР°РөСӮСҒСҸ РҙР°СӮСҮРёРә магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ 1 (фиг. 1), Рё РІ РҪР°СҮалСҢРҪРҫРө РҝРҫР»РҫР¶РөРҪРёРө РҝРөРҙалСҢ РІРҫР·РІСҖР°СүР°РөСӮ РҝСҖСғжиРҪР° 12 (фиг. 2). ДлСҸ РёСҒРәР»СҺСҮРөРҪРёСҸ РҝРҫРІСҖРөР¶РҙРө- РҪРёСҸ СҒС…РөРјСӢ Р·Р°СүРёСӮСӢ, РҝСҖРё РҪРөРҝСҖавилСҢРҪРҫР№ РҝРҫРҙР°СҮРө РҝРёСӮР°РҪРёСҸ, РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ Р“РһРЎРў 28751-90, РІ СҒРҫСҒСӮавРө СҒС…РөРјСӢ Р·Р°СүРёСӮСӢ РёРјРөРөСӮСҒСҸ Р·Р°СүРёСӮР° РҫСӮ РҝРөСҖРөРҝРҫР»СҺСҒРҫРІРҫРә Рё РҝРҫРјРөС… РҝРҫ РұРҫСҖСӮРҫРІРҫР№ СҒРөСӮРё авСӮРҫ- СӮСҖР°РәСӮРҫСҖРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР° 4 (фиг. 1). Р‘РөСҒРәРҫРҪСӮР°РәСӮРҪСӢР№ РҙР°СӮСҮРёРә РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали РҝСҖРҫРёР·РІРҫРҙРёСӮ РҪР° РІСӢС…РҫРҙах 6, 7 (фиг. 1) РҝРҫР»РҪСӢР№ Рё РҝРҫР»РҫРІРёРҪРҪСӢР№ Р°РҪалРҫРіРҫРІСӢРө СҒРёРіРҪалСӢ, РІ СҒР»СғСҮР°Рө РҝРҫРІСӮРҫСҖРҪРҫР№ РҝРөСҖРөРҝСҖРҫРІРөСҖРәРё СҒРёРіРҪал РјРҫР¶РөСӮ РҙСғРұ- лиСҖРҫРІР°СӮСҢСҒСҸ. Р‘РөСҒРәРҫРҪСӮР°РәСӮРҪСӢР№ РҙР°СӮСҮРёРә РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали РјРҫР¶РҪРҫ СҒРҙРөлаСӮСҢ СҒ СҶРёС„СҖРҫРІСӢРј СҒРёРіРҪалРҫРј РІ РІРёРҙРө РәРҫРҙР° СҒ РёРҪСӮРөСҖС„РөР№СҒРҫРј. РҹСҖРөРҙлагаРөРјСӢР№ РұРөСҒРәРҫРҪСӮР°РәСӮРҪСӢР№ РҙР°СӮСҮРёРә РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали СғСҒСӮРҫР№СҮРёРІ Рә РІРёРұСҖР°СҶРёРё, РҫРұла- РҙР°РөСӮ СҖР°СҒСҲРёСҖРөРҪРҪСӢРјРё РёРҪСӮРөСҖС„РөР№СҒРҪСӢРјРё РІРҫР·РјРҫР¶РҪРҫСҒСӮСҸРјРё, РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢСҺ СҖР°РұРҫСӮР°СӮСҢ РҫСӮ РұРҫСҖСӮСҒРө- СӮРё, РҝРҫР»СғСҮРөРҪРёРөРј РҙРІСғС… СҒРёРіРҪалРҫРІ РҪР° РІСӢС…РҫРҙРө, РҝСҖРё СҒРұРҫСҖРәРө РҪРө СӮСҖРөРұСғРөСӮСҒСҸ РҝСҖРөРҙРІР°СҖРёСӮРөР»СҢРҪР°СҸ СғСҒСӮР°РҪРҫРІРәР° магРҪРёСӮР° РІ СӮРҫСҮРҪРҫ РҫСҖРёРөРҪСӮРёСҖРҫРІР°РҪРҪРҫРј РҝРҫР»РҫР¶РөРҪРёРё РҝРөСҖРөРҙ РҝСҖРҫРіСҖаммиСҖРҫРІР°РҪРёРөРј. РқалиСҮРёРө РІ РұРөСҒРәРҫРҪСӮР°РәСӮРҪРҫРј РҙР°СӮСҮРёРәРө РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали РІСҒСӮСҖРҫРөРҪРҪРҫР№ СҒС…РөРјСӢ Р·Р°СүРёСӮСӢ РҫСӮ РҝРөСҖРө-
- 4. BY 6533 U 2010.08.30 4 РҝРҫР»СҺСҒРҫРІРҫРә Рё РҝРҫРјРөС… РҝРҫ РұРҫСҖСӮРҫРІРҫР№ СҒРөСӮРё авСӮРҫСӮСҖР°РәСӮРҫСҖРҪРҫРіРҫ СҒСҖРөРҙСҒСӮРІР° СҖР°СҒСҲРёСҖСҸРөСӮ РөРіРҫ С„СғРҪРәСҶРёРҫ- РҪалСҢРҪСӢРө РІРҫР·РјРҫР¶РҪРҫСҒСӮРё. РўР°РәРёРј РҫРұСҖазРҫРј, РҙР°РҪРҪРҫРө СғСҒСӮСҖРҫР№СҒСӮРІРҫ РҫРұлаРҙР°РөСӮ СғРҝСҖРҫСүРөРҪРҪРҫР№ РәРҫРҪСҒСӮСҖСғРәСҶРёРөР№ Рё СӮРөС…РҪРҫР»РҫРіРёРөР№ СҒРұРҫСҖРәРё Рё РјРҫРҪСӮажа, РұРҫР»РөРө СӮРҫСҮРҪСӢРј РёР·РјРөСҖРөРҪРёРөРј, РёРјРөРөСӮ РҝСҖРҫСҒСӮСғСҺ Рё РҙРөСҲРөРІСғСҺ СҒС…РөРјСғ СҒРұРҫСҖРәРё, СӮРҫ РөСҒСӮСҢ РҙР°РҪРҪРҫРө СғСҒСӮСҖРҫР№СҒСӮРІРҫ РҝСҖРёРјРөРҪРёРјРҫ. РҹСҖРөРҙлагаРөРјСӢР№ РұРөСҒРәРҫРҪСӮР°РәСӮРҪСӢР№ РҙР°СӮСҮРёРә РҝРҫР»РҫР¶РөРҪРёСҸ РҝРө- Рҙали СғР¶Рө РјРҫР¶РөСӮ РұСӢСӮСҢ РҫСҒРІРҫРөРҪ РҝСҖРҫРјСӢСҲР»РөРҪРҪРҫСҒСӮСҢСҺ РІ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ. Р—Р°СҸРІРёСӮРөР»РөРј РёР·РіРҫСӮРҫРІ- Р»РөРҪР° РҫРҝСӢСӮРҪР°СҸ РҝР°СҖСӮРёСҸ РұРөСҒРәРҫРҪСӮР°РәСӮРҪСӢС… РҙР°СӮСҮРёРәРҫРІ РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали. РҹСҖРҫРІРөРҙРөРҪРҪСӢРө СҒСӮРөРҪРҙРҫРІСӢРө РёСҒРҝСӢСӮР°РҪРёСҸ Рё РёСҒРҝСӢСӮР°РҪРёСҸ РІ СғСҒР»РҫРІРёСҸС… СҚРәСҒРҝР»СғР°СӮР°СҶРёРё РҝРҫРәазали РҪР°РҙРөР¶РҪРҫСҒСӮСҢ РұРөСҒРәРҫРҪСӮР°РәСӮРҪСӢС… РҙР°СӮСҮРёРәРҫРІ РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали РҝРҫ СҒСҖавРҪРөРҪРёСҺ СҒ Р°РҪалРҫРіРёСҮРҪСӢРјРё СғСҒСӮСҖРҫР№СҒСӮвами, РҝСҖРёРјРөРҪСҸРөРјСӢРјРё РІ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ. РҹСҖРёРҪСҸСӮРҫ СҖРөСҲРөРҪРёРө Рҫ СҒРөСҖРёР№РҪРҫРј РҝСҖРҫРёР·РІРҫРҙСҒСӮРІРө СғРәазаРҪРҪСӢС… РұРөСҒРәРҫРҪСӮР°РәСӮРҪСӢС… РҙР°СӮСҮРёРәРҫРІ РҝРҫР»РҫР¶РөРҪРёСҸ РҝРөРҙали. РӨРёРі. 2 РқР°СҶРёРҫРҪалСҢРҪСӢР№ СҶРөРҪСӮСҖ РёРҪСӮРөллРөРәСӮСғалСҢРҪРҫР№ СҒРҫРұСҒСӮРІРөРҪРҪРҫСҒСӮРё. 220034, Рі. РңРёРҪСҒРә, СғР». РҡРҫР·Р»РҫРІР°, 20.