

















































More Related Content
Similar to Upload a presentation to download RESEARCH OBJECTIVES (20)
More from MdSazibMollik (20)


















Recently uploaded (20)



















Upload a presentation to download RESEARCH OBJECTIVES
- 2. Design and Fabrication of Autonomous Road Painting Vehicle Northern University Bangladesh Our Project On 2
- 3. SUPERVISED BY DR. MD. SAZIB MOLLIK SENIOR LECTURER SCIENCE AND ENGINEERING NORTHERN UNIVERSITY BANGLADESH 3 Project Tittle : Design and Fabrication of Autonomous Road Painting Vehicle Submitted By Md Rakib Howlader ID : 44200302231 Md. Sadikur Rahman ID : 44200302230 Al Mamun Sarker ID : 44200302266 Md Hosne Mobarak Khandaker ID : 44200302256 Md Asiqur Rahman ID : 44200302261
- 4. Outline ’é¦ Introduction. ’é¦ Objective. ’é¦ Methodology. ’é¦ Block Diagram - Work of IOT Technology. ’é¦ Block Diagram Of Project. ’é¦ Equipment list. ’é¦ Circuit Diagram. ’é¦ Project Picture. 4 ’é¦ Result. ’é¦ Applications. ’é¦ Discussion. ’é¦ Conclusion. ’é¦ Future Work.
- 5. Introduction Traditional road painting methods are labor-intensive, time-consuming, and often expose workers to hazardous conditions. The Autonomous Road Painting Vehicle offers a sustainable solution for maintaining road infrastructure with improved efficiency, safety, and cost-effectiveness. Its integration into existing road maintenance processes can lead to enhanced road safety, reduced maintenance costs, and improved overall road network quality, ultimately benefiting communities and transportation systems worldwide. 5
- 6. Objective 6 The main objective of this project is to Autonomous Road Painting Vehicle for The main purpose is to create a smart robot so that we can take many benefits from one project. ’üČ To vital for maintaining clear and consistent road markings, which are essential for road safety and efficient traffic flow. ’üČ To minimize the exposure of human workers to potentially hazardous roadwork environments. ’üČ enhances operational flexibility, allowing operators to manage the robot from a safe distance ’üČ to provide a user-friendly interface, typically accessible through mobile apps or web dashboards
- 7. ’é¦ Define the project objectives and requirements, including the type of road markings, robot specifications, and performance criteria. ’é¦ Create a conceptual design of the road marking robot, considering factors like size, mobility, paint dispensing mechanism, and sensor suite. ’é¦ Select the necessary components, including Arduino board, Bluetooth module, motors, sensors (e.g., ultrasonic), wheels, paint dispensing system, and power source (e.g., Li-Po battery). ’é¦ Design the physical structure of the robot, including the chassis, mounting for sensors, wheels, and paint dispensing mechanism. ’é¦ Wire the selected components together, ensuring proper connections, voltage regulation, and power distribution. ’é¦ Develop the software for the Arduino board, implementing control algorithms for navigation, Bluetooth communication, obstacle avoidance, and paint dispensing. ’é¦ Test the robot's individual components and subsystems to ensure they work as expected. 7 Methodology
- 8. Block Diagram Of Project 8
- 9. Equipment list 9 ’é¦ Arduino UNO ’é¦ Bluetooth Module. ’é¦ L298N Motor Driver Module. ’é¦ Relay Module. ’é¦ Battery. ’é¦ Pump. ’é¦ Buck Module. ’é¦ Ultrasonic Sensor ’é¦ Servo Motor
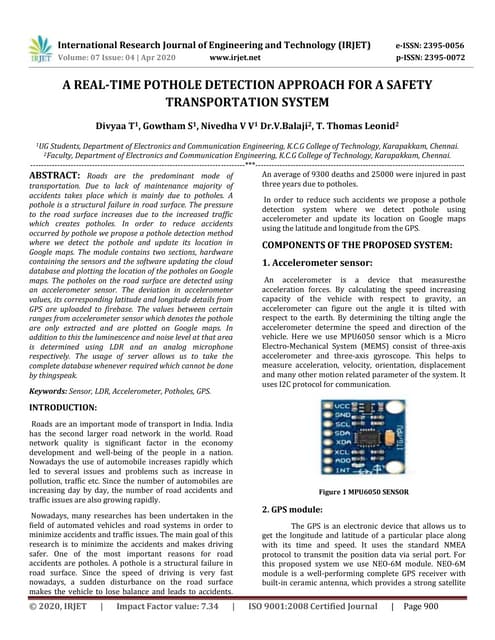
- 10. Components 10 Arduino UNO Bluetooth Module HC-05 Battery LM2596 Relay L298N
- 12. Main Controller Arduino Uno ’é¦ Arduino Uno is open source hardware and microcontroller ’é¦ board which is based on A Tmega328P Processor. ’é¦ It has 14 digital input/output and 6 analog input pins and operates at 5 volts and 16 MHz quartz crystal frequency. ’é¦ It has 32 KB flash memory, 2 Kb SRAM and 1 KB EEPROM. 12
- 15. Result After launch our project, connect phone Bluetooth to hc05 and send data using control App. We also Monitor robot Front View and back view. 15
- 16. Applications 16 ŌĆó Road Marking and Maintenance. ŌĆó Construction and Infrastructure. ŌĆó Parking Lot Marking. ŌĆó Airport Runway and Taxiway Marking ŌĆó Factory and Warehouse Floor Marking. ŌĆó Smart Cities
- 17. Discussion The Arduino Bluetooth-controlled road marking robot represents a significant advancement in road maintenance and infrastructure management. This innovative solution harnesses the power of Arduino technology and Bluetooth connectivity to automate the precise application of road markings. It offers numerous advantages, including enhanced safety by reducing human exposure to hazardous roadwork environments, cost savings through efficient material usage and labor reduction, and adaptability to various road types and conditions. Moreover, the real-time monitoring capabilities provided by Esp32-CAM control ensure operational oversight and immediate issue resolution. 17
- 18. Conclusion ’üĄ The robot's precise road marking capabilities enhance road safety and organization while reducing the margin for human error. ’üĄ Bluetooth connectivity allows for remote operation and monitoring, enhancing operator safety and control flexibility. ’üĄ Automation reduces labor costs, optimizes material usage, and minimizes the need for road closures, resulting in potential cost savings. 18
- 19. Future Work ’üČ The future of Arduino Bluetooth-controlled road marking robots holds exciting possibilities. Advancements in wireless communication technologies may address range limitations. Integration with artificial intelligence and machine learning could make the robots more adaptable to changing road conditions. Moreover, incorporating environmental sensors could enable robots to assess road surface conditions and apply appropriate treatments. 19 17
- 20. Any Question? 20
- 21. 21