LiDAR feature extraction
3 likes1,344 views

The document discusses feature extraction from lidar data, including road extraction and roadside feature extraction. It outlines algorithms for extracting road edges with over 90% accuracy, and detecting poles, trees, and other roadside features in a fully automated manner. Ongoing work focuses on improving pole extraction and developing classifiers for different feature types like signs and light posts.










































































![Adaptive Hyper-Parameter Tuning for Black-box LiDAR Odometry [IROS2021]](https://cdn.slidesharecdn.com/ss_thumbnails/iros2021presentation-231115084931-6d8bec3e-thumbnail.jpg?width=560&fit=bounds)


















More Related Content
Similar to LiDAR feature extraction (20)
More from Conor Mc Elhinney (6)




Recently uploaded (20)




















LiDAR feature extraction
- 1. Feature ExtractionConor Mc ElhinneyMonday 14th February 2011
- 4. Roadside feature extraction
- 5. SummaryOutline Feature extraction
- 7. Roadside feature extraction
- 8. SummaryFeature ExtractionOur goals with feature extraction to date have been: fully automated algorithms
- 9. high accuracy ( > 90%)
- 10. easy verification / validation in software (manual)
- 11. quantitative accuracy assesmentOutline Feature extraction
- 12. Road extraction
- 13. Roadside feature extraction
- 14. SummaryRoad ExtractionOur goals with the road extraction module are: automated road edge estimation
- 15. automated road edge error removal / processing
- 16. automated road surface extractionOur goals with the road extraction module are: automated road edge estimation
- 17. automated road edge error removal / processing
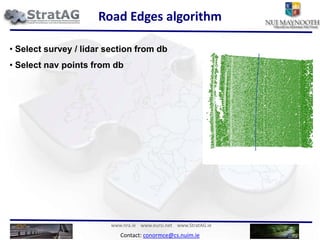
- 18. automated road surface extractionRoad Edges algorithm Select survey / lidar section from db Road Edges algorithm Select survey / lidar section from db
- 19. Select nav points from db Road Edges algorithm Select survey / lidar section from db
- 20. Select nav points from db
- 21. Select those nav points separated by a specific interval1m
- 22. Road Edges algorithm Select survey / lidar section from db
- 23. Select nav points from db
- 24. Select those nav points separated by a specific interval
- 25. Can create cross sections orthogonal to these nav points and the vans heading1m
- 26. Road Edges algorithm Select survey / lidar section from db
- 27. Select nav points from db
- 28. Select those nav points separated by a specific interval
- 29. Can create cross sections orthogonal to these nav points and the vans heading
- 30. Take a cross section1m
- 31. Road Edges algorithm Select survey / lidar section from db
- 32. Select nav points from db
- 33. Select those nav points separated by a specific interval
- 34. Can create cross sections orthogonal to these nav points and the vans heading
- 35. Take a cross section
- 36. Find edge based on slopeRoad Edges algorithm Select survey / lidar section from db
- 37. Select nav points from db
- 38. Select those nav points separated by a specific interval
- 39. Can create cross sections orthogonal to these nav points and the vans heading
- 40. Take a cross section
- 41. Find edge based on slope
- 42. Refine based on pulse width and amplitudeRoad Edges algorithm Select survey / lidar section from db
- 43. Select nav points from db
- 44. Select those nav points separated by a specific interval
- 45. Can create cross sections orthogonal to these nav points and the vans heading
- 46. Take a cross section
- 47. Find edge based on slope
- 48. Refine based on pulse width and amplitude
- 49. Return edgesRoad Edges algorithm Select survey / lidar section from db
- 50. Select nav points from db
- 51. Select those nav points separated by a specific interval
- 52. Can create cross sections orthogonal to these nav points and the vans heading
- 53. Take a cross section
- 54. Find edge based on slope
- 55. Refine based on pulse width and amplitude
- 56. Return edgesIterate for all nav points
- 57. Road Edges algorithm Select survey / lidar section from db
- 58. Select nav points from db
- 59. Select those nav points separated by a specific interval
- 60. Can create cross sections orthogonal to these nav points and the vans heading
- 61. Take a cross section
- 62. Find edge based on slope
- 63. Refine based on pulse width and amplitude
- 64. Return edgesIterate for all nav points
- 65. Road Edges algorithm Select survey / lidar section from db
- 66. Select nav points from db
- 67. Select those nav points separated by a specific interval
- 68. Can create cross sections orthogonal to these nav points and the vans heading
- 69. Take a cross section
- 70. Find edge based on slope
- 71. Refine based on pulse width and amplitude
- 72. Return edgesIterate for all nav points
- 73. Road Edges ®C 30k test We tested the algorithm on data from the a628 in the UK. It was fully automated with the same input parameters.
- 74. Regional road containing 2-3 lanes.Road Edges ®C 30k test We tested the algorithm on data from the a628 in the UK. It was fully automated with the same input parameters.
- 75. Regional road containing 2-3 lanes.
- 76. Left edge in results is excellent
- 77. Right edge is quite good.
- 78. lower density
- 79. more obstructions (cars / islands)
- 80. requires post-processingRoad Edges - results
- 81. Road Edges ®C 300m straight
- 82. Road Edges ®C 300m straight
- 83. Road Edges ®C Bend
- 84. Road Edges ®C Bend
- 85. Road Edges ®C layby
- 86. Road Edges ®C layby
- 87. Road Edges ®C Roundabout
- 88. Road Edges ®C Roundabout
- 89. Road Edges ®C Multilane with layby
- 90. Road Edges ®C Multilane with layby
- 91. Road Edges ®C Right Edge not perfect
- 92. Road Edges ®C Right Edge not perfect
- 93. Road Surface
- 94. Road Surface
- 95. Road Surface
- 96. Road Surface
- 97. Ongoing work Edge error processing
- 98. Need to integrate error processing of right edge into the algorithm.
- 99. Accuracy assessment of edges
- 100. Quantitative assessment of road edge algorithms doesn°Øt exist. We intend to develop a line comparison based approach as point based comparison involves too much error.
- 101. °∞Automatic breakline detection from airborne laser range data°±- Br®πgelmann 2000Outline Feature extraction
- 102. Road extraction
- 103. Roadside feature extraction
- 104. SummaryRoadside FeaturesOur goals with the road side features extraction are: Initially cluster LiDAR data on roadside
- 105. Automate pole extraction
- 106. Automate tree extraction
- 107. Determine viability of this approach to other roadside features.
- 108. Accuracy assessmentOur goals with the road side features extraction are: Initially cluster LiDAR data on roadside
- 109. Automate pole extraction
- 110. Automate tree extraction
- 111. Determine viability of this approach to other roadside features.
- 112. Accuracy assessmentRoadside features algorithmITC Select survey / lidar section from db
- 113. Take a cross section (50m x 20m)Roadside features algorithmITC Select survey / lidar section from db
- 114. Take a cross section (50m x 20m)
- 115. Cluster data using region growingRoadside features algorithmITC Select survey / lidar section from db
- 116. Take a cross section (50m x 20m)
- 117. Cluster data using region growing
- 118. Remove °∞ground°± regionRoadside features algorithmITC Select survey / lidar section from db
- 119. Take a cross section (50m x 20m)
- 120. Cluster data using region growing
- 122. Process segments into grouped objectsRoadside features algorithmITC Select survey / lidar section from db
- 123. Take a cross section (50m x 20m)
- 124. Cluster data using region growing
- 126. Process segments into grouped objectsIterate for all cross sections in survey
- 127. Pole extraction algorithm Identify Pole-like structures
- 128. Separate Pole-like ObjectsPole extraction examples ®C±Ùæ±≤µ≥Û≥Ÿ≤ı Taking our previous example we then apply pole extraction to the individual processed cross sectionPole extraction examples ®C±Ùæ±≤µ≥Û≥Ÿ≤ı
- 129. Pole extraction examples ®C±Ùæ±≤µ≥Û≥Ÿ≤ı
- 130. Pole extraction examples ®C≤ıæ±≤µ≤‘±Ë¥«≤ı≥Ÿ
- 131. Pole extraction examples ®C≤ıæ±≤µ≤‘±Ë¥«≤ı≥Ÿ
- 132. Pole extraction examples ®CTelegraph pole
- 133. Pole extraction examples ®CTelegraph pole
- 134. Pole extraction examples ®CSigns with two pole bases
- 135. Pole extraction examples ®CSigns with two pole bases
- 136. Trees extraction We have refined ITC°Øs algorithm to try and increase pole detection.
- 137. Their original tree detection we have found was quite constrained and requires more work to make it generally applicableTrees extraction We have refined ITC°Øs algorithm to try and increase pole detection.
- 138. Their original tree detection we have found was quite constrained and requires more work to make it generally applicableTrees extraction
- 139. Other features ®CFences / walls/ barriersThere are a number of other roadside features that we have been keeping track of.
- 140. The initial classification of roadside objects works very well.
- 141. We need to develop new extractors/detectors for linear features like walls/fences and so on.
- 142. The initial results of the object finder are very promisingOther features ®CFences / walls/ barriersThere are a number of other roadside features that we have been keeping track of.
- 143. The initial classification of roadside objects works very well.
- 144. We need to develop new extractors/detectors for linear features like walls/fences and so on.
- 145. The initial results of the object finder are very promisingWall
- 146. Other features ®CFences / walls/ barriersCrash barrier
- 147. Other features ®CFences / walls/ barriersFence
- 148. Other features ®CFences / walls/ barriers
- 149. Other features ®CFences / walls/ barriersWall
- 150. Other features ®CFences / walls/ barriersCrash barrier
- 151. Other features ®CFences / walls/ barriersFence
- 154. Ongoing work We need to continue work on the pole extraction to overcome the problems that we have identified in the 30k test.
- 155. Once this is complete we can work on pole classification, i.e differentiate between signs, lightposts, telegraph poles....
- 156. Future feature detection -> trees, walls, fences, barriers.Outline Feature extraction
- 157. Road extraction
- 158. Roadside feature extraction
- 159. SummarySummaryWe have a system for the automated selection of LiDAR data based on geospatial queries.This allows for the easy automation of processing algorithms.The system allows for the easy manual review of algorithms performance.