
![NAVIGATING
COMPLEXITY
MAZE-SOLVING ROBOT
BATCH NO:04
NAME
1. R B KAILASH C
2. ROHITH
3. SUDAHVA V A B
4. VIKAS A RAM
1JS21RA013
1JS21RA015
1JS21RA018
1JS21RA023
GUIDE: K S MAHESH
[ASSISTANT PROF]
23 JULY 2024
TUESDAY](https://image.slidesharecdn.com/mazerunner-241128100048-d2ab5d9e/85/MAZE-RUNNER-and-the-best-of-u-to-do-the-needful-2-320.jpg)


![TITLE AUTHOR WORKING
FIELD
SUMMARY
Design and Implementation of
Autonomous Maze-Solving
Robot based on an Enhanced
Maze Solving Techniques
R Ramesh; D Selvalakshmi; M
Naven Karthick; S L
Nikileshkumar; S Cibivarshan; K
Prasanth
IEEE This article discusses a self-governing robot that uses
distance sensors and wheel pivot encoders to navigate
and solve mazes by storing past information and
following the shortest path.
Maze Solving Robot-B-Eng
Design Project [2016]
Mohamed Mohamed-Ahmed Department of
Electronic and
Electrical
Engineering
The details the development of two autonomous
robots for maze navigation, using microcontrollers,
sensors, wireless communication, and data loggers.
An Autonomous Maze-
Solving Robotic System Based
on an Enhanced Wall-Follower
Approach
Shatha Alamri ,Hadeel
Alamri ,Wejdan Alshehri ,Shuruq
Alshehri ,Ahad Alaklabi and Tareq
Alhmiedat
College of
Computer
Sciences and
Information, King
Saud University,
Riyadh 11421,
Saudi Arabia
Reviewing the recently developed wall-follower
maze-solving robotic systems. Designing and
implementing a maze-solving robotic system by
employing a modified wall-follower method.](https://image.slidesharecdn.com/mazerunner-241128100048-d2ab5d9e/85/MAZE-RUNNER-and-the-best-of-u-to-do-the-needful-5-320.jpg)





































More Related Content
Similar to MAZE RUNNER and the best of u to do the needful (20)
Recently uploaded (20)


















MAZE RUNNER and the best of u to do the needful
- 2. NAVIGATING COMPLEXITY MAZE-SOLVING ROBOT BATCH NO:04 NAME 1. R B KAILASH C 2. ROHITH 3. SUDAHVA V A B 4. VIKAS A RAM 1JS21RA013 1JS21RA015 1JS21RA018 1JS21RA023 GUIDE: K S MAHESH [ASSISTANT PROF] 23 JULY 2024 TUESDAY
- 3. INTRODUCTION This project develops an autonomous robot that navigates mazes using sensors to detect obstacles and an algorithm to find the shortest path to the exit. Equipped with infrared and ultrasonic sensors, a microcontroller, and motors, the robot demonstrates efficient maze- solving capabilities. Potential applications include search and rescue missions, automated delivery systems, and robotic pathfinding. OVERVIEW ’üČ Develop an autonomous robot capable of navigating through a maze and finding the shortest path to the exit ’üČ Implement algorithms to efficiently explore the maze and determine the optimal route, such as the A* algorithm ’üČ Explore potential real-world applications of maze-solving robots including search and rescue missions, automated delivery systems, and robotic pathfinding OBJECTIVES AND GOALS
- 4. PROBLEM STATEMENT Search and Rescue ŌĆó Urban environments: Navigating through collapsed buildings or disaster zones to locate survivors. ŌĆó Underground environments: Exploring caves or mines for trapped individuals. Exploration and Mapping ŌĆó Uncharted territories: Mapping unknown environments like caves, forests, or underwater terrains. ŌĆó Planetary exploration: Sending robots to explore other planets or moons. Logistics and Warehousing ŌĆó Inventory management: Optimizing warehouse layouts and locating items efficiently. ŌĆó Autonomous delivery: Navigating through complex indoor environments to deliver packages.
- 5. TITLE AUTHOR WORKING FIELD SUMMARY Design and Implementation of Autonomous Maze-Solving Robot based on an Enhanced Maze Solving Techniques R Ramesh; D Selvalakshmi; M Naven Karthick; S L Nikileshkumar; S Cibivarshan; K Prasanth IEEE This article discusses a self-governing robot that uses distance sensors and wheel pivot encoders to navigate and solve mazes by storing past information and following the shortest path. Maze Solving Robot-B-Eng Design Project [2016] Mohamed Mohamed-Ahmed Department of Electronic and Electrical Engineering The details the development of two autonomous robots for maze navigation, using microcontrollers, sensors, wireless communication, and data loggers. An Autonomous Maze- Solving Robotic System Based on an Enhanced Wall-Follower Approach Shatha Alamri ,Hadeel Alamri ,Wejdan Alshehri ,Shuruq Alshehri ,Ahad Alaklabi and Tareq Alhmiedat College of Computer Sciences and Information, King Saud University, Riyadh 11421, Saudi Arabia Reviewing the recently developed wall-follower maze-solving robotic systems. Designing and implementing a maze-solving robotic system by employing a modified wall-follower method.
- 6. METHODOLOGY ALGORITHM SELECTION: - WALL FOLLOWING: SIMPLE BUT NOT ALWAYS OPTIMAL. - DEPTH-FIRST SEARCH (DFS): EXPLORES EACH BRANCH DEEPLY BEFORE BACKTRACKING. - BREADTH-FIRST SEARCH (BFS): EXPLORES ALL NEIGHBORS AT THE PRESENT DEPTH PRIOR TO MOVING ON TO NODES AT THE NEXT DEPTH LEVEL. - FLOOD-FILL: COMMON IN MICRO MOUSE COMPETITIONS, FILLING THE MAZE WITH DISTANCE VALUES FROM THE ENDPOINT AND FOLLOWING THE SHORTEST PATH. EQUIPMENT: ŌĆó AURDINO UNO ŌĆó L298N MOTOR DRIVER ŌĆó 2* N20 MINI MOTOR ŌĆó 2* ULTRASONIC SENSOR ŌĆó 3* IR SENSORS ŌĆó LI-PO BATTERY(12V) ŌĆó JUMPER CABLES ŌĆó CHASSI ŌĆó ESP32 WIFI MODULE ŌĆó BREAD BOARD
- 7. DESIGN ŌĆó Understand how maze solving robots work by referring to previous research papers. ŌĆó Understand A* algorithm and figure out a way to use it to solve maze. ŌĆó Develop a code for finding the shortest path to solve the maze using A* algorithm in with the help of Code Composer Studio . ŌĆó Making a 6ŌĆÖ * 6ŌĆÖ maze to test the robot.
- 8. Li-ON 3D PLA Printing Filament 1.75mm for 3D Printers- Smooth Printing material with Wide Color Option (1 kg Spool) (Red) FABRICATION AND MANUFACTURING Design and Planning: Determine maze type, robot dimensions, sensor/actuator selection, microcontroller, and power source. Component Procurement: Gather necessary materials for the robot's structure, electronics, and power supply. Assembly: Construct the robot's chassis, mount sensors and actuators, and create the electronic circuitry. Software Development: Create algorithms for maze solving, sensor data processing, and motor control. Testing and Refinement: Test the robot's performance in different mazes, calibrate sensors, and optimize performance. MANUFACTURING A MAZE SOLVING ROBOT
- 9. TESTING AND VALIDATION A* Algorithm in 5 Steps: ŌĆó Initialization: Create open and closed sets. Add the start node to the open set with its initial cost. ŌĆó Node Selection: Choose the node in the open set with the lowest combined cost (actual cost + estimated cost to goal). ŌĆó Goal Check: If the selected node is the goal, return the path. Otherwise, move it to the closed set. ŌĆó Neighbour Exploration: Evaluate each neighbour of the current node. If a neighbour is in the closed set, ignore it. If it's not in the open set, add it with its calculated cost. If it's already in the open set, update its cost if a shorter path is found. ŌĆó Iteration: Repeat steps 2-4 until the goal is reached or the open set is empty (indicating no path).
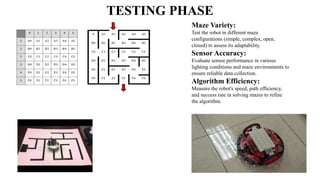
- 10. TESTING PHASE Maze Variety: Test the robot in different maze configurations (simple, complex, open, closed) to assess its adaptability. Sensor Accuracy: Evaluate sensor performance in various lighting conditions and maze environments to ensure reliable data collection. Algorithm Efficiency: Measure the robot's speed, path efficiency, and success rate in solving mazes to refine the algorithm.
- 11. RESULTS AND ANALYSIS ŌĆó Wheel Imperfection: The robot's wheels experienced resistance issues, causing it to deviate from a straight path, necessitating modifications to the A* algorithm. ŌĆó Bump Sensor Solution: The integration of bump sensors effectively detected walls and obstacles, playing a crucial role in the robot's maze-solving capabilities. ŌĆó Algorithm Adaptation: Due to wheel inconsistencies, modifications were made to the A* algorithm to compensate for the robot's imperfect movement, ensuring successful maze navigation.
- 12. CONCLUSION AI Application: The project successfully demonstrated the application of artificial intelligence for maze-solving, highlighting its potential for future advancements. Project Challenges: Implementing the project required adaptations to the original plan due to unfamiliarity with the learning kit. Performance and Future Scope: While achieving success, the robot's navigation and obstacle avoidance capabilities can be further enhanced. Potential Impact: Maze-solving robots represent a promising field with anticipated growth and development in the coming years. AI and Future: The project's outcome suggests that AI could play a significant role in future technological advancements.
- 13. FUTURE WORK Future Work and Possibilities for Maze Solving Robots: ŌĆó Advanced Algorithms: Explore more sophisticated algorithms like Deep Q-Learning for complex maze environments and real-time decision making. ŌĆó Sensor Fusion: Combine multiple sensors (lidar, camera, ultrasonic, etc.) for enhanced perception and mapping capabilities. ŌĆó Dynamic Maze Environments: Develop robots capable of adapting to changing maze conditions, such as moving obstacles or walls. ŌĆó Real-World Applications: Apply maze-solving technology to practical applications like search and rescue, warehouse automation, and exploration. ŌĆó Autonomous Learning: Implement machine learning techniques for robots to learn and improve their maze-solving abilities through experience.