







2018 global ai_bootcamp_seoul_HomeNavi(Reinforcement Learning, AI)
- 1. Global AI Bootcamp Seoul 3D Environment HomeNavi Language, Vision & Action ???(Paul Kim)
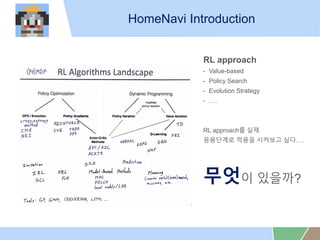
- 2. HomeNavi Introduction RL approach - Value-based - Policy Search - Evolution Strategy - ˇ. RL approach? ?? ????? ??? ???? ??ˇ. ??? ????
- 3. Motivated paper Target-driven Visual Navigation Model using Deep Reinforcement Learning(Y Zhu, 2016) ??? ??!!
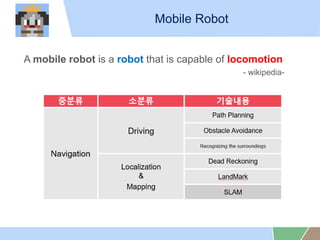
- 4. Mobile Robot A mobile robot is a robot that is capable of locomotion - wikipedia-
- 5. Mobile Robot A mobile robot is a robot that is capable of locomotion - wikipedia- ?, ??? Model-base? ?? RL???? ??? ??? ?????!!!
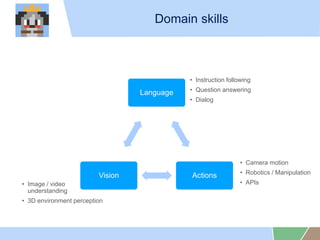
- 6. Domain skills ? Camera motion ? Robotics / Manipulation ? APIs Language ActionsVision ? Image / video understanding ? 3D environment perception ? Instruction following ? Question answering ? Dialog
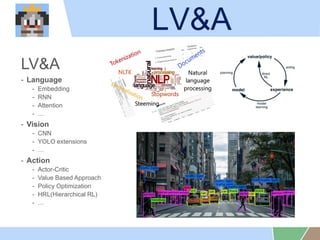
- 7. LV&A LV&A - Language - Embedding - RNN - Attention - ˇ - Vision - CNN - YOLO extensions - ˇ - Action - Actor-Critic - Value Based Approach - Policy Optimization - HRL(Hierarchical RL) - ˇ
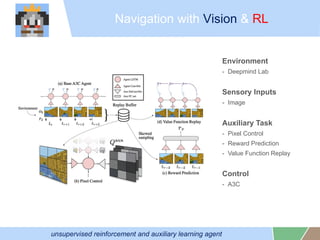
- 10. Navigation with Vision & RL unsupervised reinforcement and auxiliary learning agent Environment - Deepmind Lab Sensory Inputs - Image Auxiliary Task - Pixel Control - Reward Prediction - Value Function Replay Control - A3C
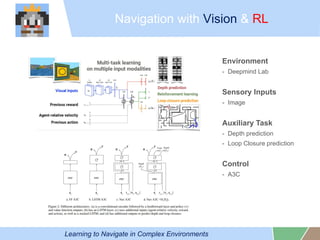
- 11. Navigation with Vision & RL Learning to Navigate in Complex Environments Environment - Deepmind Lab Sensory Inputs - Image Auxiliary Task - Depth prediction - Loop Closure prediction Control - A3C
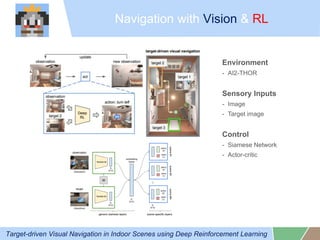
- 12. Navigation with Vision & RL Target-driven Visual Navigation in Indoor Scenes using Deep Reinforcement Learning Environment - AI2-THOR Sensory Inputs - Image - Target image Control - Siamese Network - Actor-critic
- 13. Navigation with Vision & RL ???? ??? ?? ??? ?? ??? ?? ??? ? ?ˇ
- 14. Navigation with Vision & RL Example reinforcement learning with unsupervised auxiliary tasks(M Jaderberg et al, 2016) ??? ??!!
- 15. Navigation with Vision & RL Example reinforcement learning with unsupervised auxiliary tasks(M Jaderberg et al, 2016) ???? ?? ??? ??? ?? ???ˇ
- 16. Navigation with Vision & RL Example reinforcement learning with unsupervised auxiliary tasks(M Jaderberg et al, 2016) Vision based
- 17. What is Language Grounding? ?? Vision??? ????? ??? ???? Agent? ???? Language? ??? ? ?? ??? ???ˇ
- 18. What is Language Grounding? Pick up a cup Go to the bedroom Empty the trash can Go to the kitchen Wash dishes ˇ ˇ
- 19. Multi-Modality Representation Language??? Vision??? ??? ?? ???? ???? ?? ??? ? ??? ??!
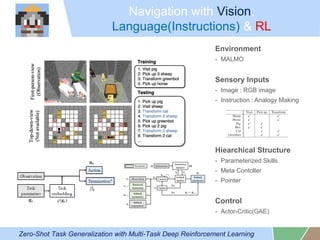
- 20. Navigation with Vision, Language(Instructions) & RL Zero-Shot Task Generalization with Multi-Task Deep Reinforcement Learning Environment - MALMO Sensory Inputs - Image : RGB image - Instruction : Analogy Making Hiearchical Structure - Parameterized Skills - Meta Contoller - Pointer Control - Actor-Critic(GAE)
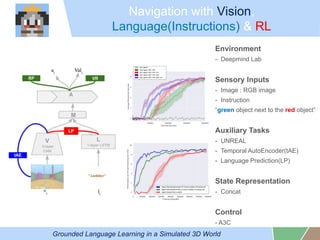
- 21. Navigation with Vision, Language(Instructions) & RL Grounded Language Learning in a Simulated 3D World Environment - Deepmind Lab Sensory Inputs - Image : RGB image - Instruction ˇ°green object next to the red objectˇ± Auxiliary Tasks - UNREAL - Temporal AutoEncoder(tAE) - Language Prediction(LP) State Representation - Concat Control - A3C
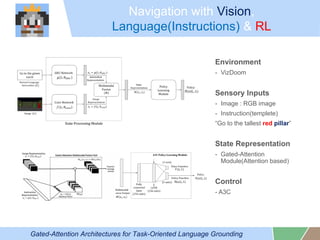
- 22. Navigation with Vision, Language(Instructions) & RL Gated-Attention Architectures for Task-Oriented Language Grounding Environment - VizDoom Sensory Inputs - Image : RGB image - Instruction(templete) ˇ°Go to the tallest red pillarˇ± State Representation - Gated-Attention Module(Attention based) Control - A3C
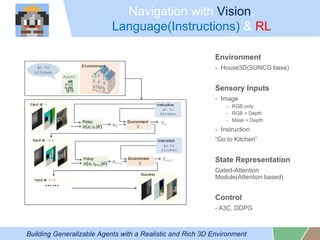
- 23. Navigation with Vision, Language(Instructions) & RL Building Generalizable Agents with a Realistic and Rich 3D Environment Environment - House3D(SUNCG base) Sensory Inputs - Image - RGB only - RGB + Depth - Mask + Depth - Instruction ˇ°Go to Kitchenˇ± State Representation Gated-Attention Module(Attention based) Control - A3C, DDPG
- 24. Navigation with Vision, Language(Instructions) & RL ????? Language? ??? Agent? ???? ?? ??? ? ??ˇ
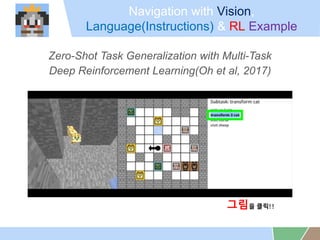
- 25. Navigation with Vision, Language(Instructions) & RL Example Zero-Shot Task Generalization with Multi-Task Deep Reinforcement Learning(Oh et al, 2017) ??? ??!!
- 26. Navigation with Vision, Language(Instructions) & RL Example Zero-Shot Task Generalization with Multi-Task Deep Reinforcement Learning(Oh et al, 2017) ????? ?? ???? ??? ????ˇ
- 27. Navigation with Vision, Language(Instructions) & RL Example Zero-Shot Task Generalization with Multi-Task Deep Reinforcement Learning(Oh et al, 2017) Vision Language based
- 28. Question Answering ???? Agent? Language? ???? ?? ?? ??? ?? ???? ??? ??? ??? ???ˇ
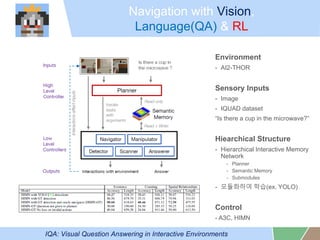
- 31. Navigation with Vision, Language(QA) & RL IQA: Visual Question Answering in Interactive Environments Environment - AI2-THOR Sensory Inputs - Image - IQUAD dataset ˇ°Is there a cup in the microwave?ˇ± Hiearchical Structure - Hierarchical Interactive Memory Network - Planner - Semantic Memory - Submodules - ????? ??(ex. YOLO) Control - A3C, HIMN
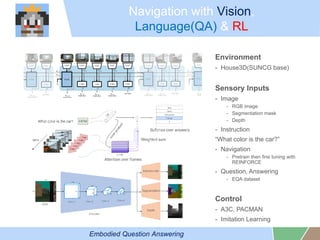
- 32. Navigation with Vision, Language(QA) & RL Embodied Question Answering Environment - House3D(SUNCG base) Sensory Inputs - Image - RGB image - Segmentation mask - Depth - Instruction ˇ°What color is the car?ˇ± - Navigation - Pretrain then fine tuning with REINFORCE - Question, Answering - EQA dataset Control - A3C, PACMAN - Imitation Learning
- 33. Navigation with Vision, Language(QA) & RL ?? ????? Question Answering ? ???? agent? ???? ?? ??? ? ?ˇ
- 34. Navigation with Vision, Language(QA) & RL Example IQA: Visual Question Answering in Interactive Environments(D Gordon et al, 2017) ??? ??!!
- 35. Navigation with Vision, Language(QA) & RL Example IQA: Visual Question Answering in Interactive Environments(D Gordon et al, 2017) Question Answering? ??? ???? ?? ??? ?? ???ˇ
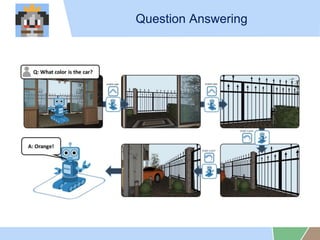
- 36. Navigation with Vision, Language(QA) & RL Example IQA: Visual Question Answering in Interactive Environments(D Gordon et al, 2017) Vision Language(QA) based
- 37. RL Korea HomaNavi ??? RL_Korea HomeNavi???? ? ????? ?????? ?? ??, ??? ??? ?? ??ˇ.. ?? ????!!! ????? ??? ?? ??? ????? (?? ?? ??ˇ???? ??) Reinforcement Learning Korea
- 38. RL Korea & Modulabs Reinforcement Learning Korea ??? ??? LV&A Lab
- 39. Lab ??ˇ ??? ??? LV&A Lab ??? ?????.. ????