More Related Content Similar to Giới thiệu avr (20)
C6. Timer Module.pdfdsdsd dsdd sdsd sdds sd C6. Timer Module.pdfdsdsd dsdd sdsd sdds sd
HongVit873092 Ã˝
"T√¢y Ti·∫øn" l√Ý b√Ýi th∆° vi·∫øt v·ªÅ binh ƒëo√Ýn T√¢y Ti·∫øn n∆°i nh√Ý th∆° ƒë√£ t·ª´ng s·ªëng v√Ý chi·∫øn ƒë·∫•u. Nh·ªØng ng∆∞·ªùi l√≠nh trong binh ƒëo√Ýn ph·∫ßn ƒë√¥ng l√Ý thanh ni√™n H√Ý N·ªôi, chi·∫øn ƒë·∫•u trong ho√Ýn c·∫£nh gian kh·ªï, v√¥ c√πng thi·∫øu th·ªën v·ªÅ m·ªçi m·∫∑t nh∆∞ng v·∫´n ph∆°i ph·ªõi tinh th·∫ßn l√£ng m·∫°n anh h√πng. ·ªû h·ªç c√≥ v·∫ª ƒë·∫πp tinh ngh·ªãch h√Ýo hoa c·ªßa ch√Ýng trai ƒë·∫•t H√Ý th√Ýnh nh∆∞ng c≈©ng th·∫≠t ki√™u h√πng, can ƒë·∫£m trong cu·ªôc chi·∫øn ƒë·∫•u. Mi√™u t·∫£ v·ªÅ h·ªç, Quang D≈©ng s·ª≠ d·ª•ng b√∫t ph√°p l√£ng m·∫°n v√Ý c·∫£m h·ª©ng ng·ª£i ca khi·∫øn cho d√π tr·∫£i qua ƒëau th∆∞∆°ng, gian kh·ªï th√¨ ng∆∞·ªùi l√≠nh v·∫´n hi·ªán l√™n mang v·∫ª ƒë·∫πp th·∫≠t ƒë·∫∑c bi·ªát: bi tr√°ng m√Ý kh√¥ng h·ªÅ bi l·ª•y.
M·ªü b√Ýi V·∫ª ƒë·∫πp bi tr√°ng c·ªßa h√¨nh t∆∞·ª£ng ng∆∞·ªùi l√≠nh trong b√Ýi th∆° T√¢y Ti·∫øn 2
‚ÄúT√¢y Ti·∫øn‚Äù l√Ý m·ªôt b√Ýi th∆° ti√™u bi·ªÉu c·ªßa Quang D≈©ng, l√Ý th√Ýnh t·ª±u c·ªßa th∆° ca kh√°ng chi·∫øn ch·ªëng Ph√°p, l√Ý m·ªôt trong nh·ªØng b√Ýi th∆° hay nh·∫•t vi·∫øt v·ªÅ ng∆∞·ªùi l√≠nh. Tr·∫ßn L√™ VƒÉn ƒë√£ t·ª´ng c√≥ nh·ªØng nh√¢n x√©t nh∆∞: ‚ÄúTr∆∞·ªõc ‚ÄúT√¢y Ti·∫øn‚Äù, Quang D≈©ng ƒë√£ c√≥ nh·ªØng kh√∫c d·∫°o ƒë√Ýn kh√° hay nh∆∞ng th·∫≠t s·ª± ch·ªâ ƒë·∫øn ‚ÄúT√¢y Ti·∫øn‚Äù Quang D≈©ng m·ªõi th·ª±c s·ª± tr√¨nh l√Ýng m·ªôt phong c√°ch th∆°, m·ªôt di·ªán m·∫°o th∆°‚Äù. ƒê√≥ l√Ý m·ªôt phong c√°ch h·ªìn h·∫≠u, h√Ýo hoa. Kh√¥ng nh·ªØng th·∫ø qua b√Ýi th∆° ‚ÄúT√¢y Ti·∫øn‚Äù ta th·∫•y ƒë∆∞·ª£c v·∫ª ƒë·∫πp bi tr√°ng c·ªßa nh·ªØng anh h√πng T√¢y Ti·∫øn.
ADVERTISING
M·ªü b√Ýi V·∫ª ƒë·∫πp bi tr√°ng c·ªßa h√¨nh t∆∞·ª£ng ng∆∞·ªùi l√≠nh trong b√Ýi th∆° T√¢y Ti·∫øn 3
Trong th·ªùi k√¨ ƒë·∫•u tranh ch·ªëng gi·∫∑c c·ª©u n∆∞·ªõc, ng∆∞·ªùi l√≠nh tr·ªü th√Ýnh m·ªôt h√¨nh t∆∞·ª£ng trung t√¢m ƒë∆∞·ª£c nhi·ªÅu ngh·ªá sƒ© ƒëi v√Ýo khai th√°c, th·ªÉ hi·ªán. ‚ÄúT√¢y Ti·∫øn‚Äù c·ªßa Quang D≈©ng c≈©ng l√Ý m·ªôt trong s·ªë nh·ªØng s√°ng t√°c nh∆∞ th·∫ø. T√°c ph·∫©m ƒë√£ th·ª±c s·ª± th√Ýnh c√¥ng khi ƒëi v√Ýo kh·∫Øc h·ªça h√¨nh ·∫£nh ng∆∞·ªùi l√≠nh T√¢y Ti·∫øn trong th·ªùi k√¨ kh√°ng chi·∫øn ch·ªëng Ph√°p trong ƒë√≥ c√≥ v·∫ª ƒë·∫πp bi tr√°ng l√Ý v·∫ª ƒë·∫πp n·ªïi b·∫≠t ƒë·ªÉ l·∫°i trong ng∆∞·ªùi ƒë·ªçc nhi·ªÅu x√∫c c·∫£m.
M·ªü b√Ýi V·∫ª ƒë·∫πp bi tr√°ng c·ªßa h√¨nh t∆∞·ª£ng ng∆∞·ªùi l√≠nh trong b√Ýi th∆° T√¢y Ti·∫øn 4
B√Ýi th∆° ‚ÄúT√¢y Ti·∫øn‚Äù l√Ý m·ªôt trong nh·ªØng t√°c ph·∫©m ti√™u bi·ªÉu c·ªßa nh√Ý th∆° Quang D≈©ng. ƒêo√Ýn qu√¢n T√¢y Ti·∫øn ƒëa ph·∫ßn l√Ý nh·ªØng thanh ni√™n H√Ý N·ªôi, ph·∫£i chi·∫øn ƒë·∫•u trong ho√Ýn c·∫£nh gian kh·ªï, thi·∫øu th·ªën v·ªÅ m·ªçi th·ª© nh∆∞ng v·∫´n y√™u ƒë·ªùi. ·ªû nh·ªØng ng∆∞·ªùi l√≠nh T√¢y Ti·∫øn h·ªç mang m·ªôt v·∫ª ƒë·∫πp tinh ngh·ªãch, h√Ýo hoa nh∆∞ng c≈©ng th·∫≠t anh h√πng, ki√™n c∆∞·ªùng cho cu·ªôc chi·∫øn. Qua ng√≤i b√∫t c·ªßa Quang D≈©ng nh·ªØng ng∆∞·ªùi l√≠nh ·∫•y hi·ªán l√™n mang v·∫ª ƒë·∫πp bi tr√°ng nh∆∞ng kh√¥ng h·ªÅ bi l·ª•y.
M·ªü b√Ýi V·∫ª ƒë·∫πp bi tr√°ng c·ªßa h√¨nh t∆∞·ª£ng ng∆∞·ªùi l√≠nh trong b√Ýi th∆° T√¢y Ti·∫øn 5
Trong v√¥ v√Ýn h·ªëi h·∫£ v√Ý th√∫c gi·ª•c, ng∆∞·ªùi ta khao kh√°t t√¨m ƒë·∫øn m·ªôt b·∫øn b·ªù b√¨nh y√™n. ƒêi·ªÅu t∆∞·ªüng ch·ª´ng ƒë∆°n gi·∫£n m√Ý b·∫°n ch·∫≥ng th·ªÉ t√¨m ƒë·∫øn trong cu·ªôc s·ªëng hi·ªán ƒë·∫°i x√¥ b·ªì. V√Ý vƒÉn ch∆∞∆°ng nh∆∞ m·ªôt ƒëi·ªÅu di·ªáu k√¨ m√Ý cu·ªôc s·ªëng ƒëem ƒë·∫øn v√Ý cho ta kho·∫£ng l·∫∑ng c·ªßa t√¢m h·ªìn. T·ª´ng c√¢u ch·ªØ l√Ým con tim rung ƒë·ªông, l√Ým t√¢m h·ªìn ta r·ªông m·ªü. Ch·∫≥ng ph·∫£i nh·ªØng d·ªØ d·ªôi s√¥i n·ªïi, b√¨nh y√™n v√Ý d·ªãu nh·∫π nh∆∞ v·∫≠y m√Ý v·∫ßn th∆° c·ªßa Quang D≈©ng ƒë√£ d·∫ßn len l·ªèi trong t√¢m tr√≠ ta t·ª± bao gi·ªù. Kh√∫c t√¨nh th∆° ‚ÄúT√¢y Ti·∫øn‚Äù anh h√πng v·ªõi ng∆∞·ªùi l√≠nh T√¢y Ti·∫øn mang v·∫ª ƒë·∫πp bi tr√°ng ƒë·ªÉ l·∫°i trong ta bao k·ªâ ni·ªám. afe "T√¢y Ti·∫øn" l√Ý b√Ýi th∆° vi·∫øt v·ªÅ binh ƒëo√Ýn T√¢y Ti·∫øn n∆°i nh√Ý th∆° ƒë√£ t·ª´ng s·ªëng v√Ý cdsd
1. TR∆Ø·ªúNG ƒê·∫ÝI H·ªåC TH√ÄNH ƒê√î
KHOA CNKT ĐIỆN TỬ - VIỄN THÔNG
BÁO CÁO BÀI TẬP LỚN
ƒê·ªÅ t√Ýi:
NGẮT VÀ TIMER TRONG AVR
Giảng viên
Sinh viên thực hiện
12/16/2013
: Th.s Đặng Văn Hiếu
: Nguyễn Chí Cường
: Nguyễn Thị Huệ
: Phan Thị Ngọc Anh
: Đỗ Văn Đang
: Phạm Thái Vũ
KỸ THUẬT VI ĐIỀU KHIỂN
: Ho√Ýng VƒÉn An
1
2. MỤC ĐÍCH ĐỀ TÀI
1
2
Hiểu về họ vi
điều khiển nổi
ti·∫øng l√Ý AVR
12/16/2013
Hiểu khái niệm
ng·∫Øt v√Ý timer
KỸ THUẬT VI ĐIỀU KHIỂN
2
3. NỘI DUNG BÁO CÁO
TỔNG QUAN ATMEGA 16
1
2
3
12/16/2013
NGẮT VÀ TIMER
ỨNG DỤNG THỰC TẾ
KỸ THUẬT VI ĐIỀU KHIỂN
3
7. NGẮT VÀ TIMER
L√Ý qu√° tr√¨nh d·ª´ng ch∆∞∆°ng tr√¨nh ch√≠nh
đang chạy để ưu tiên thực hiện một
ch∆∞∆°ng tr√¨nh kh√°c, ch∆∞∆°ng tr√¨nh n√Ýy
ƒë∆∞·ª£c g·ªçi l√Ý ch∆∞∆°ng tr√¨nh ph·ª•c v·ª• ng·∫Øt
(ISR –Interrupt Service Routine).
Sau khi kết thúc nhiệm vụ trong isr, bộ
đếm chương trình sẽ được trả về giá trị
trước đó để bộ xử lí quay về thực hiện
tiếp các nhiệm vụ còn dang dở.
12/16/2013
KỸ THUẬT VI ĐIỀU KHIỂN
7
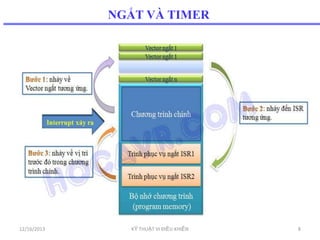
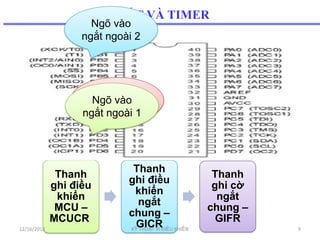
9. NGẮT VÀ TIMER
Ng√µ v√Ýo
ng·∫Øt ngo√Ýi 2
Ng√µ v√Ýo
Ng√µ v√Ýo
ng·∫Øt ngo√Ýi 0
ng·∫Øt ngo√Ýi 1
Thanh
ghi điều
khiển
MCU –
MCUCR
12/16/2013
Thanh
ghi điều
khiển
ngắt
chung –
GICR
KỸ THUẬT VI ĐIỀU KHIỂN
Thanh
ghi c·ªù
ngắt
chung –
GIFR
9
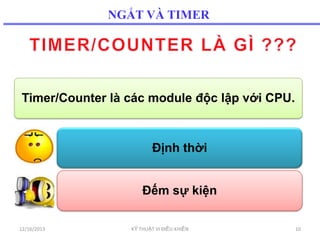
10. NGẮT VÀ TIMER
Timer/Counter l√Ý c√°c module ƒë·ªôc l·∫≠p v·ªõi CPU.
Định thời
Đếm sự kiện
12/16/2013
KỸ THUẬT VI ĐIỀU KHIỂN
10
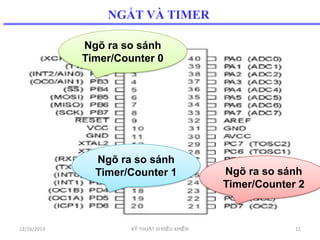
11. NGẮT VÀ TIMER
Ngõ ra so sánh
Timer/Counter 0
Ngõ ra so sánh
Timer/Counter 1
12/16/2013
KỸ THUẬT VI ĐIỀU KHIỂN
Ngõ ra so sánh
Timer/Counter 2
11
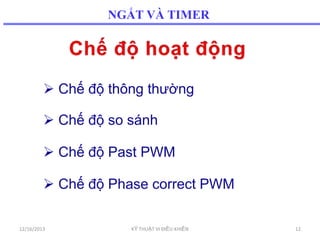
12. NGẮT VÀ TIMER
 Chế độ thông thường
 Chế độ so sánh
 Chế độ Past PWM
 Chế độ Phase correct PWM
12/16/2013
KỸ THUẬT VI ĐIỀU KHIỂN
12
14. ỨNG DỤNG THỰC TẾ
ÔÉò
ÔÉò
ÔÉò
ÔÉò
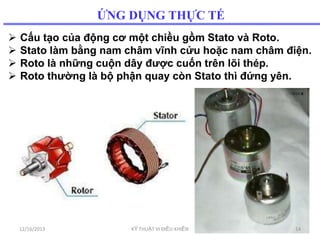
C·∫•u t·∫°o c·ªßa ƒë·ªông c∆° m·ªôt chi·ªÅu g·ªìm Stato v√Ý Roto.
Stato l√Ým b·∫±ng nam ch√¢m vƒ©nh c·ª≠u ho·∫∑c nam ch√¢m ƒëi·ªán.
Roto l√Ý nh·ªØng cu·ªôn d√¢y ƒë∆∞·ª£c cu·ªën tr√™n l√µi th√©p.
Roto th∆∞·ªùng l√Ý b·ªô ph·∫≠n quay c√≤n Stato th√¨ ƒë·ª©ng y√™n.
12/16/2013
KỸ THUẬT VI ĐIỀU KHIỂN
14
15. ỨNG DỤNG THỰC TẾ
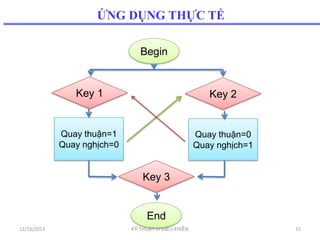
Begin
Key 1
Key 2
Quay thu·∫≠n=1
Quay nghịch=0
Quay thu·∫≠n=0
Quay nghịch=1
Key 3
End
12/16/2013
KỸ THUẬT VI ĐIỀU KHIỂN
15
18. Cảm ơn sự chú ý lắng nghe!
12/16/2013
KỸ THUẬT VI ĐIỀU KHIỂN
18
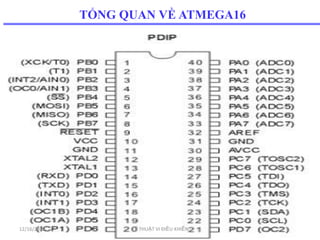
Editor's Notes #3: Ki·∫øn tr√∫c vi ƒëi·ªÅu khi·ªÉn: ƒë·∫≠p m·∫°nh m·ªôt c√°i v√Ýo con vi ƒëi·ªÅu khi·ªÉn, m·ªü ru·ªôt n√≥ ra xem coi n√≥ c√≥ c√°i g√¨ trong ƒë√≥, th·∫•y n√≥ ƒëen thui, ch·∫≥ng c√≥ g√¨Th·ª±c ra vi ƒëi·ªÅu khi·ªÉn c≈©ng l√Ý m·ªôt c·∫•u tr√∫c si√™u nh·ªè, g·ªìm c√°c linh ki·ªán ƒëi·ªÉn t·ª≠ ·ªü k√≠ch th∆∞·ªõc micro ho·∫∑c nano, c√°c linh ki·ªán n√Ýy ƒë∆∞·ª£c k·∫øt h·ª£p v·ªõi nhau v√Ý ƒë∆∞·ª£c n·ªëi v·ªõi c√°c thi·∫øt b·ªã b√™n ngo√Ýi qua c√°c ch√¢n vi ƒëi·ªÅu khi·ªÉn.Ch√≠nh v√¨ v·∫≠y, hi·ªÉu r√µ ƒë∆∞·ª£c ki·∫øn tr√∫c vi ƒëi·ªÅu khi·ªÉn, c√°c b·∫°n s·∫Ω hi·ªÉu r√µ ƒë∆∞·ª£c m√¨nh ƒëang l√Ým vi·ªác v·ªõi c√°i g√¨, v√Ý c√°i ƒë√≥ l√Ým vi·ªác nh∆∞ th·∫ø n√Ýo.c√≥ 3 h·ªç vi ƒëi·ªÅu khi·ªÉn n·ªïi ti·∫øng l√Ý 8051 (bao g·ªìm AVR), PIC v√Ý Motorola. ki·∫øn tr√∫c vi ƒëi·ªÅu khi·ªÉn ph·ªï bi·∫øn hi·ªán nay, l√Ý ki·∫øn tr√∫c Von Neumann v√Ý ki·∫øn tr√∫c Harvard. Ã˝#6: - T·ªïng quan AVR AVR l√Ý h·ªç vi ƒëi·ªÅu khi·ªÉn 8 bit theo c√¥ng ngh·ªá m·ªõi, v·ªõi nh·ªØng t√≠nh nƒÉng r·∫•t m·∫°nh ƒë∆∞·ª£c t√≠ch h·ª£p trong chip c·ªßa h√£ng Atmel theo c√¥ng ngh·ªá RISC, n√≥ m·∫°nh ngang h√Ýng v·ªõi c√°c h·ªç vi ƒëi·ªÅu khi·ªÉn 8 bit kh√°c nh∆∞ PIC, Pisoc. Do ra ƒë·ªùi mu·ªôn h∆°n n√™n h·ªç vi ƒëi·ªÅu khi·ªÉn AVR c√≥ nhi·ªÅu t√≠nh nƒÉng m·ªõi ƒë√°p ·ª©ng t·ªëi ƒëa nhu c·∫ßu c·ªßa ng∆∞·ªùi s·ª≠ d·ª•ng, so v·ªõi h·ªç 8051 89xx s·∫Ω c√≥ ƒë·ªô ·ªïn ƒë·ªãnh, kh·∫£ nƒÉng t√≠ch h·ª£p, s·ª± m·ªÅm d·∫ªo trong vi·ªác l·∫≠p tr√¨nh v√Ý r·∫•t ti·ªán l·ª£i. Ã˝Ã˝Ã˝Ã˝Ã˝ T·∫°i sao AVR:Ã˝so v·ªõi c√°c chip vi ƒëi·ªÅu khi·ªÉn 8 bits kh√°c, AVR c√≥ nhi·ªÅu ƒë·∫∑c t√≠nh h∆°n h·∫≥n, h∆°n c·∫£ trong t√≠nh ·ª©ng d·ª•ng (d·ªÖ s·ª≠ d·ª•ng) v√Ý ƒë·∫∑c bi·ªát l√Ý v·ªÅ ch·ª©c nƒÉng:G·∫ßn nh∆∞ ch√∫ng ta kh√¥ng c·∫ßn m·∫Øc th√™m b·∫•t k·ª≥ linh ki·ªán ph·ª• n√Ýo khi s·ª≠ d·ª•ng AVR,Ã˝Thi·∫øt b·ªã l·∫≠p tr√¨nh (m·∫°ch n·∫°p) cho AVR r·∫•t ƒë∆°n gi·∫£n, Atmelga16 c√≥ ƒë·∫ßy ƒë·ªß t√≠nhnƒÉng c·ªßa h·ªç AVR, v√Ý gi√° th√Ýnh so v·ªõi c√°c lo·∫°i kh√°c th√¨ gi√° th√Ýnh l√Ý v·ª´a ph·∫£i khi nghi√™n c·ª©u v√Ý l√Ým c√°c c√¥ng vi·ªác ·ª©g d·ª•ng t·ªõi vi ƒëi·ªÅu khi·ªÉn.- T√≠nh nƒÉng: - 16K byte trong h·ªá th·ªëng flash kh·∫£ tr√¨nh c√≥ th·ªÉ n·∫°p v√Ý x√≥a 1000 l·∫ßn. 512 byte EEPROM c√≥ th·ªÉ ghi v√Ý x√≥a 100.000 l·∫ßn. 1 K (SRAM). - ƒê√≥ng v·ªè 40 ch√¢n, trong ƒë√≥ c√≥ 32 ch√¢n v√Ýo ra d·ªØ li·ªáu chia l√Ým 4 PORT A,B,C,D. C√°c ch√¢n n√Ýy ƒë·ªÅu c√≥ ch·∫ø ƒë·ªô pull_up resistors. - Giao ti·∫øp SPI. - Giao di·ªán I2C. - C√≥ 8 k√™nh ADC 10 bit. - 4 k√™nh PWM. - 1 b·ªô so s√°nh analog. - 2 b·ªô timer/counter 8 bit, 1 b√¥ timer/counter1 16 bit. - 1 b·ªô ƒë·ªãnh th·ªùi Watchdog. - 1 b·ªô truy·ªÅn nh·∫≠n USART l·∫≠p tr√¨nh ƒë∆∞·ª£c.C·∫•u tr√∫c l·ªánh ƒë∆°n gi·∫£n, th·ªùi gian th·ª±c thi l·ªánh nh∆∞ nhau.130 l·ªánh th·ª±c thi trong v√≤ng 1 chu k√¨ chip.B·ªô nh·ªõ ch∆∞∆°ng tr√¨nh v√Ý d·ªØ li·ªáu kh√¥ng bay h∆°i.T√≠nh nƒÉng ngo·∫°i vi.2 b·ªô timers/counters 8 b√≠t v·ªõi c√°c ch·∫ø ƒë·ªô ƒë·∫øm ri√™ng r·∫Ω v√Ý ki·ªÉu so s√°nh.1 b·ªô timer/counter 16 bit v·ªõi c√°c ch·∫ø ƒë·ªô ƒë·∫øm ri√™ng r·∫Ω, ki·ªÉu so s√°nh v√Ý ki·ªÉu b·∫Øt s·ª± ki·ªán.B·ªô ƒë·∫øm th·ªùi gian th·ª±c v·ªõi m√°y t√≠nh dao ƒë·ªông ri√™ng r·∫Ω.4 k√™nh bƒÉm xung PWM.8 k√™nh ADC 10 bit.Byte ƒë·ªãnh h∆∞·ªõng 2 ƒë∆∞·ªùng giao ti·∫øp n·ªëi ti·∫øp.Giao ti·∫øp USART n·ªëi ti·∫øp kh·∫£ tr√¨nh.Giao ti·∫øp SPI n·ªëi ti·∫øp ch·ªß/t·ªõ.B·ªô ƒë·ªãnh th·ªùi kh·∫£ tr√¨nh gi√°m s√°t xung nh·ªãp c·ªßa 1 chip 1 c√°ch ri√™ng r·∫Ω. T√≠ch h·ª£p b·ªô so s√°nh t√≠n hi·ªáu t∆∞∆°ng t·ª±.Giao ti·∫øp JTAG.C√°c t√≠nh nƒÉng ƒë·∫∑c bi·ªát c·ªßa vi ƒëi·ªÅu khi·ªÉn.C√°c ng·∫Øt trong v√Ý ngo√Ýi.6 ch·∫ø ƒë·ªô ngh·ªâ: r·∫£nh r·ªói, gi·∫£m nhi·ªÖu ADC, ti·∫øt ki·ªám nƒÉng l∆∞·ª£ng, ngu·ªìn th·∫•p, Standby v√Ý Extended Stanby.ƒêi·ªán √°p s·ª≠ d·ª•ng.4,5 ‚Äì 5,5V d√πng v·ªõi Atmega16.T·ªëc ƒë·ªô xung nh·ªãp d√πng cho chip.0 ‚Äì 16 Mhz cho Atmega16.AT90S1200ATtiny15ATmega16ATmega32#8: Ch∆∞∆°ng tr√¨nh ƒëi c√πng v·ªõi ng·∫Øt ƒë∆∞·ª£c g·ªçi l√Ý tr√¨nh d·ªãch v·ª• ng·∫Øt ISR (Interrupt Service Routine) hay c√≤n g·ªçi l√Ý tr√¨nh qu·∫£n l√Ω ng·∫Øt (Interrupt handler).C√°c t√≠n hi·ªáu d·∫´n ƒë·∫øn ng·∫Øt c√≥ th·ªÉ xu·∫•t ph√°t t·ª´ :1.Thi·∫øt b·ªã b√™n trong chip (ng·∫Øt b√°o b·ªô ƒë·∫øm timer/counter tr√Ýn, ng·∫Øt b√°o qu√° tr√¨nh g·ªüi d·ªØ li·ªáu b·∫±ng RS232 k·∫øt th√∫c‚Ķ) .2. C√°c t√°c nh√¢n b√™n ngo√Ýi (ng·∫Øt b√°o c√≥ 1 button ƒë∆∞·ª£c nh·∫•n, ng·∫Øt b√°o c√≥ 1 g√≥i d·ªØ li·ªáu ƒë√£ ƒë∆∞·ª£c nh·∫≠n3‚Ķ#9: H√¨nhÃ˝1 minh h·ªça c√°ch t·ªï ch·ª©c ng·∫Øt th√¥ng th∆∞·ªùng trong c√°c chip AVR. S·ªë l∆∞·ª£ng ng·∫Øt tr√™n m·ªói d√≤ng chip l√Ý kh√°c nhau, ·ª©ng v·ªõi m·ªói ng·∫Øt s·∫Ω c√≥ vector ng·∫Øt, vector ng·∫Øt l√Ý c√°c thanh ghi c√≥ ƒë·ªãa ch·ªâ c·ªë ƒë·ªãnh ƒë∆∞·ª£c ƒë·ªãnh nghƒ©a tr∆∞·ªõc n·∫±m trong ph·∫ßn ƒë·∫ßu c·ªßa b·ªô nh·ªõ ch∆∞∆°ng tr√¨nh.Ã˝Khi th·ª±c hi·ªán l·ªánh g·ªçi ng·∫Øt, CPU s·∫Ω t√¨m ki·∫øm trong b·∫£ng vector ng·∫Øt ƒë·ªãa ch·ªâ c·ªßa ch∆∞∆°ng tr√¨nh ph·ª•c v·ª• ng·∫Øt. #10: Ng·∫Øt ngo√Ýi l√Ý c√°ch r·∫•t hi·ªáu qu·∫£ ƒë·ªÉ th·ª±c hi·ªán giao ti·∫øp gi·ªØa ng∆∞·ªùi d√πng v√Ý chip.( gi·ªõi thi·ªáu c√°c ch√¢n)At16 c√≥ c√°c thanh ghiThanh ghi ƒëi·ªÅu khi·ªÉn MCU ‚Äì MCUCRÃ˝(MCU Control Register) l√Ý thanh ghi x√°c l·∫≠p ch·∫ø ƒë·ªô ng·∫Øt cho ng·∫Øt ngo√Ýi,Thanh ghi ƒëi·ªÅu khi·ªÉn MCU ‚Äì MCUCR thanh ghi n√Ýy c√≥ t√™n l√Ý thanh ghi m·∫∑t n·∫° ng·∫Øt th√¥ng th∆∞·ªùng GIMSK,#11: Ã˝Ã˝Ã˝Timer/Counter l√Ý c√°c module ƒë·ªôc l·∫≠p v·ªõi CPU. Ch·ª©c nƒÉng ch√≠nh c·ªßa c√°c b·ªô Timer/Counter, nh∆∞ t√™n g·ªçi c·ªßa ch√∫ng, l√Ý ƒë·ªãnh th·ªùi (t·∫°o ra m·ªôt kho·∫£ng th·ªùi gian, ƒë·∫øm th·ªùi gian‚Ķ) v√Ý ƒë·∫øm s·ª± ki·ªán.Ã˝ Tr√™n c√°c chip AVR, c√°c b·ªô Timer/Counter c√≤n c√≥ th√™m ch·ª©c nƒÉng t·∫°o ra c√°c xung ƒëi·ªÅu r·ªông PWM (Pulse Width Modulation), ·ªü m·ªôt s·ªë d√≤ng AVR, m·ªôt s·ªë Timer/Counter c√≤n ƒë∆∞·ª£c d√πng nh∆∞ c√°c b·ªô canh ch·ªânh th·ªùi gian (calibration) trong c√°c ·ª©ng d·ª•ng th·ªùi gian th·ª±c. #12: T/C0:L√Ý m·ªôt b·ªô ƒë·ªãnh th·ªùi, ƒë·∫øm ƒë∆°n gi·∫£n v·ªõi 8 bit. G·ªçi l√Ý ƒë∆°n gi·∫£n v√¨ b·ªô n√Ýy ch·ªâ c√≥ 1 ch·∫ø ƒë·ªô ho·∫°t ƒë·ªông (mode) so v·ªõi 5 ch·∫ø ƒë·ªô c·ªßa b·ªô Timer/Counter1. Ch·∫ø ƒë·ªô hoat ƒë·ªông c·ªßa Timer/Counter0 th·ª±c ch·∫•t c√≥ th·ªÉ coi nh∆∞ 2 ch·∫ø ƒë·ªô nh·ªè (v√Ý c≈©ng l√Ý 2 ch·ª©c nƒÉng c∆° b·∫£n) ƒë√≥ l√Ý t·∫°o ra m·ªôt kho·∫£ng th·ªùi gian v√Ý ƒë·∫øm s·ª± ki·ªán.C√°c ch·ª©c nƒÉng ch√≠nh: K√™nh ƒë·∫øm so s√°nh ƒë∆°n.X√≥a gi√° tr·ªã timer khi ƒë·∫°t t·ªõi gi√° tr·ªã so s√°nh.Ch·∫ø ƒë·ªô PWM.ƒê·∫øm s·ª± ki·ªán b√™n ngo√Ýi.B·ªô chia t·∫ßn s·ªë 10 bit.Ng·∫Øt khi tr√Ýn ho·∫∑c t·∫°i gi√° tr·ªã so s√°nh.C√°c ch·∫ø ƒë·ªô ho·∫°t ƒë·ªông c·ªßa T/C0:Ch·∫ø ƒë·ªô b√¨nh th∆∞·ªùng. Ch·∫ø ƒë·ªô x√≥a gi√° tr·ªã Timer khi ƒë·∫°t t·ªõi gi√° tr·ªã so s√°nh. Ch·∫ø ƒë·ªô Fash PWM. Ch·∫ø ƒë·ªô PWM.T/C1:L√Ý b·ªô ƒë·ªãnh th·ªùi, ƒë·∫øm ƒëa nƒÉng 16 bit. B·ªô Timer/Counter n√Ýy c√≥ 5 ch·∫ø ƒë·ªô ho·∫°t ƒë·ªông ch√≠nh. Ngo√Ýi c√°c ch·ª©c nƒÉng th√¥ng th∆∞·ªùng, Timer/Counter1 c√≤n ƒë∆∞·ª£c d√πng ƒë·ªÉ t·∫°o ra xung ƒëi·ªÅu r·ªông PWM d√πng cho c√°c m·ª•c ƒë√≠ch ƒëi·ªÅu khi·ªÉn. C√≥ th·ªÉ t·∫°o 2 t√≠n hi·ªáu PWMÃ˝ ƒë·ªôc l·∫≠p tr√™n c√°c ch√¢n OC1A (ch√¢n 15) v√Ý OC1B (ch√¢n 16) b·∫±ng Timer/Counter1. C√°c b·ªô Timer/Counter ki·ªÉu n√Ýy ƒë∆∞·ª£c t√≠ch h·ª£p th√™m kh√° nhi·ªÅu trong c√°c chip AVR sau n√Ýy, v√≠ d·ª• Atmega128 c√≥ 2 b·ªô, Atmega2561 c√≥ 4 b·ªô‚ĶC√°c ch·ª©c nƒÉng ch√≠nh:2 b·ªô so s√°nh ng√µ ra ƒë·ªôc l·∫≠p. 1 b·ªô b·∫Øt m·∫´u t·ª´ ng√µ v√Ýo. 1 b·ªô gi·∫£m nhi·ªÖu ng√µ v√Ýo.Ch·∫ø ƒë·ªô x√≥a timer khi ƒë·∫°t t·ªõi gi√° tr·ªã so s√°nh.T·∫°o t·∫ßn s·ªë. T·∫°o xung PWM c√≥ th·ªÉ thay ƒë·ªïi gi√° tr·ªã.ƒê·∫øm s·ª± ki·ªán ngo√Ýi.4 ngu·ªìn ng·∫Øt ƒë·ªôc l·∫≠p.C√°c ch·∫ø ƒë·ªô ho·∫°t ƒë·ªông: (gi·ªëng T/C0)T/C2:Tuy l√Ý m·ªôt module 8 bit nh∆∞ Timer/Counter0 nh∆∞ng Timer/Counter2 c√≥ ƒë·∫øn 4 ch·∫ø ƒë·ªô ho·∫°t ƒë·ªông nh∆∞ Timer/Counter1, ngo√Ýi ra n√≥ n√≥ c√≤n ƒë∆∞·ª£c s·ª≠ d·ª•ng nh∆∞ m·ªôt module canh ch·ªânh th·ªùi gian cho c√°c ·ª©ng d·ª•ng th·ªùi gian th·ª±c C√°c ch·ª©c nƒÉng ch√≠nh:K√™nh ƒë·∫øm so s√°nh ƒë∆°n. X√≥a timer khi ƒë·∫°t t·ªõi gi√° tr·ªã so s√°nh. Ch·∫ø ƒë·ªô PWM. ƒê·∫øm s·ª± ki·ªán b√™n ngo√Ýi. B·ªô chia t·∫ßn s·ªë 10 bit. Ng·∫Øt khi tr√Ýn ho·∫∑c t·∫°i gi√° tr·ªã so s√°nh.#13: 2.3.1 Ch·∫ø ƒë·ªô th√¥ng th∆∞·ªùng ƒê√¢y l√Ý ch·∫ø ƒë·ªô ho·∫°t ƒë·ªông ƒë∆°n gi·∫£n nh·∫•t c·ªßa Timer. B·ªô ƒë·∫øm s·∫Ω li√™n t·ª•c ƒë·∫øm tƒÉng l√™n cho ƒë·∫øn khi v∆∞·ª£t qu√° gi√° tr·ªã l·ªõn nh·∫•t TOP v√Ý sau ƒë√≥ s·∫Ω ƒë∆∞·ª£c kh·ªüi ƒë·ªông l·∫°i t·∫°i gi√° tr·ªã Bottom. Trong c√°c ho·∫°t ƒë·ªông th√¥ng th∆∞·ªùng th√¨ c·ªù tr√Ýn s·∫Ω ƒë∆∞·ª£c thi·∫øt l·∫≠p khi gi√° tr·ªã trong Timer ƒë·∫°t gi√° tr·ªã kh√¥ng v√Ý kh√¥ng b·ªã x√≥a ƒëi. Tuy nhi√™n n·∫øu m√Ý ng·∫Øt tr√Ýn ƒë∆∞·ª£c ch·∫•p nh·∫≠n th√¨ c·ªù ng·∫Øt s·∫Ω t·ª± ƒë·ªông b·ªã x√≥a khi ng·∫Øt ƒë∆∞·ª£c th·ª±c hi·ªán. Gi√° tr·ªã trong Timer c√≥ th·ªÉ ƒë∆∞·ª£c vi·∫øt v√Ýo b·∫•t c·ª© l√∫c n√Ýo.2.3.2 Ch·∫ø ƒë·ªô so s√°nh(CTC). ƒê√¢y l√Ý ch·∫ø ƒë·ªô m√Ý gi√° tr·ªã trong Timer lu√¥n ƒë∆∞·ª£c so s√°nh v·ªõi gi√° tr·ªã trong thanh ghi ORC. Khi gi√° tr·ªã trong Timer b·∫±ng gi√° tr·ªã trong thanh ghi ORC th√¨ gi√° tr·ªã trong Timer s·∫Ω b·ªã x√≥a ƒëi. Gi√° tr·ªã trong ORC ƒë√≥ng vai tr√≤ l√Ý gi√° tr·ªã Top cho b·ªô ƒë·∫øm. Ch·∫ø ƒë·ªô n√Ýy c≈©ng cho ph√©p t·∫°o ra t·∫ßn s·ªë so s√°nh ·ªü ƒë·∫ßu ra. Tuy nhi√™n trong ch·∫ø ƒë·ªô n√Ýy n·∫øu gi√° tr·ªã m·ªõi ghi v√Ýo thanh ghi ORC m√Ý nh·ªè h∆°n gi√° tr·ªã t·ª©c th·ªùi c·ªßa b·ªô ƒë·∫øm th√¨ 1 so s√°nh s·∫Ω b·ªã l·ª°, khi ƒë√≥ b·ªô ƒë·∫øm s·∫Ω ƒë·∫øm ƒë·∫øn gi√° tr·ªã l·ªõn nh·∫•t sau ƒë√≥ r∆°i xu·ªëng gi√° tr·ªã 0 tr∆∞·ªõc khi so s√°nh ti·∫øp theo xu·∫•t hi·ªán.2.3.3 Ch·∫ø ƒë·ªô Fast PWM. Cho ph√©p t·∫°o ra s√≥ng v·ªõi t·∫ßn s·ªë cao. S·ª± kh√°c bi·ªát c∆° b·∫£n gi·ªØa Fast PWM v·ªõi c√°c lo·∫°i PWM kh√°c l√Ý n√≥ ch·ªâ s·ª≠ d·ª•ng 1 s∆∞·ªùn d·ªëc. B·ªô ƒë·∫øm s·∫Ω ƒë·∫øm t·ª´ Bottom ƒë·∫øn Max sau ƒë√≥ kh·ªüi ƒë·ªông l·∫°i t·ª´ Bottom. Trong ch·∫ø ƒë·ªô kh√¥ng ƒë·∫£o ƒë·∫ßu ra c·ªßa ch√¢n so s√°nh Ocx s·∫Ω b·ªã x√≥a khi c√≥ ph√©p to√°n so s√°nh gi·ªØa TCNTx v√Ý thanh ghi ORC l√Ý b·∫±ng nhau. V√Ý s·∫Ω ƒë∆∞·ª£c set l√™n 1 khi gi√° tr·ªã ƒë·∫°t Bottom. Trong ch·∫ø ƒë·ªô ƒë·∫£o, ƒë·∫ßu ra ƒë·∫£o s·∫Ω ƒë∆∞·ª£c set l√™n 1 khi s·ª± so s√°nh gi·ªØa thanh ghi ORC v√Ý gi√° tr·ªã trong Timer b·∫±ng nhau v√Ý s·∫Ω b·ªã x√≥a khi gi√° tr·ªã ƒë·∫°t Bottom. Trong c·∫£ hai tr∆∞·ªùng h·ª£p n√Ýy t·∫ßn s·ªë c·ªßa ch·∫ø ƒë·ªô Fast PWM ƒë·ªÅu g·∫•p ƒë√¥i so v·ªõi ch·∫ø ƒë·ªô Phase correct PWM s·ª≠ d·ª•ng 2 s∆∞·ªùn d·ªëc. V·ªõi t·∫ßn cao n√Ýy ch·∫ø ƒë·ªô Fast PWM r·∫•t t·ªët cho c√°c ∆∞ng d·ª•ng nh∆∞ ADC hay ch·ªânh l∆∞u. Ngo√Ýi ra v·ªõi t·∫ßn s·ªë cao gi√∫p l√Ým gi·∫£m k√≠ch th∆∞·ªõc c·ªßa thi·∫øt b·ªã ngo√Ýi nh∆∞ cu·ªôn d√¢y t·ª• t·ª´ ƒë√≥ gi√∫p l√Ým gi·∫£m to√Ýn b·ªô chi ph√≠ cho h·ªá th·ªëng.2.3.4 Ch·∫ø ƒë·ªô Phase correct PWM. Ch·∫ø ƒë·ªô n√Ýy ho·∫°t ƒë·ªông d·ª±a tr√™n hai s∆∞·ªùn l√™n xu·ªëng. B·ªô ƒë·∫øm s·∫Ω ƒë·∫øm li√™n t·ª•c t·ª´ gi√° tr·ªã Bottom ƒë·∫øn gi√° tr·ªã Max v√Ý sau ƒë√≥ t·ª´ gi√° tr·ªã Max ƒë·∫øn gi√° tr·ªã Bottom. Trong ch·∫ø ƒë·ªô so s√°nh kh√¥ng ƒë·∫£o ch√¢n so s√°nh s·∫Ω b·ªã x√≥a khi gi√° tr·ªã TCNTx b·∫±ng gi√° tr·ªã OCRx trong qu√° tr√¨nh ƒë·∫øm l√™n v√Ý s·∫Ω ƒë∆∞·ª£c set b·∫±ng 1 khi gi√° tr·ªã so s√°nh xu·∫•t hi·ªán trong qu√° tr√¨nh ƒë·∫øm xu·ªëng. Ch·∫ø ƒë·ªô so s√°nh ƒë·∫£o th√¨ c√°c gi√° tr·ªã l√Ý ng∆∞·ª£c l·∫°i. V·ªõi ho·∫°t ƒë·ªông hai s∆∞·ªùn xung n√Ýy th√¨ ch·∫ø ƒë·ªô n√Ýy kh√¥ng t·∫°o ra ƒë∆∞·ª£c t·∫ßn s·ªë nh·ªè nh∆∞ ch·∫ø ƒë·ªô m·ªôt s∆∞·ªùn xung. Nh∆∞ng do t√≠nh c√¢n ƒë·ªëi c·ªßa hai s∆∞·ªùn xung th√¨ n√≥ t·ªët h∆°n cho ƒëi·ªÅu khi·ªÉn ƒë·ªông c∆°. Ch·∫ø ƒë·ªô Phase correct PWM ho·∫°t ƒë·ªông c·ªë ƒë·ªãnh 8 bit. Trong ch·∫ø ƒë·ªô n√Ýy b·ªô ƒë·∫øm s·∫Ω tƒÉng cho ƒë·∫øn khi ƒë·∫°t gi√° tr·ªã Max, khi ƒë√≥ n√≥ s·∫Ω ƒë·ªïi chi·ªÅu ƒë·∫øm.#15: Khi ƒë·∫∑t v√Ýo trong t·ª´ tr∆∞·ªùng m·ªôt gi√¢y d·∫´n v√Ý cho d√≤ng ƒëi·ªán ch·∫°y qua d√¢y d·∫´n th√¨ t·ª´ tr∆∞·ªùng s·∫Ω t√°c d·ª•ng m·ªôt l·ª±cv√Ýo d√≤ng ƒëi·ªán v√Ý l√Ým d√¢y d·∫´n chuy·ªÉn ƒë·ªông.Chi·ªÅu c·ªßa l·ª±c ƒë∆∞·ª£c x√°c ƒë·ªãnh b·∫±ng quy t·∫Øc b√Ýn tay tr√°i. ƒê√¢y ch√≠nh l√Ý nguy√™n l√Ω l√Ým vi·ªác c·ªßa ƒë·ªông c∆° n√≥i chung V·ªÅ ƒë·ªông c∆° m·ªôt chi·ªÅu :T·ª´ tr∆∞·ªùng trong ƒë·ªông c∆° t·∫°o ra t·ª´ c√°c cu·ªôn d√¢y g·ªçi l√Ý cu·ªôn c·∫£m hay cu·ªôn k√≠ch t·ª´ .Do stator c·ªßa ƒë·ªông c∆° c√≥ ƒë·∫∑t c√°c cu·ªôn c·∫£m n√™n th∆∞·ªùng g·ªçi l√Ý ph·∫ßn c·∫£m.T·ª´ tr∆∞·ªùng do cu·ªôn c·∫£m t·∫°o ra s·∫Ω t√°c d·ª•ng m·ªôt l·ª±c v√Ýo c√°c d√¢y d·∫´n rotor ƒë·∫∑t trong c√°c r·∫£nh c·ªßa rotor khi c√≥ d√≤ng ƒëi·ªán ch·∫°y qua. Cu·ªôn d√¢y n√Ýy g·ªçi l√Ý cu·ªôn ·ª©ng. D√≤ng ƒëi·ªán ƒë∆∞a v√Ýo cu·ªôn ·ª©ng qua c√°c ch·ªïi than v√Ý c·ªï g√≥p.Ph·∫ßn rotor mang ph·∫ßn ·ª©ng n√™n g·ªçi l√Ý ph·∫ßn ·ª©ng #17: Ã˝- Khi ch∆∞a nh√¢n n√∫t, ch√¢n PC0 v√Ý ch√¢n PC1 ·ªü m·ª©c 0, r∆°le kh√¥ng ho·∫°t ƒë·ªông, ƒëi·ªán √°p ·ªü 2 ƒë·∫ßu c·ªßa ƒë·ªông c∆° b·∫±ng Uv√Ýo (12V) => ƒë·ªông c∆° kh√¥ng ho·∫°t ƒë·ªông.- Khi nh·∫•n n√∫t quay thu·∫≠n, t√≠n hi·ªáu ƒë∆∞·ª£c ƒë∆∞a ƒë·∫øn vi ƒëi·ªÅu khi·ªÉn, vi ƒëi·ªÅu khi·ªÉn nh·∫≠n v√Ý x·ª≠ l√≠ t√≠n hi·ªáu => sau ƒë√≥ ƒë∆∞a t√≠n hi·ªáu qua ch√¢n PC0 v√Ý ch√¢n PC1. Ch√¢n PC0 t√≠ch m·ª©c 1, ch√¢n PC1 t√≠ch m·ª©c 0 => transistor khu·∫øch ƒë·∫°i => ƒëi·ªÅu khi·ªÉn r∆°le1 ho·∫°t ƒë·ªông, r∆°le2 kh√¥ng ho·∫°t ƒë√¥ng => ƒêi·ªán √°p ƒë·∫∑t v√Ýo 2 ƒë·∫ßu ƒë·ªông c∆° l√Ý kh√°c nhau (12V ‚Äì ~0V), ƒë·ªìng th·ªùi vi ƒëi·ªÅu khi·ªÉn t·∫°o 1 xung PWM (ƒë·ªô r·ªông kho·∫£ng 70%) tr√™n ch√¢n PD7 => qua TIP41 khu·∫øch ƒë·∫°i t√≠n hi·ªáu ƒë∆∞a v√Ýo ƒë·∫ßu c√≤n l·∫°i c·ªßa ƒë·ªông c∆° => ƒë·ªông c∆° quay thu·∫≠n - Khi nh·∫•n n√∫t quay ng∆∞·ª£c, , t√≠n hi·ªáu ƒë∆∞·ª£c ƒë∆∞a ƒë·∫øn vi ƒëi·ªÅu khi·ªÉn, vi ƒëi·ªÅu khi·ªÉn nh·∫≠n v√Ý x·ª≠ l√≠ t√≠n hi·ªáu => sau ƒë√≥ ƒë∆∞a t√≠n hi·ªáu qua ch√¢n PC0 v√Ý ch√¢n PC1. Ch√¢n PC0 t√≠ch m·ª©c 0, ch√¢n PC1 t√≠ch m·ª©c 1 => transistor khu·∫øch ƒë·∫°i => ƒëi·ªÅu khi·ªÉn r∆°le1 ho·∫°t ƒë·ªông, r∆°le2 kh√¥ng ho·∫°t ƒë√¥ng => ƒêi·ªán √°p ƒë·∫∑t v√Ýo 2 ƒë·∫ßu ƒë·ªông c∆° l√Ý kh√°c nhau (12V ‚Äì ~0V), ƒë·ªìng th·ªùi vi ƒëi·ªÅu khi·ªÉn t·∫°o 1 xung PWM tr√™n ch√¢n PD7 => qua TIP41 khu·∫øch ƒë·∫°i t√≠n hi·ªáu ƒë∆∞a v√Ýo ƒë·∫ßu c√≤n l·∫°i c·ªßa ƒë·ªông c∆° => ƒë·ªông c∆° quay ngh·ªãch - Khi nh·∫•n n√∫t tƒÉng t·ªëc ƒë·ªô, t√≠n hi·ªáu tr√™n ch√¢n PC0 v√Ý PC1 v·∫´n gi·ªØ nguy√™n m·ª©c l√¥g√≠c. M·∫∑t kh√°c, t·∫°o m·ªôt xung PWM m·ªõi (ƒë·ªô r·ªông kho·∫£ng 99%) tr√™n ch√¢n PD7 => ch·ªëng nhi·ªÖu cho vi ƒëi·ªÅu khi·ªÉn) => qua TIP41 khu·∫øch ƒë·∫°i t√≠n hi·ªáu ƒë∆∞a v√Ýo ƒë·∫ßu c√≤n l·∫°i c·ªßa ƒë·ªông c∆° => ƒë·ªông c∆° v·∫´n quay theo chi·ªÅu nh∆∞ tr∆∞·ªõc nh∆∞ng t·ªëc ƒë·ªô nhanh h∆°n. - Khi nh·∫•n n√∫t gi·∫£m t·ªëc ƒë·ªô, t√≠n hi·ªáu tr√™n ch√¢n PC0 v√Ý PC1 v·∫´n gi·ªØ nguy√™n m·ª©c l√¥g√≠c. M·∫∑t kh√°c, t·∫°o m·ªôt xung PWM m·ªõi (ƒë·ªô r·ªông kho·∫£ng 1%) tr√™n ch√¢n PD7 => ch·ªëng nhi·ªÖu cho vi ƒëi·ªÅu khi·ªÉn) => qua TIP41 khu·∫øch ƒë·∫°i t√≠n hi·ªáu ƒë∆∞a v√Ýo ƒë·∫ßu c√≤n l·∫°i c·ªßa ƒë·ªông c∆° => ƒë·ªông c∆° v·∫´n quay theo chi·ªÅu nh∆∞ tr∆∞·ªõc nh∆∞ng t·ªëc ƒë·ªô ch·∫≠m h∆°n. - Khi nh·∫•n n√∫t RESET vi ƒëi·ªÅu khi·ªÉn, vi ƒëi·ªÅu khi·ªÉn tr·ªü v·ªÅ tr·∫°ng th√°i ban ƒë·∫ßu => ƒë·ªông c∆° ng·ª´ng ho·∫°t ƒë·ªông.Ã˝Ã˝Ã˝