NDT-TKU
Download as PPTX, PDF2 likes3,861 views

NDT-TKU is an improved 3D Normal Distributions Transform method for mobile robotic mapping proposed by Takeuchi from Nagoya University. It uses a two-stage converging process where the voxel size is adjusted based on point density during registration. This allows for higher accuracy while reducing computation compared to a single voxel size. The key aspects of NDT-TKU include overlapping voxels, trilinear interpolation, and dividing the registration into converging and adjustment states.











![Ñ╔ÑÚÑñÑÍÑýÑ│®`Ñ└Ë│¤±ñ½ñÚñ╬3┤╬Ȭ┐ıÚgıJÎR [MOBILITY:dev]](https://cdn.slidesharecdn.com/ss_thumbnails/20191031mobilitydevmiyazawa-191031085336-thumbnail.jpg?width=560&fit=bounds)






















More Related Content
What's hot (20)
Similar to NDT-TKU (20)
















![[20240422_LabSeminar_Huy]Taming_Effect.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/20240422labseminarhuytamingeffect-240423153149-d879b2ce-thumbnail.jpg?width=560&fit=bounds)

Recently uploaded (20)




















NDT-TKU
- 2. What is ndt_tku ?A 3-D Scan Matching using Improved 3-D Normal Distributions Transform for Mobile Robotic Mapping ?├¹╣┼╬¦┤¾îW ͱâ╚¤╚╔·(TAKEUCHI)╠ß│÷Á─ NDT â×╗»░µ ?Autoware/ros/src/computing/perception/localization/packages/n dt_localizer/nodes/ndt_matching_tku/
- 3. Why is ndt_tku ?╩Ãͩ╠╩┌╠ß│÷Á─ ?PCL Á─ cuda ╗»ÿOÂ╚┬Úƒ®ú¼╣ñ│╠ă▒Ý╩¥▓╗╚þÎÈÄÍÊ╗╠Îú¼╚╗ßß cuda ╗»
- 4. Outline ndt_tku ? ND ? NDT in slam ? NDT_TKU
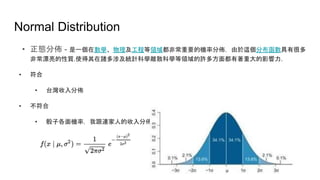
- 5. Normal Distribution ? ı²æBÀÍüÐ - ╩ÃÊ╗éÇÈ┌öÁîWíó╬´└Ý╝░╣ñ│╠Á╚¯IË‗Â╝ÀÃ│úÍÏʬÁ─ÖC┬╩ÀÍüÐú¼Ë╔ýÂ▀@éÇÀÍ▓╝║»öÁ¥▀Ëð║▄ÂÓ ÀÃ│úã»┴┴Á─ðÈ┘|.╩╣Á├ãõÈ┌ÍTÂÓ╔µ╝░¢yËï┐ãîWÙx╔ó┐ãîWÁ╚¯IË‗Á─ÈSÂÓÀ¢├µÂ╝ËðÍ°ÍÏ┤¾Á─Ë░Ýæ┴ª. ? À¹║¤ ? ╠¿×│╩ı╚ÙÀÍüÐ ? ▓╗À¹║¤ ? ¸╗ÎË©¸├µÖC┬╩ú¼╬Ê©·▀B╝Ê╚╦Á─╩ı╚ÙÀÍüÐíú
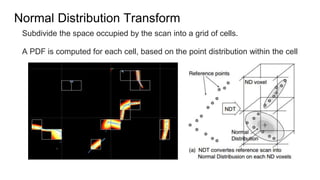
- 6. Normal Distribution Transform Subdivide the space occupied by the scan into a grid of cells. A PDF is computed for each cell, based on the point distribution within the cell
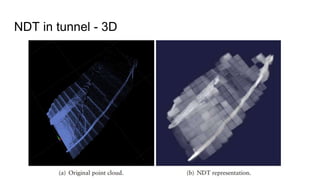
- 7. NDT in tunnel - 3D
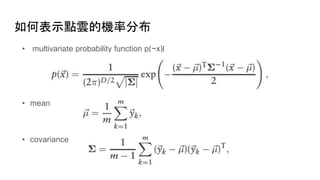
- 8. ╚þ║╬▒Ý╩¥³cÙàÁ─ÖC┬╩ÀÍ▓╝ ? multivariate probability function p(~x)l ? mean ? covariance
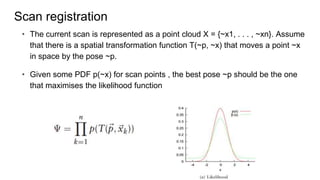
- 9. Scan registration ? The current scan is represented as a point cloud X = {~x1, . . . , ~xn}. Assume that there is a spatial transformation function T(~p, ~x) that moves a point ~x in space by the pose ~p. ? Given some PDF p(~x) for scan points , the best pose ~p should be the one that maximises the likelihood function
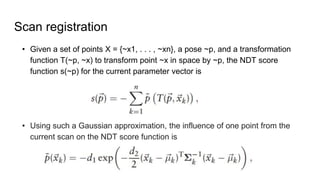
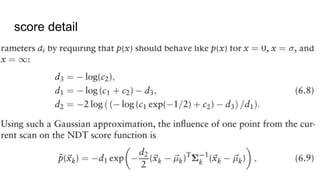
- 10. Scan registration ? Given a set of points X = {~x1, . . . , ~xn}, a pose ~p, and a transformation function T(~p, ~x) to transform point ~x in space by ~p, the NDT score function s(~p) for the current parameter vector is ? Using such a Gaussian approximation, the influence of one point from the current scan on the NDT score function is
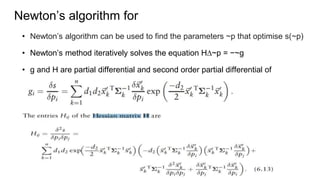
- 11. Newtoní»s algorithm for ? Newtoní»s algorithm can be used to find the parameters ~p that optimise s(~p) ? Newtoní»s method iteratively solves the equation H?~p = ?~g ? g and H are partial differential and second order partial differential of optimizing function. They are
- 12. ┴¸│╠
- 14. About ND Voxel size ? ╠½ðí ? ▀\╦Ò┴┐┤¾ú¼memory ¤¹║─┤¾ ? ãÑ┼õ¥½┤_ ? Á½ðíýÂ╬Õédzcú¼ät║▄Ùyð╬│╔ı²æBÀÍüÐ ? ╠½┤¾ ? ▀\╦Ò┴┐╔┘ ? ãÑ┼õ▓╗¥½┤_
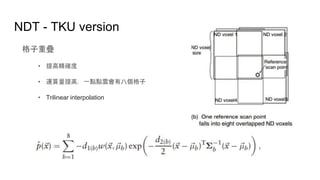
- 15. NDT - TKU version ©±ÎËÍÏ»B ? ╠ß©▀¥½┤_Â╚ ? ▀\╦Ò┴┐╠ß©▀ú¼Ê╗³c³cÙàò■Ëð░╦éÇ©±ÎË ? Trilinear interpolation
- 16. ═╝ã¼Ëð©ð
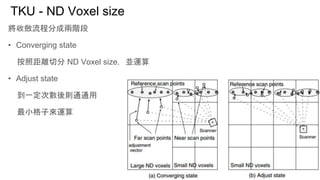
- 17. TKU - ND Voxel size îó╩ıö┐┴¸│╠ÀÍ│╔â╔ÙAÂ╬ ? Converging state ░┤ıı¥ÓÙxÃðÀÍ ND Voxel sizeú¼üK▀\╦Ò ? Adjust state Á¢Ê╗¿┤╬öÁßßät═¿═¿Ë├ ίðí©±ÎËüÝ▀\╦Ò
- 18. ENDING THANKs FOR YOUR ATTENTION. Reference 1. A 3-D Scan Matching using Improved 3-D Normal Distributions Transform for Mobile Robotic Mapping(¥W┬À╔¤▓╗╣½Ú_) 2. The Three-Dimensional Normal-Distributions Transform í¬ an Efficient Representation for Registration, Surface Analysis, and Loop Detection 3. The Normal Distributions Transform:A New Approach to Laser Scan Matching
- 19. Other 1. Parameter a. voxel size b. step size c. iterative times
- 20. score detail
Editor's Notes
- #4: ╦õ╚╗╩ÃıÔШ╦Áú¼Á½╩ÃıÔ╩Ã║├╝©Í▄Ã░╦ÁÁ─
- #6: ┴¼ð°Á─ú¼╩²ÐºÍ╗ʬ─▄▒Ý╩¥│÷└┤¥═─▄╦Ò
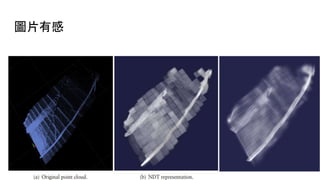
- #7: ¤╚Ãð│╔Ê╗©±Ê╗©± The normal-distributions transform can be described as a method for compactly representing a surface. ı²æBÀÍüТo│÷┴╦³cÙàÁ─ÀÍÂ╬ã¢╗¼▒Ý╩¥ú¼¥▀Ëð▀B└mÁ─îºöÁíú ├┐éÇPDF┐╔ÊÈ┐┤θ╩Ã¥Í▓┐▒Ý├µÁ─¢³╦ãÍÁú¼├Þ╩÷┴╦▒Ý├µÁ─╬╗Í├ÊÈ╝░ãõ╚í¤‗║═ã¢╗¼Â╚íú A 2D laser scan from a mine tunnel (shown as points) and the PDFs describing the surface shape. Each cell is a square with 2 m side length in this case. Brighter areas represent a higher probability. PDFs have been computed only for cells with more than five points.
- #8: 3D-NDT surface representation for a tunnel section, seen from above. Brighter, denser parts represent Higher probabilities. The cells have a side length of 1 m
- #9: D-dimensional normal random process, the likelihood of having measured ~x is where ~yk=1,..., m are the positions of the reference scan points contained in the cell. ı²æBÀÍüТo│÷┴╦³cÙàÁ─ÀÍÂ╬ã¢╗¼▒Ý╩¥ú¼¥▀Ëð▀B└mÁ─îºöÁíú ├┐éÇPDF┐╔ÊÈ┐┤θ╩Ã¥Í▓┐▒Ý├µÁ─¢³╦ãÍÁú¼├Þ╩÷┴╦▒Ý├µÁ─╬╗Í├ÊÈ╝░ãõ╚í¤‗║═ã¢╗¼Â╚íú ð¡À¢▓¯¥Ïı¾Á─╠Ïı¸¤‗┴┐║═╠Ïı¸ÍÁ┐╔ÊÈ▒Ý┤´▒Ý├µð┼¤ó . Each PDF can be seen as an approximation of the local surface, describing the position of the surface as well as its orientation and smoothness
- #10: «öÃ░Æ▀├Þ▒╗▒Ý╩¥×Ú³cÙàX = {?x1ú¼...íú íú íú ú¼?xn}íú ╝┘ÈOËðÊ╗éÇ┐ıÚgÎâôQ║»öÁTú¿?pú¼?xú®═¿▀^Î╦æBpÊãäË┐ıÚgÍðÁ─³c?xíú ¢o¿Ê╗ð®Ë├ýÂÆ▀├Þ³cÁ─PDF pú¿?xú®ú¿└²╚þú¼Á╚╩¢6.1ú®ú¼Î¯╝ÐÎ╦æBpæ¬Èô╩Ãί┤¾╗»╦ã╚╗║»öÁÁ─Î╦æB ╩╣Ë├¢³╦ãÀ¿╚Ñ╚íÁ├ί¢³ÍÁ, ▀@╩ÃÊ╗éÇ»B┤·▀^│╠ nîW╔·╔Ý©▀(X) ¿ñ X~(135, 102)
- #11: ╩ıö┐Á─àóöÁËï╦Ò îW┴ªã½▓¯ÍÁú¼╔¤Ê╗ÝôÁ─ -4 , -2 , 0 , 2 , 4 ú¼×ÚÍ╗▒Ý╩¥Á─³cÍÁı²ÊÄ╗»
- #12: └¤ÿËÎË│¼▀^15éÇÀ¹╠û╬Êéâ¥═▓╗ʬ└Ýò■ https://www.youtube.com/watch?v=Quw4ZHLH2CY └¹Ë├╬óÀÍıÊ│÷Ãð¥Çú¼»B┤·À¿┌ࢳıÊ│÷ function = 0 Á─©¨
- #13: s
- #14: Á½©·ãõ╦¹╦ÒÀ¿▒╚╦Ò┐ý┴╦(Iterative Closest Pointú¼Á³┤·Î¯¢³ÁÒ)
- #15: ©±ÎË┤¾ðí ND Voxel size ░³║¼³cÂÓ╔┘Á─¿ÍÁú¼═¿│úÍ┴┤¾ýÂ╬Õédzcú¼ð╬│╔ı²æBÀÍ▓╝ ╠½┤¾Ê▓ò■Îînd▓╗║├ð╬│╔ Á³┤·┤╬öÁ iterative times øQ¿©±ÎË┤¾ðíÎâ│╔ί͸ʬâ×╗»Á─╩ÍÂ╬ ▒ÏÝÜ╚íøQsensor ¯Éð═
- #16: ▀@üKÀÃTKU╠ß│÷üÝÁ─íú Peter Biber and Wolfgang Stra?er: í░The Normal Distributions Transform:A New Approach to Laser Scan Matchingí▒, Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2743¿C2748, 2003 ─óN¥═ò■ðÞʬ¢ÁÁ═▀\╦Ò┴┐
- #18: ═¿│ú╩Ã╦─┤╬Ãð©¯
- #19: CODE TRANSFER TO JJ