迟蹿,迟蹿2完全理解
64 likes212,087 views

第五回ROS勉強会 @名古屋での資料です。 tfをちゃんと理解しなおそうと思ってソースを読んでかきました。 tf2の変更点にも触れています。

![tf::Transformer 図解
tf::Transformer
setTransform()
座標系の更新を通知
以下の情報を伝える。
?自分のフレーム名
?子のフレーム名
?更新時間
?自分から子への座標変換
tf::TimeCache[] ※重要メンバ
キャッシュにストア
lookupTransform()
時間を指定して、座標の読み
だし。ツリーをたどって変換。
フレーム毎に時間管理
/frame_1 /frame_2 /frame_3 /frame_4
WalkToTopParent() ※重要メソッド
ツリー構築のための
データ収集
※重要インターフェイス
canTransform()
時間を指定して、ツリーが
その時間に存在するかを調べる
同じメソッドで解決
/frame_1
/frame_2
/root
/frame_3
/frame_4
ツリーの構築
と変換](https://image.slidesharecdn.com/tf-150410215624-conversion-gate01/85/tf-tf2-16-320.jpg)
![tf::Transformer 図解
tf::Transformer
setTransform()
座標系の更新を通知
以下の情報を伝える。
?自分のフレーム名
?子のフレーム名
?更新時間
?自分から子への座標変換
tf::TimeCache[] ※重要メンバ
キャッシュにストア
lookupTransform()
時間を指定して、座標の読み
だし。ツリーをたどって変換。
フレーム毎に時間管理
/frame_1 /frame_2 /frame_3 /frame_4
WalkToTopParent() ※重要メソッド
ツリー構築のための
データ収集
※重要インターフェイス
canTransform()
時間を指定して、ツリーが
その時間に存在するかを調べる
同じメソッドで解決
/frame_1
/frame_2
/root
/frame_3
/frame_4](https://image.slidesharecdn.com/tf-150410215624-conversion-gate01/85/tf-tf2-17-320.jpg)
![TimeCache(クラス)
? タイムスタンプで並んだTransformを管理。
– 離散的な時間のキャッシュから、任意の時間の座標変換
を取得
– 正しくキャッシュにデータをストア
– デフォルトで最新のデータより10[s]以前のデータは消去
– 補間を行う 位置は線形補間、姿勢はSlerp※
– 補外はしない
時間
↑
transform n-1
↑
transform n
※Slerpは姿勢版の線形補間
getDataは2つのTransform間の
線形補間を返す](https://image.slidesharecdn.com/tf-150410215624-conversion-gate01/85/tf-tf2-18-320.jpg)
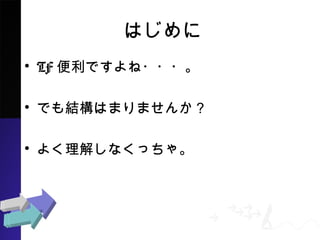
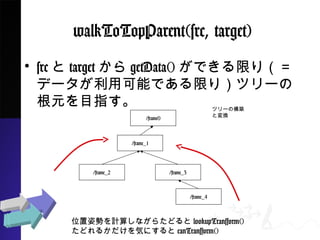
![TimeCache::getData()
? データの得できる条件はそのデータを時間
的に挟むデータがあること
時間
transformが入ってきた時間
getDataが可能な時間
getDataが不可能な時間
getDataが可能
getDataが不可能
最新より10[s]たちgetDataが不可能な時
間
10.0[s]](https://image.slidesharecdn.com/tf-150410215624-conversion-gate01/85/tf-tf2-19-320.jpg)
![tf::Transformer 図解
tf::Transformer
setTransform()
座標系の更新を通知
以下の情報を伝える。
?自分のフレーム名
?子のフレーム名
?更新時間
?自分から子への座標変換
tf::TimeCache[] ※重要メンバ
キャッシュにストア
lookupTransform()
時間を指定して、座標の読み
だし。ツリーをたどって変換。
フレーム毎に時間管理
/frame_1 /frame_2 /frame_3 /frame_4
WalkToTopParent() ※重要メソッド
ツリー構築のための
データ収集
※重要インターフェイス
canTransform()
時間を指定して、ツリーが
その時間に存在するかを調べる
同じメソッドで解決
/frame_1
/frame_2
/root
/frame_3
/frame_4](https://image.slidesharecdn.com/tf-150410215624-conversion-gate01/85/tf-tf2-21-320.jpg)
![/frame_1
/frame_2
/frame_0
/frame_3
/frame_4
transformが入ってきた時間
getDataが可能な時間
getDataが不可能な時間
最新より10[s]たちgetDataが不可能な時
間
時間
/frame_1
/frame_2
/frame_3
/frame_4
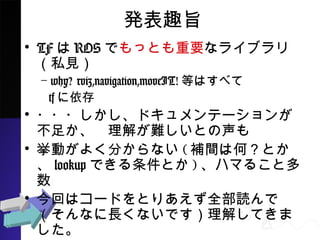
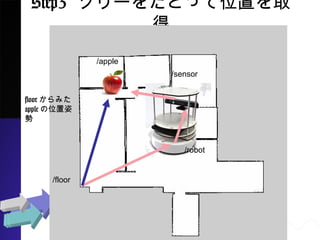
いつの時間のTFが取れるか?
これがTFをしっかり理解するために
非常に重要
今frame_2とframe_4の変換を取りたい。
どうすればいいだろうか?](https://image.slidesharecdn.com/tf-150410215624-conversion-gate01/85/tf-tf2-24-320.jpg)
![/frame_1
/frame_2
/frame_0
/frame_3
/frame_4
transformが入ってきた時間
getDataが可能な時間
getDataが不可能な時間
最新より10[s]たちgetDataが不可能な時
間
時間
/frame_1
/frame_2
/frame_3
/frame_4
パターン1. 時間をros::Time::now()で取得
─> NG
ros::Time::now()
はここを見る](https://image.slidesharecdn.com/tf-150410215624-conversion-gate01/85/tf-tf2-25-320.jpg)
![/frame_1
/frame_2
/frame_0
/frame_3
/frame_4
transformが入ってきた時間
getDataが可能な時間
getDataが不可能な時間
最新より10[s]たちgetDataが不可能な時
間
時間
/frame_1
/frame_2
/frame_3
/frame_4
パターン2. 時間をros::Time(0)で取得
─> NG
ros::Time(0)はここを見る
/frame_2と/frame_4の共通の最新](https://image.slidesharecdn.com/tf-150410215624-conversion-gate01/85/tf-tf2-26-320.jpg)
![/frame_1
/frame_2
/frame_0
/frame_3
/frame_4
transformが入ってきた時間
getDataが可能な時間
getDataが不可能な時間
最新より10[s]たちgetDataが不可能な時
間
時間
/frame_1
/frame_2
/frame_3
/frame_4
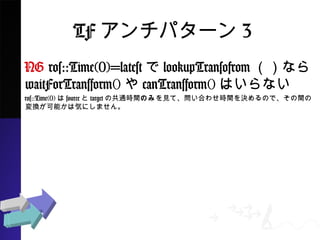
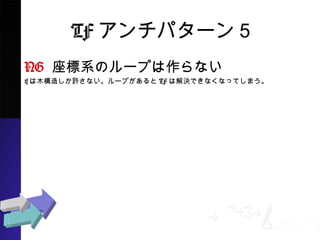
パターン3. 取れる時間の範囲の中で指定
─> OK ???でもその時間をどうやって
この範囲が取れる時間](https://image.slidesharecdn.com/tf-150410215624-conversion-gate01/85/tf-tf2-27-320.jpg)
![/frame_1
/frame_2
/frame_0
/frame_3
/frame_4
transformが入ってきた時間
getDataが可能な時間
getDataが不可能な時間
最新より10[s]たちgetDataが不可能な時
間
時間
/frame_1
/frame_2
/frame_3
/frame_4
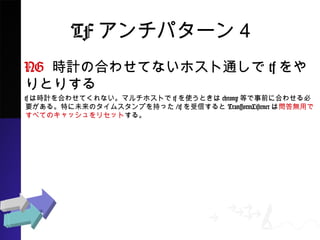
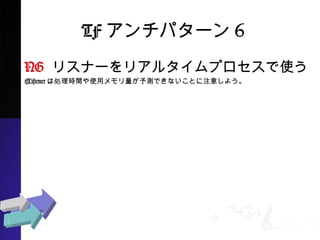
パターン4. 時間を決めて利用可能になるまで待つ
─> OK これが基本
この時間で取ると決めて
waitForTransform](https://image.slidesharecdn.com/tf-150410215624-conversion-gate01/85/tf-tf2-28-320.jpg)
![/frame_1
/frame_2
/frame_0
/frame_3
/frame_4
transformが入ってきた時間
getDataが可能な時間
getDataが不可能な時間
最新より10[s]たちgetDataが不可能な時
間
時間
/frame_1
/frame_2
/frame_3
/frame_4
パターン4. 時間を決めて利用可能になるまで待つ
─> OK これが基本
この時間で取ると決めて
waitForTransform()](https://image.slidesharecdn.com/tf-150410215624-conversion-gate01/85/tf-tf2-29-320.jpg)
迟蹿,迟蹿2完全理解
- 2. 目次 1. 自己紹介 2. はじめに 3. 発表趣旨 4. 今日のゴール 5. TFとは? 6. TFの使い方 7. 空間位置姿勢 8. 罢贵の内部构造と実装 9. TFとTF2の違いについて 10. TFアンチパターン 無駄にハマらないために 11. 結論
- 4. はじめに ? TF便利ですよね???。 ? でも結構はまりませんか? ? よく理解しなくっちゃ。
- 5. 発表趣旨 ? TFはROSでもっとも重要なライブラリ(私見) – why? rviz,navigation,moveIT!等はすべて tfに依存 ? ???しかし、ドキュメンテーションが不足か、 理解が難しいとの声も ? 挙動がよく分からない(補間は何?とか、 lookupできる条件とか)、ハマること多数 ? 今回はコードをとりあえず全部読んで(そん なに長くないです)理解してきました。
- 6. 今日のゴール ? ROS初心者 – とりあえずTFをつかってみたい!! ? ROS中級者 – TFのハマりポイントをシェアできれば。 – TFでやってはいけないことが分かった。 – TF2とTFの違いが分かった!! ? ROS上級者 – TFのContributorになろう。
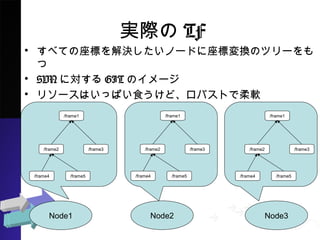
- 11. 実際のTF ? すべての座標を解決したいノードに座標変換のツリーをもつ ? SVNに対するGITのイメージ ? リソースはいっぱい食うけど、ロバストで柔軟 Node1 Node2 Node3 /frame1 /frame2 /frame3 /frame4 /frame5 /frame1 /frame2 /frame3 /frame4 /frame5 /frame1 /frame2 /frame3 /frame4 /frame5
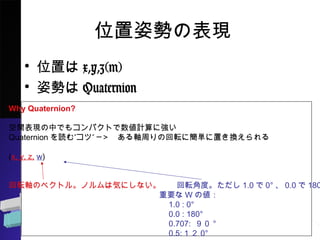
- 12. 位置姿勢の表現 ? 位置はx,y,z(m) ? 姿勢はQuaternion Why Quaternion? 空間表現の中でもコンパクトで数値計算に強い Quaternionを読む”コツ” ─> ある軸周りの回転に簡単に置き換えられる (x, y, z, w) 回転軸のベクトル。ノルムは気にしない。 回転角度。ただし1.0で0°、0.0で180° 重要なWの値: 1.0 : 0° 0.0 : 180° 0.707: 90° 0.5: 120°
- 13. 罢贵の内部构造と実装
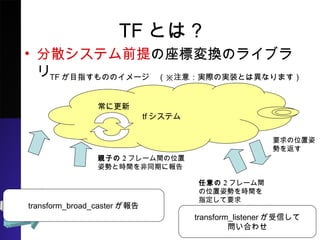
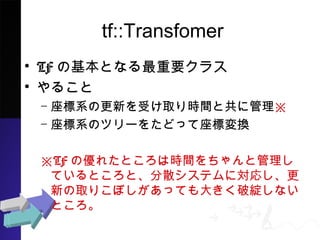
- 15. tf::Transfomer ? TFの基本となる最重要クラス ? やること – 座標系の更新を受け取り時間と共に管理※ – 座標系のツリーをたどって座標変換 ※TFの優れたところは時間をちゃんと管理してい るところと、分散システムに対応し、更新の取りこ ぼしがあっても大きく破綻しないところ。
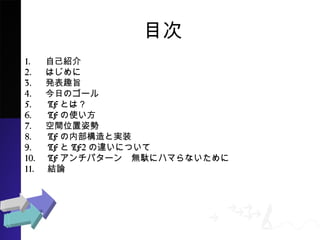
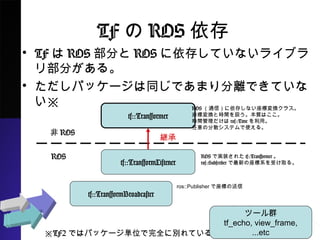
- 16. tf::Transformer 図解 tf::Transformer setTransform() 座標系の更新を通知 以下の情報を伝える。 ?自分のフレーム名 ?子のフレーム名 ?更新時間 ?自分から子への座標変換 tf::TimeCache[] ※重要メンバ キャッシュにストア lookupTransform() 時間を指定して、座標の読み だし。ツリーをたどって変換。 フレーム毎に時間管理 /frame_1 /frame_2 /frame_3 /frame_4 WalkToTopParent() ※重要メソッド ツリー構築のための データ収集 ※重要インターフェイス canTransform() 時間を指定して、ツリーが その時間に存在するかを調べる 同じメソッドで解決 /frame_1 /frame_2 /root /frame_3 /frame_4 ツリーの構築 と変換
- 17. tf::Transformer 図解 tf::Transformer setTransform() 座標系の更新を通知 以下の情報を伝える。 ?自分のフレーム名 ?子のフレーム名 ?更新時間 ?自分から子への座標変換 tf::TimeCache[] ※重要メンバ キャッシュにストア lookupTransform() 時間を指定して、座標の読み だし。ツリーをたどって変換。 フレーム毎に時間管理 /frame_1 /frame_2 /frame_3 /frame_4 WalkToTopParent() ※重要メソッド ツリー構築のための データ収集 ※重要インターフェイス canTransform() 時間を指定して、ツリーが その時間に存在するかを調べる 同じメソッドで解決 /frame_1 /frame_2 /root /frame_3 /frame_4
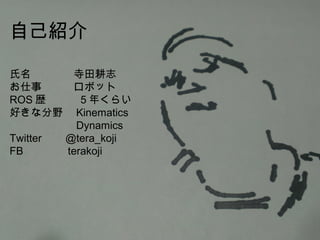
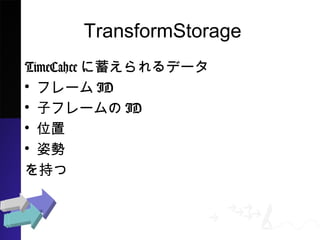
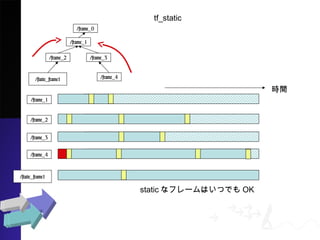
- 18. TimeCache(クラス) ? タイムスタンプで並んだTransformを管理。 – 離散的な時間のキャッシュから、任意の時間の座標変換 を取得 – 正しくキャッシュにデータをストア – デフォルトで最新のデータより10[s]以前のデータは消去 – 補間を行う 位置は線形補間、姿勢はSlerp※ – 補外はしない 時間 ↑ transform n-1 ↑ transform n ※Slerpは姿勢版の線形補間 getDataは2つのTransform間の 線形補間を返す
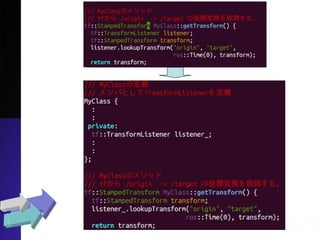
- 20. TransformStorage TimeCahceに蓄えられるデータ ? フレームID ? 子フレームのID ? 位置 ? 姿勢 を持つ
- 21. tf::Transformer 図解 tf::Transformer setTransform() 座標系の更新を通知 以下の情報を伝える。 ?自分のフレーム名 ?子のフレーム名 ?更新時間 ?自分から子への座標変換 tf::TimeCache[] ※重要メンバ キャッシュにストア lookupTransform() 時間を指定して、座標の読み だし。ツリーをたどって変換。 フレーム毎に時間管理 /frame_1 /frame_2 /frame_3 /frame_4 WalkToTopParent() ※重要メソッド ツリー構築のための データ収集 ※重要インターフェイス canTransform() 時間を指定して、ツリーが その時間に存在するかを調べる 同じメソッドで解決 /frame_1 /frame_2 /root /frame_3 /frame_4
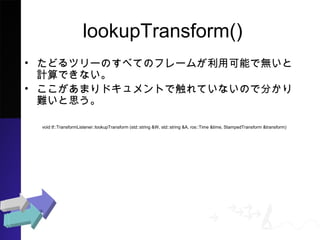
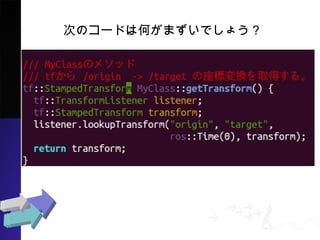
- 23. lookupTransform() ? たどるツリーのすべてのフレームが利用可能で無いと計算 できない。 ? ここがあまりドキュメントで触れていないので分かり難いと 思う。 void tf::TransformListener::lookupTransform (std::string &W, std::string &A, ros::Time &time, StampedTransform &transform)
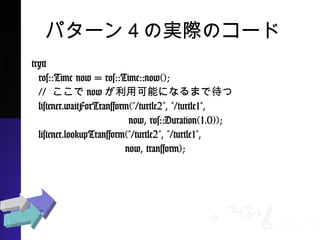
- 30. パターン4の実際のコード try{ ros::Time now = ros::Time::now(); // ここでnowが利用可能になるまで待つ listener.waitForTransform("/turtle2", "/turtle1", now, ros::Duration(1.0)); listener.lookupTransform("/turtle2", "/turtle1", now, transform);
- 33. tf vs tf2<http://wiki.ros.org/hydro/Migration#tf2.2BAC8-Migration.tf_and_tf2> ? Hydroから本格的に移行(tfもtf2で実装されている=まぜて 使える) ? アルゴリズムはほとんど変わらない ? 次の変更が大きなもの 1. tf_staticでツリーに静的なフレームを追加できる 2. ROSと綺麗に分かれた実装 3. テンプレートAPI transform()で直接native型で取り出せる 4. PythonがほぼNative実装に 5. クライアントにツリーを持たせないActionでの実装 6. /tf_prefixの削除 7. waitForTransformの機能がcanTransform,lookupTransformに 統合 8. transform_listenerとbufferの分離
- 34. tf2の変更点 tf_static ? /tfと/tf_staticのトピックがあり、tf_staticが受 け取った変換は時間に関わらずに利用可能 ? 補間とかはしない。すべて最新のデータを使う。 ? 注意点:publisherを殺してはいけない。 latched topicで利用することを想定している。
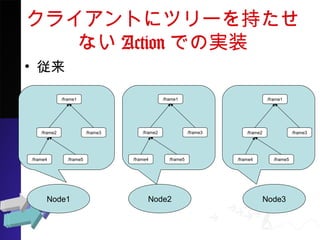
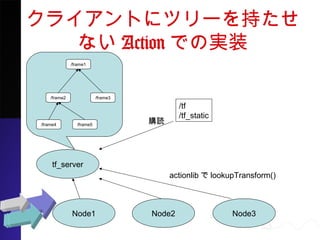
- 36. クライアントにツリーを持たせない Actionでの実装 ? 従来 Node1 Node2 Node3 /frame1 /frame2 /frame3 /frame4 /frame5 /frame1 /frame2 /frame3 /frame4 /frame5 /frame1 /frame2 /frame3 /frame4 /frame5
- 37. クライアントにツリーを持たせない Actionでの実装 tf_server Node2 Node3 /frame1 /frame2 /frame3 /frame4 /frame5 Node1 actionlibでlookupTransform() /tf /tf_static 購読
- 39. 次のコードは何がまずいでしょう?
- 42. 次のコードは何がまずいでしょう?
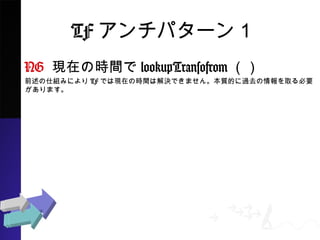
- 49. 結論 ? tfをちゃんと理解して使おう ? これから書くソフトはすべてtf2で ? 时间の扱いには十分注意